基于LQR的飛機(jī)縱向控制律設(shè)計(jì)
2021-01-28 03:08:40牛文韜黃清順
海軍航空大學(xué)學(xué)報(bào) 2020年5期
牛文韜,高 永,黃清順
(海軍航空大學(xué),山東煙臺(tái)264000)
飛機(jī)控制系統(tǒng)設(shè)計(jì)主要包括2 種方法:經(jīng)典控制理論方法和現(xiàn)代控制理論方法。其中,經(jīng)典控制理論研究方法以頻域法和根軌跡法為代表,本質(zhì)上是借助于大量直觀經(jīng)驗(yàn),按照閉環(huán)回路控制原理,依次選擇控制系統(tǒng)的結(jié)構(gòu)參數(shù);同時(shí),對(duì)于飛機(jī)的非線性和參數(shù)變化問題,采用線性化處理和調(diào)參處理等方法加以解決;最后,通過不斷地仿真和模擬試驗(yàn)優(yōu)化,得到一個(gè)良好的控制系統(tǒng)。但是,對(duì)于具有更多回路或者多輸入、多輸出的飛行控制系統(tǒng)以及現(xiàn)代戰(zhàn)斗機(jī)的高度非線性等問題,經(jīng)典控制理論已不能滿足實(shí)際需求。而現(xiàn)代控制理論可以得到系統(tǒng)的狀態(tài)變量模型,相比傳遞函數(shù)模型,它包含了更多的系統(tǒng)信息。因此,可以得到更為優(yōu)異的控制性能;同時(shí),該模型可以使多個(gè)控制回路同時(shí)閉合,并自動(dòng)地協(xié)調(diào)各回路性能,在飛行控制系統(tǒng)的設(shè)計(jì)中占據(jù)越來越重要的地位[1-2]。
20世紀(jì)50年代以來,以線性二次型調(diào)節(jié)器為核心的最優(yōu)控制設(shè)計(jì)方法,已經(jīng)成為一種應(yīng)用較廣、較成熟的飛行控制系統(tǒng)設(shè)計(jì)方法。20世紀(jì)70年代,美國(guó)成功運(yùn)用顯模型跟蹤最優(yōu)二次型法設(shè)計(jì)了F-8C 主動(dòng)控制驗(yàn)證機(jī)的控制律;80 年代,美國(guó)設(shè)計(jì)了隱模型跟蹤最優(yōu)二次型與經(jīng)典法相結(jié)合的控制律,并應(yīng)用于X-29上;X-31飛機(jī)的大迎角機(jī)動(dòng)控制律也采用了最優(yōu)二次型法。這種方法的控制對(duì)象是線性系統(tǒng)的狀態(tài)空間函數(shù),并以狀態(tài)和控制輸入的二次型函數(shù)為優(yōu)化目標(biāo),目的是設(shè)計(jì)合適的狀態(tài)反饋增益矩陣K ,使目標(biāo)函數(shù)取得最小值。K 值由加權(quán)陣Q 和R 決定,所以Q和R 的選擇是求解問題的關(guān)鍵。
利用LQR 理論設(shè)計(jì)的控制律是反饋狀態(tài)變量的線性函數(shù),可以實(shí)現(xiàn)閉環(huán)最優(yōu)控制。由于方法簡(jiǎn)單且便于實(shí)現(xiàn),還可以利用Matlab 等軟件進(jìn)行仿真計(jì)算,在工程實(shí)踐中已得到大量運(yùn)用[3-7]。應(yīng)用最優(yōu)二次型法設(shè)計(jì)控制律,一般按照如下的程序進(jìn)行:
1)簡(jiǎn)化非線性系統(tǒng)模型,設(shè)計(jì)飛機(jī)響應(yīng)的開環(huán)構(gòu)型;
2)根據(jù)簡(jiǎn)化模型設(shè)計(jì)控制律;
3)加入被忽略的高頻動(dòng)態(tài)環(huán)節(jié)和非線性特性等,修正系統(tǒng)特性;
4)對(duì)設(shè)計(jì)的飛行控制系統(tǒng)進(jìn)行飛行品質(zhì)的仿真實(shí)驗(yàn),進(jìn)一步完善系統(tǒng)。
本文以某型固定翼飛機(jī)的縱向小擾動(dòng)模型為基礎(chǔ),以C*響應(yīng)準(zhǔn)則為目標(biāo),利用顯模型跟蹤最優(yōu)二次型法對(duì)飛機(jī)的縱向控制律進(jìn)行設(shè)計(jì),并進(jìn)行了仿真驗(yàn)證。在此基礎(chǔ)上,利用低階等效系統(tǒng)方法對(duì)飛行品質(zhì)進(jìn)行了評(píng)價(jià)。
1 飛機(jī)縱向動(dòng)力學(xué)模型建立
為得到飛機(jī)的操縱性及動(dòng)態(tài)響應(yīng),須建立飛機(jī)飛行動(dòng)力學(xué)模型,并進(jìn)行小擾動(dòng)線性化處理,得到機(jī)體坐標(biāo)系下的縱向小擾動(dòng)運(yùn)動(dòng)方程如下[8]:

飛機(jī)縱向運(yùn)動(dòng)包含長(zhǎng)周期和短周期2個(gè)模態(tài)。其中,短周期模態(tài)速度的變化可以忽略,主要體現(xiàn)在迎角和俯仰角速度的快速變化,短時(shí)間對(duì)飛行員的操縱提出了很高的要求;而長(zhǎng)周期模態(tài)變化周期長(zhǎng),飛行員常在無意識(shí)情況下就修正了飛機(jī)姿態(tài),所以本文只考慮飛機(jī)的短周期模態(tài)。
假設(shè)在縱向的操縱運(yùn)動(dòng)中,油門桿的位置δp和飛機(jī)飛行高度H 始終保持不變,得到飛機(jī)的短周期方程為:

本文所設(shè)計(jì)的控制律為實(shí)現(xiàn)常規(guī)飛機(jī)響應(yīng),選用過載和俯仰角速率的組合反饋。法向過載與迎角的關(guān)系為:


由實(shí)際的飛行經(jīng)驗(yàn)可知:飛機(jī)在低速飛行過程中,法向過載的變化可忽略,飛行員更多地感受到俯仰角運(yùn)動(dòng)的變化,并通過俯仰角速率響應(yīng)來操控飛機(jī);當(dāng)飛機(jī)高速飛行時(shí),法向過載的變化過大,飛行員通過過載響應(yīng)操控飛機(jī)。由此提出2種狀態(tài)的混合響應(yīng)來進(jìn)行飛行品質(zhì)的評(píng)價(jià),即C*響應(yīng)[9],定義為:

式(5)中:vco為交叉速度,此時(shí)飛行員對(duì)二者的感覺相同,其值一般為120~132 m/s。飛行員不在飛機(jī)質(zhì)心,因而要考慮角加速度形成的過載,故:

式(6)中:l 即為飛行員到質(zhì)心的距離。
由此可得到C*的狀態(tài)空間表達(dá)式:

對(duì)式(4)、(7)進(jìn)行拉普拉斯變換,并假定初始條件為0,則有:
可得C*傳遞函數(shù):

圖1為C*開環(huán)響應(yīng)結(jié)構(gòu)。

圖1 C*開環(huán)響應(yīng)結(jié)構(gòu)Fig.1 Structure of open-loop response of C*
依據(jù)圖1可得,C*對(duì)操縱桿的傳遞函數(shù)為:

當(dāng)輸入為1 g 時(shí),C*的開環(huán)階躍響應(yīng)如圖2所示。

圖2 C*開環(huán)階躍響應(yīng)Fig.2 Open-loop step response of C*
圖3為桿力輸入為1 g 時(shí),C*響應(yīng)準(zhǔn)則。
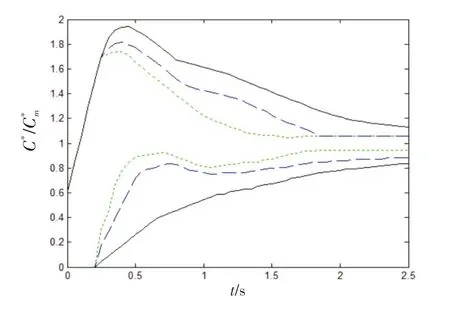
圖3 C*響應(yīng)準(zhǔn)則Fig.3 Response criterion of C*
根據(jù)圖3 所示的響應(yīng)準(zhǔn)則,對(duì)圖2 的C*響應(yīng)進(jìn)行評(píng)價(jià),結(jié)果如圖4所示。

圖4 開環(huán)C*響應(yīng)評(píng)價(jià)Fig.4 Evaluation of open-loop C*response
由圖4可知,飛機(jī)的開環(huán)C*響應(yīng)不在理想C*值的包線范圍內(nèi),飛行品質(zhì)不符合要求,下面對(duì)飛機(jī)進(jìn)行閉環(huán)控制律設(shè)計(jì),以改善飛機(jī)的飛行品質(zhì)。
2 LQR最優(yōu)控制器理論
最優(yōu)二次型設(shè)計(jì)包括輸出反饋的最優(yōu)二次型、顯模型跟蹤最優(yōu)二次型和隱模型跟蹤最優(yōu)二次型等。本文采用顯模型跟蹤最優(yōu)二次型法對(duì)飛機(jī)的縱向控制律進(jìn)行設(shè)計(jì)。模型跟蹤最優(yōu)控制是指對(duì)被控對(duì)象,選擇合適的控制作用,使閉環(huán)系統(tǒng)的輸出能夠跟蹤給定的理想模型,同時(shí)使代價(jià)函數(shù)最小,數(shù)學(xué)模型如下[10-12]:
設(shè)系統(tǒng)的狀態(tài)方程為:

響應(yīng)向量方程為:

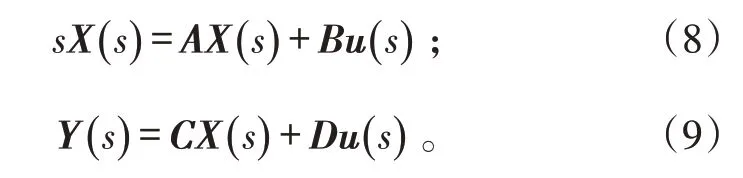
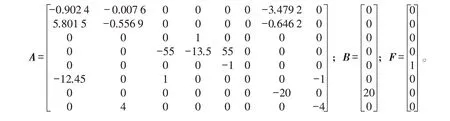
式(12)、(13)中:x ∈?n為狀態(tài)向量;u ∈?m為輸入向量;η ∈?q為隨機(jī)白噪聲過程向量;r ∈?R為輸出向量;A、B、C、D 為系統(tǒng)矩陣;F 為隨機(jī)擾動(dòng)矩陣。
最優(yōu)二次型指標(biāo)函數(shù)為:

式(14)中:Q1=CTQC ;Q2=CTQD ;Q3=DTQD ,且加權(quán)陣Q 為正定或半正定矩陣。
最優(yōu)控制可表述為,選取

使得最優(yōu)二次型指標(biāo)函數(shù)J 最小。其中最優(yōu)控制增益K :

式(16)中,P 為下述代數(shù)黎卡堤方程的解:


3 控制律設(shè)計(jì)
在控制律設(shè)計(jì)過程中,考慮了飛機(jī)高頻環(huán)節(jié)對(duì)響應(yīng)的影響,包括舵回路的高頻動(dòng)態(tài)特性和舵偏角限制的非線性特性,角速率陀螺、桿力傳感器自身的動(dòng)態(tài)特性,在系統(tǒng)特定位置的結(jié)構(gòu)陷波器動(dòng)態(tài)特性。此外,數(shù)字式電傳操作系統(tǒng)的延時(shí)特性也應(yīng)該考慮[13-15]。
設(shè)計(jì)飛機(jī)的縱向控制結(jié)構(gòu)如圖5所示。為實(shí)現(xiàn)C*響應(yīng)的顯模型跟蹤,按飛行品質(zhì)要求,設(shè)計(jì)了理想C*響應(yīng)模型。通常C*響應(yīng)模型可由一個(gè)2階環(huán)節(jié)表示:

本文取ωnm=7.9 rad/s,ζm=0.9。其值滿足MILF-8785C的一級(jí)飛行品質(zhì)要求。
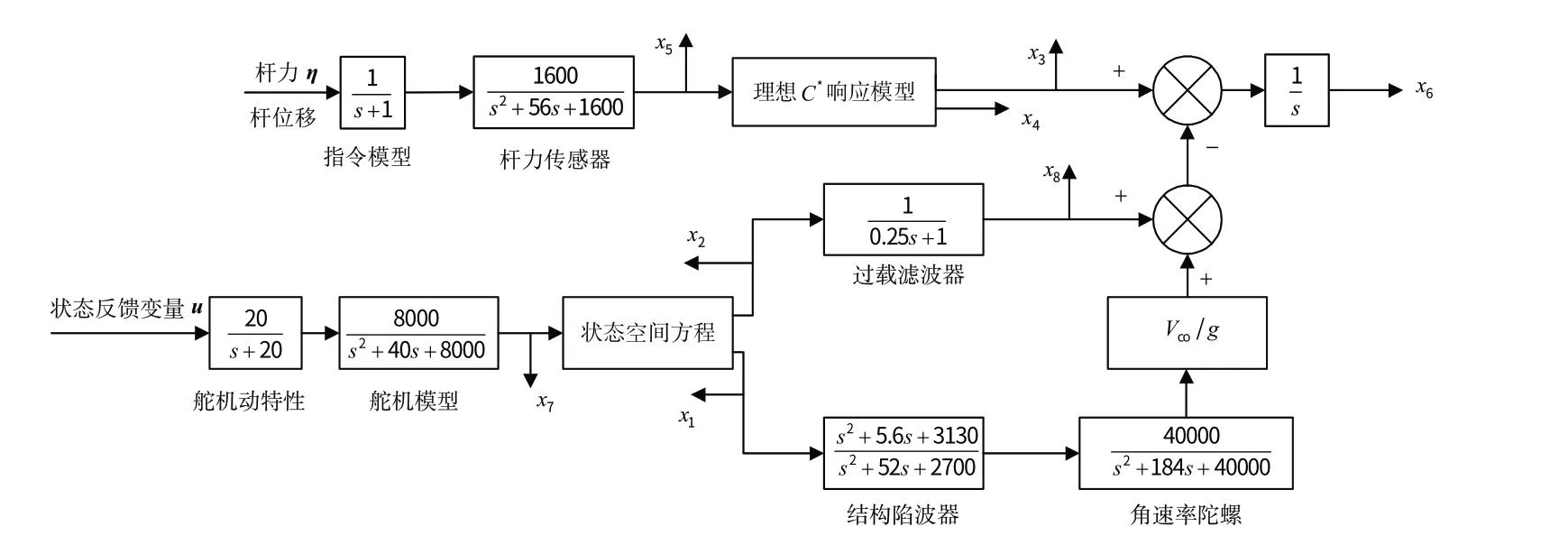
圖5 飛機(jī)閉環(huán)控制Fig.5 Closed-loop control of aircraft

最優(yōu)控制律采用全狀態(tài)反饋,含8 個(gè)狀態(tài),從圖5可以得到系統(tǒng)的各個(gè)狀態(tài)變量之間的關(guān)系:


把上述各變量代入系統(tǒng)的狀態(tài)方程,可得:
系統(tǒng)響應(yīng)分別取C*響應(yīng)與理想模型的跟蹤誤差、誤差積分、升降舵面偏轉(zhuǎn)及控制輸入4個(gè)變量:

r2誤差積分:x6;
r3舵面偏轉(zhuǎn):x7;
r4控制作用:u(t)。
由式(12)可得:

加權(quán)陣Q 的選擇并沒有規(guī)律可以遵循,而且不唯一,由于Q 矩陣對(duì)飛行品質(zhì)的影響目前仍不明確,故通常的做法仍是不斷地對(duì)矩陣中的元素進(jìn)行分析、試湊來確定。一般取Q 矩陣為對(duì)角陣,某個(gè)元素增大即增大對(duì)該響應(yīng)分量的加權(quán)。在經(jīng)過仿真計(jì)算得出反饋增益K 后,還要進(jìn)行飛行品質(zhì)的評(píng)價(jià),以確定所選Q 陣是否滿足要求[16-19]。此處選取:


給系統(tǒng)施加階躍激勵(lì),利用Simulink 進(jìn)行最優(yōu)控制仿真的仿真框圖如圖6所示。
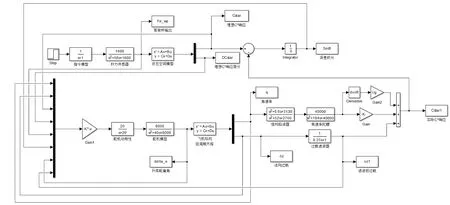
圖6 仿真框圖Fig.6 Diagram of simulation
并根據(jù)圖3對(duì)C*響應(yīng)的飛行品質(zhì)進(jìn)行評(píng)價(jià),仿真和評(píng)價(jià)結(jié)果如圖7所示:
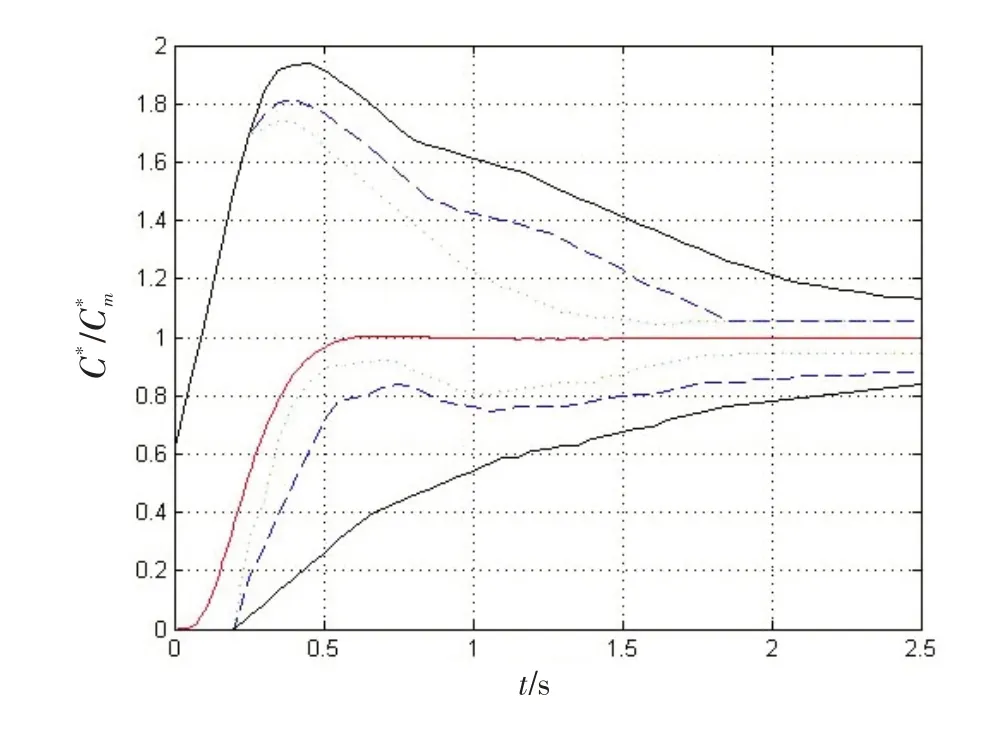
圖7 閉環(huán)C*響應(yīng)評(píng)價(jià)Fig.7 Evaluation of closed-loop C* response
同時(shí)選取系統(tǒng)8 個(gè)狀態(tài)量中的4 個(gè)狀態(tài)量,仿真結(jié)果如圖8~11所示。
由圖8~11 可知:實(shí)際C*響應(yīng)與理想C*響應(yīng)基本重合,C*誤差最大值為0.08,并且在3 s 左右達(dá)到穩(wěn)定。最大舵偏角為0.01 rad 左右,遠(yuǎn)小于非線性限制,符合最優(yōu)控制律的設(shè)計(jì)要求。

圖8 實(shí)際C*與理想C*響應(yīng)Fig.8 Actual C* response and ideal C*response

圖9 C*誤差響應(yīng)Fig.9 C* error response

圖10 俯仰角速度響應(yīng) Fig.10 Pitch rate response

圖11 升降舵偏角Fig.11 Elevator deflection angle
4 飛行品質(zhì)驗(yàn)證
在C*響應(yīng)評(píng)價(jià)的基礎(chǔ)上,進(jìn)一步對(duì)飛機(jī)的飛行品質(zhì)進(jìn)行驗(yàn)證。針對(duì)第3節(jié)加入高頻環(huán)節(jié)的飛機(jī)控制系統(tǒng),本節(jié)利用低階等效系統(tǒng)方法對(duì)飛機(jī)的飛行品質(zhì)進(jìn)行評(píng)價(jià)。高階飛機(jī)的低階等效系統(tǒng)是指2個(gè)系統(tǒng)在相同的初始條件和外界輸入下,在一定時(shí)域或頻域內(nèi),二者的輸出差值在給定的指標(biāo)函數(shù)下最小。該等效系統(tǒng)可用頻域或時(shí)域擬合的方法求得,具體的頻域等效原理如式(20)所示:
尋求GLOES( )jω 中的參數(shù),使下述指標(biāo)函數(shù)最小:

本文對(duì)法向過載和俯仰角速率進(jìn)行雙擬配。為得到飛機(jī)的頻率響應(yīng),在式(20)的基礎(chǔ)上,給出飛機(jī)俯仰軸上的法向過載與俯仰角速率的等效傳遞函數(shù):

式(21)、(22)中:Fe為桿力輸入;kq、knz為增益,τq、τn分別為q、nz的等效延遲時(shí)間;Tq為時(shí)間常數(shù)。
根據(jù)式(20)~(22)即可求得低階等效系統(tǒng)中的各參數(shù)。具體的擬配條件為:
擬配時(shí)飛機(jī)的飛行狀態(tài)為:高度5 km ,速度1.0 Ma;
飛機(jī)的飛行階段則選取:C 階段,即場(chǎng)域飛行階段;
擬配結(jié)果見表1所示。

表1 等效擬配結(jié)果Tab.1 Equivalent fitting result
根據(jù)GJB 185-86有人駕駛飛機(jī)飛行品質(zhì)要求,給出了短周期運(yùn)動(dòng)的阻尼系數(shù)等級(jí)評(píng)判標(biāo)準(zhǔn)和巡航階段CAP標(biāo)準(zhǔn),見表2以及圖12。由表2可知,該飛機(jī)短周期運(yùn)動(dòng)的阻尼系數(shù)基本達(dá)到一級(jí)飛行品質(zhì)的要求;同時(shí)對(duì)于俯仰角速度和過載的等效延遲時(shí)間也基本滿足一級(jí)飛行品質(zhì)要求。由圖12 巡航階段CAP 標(biāo)準(zhǔn)[20]可知,該飛機(jī)在巡航階段的操縱期望參數(shù)滿足一級(jí)飛行品質(zhì)要求,即能夠順利地完成各項(xiàng)任務(wù)。

表2 短周期阻尼系數(shù)等級(jí)標(biāo)準(zhǔn)Tab.2 Short period damping coefficient grade standard

圖12 CAP評(píng)價(jià)準(zhǔn)則Fig.12 Evaluation criteria of CAP
5 結(jié)論
針對(duì)飛機(jī)的縱向短周期響應(yīng)不滿足飛行品質(zhì)要求的問題,利用最優(yōu)二次型法設(shè)計(jì)飛機(jī)的控制律,對(duì)飛機(jī)的縱向響應(yīng)進(jìn)行反饋調(diào)節(jié),設(shè)計(jì)了飛機(jī)的閉環(huán)控制響應(yīng)仿真模型。仿真結(jié)果表明:所設(shè)計(jì)的控制律能夠有效改善飛機(jī)的飛行品質(zhì),且結(jié)構(gòu)簡(jiǎn)單,具有良好的適用性。由于飛機(jī)控制系統(tǒng)是一個(gè)高階增穩(wěn)系統(tǒng),所以,利用低階等效系統(tǒng)法對(duì)該系統(tǒng)進(jìn)行擬配,擬配結(jié)果表明:飛機(jī)的阻尼比、操縱期望參數(shù)能達(dá)到一級(jí)品質(zhì)要求,即能夠順利地完成各項(xiàng)任務(wù)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
石油瀝青(2021年4期)2021-10-14 08:50:44
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
中國(guó)教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07