地波雷達(dá)目標(biāo)檢測跟蹤聯(lián)合處理粒子濾波方法
2021-02-01 03:01:50付尚生紀(jì)永剛黎明王祎鳴
海洋科學(xué)進(jìn)展 2021年1期
付尚生紀(jì)永剛黎 明王祎鳴
(1.自然資源部 第一海洋研究所,山東 青島266061;2.中國海洋大學(xué) 工程學(xué)院,山東 青島266100)
高頻地波雷達(dá)(High Frequency Surface Wave Radar,HFSWR)是大范圍海上船只目標(biāo)監(jiān)視監(jiān)測的主要手段,它利用高頻電磁波(3~30 MHz)沿海面爬行來實現(xiàn)超視距的目標(biāo)(船只、低空飛機(jī)等)探測,可以實時提供運動目標(biāo)的位置和航速航向等信息,探測距離最遠(yuǎn)可達(dá)300 km,因此它又被稱地波超視距雷達(dá)[1-3]。傳統(tǒng)的高頻地波雷達(dá)目標(biāo)探測方法采用的是先檢測后跟蹤(Detect-Before-Track,DBT)的思想,該方法對于回波能量較弱、信噪比較低的目標(biāo)單時刻的檢測效果不佳,從而使得連續(xù)時刻的目標(biāo)跟蹤性能下降。檢測與跟蹤聯(lián)合處理方法可以解決弱目標(biāo)檢測困難的問題,其思路是:對單幀雷達(dá)回波數(shù)據(jù)不進(jìn)行目標(biāo)有無判斷,而是利用目標(biāo)在時空上的關(guān)聯(lián)特性和雜波噪聲的隨機(jī)性,進(jìn)行多幀數(shù)據(jù)累積,從而實現(xiàn)同一目標(biāo)的回波能量累積,由此提高目標(biāo)信噪比,完成目標(biāo)的檢測判決和航跡跟蹤。檢測與跟蹤聯(lián)合處理方法由于不設(shè)置檢測門限,能充分利用目標(biāo)回波譜的原始信息,即可減少先檢測后跟蹤過程中的點跡與航跡關(guān)聯(lián)問題,亦可降低算法復(fù)雜度[4-6]。
目前,國內(nèi)外已發(fā)展了多種檢測前跟蹤(Track-Before-Detect,TBD)方法,均可被用于實現(xiàn)地波雷達(dá)目標(biāo)檢測與跟蹤聯(lián)合處理。主要方法有:動態(tài)規(guī)劃(Dynamic Programming,DP)法[7]、粒子濾波(Particle Filter,PF)法[10]和三維匹配濾波(3-D Matched Filters)法[9]等。其中,動態(tài)規(guī)劃法將目標(biāo)的軌跡搜索問題轉(zhuǎn)換為最優(yōu)尋跡問題,對目標(biāo)跟蹤采取批處理方法,主要側(cè)重于目標(biāo)檢測的實現(xiàn)[7]。三維匹配濾波法可將運動目標(biāo)的檢測轉(zhuǎn)換為三維變換域中尋找匹配濾波器的問題,但該方法在某些情況下會導(dǎo)致不可實現(xiàn)的窮盡式搜索,限制了其性能[8-9]。粒子濾波法將目標(biāo)航跡跟蹤問題轉(zhuǎn)換為目標(biāo)的概率密度函數(shù)估計問題,相對于動態(tài)規(guī)劃、三維匹配濾波等方法,它具有估計的目標(biāo)狀態(tài)在理論上最優(yōu)的特點,適合于類似地波雷達(dá)這種非線性、非高斯的系統(tǒng),且因其遞歸結(jié)構(gòu)特點算法容易實現(xiàn)[10-11]。目前,粒子濾波法已被應(yīng)用于地波雷達(dá)目標(biāo)跟蹤,主要被用于傳統(tǒng)的先檢測后跟蹤方法中的濾波步驟,還未被用于地波雷達(dá)目標(biāo)檢測與跟蹤聯(lián)合處理。粒子濾波法已被應(yīng)用于天波雷達(dá)目標(biāo)檢測與跟蹤聯(lián)合處理,但鑒于天波雷達(dá)探測的是飛機(jī)等高速移動的目標(biāo),與地波雷達(dá)的船只目標(biāo)特性存在較大區(qū)別,并且大多是基于仿真的研究,缺乏實測數(shù)據(jù)驗證。因此,本文將粒子濾波方法應(yīng)用于地波雷達(dá)船只目標(biāo)的檢測與跟蹤聯(lián)合處理,發(fā)展適用于海上船只目標(biāo)檢測與跟蹤聯(lián)合處理的自適應(yīng)粒子濾波方法,以期解決復(fù)雜環(huán)境下的地波雷達(dá)目標(biāo)檢測和跟蹤效果較差的問題,提高地波雷達(dá)目標(biāo)的整體跟蹤性能。
1 方法原理
1.1 粒子濾波法原理
在粒子濾波法中,通過使用序貫重要性采樣方法對目標(biāo)狀態(tài)進(jìn)行采樣,得到一組帶有權(quán)值的隨機(jī)樣本即“粒子”當(dāng)采樣的樣本集足夠大的時候,經(jīng)過重要性采樣獲得的這組隨機(jī)粒子就可以用來描述目標(biāo)的后驗概率密度函數(shù)p(x1:k|Z1:k)(x1:k={x j|j=1,2,…,k}表示目標(biāo)的狀態(tài)序列,Z1:k={z1,z2,…,z k}表示目標(biāo)的量測值序列,l為似然比,k為自然數(shù))。一般在經(jīng)過多次迭代后,粒子會出現(xiàn)退化現(xiàn)象,因此,在重要性采樣結(jié)束后,還需要對粒子進(jìn)行重采樣。最終目標(biāo)狀態(tài)的后驗概率密度可表示為

式中,i為自然數(shù)。
粒子濾波的粒子權(quán)重既可以構(gòu)造檢測似然比以實現(xiàn)目標(biāo)檢測,又可以通過粒子權(quán)重與粒子狀態(tài)的加權(quán)估計目標(biāo)的狀態(tài),從而實現(xiàn)目標(biāo)的檢測與跟蹤聯(lián)合處理。粒子權(quán)重與檢測似然比之間的關(guān)系為

式中,L k為目標(biāo)k時刻的似然比;H1為目標(biāo)存在;H0為目標(biāo)不存在;p(z k|H1)為目標(biāo)存在時的概率密度;p(z k|H0)為目標(biāo)不存在時的概率密度;C i和C j為受目標(biāo)影響的單元;則目標(biāo)k時刻的遞歸似然比計算公式為
將計算得到的目標(biāo)似然比與設(shè)定的閾值進(jìn)行比較,判斷目標(biāo)是否存在。若目標(biāo)存在,則在完成粒子重采樣后按照公式進(jìn)行目標(biāo)的狀態(tài)估計。
1.2 基于粒子濾波的目標(biāo)檢測與跟蹤聯(lián)合處理方法
將高頻地波雷達(dá)回波譜按照時間順序排列構(gòu)成三維R-D-T(Range-Doppler-Time)數(shù)據(jù),如圖1所示,其單幀RD譜的2個面目標(biāo)如圖2所示。由于受到目標(biāo)本身特性(如目標(biāo)自身的大小尺寸、相對于雷達(dá)的位置和運動速度等)和雷達(dá)系統(tǒng)參數(shù)(如頻率、帶寬和積累時間等)的影響,出現(xiàn)目標(biāo)能量展寬現(xiàn)象,導(dǎo)致目標(biāo)呈現(xiàn)為面目標(biāo)。對于地波雷達(dá)目標(biāo)探測,通常采用較長時間積累(100~300 s),以得到較高的頻率分辨率并突顯目標(biāo)信號。在長時間積累過程中,運動目標(biāo)的速度和所在距離會發(fā)生一定的變化,導(dǎo)致目標(biāo)信號在多普勒維和速度維均發(fā)生一定的展寬(圖2)。實際上,在雷達(dá)距離維,由于在雷達(dá)距離解調(diào)過程中存在加窗濾波處理,對于尺寸在幾十米到幾百米的目標(biāo),或者在積累時間內(nèi)徑向距離變化只有幾十米到幾百米,甚至精致不動的目標(biāo),也會在距離維上表現(xiàn)為一定的展寬。這種展寬現(xiàn)象對粒子濾波算法中的粒子初始化步驟會產(chǎn)生影響,因此,在對目標(biāo)進(jìn)行粒子采樣的時候需要結(jié)合面目標(biāo)特性設(shè)定粒子的采樣范圍,本文在距離[Rmin,Rmax]、多普勒[Dmin,Dmax]范圍內(nèi)均勻采樣N個粒子,如圖3所示,其中,灰色區(qū)域表示目標(biāo)回波信號的展寬區(qū)域,黑色方格表示目標(biāo)雷波回波中的峰值位置。
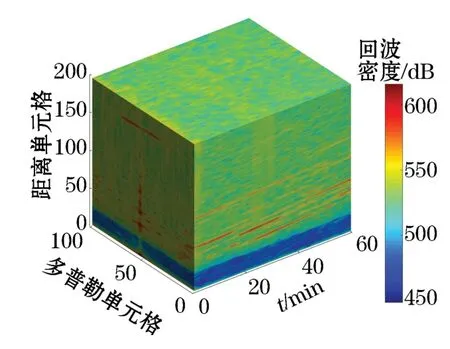
圖1 R-D-T三維數(shù)據(jù)Fig.1 R-D-T three-dimensional data
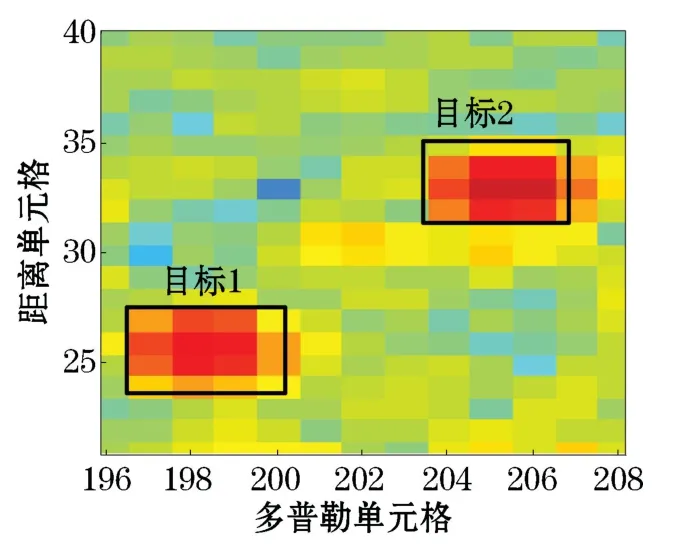
圖2 RD譜兩個展寬目標(biāo)Fig.2 RD spectrum of two broadening targets

圖3 粒子初始化Fig.3 Particle initialization
結(jié)合高頻地波雷達(dá)實測數(shù)據(jù)、目標(biāo)特性及粒子濾波探測的原理,總結(jié)出了基于粒子濾波的地波雷達(dá)目標(biāo)檢測與跟蹤聯(lián)合處理的流程,整個流程共分為5個步驟:第一步,利用多幀RD數(shù)據(jù)構(gòu)建R-D-T三維數(shù)據(jù);第二步,預(yù)處理,主要包括雜波抑制和低門限CFAR處理,對構(gòu)建的R-D-T數(shù)據(jù)中每一幀RD譜數(shù)據(jù)進(jìn)行預(yù)處理,通過預(yù)處理可以篩選出主要的目標(biāo)區(qū),剔掉明顯非目標(biāo)的信息,從而節(jié)約計算資源,提高算法效率;第三步,利用基于粒子濾波的方法提取出目標(biāo)無向航跡;第四步,估計目標(biāo)航跡的參數(shù),主要是實現(xiàn)目標(biāo)無向航跡的測向、精確的距離和速度估計;第五步,目標(biāo)航跡空間定位,即將精確參數(shù)估計后的目標(biāo)航跡由距離-多普勒坐標(biāo)系投影到地理坐標(biāo)系,估計其經(jīng)緯度坐標(biāo),完成目標(biāo)航跡定位(圖4)。
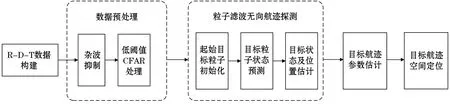
圖4 基于粒子濾波的地波雷達(dá)檢測與跟蹤聯(lián)合處理流程Fig.4 Integrated detection process of high frequency surface wave radar detection and tracking based on particle filter
在完成數(shù)據(jù)預(yù)處理并得到疑似面目標(biāo)后,記k時刻疑似面目標(biāo)集合為N k}。對集合內(nèi)的面目標(biāo)進(jìn)行分區(qū)處理,使得每一個分區(qū)對應(yīng)一個面目標(biāo),然后采用粒子濾波法實現(xiàn)對每一個疑似面目標(biāo)的無向航跡探測。在整個流程中,基于粒子濾波的無向航跡探測過程最為關(guān)鍵,這個過程又可細(xì)分為3步。
1)步驟1:起始目標(biāo)的粒子初始化。設(shè)k時刻某一面目標(biāo)狀態(tài)向量為X k=[r k,v k,a k,A k]T,其中r k,v k,a k和A k分別對應(yīng)k時刻該目標(biāo)的距離、速度、加速度和幅度四種狀態(tài)信息。在距離[Rmin,Rmax]、多普勒[Dmin,Dmax]的采樣范圍內(nèi)按照x n0~q b(x k)(x n0表示初始化過程中的第n個粒子狀態(tài),q b(·)表示采樣函數(shù))采樣N個粒子。
3)步驟3:目標(biāo)狀態(tài)估計。完成粒子的狀態(tài)轉(zhuǎn)移之后,結(jié)合地波雷達(dá)目標(biāo)觀測模型來構(gòu)造檢測似然比,計算粒子的權(quán)重,第k幀觀測數(shù)據(jù)的未歸一化粒子權(quán)重可用似然比函數(shù)近似表示為

式中,r和d分別為x k在測量數(shù)據(jù)中對應(yīng)的距離單元和多普勒單元坐標(biāo);C r(x k)={r-q,…,r-1,r,r+1,…,r+q},C d(x k)={d-p,…,d-1,d,d+1,…,d+p};p和q分別為受目標(biāo)點影響的距離單元和多普勒單元數(shù)目;A k(r,d)為目標(biāo)在(r,d)處的回波幅度;I0(·)為零階修正的貝塞爾函數(shù);z k(r,d)為第k幀目標(biāo)在(r,d)處的量測;δ為粒子權(quán)重。
比較由式(3)得到的粒子權(quán)重與所設(shè)置閾值η,當(dāng)粒子權(quán)重大于設(shè)置的閾值時,則判斷目標(biāo)存在,然后對所有粒子進(jìn)行系統(tǒng)重采樣,并依據(jù)估計目標(biāo)狀態(tài)。若連續(xù)3幀該目標(biāo)的粒子權(quán)重均小于設(shè)置的閾值η,則判斷目標(biāo)消失,終止航跡跟蹤。重復(fù)步驟2和步驟3,對所有目標(biāo)進(jìn)行檢測與跟蹤處理,得到目標(biāo)無向航跡集合。
1.3 粒子數(shù)自適應(yīng)確定
理論上,當(dāng)采樣的粒子個數(shù)N k足夠大的時候,粒子的分布函數(shù)就可以表示目標(biāo)的真實后驗概率密度,表示為

式中,P p(x k|z k)表示采樣的N k個粒子集合的概率密度,P r(x k|z k)表示k時刻目標(biāo)的真實后驗概率密度。
一般情況下,地波雷達(dá)回波信號中背景噪聲復(fù)雜、目標(biāo)信噪比強(qiáng)弱差別較大。對于背景噪聲相對均勻且目標(biāo)信噪比高的情況,只需要少量的粒子就可以滿足系統(tǒng)的跟蹤需求;對于復(fù)雜的背景環(huán)境,目標(biāo)信噪比較低,為了保證跟蹤精度,通常需要的粒子數(shù)目較大,而粒子濾波算法的復(fù)雜度與采樣的粒子個數(shù)成正比。顯然,采用固定個數(shù)的粒子不符合實際需求,因此,需要根據(jù)目標(biāo)所處環(huán)境對粒子個數(shù)進(jìn)行自適應(yīng)選取。由于雷達(dá)目標(biāo)存在地波展寬現(xiàn)象,其面目標(biāo)的粒子權(quán)重大小反映粒子擬合目標(biāo)真實狀態(tài)程度的高低,因此,通過設(shè)置固定的粒子權(quán)重之和進(jìn)行粒子自適應(yīng)的選取。除此之外,還需確定粒子的最大數(shù)目和最小數(shù)目。由于在目標(biāo)消失或者目標(biāo)信噪比過低的情況下,粒子權(quán)重之和需要大量的粒子才能達(dá)到設(shè)定的閾值,所以,設(shè)置最大粒子數(shù)目Nmax以避免大量無效計算,設(shè)置粒子個數(shù)下限Nmin以防止由于信噪比過高導(dǎo)致自適應(yīng)選取后的粒子多樣性損失嚴(yán)重,造成目標(biāo)跟蹤性能惡化或者丟失等情況。自適應(yīng)粒子濾波步驟為4步。
1)步驟1:粒子初始化。初始化粒子跟蹤參數(shù)n i=0,S i=0;其中n i表示k時刻第i個目標(biāo)的粒子數(shù),S i表示k時刻第i個目標(biāo)對應(yīng)的粒子權(quán)重之和。按照起始目標(biāo)的先驗信息,對目標(biāo)進(jìn)行采樣,并更新采樣的粒子數(shù)目。
3)步驟3:粒子自適應(yīng)選取。當(dāng)粒子個數(shù)小于Nmin或者當(dāng)粒子個數(shù)大于Nmin且小于Nmax但粒子權(quán)重和S i小于設(shè)定的閾值η時,即滿足公式N<Nmin或(Nmin<N<Nmax且S i<η),需要繼續(xù)采樣粒子;其他情況下,均停止采樣。
3 實測數(shù)據(jù)驗證
采用2015年1月在渤、黃海海域開展的地波雷達(dá)目標(biāo)探測實驗數(shù)據(jù),驗證本文提出的基于自適應(yīng)粒子濾波的地波雷達(dá)目標(biāo)檢測與跟蹤聯(lián)合處理方法。雷達(dá)工作中心頻率為4.7 MHz,距離分辨率為2.5 km,接收陣元數(shù)為8個,相干積累時間為262.144 s。其中選用60幀RD譜來構(gòu)建R-D-T數(shù)據(jù),相鄰兩幀之間的時間間隔為60 s。為了驗證本文算法的目標(biāo)跟蹤效果,采用船舶自動識別系統(tǒng)(Automatic Identification System,AIS)航跡數(shù)據(jù)作為目標(biāo)真實航跡。
應(yīng)用基于粒子濾波的檢測與跟蹤聯(lián)合處理方法得到航跡跟蹤結(jié)果,其三維空間分布(圖6),基本符合船只目標(biāo)的運動規(guī)律。為進(jìn)一步分析將其投影到地理坐標(biāo)系并與AIS結(jié)果進(jìn)行比對,結(jié)果如圖7所示。可以看出,PF-TBD算法跟蹤得到的航跡結(jié)果與AIS航跡結(jié)果在經(jīng)緯度上的分布基本一致,結(jié)果匹配較好。
為詳細(xì)比對分析探測結(jié)果,分別采用粒子濾波方法和動態(tài)規(guī)劃方法進(jìn)行了目標(biāo)檢測與跟蹤聯(lián)合處理(圖8和圖9)。由圖8和圖9可知,PF-TBD算法和DP-TBD算法的跟蹤結(jié)果顯示其徑向距離和速度誤差分布相差較大。其中PF-TBD算法得到的航跡與AIS航跡誤差較小,徑向距離誤差小于1 km,徑向速度誤差小于0.5 km/h,均在地波雷達(dá)系統(tǒng)目標(biāo)探測允許的誤差范圍之內(nèi);而DP-TBD得到的航跡中,其中在前5 min與AIS的徑向距離誤差大于5 km,徑向速度誤差在前3 min也大于1 km/h,均超出了地波雷達(dá)系統(tǒng)目標(biāo)探測精度。因此,依據(jù)DP-TBD算法得到的結(jié)果,可判斷出與同步AIS均在較大誤差的航跡為虛假航跡,而在判別與剔除虛假航跡方面,PF-TBD算法的結(jié)果優(yōu)于DP-TBD算法。
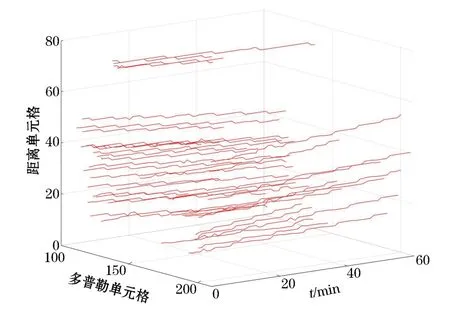
圖6 無向航跡跟蹤結(jié)果三維顯示Fig.6 Three-dimensional display of undirected track tracking results
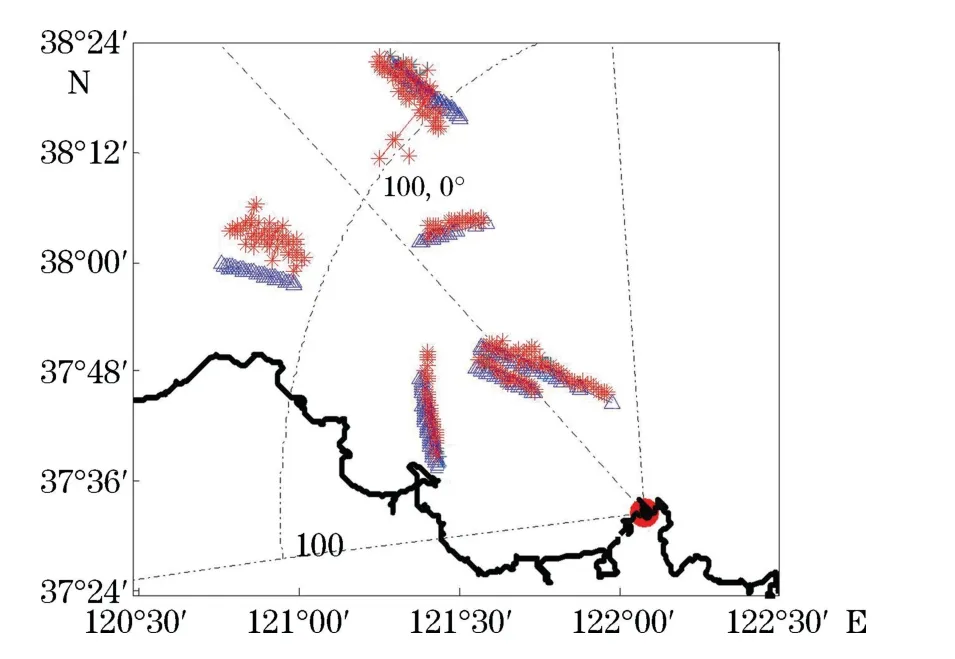
圖7 地理坐標(biāo)系下航跡跟蹤結(jié)果Fig.7 Tracking results in the geographic coordinate system
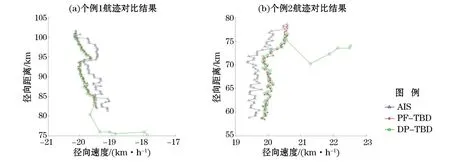
圖8 個例1和個例23種航跡對比結(jié)果Fig.8 Comparison results of three tracks in two cases
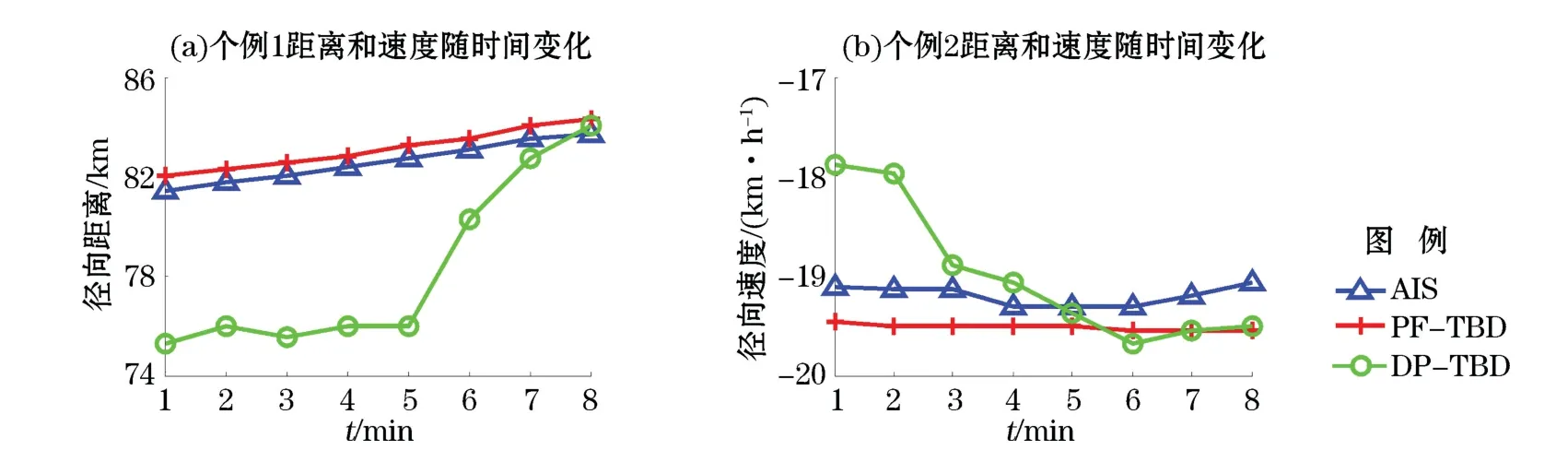
圖9 距離和速度分別隨時間變化Fig.9 Distance and speed change over time
為了驗證結(jié)果的可靠性,本文分析了個例1和個例2前7個時刻2種方法得到的目標(biāo)航跡以及同步AIS航跡的距離和速度隨時間變化的分布圖(圖9)。由圖9a可知,從第5分鐘到第6分鐘,DP-TBD算法得到的目標(biāo)航跡中距離變化量為4 km,這與根據(jù)s=vt計算得出的0.32 km的距離變化量明顯不符,因此可判斷這個結(jié)果屬于錯誤的虛假航跡關(guān)聯(lián)結(jié)果。之所以出現(xiàn)這樣的現(xiàn)象,原因在于DP-TBD算法是通過設(shè)定搜索范圍來尋找搜索范圍內(nèi)回波信號強(qiáng)度最大的位置,由于前5 min內(nèi)的信噪比低(3~5 dB),直接導(dǎo)致DPTBD算法中出現(xiàn)了錯誤的關(guān)聯(lián)結(jié)果;而PF-TBD算法是根據(jù)粒子運動狀態(tài)轉(zhuǎn)移方程來預(yù)測目標(biāo)下一步的位置和狀態(tài),對于不符合目標(biāo)運動規(guī)律的噪聲點無法通過時間累積能量來形成虛假的目標(biāo)航跡。因此,PFTBD算法可以在跟蹤階段有效剔除虛假航跡。
自適應(yīng)粒子數(shù)PF-TBD和PF-TBD算法的跟蹤整體結(jié)果如圖10所示。從2種算法跟蹤得到的航跡與AIS真實航跡對比可以看到,自適應(yīng)粒子數(shù)PF-TBD算法與PF-TBD算法在大部分情況下跟蹤結(jié)果一致。但對于個別目標(biāo),自適應(yīng)粒子數(shù)PF-TBD算法優(yōu)于PF-TBD算法,為了驗證算法的可靠性,本文給出了目標(biāo)個例2種方法得到的目標(biāo)航跡以及同步AIS航跡的結(jié)果。
由圖11可以看出,自適應(yīng)粒子數(shù)PF-TBD跟蹤得到了標(biāo)號為5的航跡,而PF-TBD未跟蹤得到。統(tǒng)計該航跡各個時刻速度,計算得到該目標(biāo)的平均加速度大小為9.6 km/h2,最大加速度為12.9 km/h2。相對于其他速度變化較慢的船只目標(biāo),該船只的速度變化較快,而自適應(yīng)粒子數(shù)PF-TBD方法可通過自適應(yīng)增加粒子個數(shù),實現(xiàn)對速度變化較快的目標(biāo)航跡跟蹤。
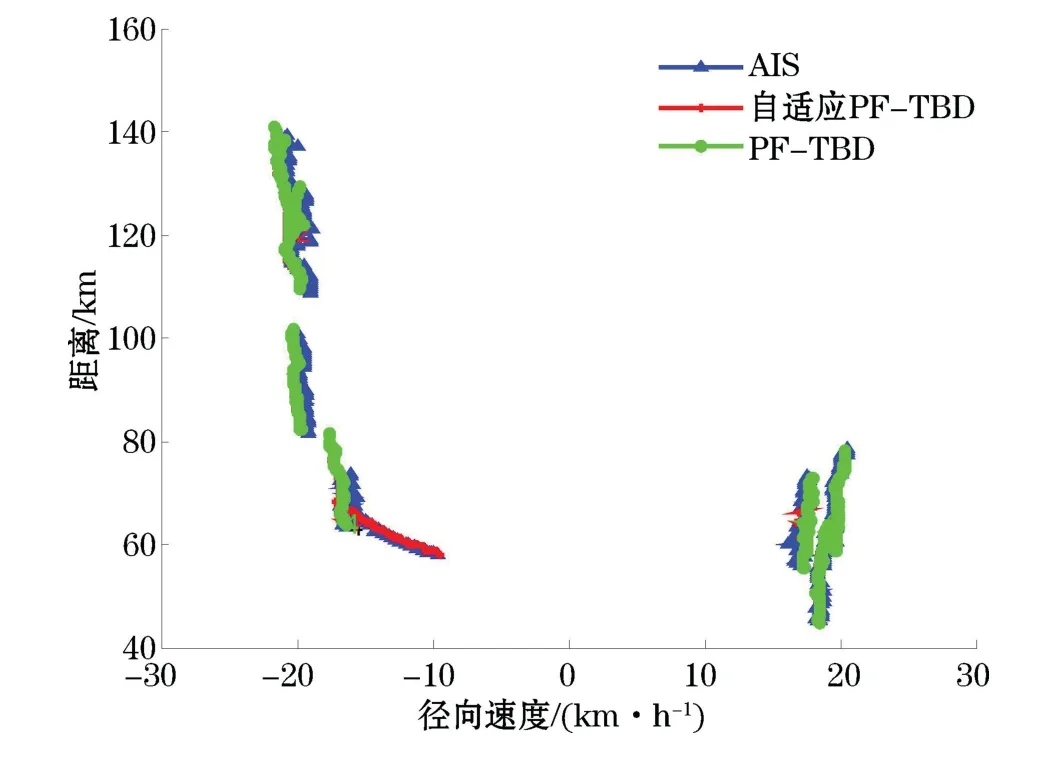
圖10 目標(biāo)AIS航跡與兩種算法跟蹤航跡整體結(jié)果Fig.10 Target AIS track and overall track tracking results of the two algorithms
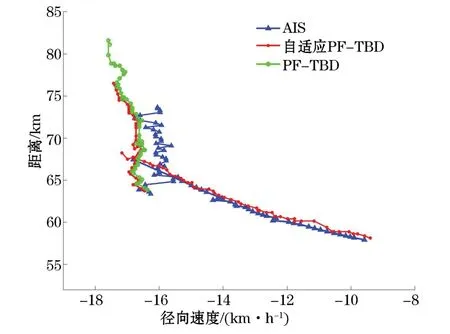
圖11 自適應(yīng)PF-TBD航跡與AIS航跡對比結(jié)果Fig.11 Comparison between adaptive PF-TBD track and AIS track
4 結(jié) 語
利用地波雷達(dá)回波譜數(shù)據(jù)中運動目標(biāo)的展寬特性,本文提出了基于自適應(yīng)粒子濾波的地波雷達(dá)目標(biāo)檢測與跟蹤聯(lián)合處理方法,用來解決固定粒子數(shù)濾波算法在復(fù)雜環(huán)境下對弱目標(biāo)跟蹤性能不佳的問題。首先在分析波雷達(dá)回波譜數(shù)據(jù)目標(biāo)特性基礎(chǔ)上,將粒子濾波法應(yīng)用于地波雷達(dá)目標(biāo)跟蹤,提出了基于粒子濾波的地波雷達(dá)目標(biāo)檢測與跟蹤聯(lián)合處理的方法;然后,基于目標(biāo)所處環(huán)境實現(xiàn)粒子個數(shù)的確定原則和步驟;最后利用2015年實測地波雷達(dá)目標(biāo)探測結(jié)果與同步AIS數(shù)據(jù)來檢驗方法的有效性,開展了目標(biāo)檢測與跟蹤聯(lián)合處理方法和動態(tài)規(guī)劃方法結(jié)果的比較分析。結(jié)果表明:本文提出的自適應(yīng)粒子濾波的地波雷達(dá)目標(biāo)檢測與跟蹤聯(lián)合處理方法可實現(xiàn)對速度變化較快的船只目標(biāo)的有效跟蹤,并可排除因某些噪聲造成的虛假航跡,整體上提高地波雷達(dá)目標(biāo)航跡跟蹤性能。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12