基于RTK和P P K技術的無人機航空攝影測量精度分析
2021-02-15 07:53:12劉洪飛賈偉潔
經緯天地 2021年6期
余 力 王 晨 劉洪飛 賈偉潔
(1.河南省資源環境調查一院,河南 鄭州 450000;2.河南省自然資源監測院,河南 鄭州 450000;3.河南測繪職業學院,河南 鄭州 450000;4.中國自然資源航空物探遙感中心,北京 100083)
0.引言
近年來,無人機航空攝影測量技術由于造價低、效率高、效益好等優勢被廣泛應用于多種測繪地理信息項目,極大地減輕了測繪工作者的外業工作量和強度,獲得的測量成果精度也能滿足大比例尺測圖對于精度的要求。但是,由于地形、測量環境等的限制,有的測量區域(如,高山、河流、危險等)在進行無人機航空攝影測量時,像控點布設的數量少或者像控點布設得不均勻,不能滿足要求,這樣會直接導致測量成果的精度降低。如果不能很好地解決此問題,則無人機航空攝影測量的應用將大打折扣。
RTK(Real-time kinematic)技術是一種基于全球導航衛星系統(Global Navigation Satellite System,GNSS)的實時定位技術,而PPK(Post Processed Kinematic)技術是一種基于GNSS的動態后處理定位技術,這兩種測量技術近年來發展比較迅速,在常規測量作業中發揮著重要作用,顯著地提高了測繪作業效率。如果在無人機作業中引進RTK和PPK技術,則能很好地解決因像控點布設數量少或者分布不均勻等導致的測量精度低的問題[1-5]。
1.兩種不同的無人機航空攝影測量模式
無人機攝影測量平臺無論是搭載RTK測量設備還是搭載PPK測量設備,都是通過不同的測量模式來獲取攝站的實時坐標,作為區域網平差中的附加非航空攝影測量觀測值,以空中控制取代地面控制的方法進行區域網平差,進而獲得地面點的三維坐標。其根本上都是利用了GPS輔助空中三角測量的基本原理[2-4]。
1.1 基于RTK技術的無人機航空攝影測量
RTK測量技術的基本工作原理是將一臺GNSS接收機置于基準站上,基準站和流動站同時同步接收衛星發射的信號,基準站所獲得的觀測值結合已知位置信息得到差分改正值,然后基準站將這個改正值通過數據鏈傳遞給移動站,從而使移動站獲得較準確的實時位置信息。
基于RTK的無人機航空攝影測量是在無人機平臺上搭載基于RTK模式的定位設備,將無人機視為流動站,在無人機航空攝影測量過程中實時獲得飛機的三維定位信息。目前,大多數基于RTK模式的無人機攝影測量都不直接布設基準站,而是直接利用連續運行參考站(Continuously Operating Reference Stations,CORS)信號獲得差分改正值,進而獲得飛機的三維定位信息,極大地提高了作業效率。
1.2 基于PPK技術的無人機航空攝影測量
PPK技術是利用進行同步觀測的一臺基準站接收機和至少一臺流動接收機對衛星的載波相位觀測量,并進行實時記錄,省掉中間無線電傳輸的環節。在測量完成之后,使用GPS處理軟件進行線性組合,形成虛擬的載波相位觀測量值,確定接收機之間厘米級的相對位置,然后進行坐標轉換,得到流動站在地方坐標系中的坐標。
PPK技術與RTK技術既有共同點也有各自的優缺點。共同點為:都具有全天候作業,作業效率高,自動化、集成化程度高等優點。RTK技術的優點是可以方便地利用CORS信號,作業過程中無須再架設基準站,數據處理相對簡單。缺點是在作業過程中差分信號通過數據鏈傳輸,受環境因素的影響較大;在作業過程中容易出現丟失差分信號的現象,尤其是在山區測量時作業距離受限嚴重。PPK技術的優點是可以在野外測量工作完成后進行事后差分處理,不需要實時數據通訊,無須考慮流動站能否接收到基準站播發的無線電信號等問題,作業半徑可以達到30km2以上。缺點是在作業過程中需單獨架設基準站,數據后處理過程相對復雜。在RTK技術受到限制的區域進行無人機航空攝影測量時可以利用PPK技術進行動態測量,觀測更為方便、自由,是對RTK技術的一種重要補充。
2.測量工程實例
為對比分析基于RTK和PPK兩種作業模式對無人機航空攝影測量中所獲得的成果的精度,作業人員分別使用了這兩種測量模式對兩個區域進行了無人機航空攝影測量。并利用PIX4D軟件對航空攝影測量數據進行了處理,最后利用地理信息軟件制作了1∶1000地形圖。測繪成果完成后,又利用GPS(RTK)作業模式結合全站儀極坐標采集法的方式采集了部分關鍵特征點的坐標數據(視其為觀測真值),對基于兩種不同作業模式的無人機航空攝影測量所獲得的成果數據進行了精度檢驗統計。特征點的采集遵循均勻分布、覆蓋全區的原則。精度評定采用平均誤差和中誤差兩個指標,中誤差采用式(1)進行計算。

其中,Δ為觀測值與真值的差值;n為參與統計的觀測值個數。
2.1 測區一
某高標準農田建設項目,測量現場為平原與丘陵過渡區,測區面積1.8km2,地勢平緩(高差約4m),像控點易于布設。本次無人機航空攝影測量共布設像控點8個,均勻覆蓋于測量區域(如圖1所示)。采用的無人機機型為大疆精靈4RTK,利用兩種作業模式分別進行了航飛,獲得了高質量的影像信息;并利用專業測繪地理信息軟件對航飛數據進行了處理,最終制作了1∶1000地形圖。測量成果完成后,利用GPS(RTK)作業模式結合全站儀極坐標采集法的方式采集了關鍵特征點15個。

圖1 測區一范圍和像控點分布圖
經對比分析,兩種作業模式所獲得的成果精度統計(如表1、表2所示):
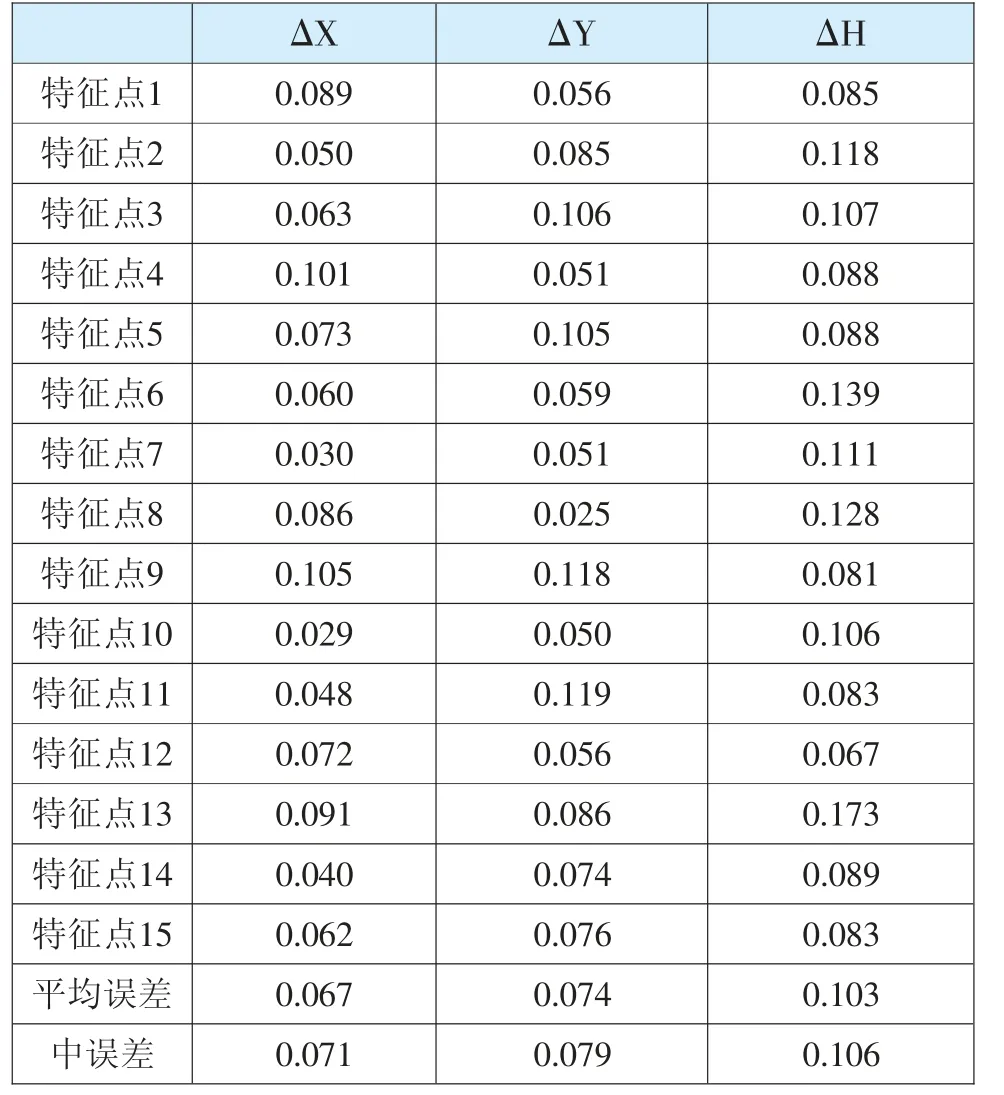
表1 精度統計表(測區一、RTK作業模式)單位:m
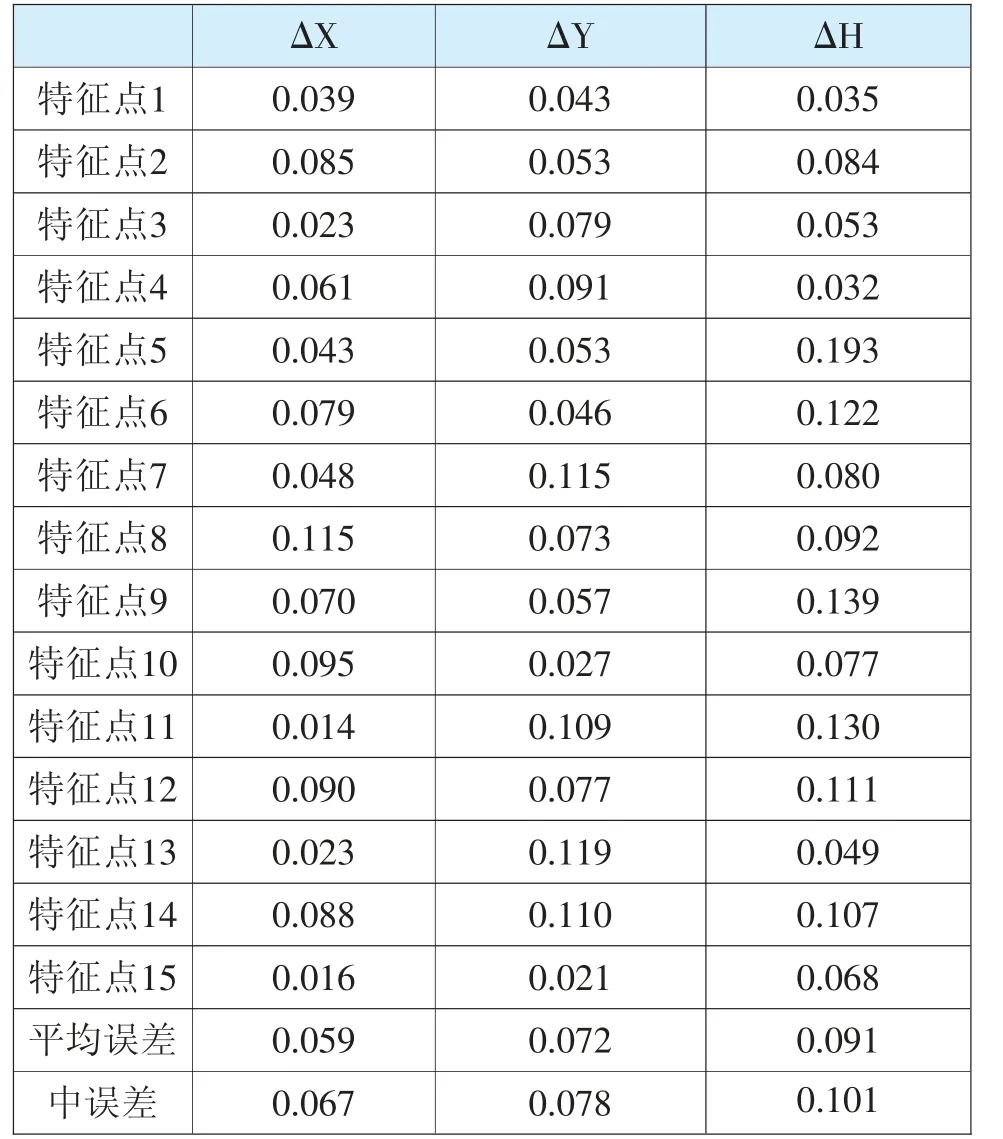
表2 精度統計表(測區一、PPK作業模式)單位:m
由表1、表2精度統計結果可以看出:在無人機航空攝影測量中采用RTK作業模式,測區一中15個特征點在橫坐標、縱坐標和高程方向的平均誤差分別為0.067m、0.074m和0.103m,中誤差分別為0.071m、0.079m和0.106m。而在采用PPK作業模式下,平均誤差分別為0.059m、0.072m和0.091m,中誤差分別為0.067m、0.078m和0.101m。從統計的整體平均誤差和中誤差來看,采用兩種模式進行無人機航空攝影測量所獲得的測量數據精度基本相當,采用PPK作業模式獲得的測量數據比采用RTK作業模式獲得的數據精度稍高,基本上在一個數量級。
測區一由于地形相對平坦,便于布設像控點且像控點布設均勻,具備實時通訊條件,故基于兩種作業模式的無人機航空攝影測量獲得的測量成果精度均較高,均能滿足大比例尺地形圖(1∶1000)測繪的精度要求。
2.2 測區二
某礦山地質環境恢復治理項目,測量現場為礦產開采所形成的深溝陡坡,測區面積1.3km2,周邊山高坡陡(高差約300m),地形破碎。受地形限制,像控點布設比較困難,僅在谷底布設了2個像控點,像控點分布未均勻覆蓋整個測量區域(如圖2所示)。本次航空攝影測量采用的無人機機型為大疆精靈4RTK,利用兩種作業模式分別進行了航飛,獲得了高質量的影像信息;并利用專業測繪地理信息軟件對航飛數據進行了處理,最終制作了1∶1000地形圖。測量成果出來后,利用GPS(RTK)作業模式結合全站儀極坐標采集法的方式采集了關鍵特征點11個。
圖2 測區二范圍和像控點分布圖
經對比分析,兩種作業模式所獲得的成果精度統計(如表3、表4所示):
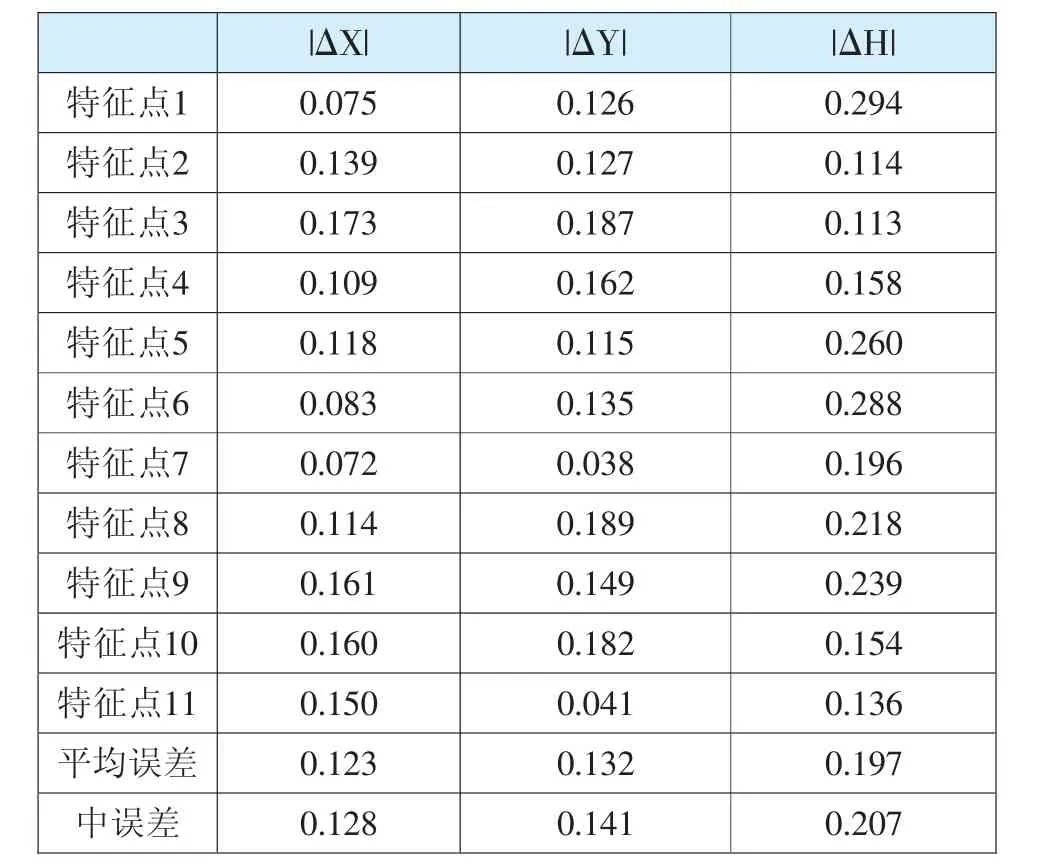
表3 精度統計表(測區二、RTK作業模式)單位:m

表4 精度統計表(測區二、PPK作業模式)單位:m
由表3、表4精度統計結果可以看出:在無人機航空攝影測量中采用RTK作業模式,測區二中11個特征點在橫坐標、縱坐標和高程方向的平均誤差分別為0.123m、0.132m和0.197m,中誤差分別為0.128m、0.141m和0.207m。而在采用PPK作業模式下,平均誤差分別為0.072m、0.082m和0.121m,中誤差分別為0.079m、0.086m和0.123m。兩者相比較,在無人航空攝影測量中采用PPK作業模式比采用RTK作業模式平均誤差分別減小了0.051m、0.050m和0.076m,中誤差分別減小了0.049m、0.055m和0.084m,測量精度得到明顯提高。盡管在某些特征點的部分方向上,基于RTK作業模式獲得的測量數據誤差更小,如特征點5和7的橫坐標方向、特征點7和11的縱坐標方向、特征點3的高程方向,但是,基于PPK技術獲得的測量數據所有方向的平均誤差和中誤差更小,明顯比基于RTK技術獲得的測量數據精度提高了5~8cm。
由測區二的測量實例可以明顯看到,在高差相對較大的山區進行無人機航空攝影測量,限于像控點難于布設、實時通訊條件差等因素,故采用PPK作業模式獲得的測量數據精度明顯高于采用RTK技術所獲得的。原因在于兩種差分技術的工作原理不同,PPK技術由于是后處理技術,不受實時通訊條件的限制,因此具有更好的適應性。
3.結束語
在無人機航空攝影測量中引入RTK技術和PPK技術均能極大地減少地面像控點的布設工作量,提高作業效率,獲得的成果精度較高,能滿足大比例尺地形圖測圖對于測量成果的精度要求。
基于數據通訊鏈以及數據處理方面的優勢,PPK技術能更好地適用于無人機航空攝影測量作業,尤其是在像控點難以布設、實時通訊受限的地區。本文實驗結果表明:基于PPK技術的無人機航空攝影測量可以有效地保證測量精度,其測量成果精度明顯高于基于RTK技術的無人機航空攝影測量獲得的成果,具有較廣闊的應用前景。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
