無人機海上溢油跟蹤監測系統設計及仿真
2021-02-16 08:33:06覃睿閆玲陳子健
海洋通報 2021年6期
覃睿,閆玲,陳子健
(中國民航大學 交通科學與工程學院,天津 300300)
環境監測是可持續發展的關鍵,目標環境屬性在時間和空間上是可變的。環境監測一般包括現場調查、樣品采集、分析測試、數據處理和綜合評價等(吳季友等,2020)。隨著目標環境監測范圍不斷擴大,勞動強度明顯增加。時間和空間的變化也要求監測的方法必須足夠有效,以便能夠即時了解環境狀況。無人機作為現代科技產物,可通過搭載各類傳感器和測量設備,在惡劣的自然條件下精確監測環境變化,如監測森林火災、地震、放射性廢物以及海洋內部和表面各種類型的污染等(Cook,2007;Casbeer et al,2006;Dunbabin,2012)。在面對如實時監測海上溢油等監測區域較大的情況時,近年來普遍采用高空衛星監測與低空航空監測相結合的手段(李歡等,2017)。利用星載合成孔徑雷達(SAR)遙感對海洋進行大范圍溢油監測,之后利用低空航空監測檢驗遙感監測結果并對溢油區域進行進一步詳細監測,提供實時信息(孫健等,2014;史一凡等,2014)。
無人機在現代監測中憑借部署快、成本低的特點已成為未來低空航空溢油監測的方向。張婷等(2018)研究了紫外與SAR 技術集成于無人機聯合用于溢油探測的方法;曲小同等(2019)建立了海上無人機溢油監測巡航優化模型,利用改進蟻群算法求解;任廣波等(2019)以無人機高光譜遙感為手段,研究了海面溢油檢測方法。但上述無人機溢油監測手段都僅使用了單架無人機,對于小范圍環境監測問題,使用單個無人機應該足夠,然而,當監測溢油漂移和擴散時,無人機搜索和監控的環境區域不斷擴展,單個無人機可能產生以下限制:缺乏全局信息,導致監測過程易受傳感器信息誤報、環境信息變化等因素的影響,導致決策不周、探測效率低下;由于環境信息有限,單個無人機可能會陷入局部極值,導致誤判;一旦單個無人機失效,任務將無法完成(Huang et al,2020)。使用一定數量的簡單、便宜的無人機系統比使用單一的復雜、昂貴的無人機成本更低,且使用多個無人機不僅可以通過降低故障概率增加系統的魯棒性,還可以在時空變化的情況下,對環境進行多重采樣提高測量的準確性。
由于使用多個無人機進行溢油監測會增加系統的復雜性,因此如今大多數多智能體的研究主要集中在智能體集群編隊和協調個體之間的距離等方面,其主要目標是實現編隊控制目標、避免碰撞和向預期目標收斂(Liu et al,2021)。通常希望智能體之間形成固定或期望的距離,以避過障礙物。當智能體的運動需要跟隨監測溢油而具有靈活性時,現有的方法會存在一定限制。溢油在海上的漂移擴散是一個監測范圍不斷擴展的時空變化問題,需要無人機群具有靈活性,故本文提出多無人機系統的柔化編隊協議,該協議在多智能體執行任務時具有靈活性。在此系統下,整個系統的狀態都取決于環境和主體間的相互作用。同時,該協議也可廣泛應用于無人機群對不同尺度的時空環境現象進行跟蹤和監測。
1 無人機監測海上溢油場景總體架構
1.1 總體方法概述
本文的主要假設包括無人機可以使用GPS 或GLONASS 等定位設備實現自主定位,使用GPRS數據網絡等進行通信,同時能夠攜帶設備,進行溢油污染采樣,測量海上溢油污染的濃度。因此,本文假設利用高空衛星獲取SAR 圖像確定溢油大致位置后(李穎等,2017),無人機能夠到達預定位置,測量溢油污染的濃度,并在網絡中彼此分享污染物濃度信息和位置信息。一旦計算出新的位置,無人機可在單位時間內到達該位置。集群中的每架無人機都可看作一個具有智能行為的智能體,每個智能體一般只需處理與自身相關的局部信息,進行自主活動,但同時又具有合作的能力。針對任務目標,集群中的各無人機可動態地規劃各自的運動序列,采用分布式控制,而不是集中規劃。
考慮無人機集群中包含n 個無人機智能體ai,i沂(1,2,…,n),在海上的位置確定為Pi=(xi,yi),集群的中心位置為P0=(x0,y0),是各智能體位置的平均值,中心點O 即為后續坐標系統的原點。

無人機在系統中的控制輸入為F:

其中,Fz為無人機控制器輸出的分量,由跟蹤控制器生成;F漬為無人機控制輸出的另一分量,由人工勢場法得到。
1.2 無人機群監測系統架構
圖1 顯示了無人機之間,無人機群與海上溢油環境之間以及無人機群與地面控制中心間的相互作用。集群中的無人機根據位置傳感器和污染傳感器測量的海上溢油濃度變化和網絡中其他無人機的位置進行不斷的迭代調整,并通過基站將溢油信息傳送至地面控制中心,以便決策者做出下一步行動計劃。過程中需要計算單個無人機的下一個目的地,然后移動至此。無人機集群的形成取決于溢油隨時間變化的污染形態分布。因此,基于無人機污染傳感器測量的數值,采用模糊PID 控制器進行處理,產生分量Fz。另一方面,利用人工勢場法保持多智能體分布的一致性,避免碰撞。

圖1 無人機群溢油監測系統架構
基于多智能體系統的無人機集群邏輯結構模型(梁曉龍等,2018)如圖2 所示,圖中的傳感器包括污染傳感器和定位傳感器,如圖3 所示。污染傳感器負責測量污染濃度并記錄在信息處理器中,將記錄的污染信息輸入無人機跟蹤控制器,生成無人機控制輸出的分量Fz。同時,定位傳感器獲得位置信息,通過網絡與其他無人機共享,并從網絡中接收其他無人機的位置信息,利用人工勢場法生成無人機控制輸出的分量F漬,以保證無人機之間的安全間隔。最后,結合控制模塊的結果,驅動無人機的發動機或推進器將其移動到所期望的目的地。這個算法不斷循環,使得整個集群對污染的變化不斷做出反應。事實上,整個系統的形成取決于環境和主體間的相互作用。同時,該算法也適用于使用無人機群對不同時空尺度的其他環境現象,如藻類和放射性廢棄物等進行跟蹤和監測。

圖2 無人機集群邏輯結構圖

圖3 單個無人機工作流程結構圖
2 海上溢油模型
現有的溢油模型理論將海上溢油過程大體分為四個階段:溢油擴散、溢油漂移、溢油蒸發和溢油乳化(鄒長軍等,2017)。本文中無人機跟蹤監測的重點為前兩階段。為驗證本文對無人機控制器設計算法的可靠性和真實性,利用溢油的數值模型對提出方法的性能進行模擬和評價。在數值仿真中,溢油的漂移和擴散過程必須符合溢油運動的基礎理論。
2.1 溢油擴散模型
由于溢油在海上的擴散過程具有隨機性,可用蒙特卡羅方法進行描述。蒙特卡羅方法(Monte Carlo Method),又名統計模擬方法,是20 世紀40年代中期因科學技術和電子計算機的發展,而被提出的一種以概率統計理論為指導的數值計算方法(裴鹿成等,1980)。求解溢油擴散問題時,利用擴散現象的隨機性,通過給定時間尺度、湍流強度和隨機粒子數,以求得粒子的擴散。擴散所用的隨機數由正規隨機數方法產生(婁安剛等,2000)。

n 個粒子在t=0 時,設x=y=z =0;在t=t0時,進入網格內粒子的個數可換算為溢油濃度L。這樣計算出的溢油濃度在粒子數較少時可能會出現錯誤,需作適當的平滑。例如,將周圍的9 個格子中的粒子數進行平均,再計算溢油濃度,即可抑制分布不規則的極端值。
溢油面積可根據Fay(1971)的海上溢油模型進行計算,溢油面積A 為:

其中,Ks為待定系數,滓為凈表面張力,V 為溢油體積,D 為石油表面活化劑的擴展系數,籽為溢油密度,S 為油的溶解度。
由于上式中的Ks、S 和D 難以確定,所以一般的計算中使用經驗公式計算海上溢油的最終溢油面積:

2.2 溢油漂移模型
海上發生溢油事故時,油膜除了發生擴散運動外,還會在海面風應力的推動作用和海流的攜帶作用下發生漂移運動。油膜的漂移涉及的因素很多,較為復雜,截至目前尚無較為理想的數學模型。鑒于此,以下采用Webb 等(1970)建立的基于專家經驗的經典海軍模型漂移方程,在該模型下,設油膜的漂移速度為,則:

其中,Vt為海流速度矢量;Vw為海上風速矢量;Kw為海流漂流系數,常選取0.035。
經過駐t 時間后,油膜的中心位置O 為:

將(6),(7)合并,得:

3 無人機控制跟蹤系統
3.1 無人機控制跟蹤器
PID(Proportion Integral Differential)控制是控制系統中較為成熟且應用最為廣泛的控制器(Chen,2012),無人機溢油跟蹤監測系統應用PID控制器的目的是希望根據溢油漂移及擴散狀況,利用控制器輸出的力Fz作用于無人機,使無人機從當前位置運動到溢油邊界的目標位置。其表達式為:

將上式離散化,得:

其中,e(k)為現在位置與目標位置之間的偏差;Kp,Ki,Kd分別表示比例、積分和微分增益。
考慮到無人機不能直接檢測到溢油邊界點,所以采取一種有效的措施,設置二進制污染濃度傳感器,允許無人機越過溢油邊界曲線:

其中,Si為在i 點二進制污染傳感器讀取數值,L0為污染傳感器可識別濃度的最小值,Li為i 點的實際污染濃度。在Si(t)=1,Si(t+1)=0 或者Si(t)=0,Si(t+1)=1 時,可以看作無人機穿過溢油邊界。上述兩種情況都含有污染濃度的階躍變化,由于無人機在尋找到目標點之前處于勻速運動狀態,因此i(t)和i(t+1)兩個相鄰采樣點之間的中點R 為污染邊界點,即無人機目標位置:

為避免通過大量的實驗調節PID 參數,縮短調節時間,引入模糊PID 控制。模糊PID 控制是在上述PID 算法的基礎上,為提高控制器效率和魯棒性而采用的方法(Gomez et al,2011)。在模糊PID 控制器中輸入位置誤差和誤差變化率,運用模糊控制理論,將專家調節的知識庫轉化為模糊推理機制,利用模糊規則實現對PID 參數的整定。根據輸入量e(k)和ec的不同組合,對應不同Kp、Ki、Kd的控制規則,使輸入變量在不同階段達到較好的控制效果(毛赫等,2018)。Kp、Ki、Kd有49種模糊規則,可通過Matlab 中的模糊規則編輯器編輯,并對其進行模糊推理和解模糊,得出模糊修正值Kp、Ki和Kd,完成對PID 參數的整定。Kp、Ki、Kd整定后的值為:

其中,Kp的作用是在偏差產生時,控制器可立刻進行控制,減少穩態誤差。Ki用于消除震蕩,提高控制精度。Kd可以改善動態特性,縮短調節時間。
3.2 人工勢場法
本文希望將無人機集群的個體按均勻分布的方式排列,以獲取更大的分布面積,因此采用人工勢場法(曲成剛 等,2014)。以三個無人機i,j,k為例,假設各無人機具有相似極性的相同電荷,它們會互相排斥,但僅局限于在集群中心的垂直方向,每個智能體與集群中心的距離由跟蹤控制器控制。每個智能體在人工勢場中形成的力可確定方程中的F漬。根據庫侖定律,其中qi和qj代表粒子i 和j 的電荷,且k抑9 伊109,它們之間的排斥力為:

智能體i 受到j 的力的垂直分量為:

根據正弦性質可得:
結合上式得:

k 對i 的斥力與j 相同,因此,i 受到合力的垂直分量為:

其中,K 為正增益系數,j沂[1,n],且j屹i ,n =N+,dij、lj、著i、著j 的示意圖如圖4 所示。

圖4 無人機人工勢場法受力示意圖
使用人工勢場法可使每個智能體都能自動找到合適的位置和平衡點,使系統在執行任務期間保持魯棒性。
4 模擬仿真
模擬仿真的目的是基于以上所提出的方法,利用Matlab 軟件評估無人機擬合變形油膜輪廓的性能。本文選取菲律賓東海岸及太平洋靜風條件下的數據進行仿真,洋流數據來自國家海洋科學數據中心在線數據庫(http://mds.nmdis.org.cn/),表1 為2017 年4 月15—24 日共10 天西北太平洋海域(125毅E—140毅E、15毅S—25毅N) 的海流速度與海流方向數據。

表1 西北太平洋海域海流速度與方向(2017.4.15—2017.4.24)
4.1 溢油漂移擴散仿真
首先模擬海上溢油,在模擬每次迭代的浮油之后,虛擬無人機將搜索和跟蹤計算機生成的溢油。本文算法面向的主要環境是沿海地區和海洋,水平尺度遠遠大于垂直尺度,故運用Matlab 生成二維模型進行簡化處理。其中,前文公式中擴散系數Kx=2 伊105cm2/s,Ky=2 伊105cm2/s,網格間隔設為駐x=50 m,駐y=50 m,時間駐t=60 s(婁安剛等,2000)。根據公式,假設溢油量為10 t,在靜風條件下,海上風速為0耀0.2 m/s,本文取海上風速為0,根據上表數據得出平均海流速度約為0.15 m/s,平均流向為88.62毅,在5耀20 h 內溢油仿真的結果如下圖5—圖8 所示,圖中的油粒子代表了溢油擴散范圍,圖側的色標表示溢油的濃度(單位為mg/L)。由圖可知,油膜隨時間的變化而不斷漂移和擴散,濃度也隨時間在不斷變化。

圖5 溢油漂移擴散5 h 后的位置

圖6 溢油漂移擴散10 h 后的位置

圖7 溢油漂移擴散15 h 后的位置

圖8 溢油漂移擴散20 h 后的位置
4.2 無人機跟蹤仿真
在模擬每次迭代的浮油之后,虛擬無人機將搜索和跟蹤計算機生成的溢油。設計出的無人機群跟蹤系統將模糊PID 控制器與人工勢場法相結合,控制無人機到達溢油邊界且互相存在安全間隔。本文仿真了10 架無人機跟蹤監測溢油的場景,如圖9—圖12 所示,連接無人機的虛線代表無人機編隊的輪廓線,其目的是擬合海上溢油邊界,這是通過在無人機集群中心周圍位置進行三次樣條插值實現的。

圖9 無人機追蹤溢油漂移擴散5 h 的場景
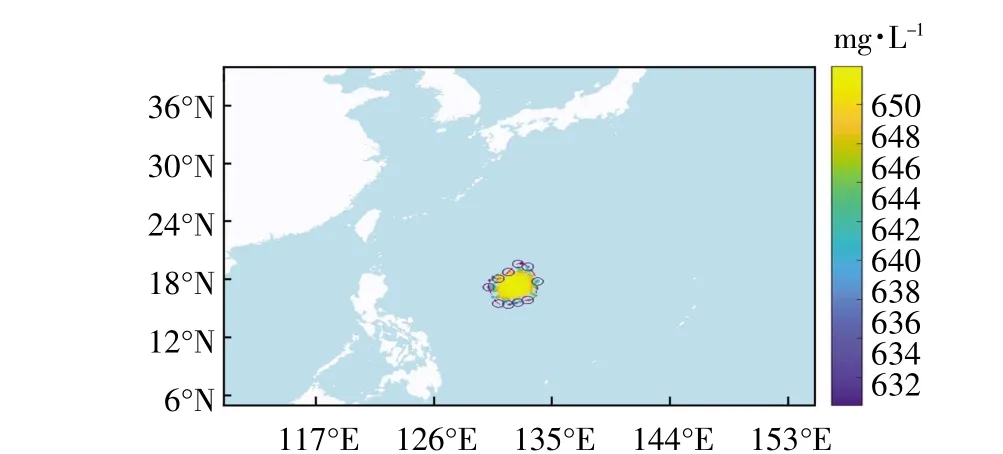
圖10 無人機追蹤溢油漂移擴散10 h 的場景
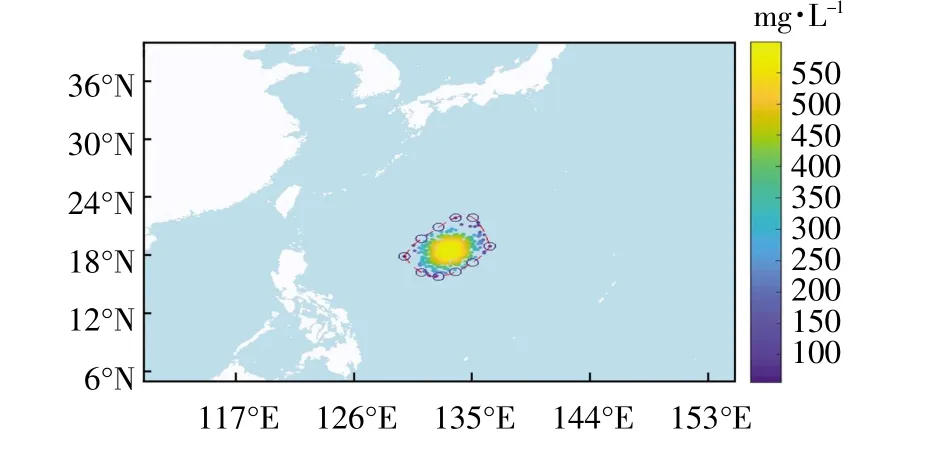
圖11 無人機追蹤溢油漂移擴散15 h 的場景

圖12 無人機追蹤溢油漂移擴散20 h 的場景
4.3 仿真結果與討論
無人機覆蓋的溢油區域的面積與實際溢油面積的重合率為:

其中,A 為溢油面積,B 為無人機覆蓋區域面積。
根據前文模擬仿真結果計算出無人機所覆蓋的面積與海上溢油面積及其在5耀20 min 時的重合率,繪制出折線圖,如圖13 和圖14 所示。由圖14 可知,本文設計的無人機跟蹤控制系統使無人機覆蓋面積與海上溢油的面積隨時間變化的重合率控制在70%以上,最高可達80%左右,且具有良好的穩定性。溢油進入海洋后,油膜面積不斷變大,油膜厚度變小,邊緣溢油濃度也逐漸變小。無人機通過測量溢油濃度確定溢油邊緣,故當溢油濃度降低,無人機群對溢油的覆蓋面積也有所降低,產生測量誤差。

圖13 溢油面積與無人機覆蓋面積

圖14 溢油面積與無人機覆蓋面積重合率
緣 結論
本文提出了一種針對溢油污染的自適應無人機群跟蹤方法。該方法依賴于周圍環境變化,更適合于監測和跟蹤隨時間變化的環境現象。本文首先建立了一個無人機跟蹤框架,將模糊PID 控制器與人工勢場法相結合,提高魯棒性。模糊PID 控制器使無人機群覆蓋了大部分溢油范圍,而人工勢場法保持了無人機集群的編隊。最后通過仿真驗證了該方法的有效性。
仿真結果表明,該方法對海上溢油污染監測的覆蓋率可以達到80%,能夠在溢油污染漂移和擴散的不同階段保持良好的跟蹤效果。本文在理論上具有可行性,但筆者僅仿真了無人機監測靜風條件下海上溢油的漂移和擴散,其他氣候條件下的覆蓋率還有待進一步研究;且仿真時采用了溢油模型模擬溢油的漂移和擴散而非真實的溢油狀況,與實際情況存在誤差,在實際應用方面還有待完善。未來,該方法應在大規模、復雜的海面環境上進行現場試驗和模擬,測試其適用性和魯棒性。
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:32
小學科學(學生版)(2020年6期)2020-08-13 07:47:12
表面工程與再制造(2019年6期)2019-08-24 06:40:04
當代陜西(2019年7期)2019-04-25 00:22:18
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
領導決策信息(2018年26期)2018-10-12 02:18:26
商周刊(2018年18期)2018-09-21 09:14:46