罐車爬壁射流清洗小車力學(xué)特性分析
2021-02-22 08:12:14吳志剛
機械制造 2021年2期
翁 雋 吳志剛
江蘇省特種設(shè)備安全監(jiān)督檢驗研究院南通分院 江蘇南通 226011
1 分析背景
罐體內(nèi)部清洗是罐車檢驗前必不可少的程序,傳統(tǒng)的人工清洗方式存在效率低、能耗高、污染大、勞動強度大等缺點,并且安全事故多。高壓水射流清洗技術(shù)作為一種高效環(huán)保的清洗手段,在國內(nèi)外已被廣泛關(guān)注,發(fā)展迅速[1-2]。
爬壁機器人是高壓水射流清洗設(shè)備的執(zhí)行機構(gòu),作為極限作業(yè)機器人的一個重要分支,在橋梁與隧道檢測、高層建筑清洗、反恐偵查等領(lǐng)域具有廣闊的應(yīng)用前景[3-5]。目前大部分爬壁射流機器人的研究主要集中于船舶除銹領(lǐng)域[6-7],多數(shù)船舶除銹爬壁機器人采用履帶行走[8],力學(xué)分析的傾角范圍在0°~90°之間,并不適用于在封閉罐體內(nèi)進行360°全方位行走的罐車爬壁射流清洗小車。
筆者建立罐車爬壁射流清洗小車的力學(xué)模型,對不同工況進行分析,為電磁鐵、電機、減速機的選型提供理論依據(jù)。
2 結(jié)構(gòu)與工作原理
爬壁射流清洗小車主要由車體、驅(qū)動機構(gòu)、俯仰曳引機構(gòu)、噴刷機構(gòu)、電磁吸附機構(gòu)等組成。驅(qū)動機構(gòu)采用四臺交流伺服電機提供動力,可以通過控制各個伺服電機的轉(zhuǎn)速和轉(zhuǎn)向來實現(xiàn)清洗小車加減速與轉(zhuǎn)向。清洗小車工作時,電磁吸附機構(gòu)中周向?qū)ΨQ安裝的四個電磁鐵為清洗小車提供足夠的磁吸附力,保障車體附壁行走。四臺伺服電機驅(qū)動清洗小車行走、攀爬和轉(zhuǎn)向,俯仰曳引機構(gòu)牽引清洗小車完成壁面轉(zhuǎn)換。噴嘴噴射出高壓水射流,水射流的反沖力為鋼絲刷旋轉(zhuǎn)提供動力,最終實現(xiàn)清洗小車在運動中邊沖邊刷的清洗作業(yè)。爬壁射流清洗小車結(jié)構(gòu)如圖1所示。
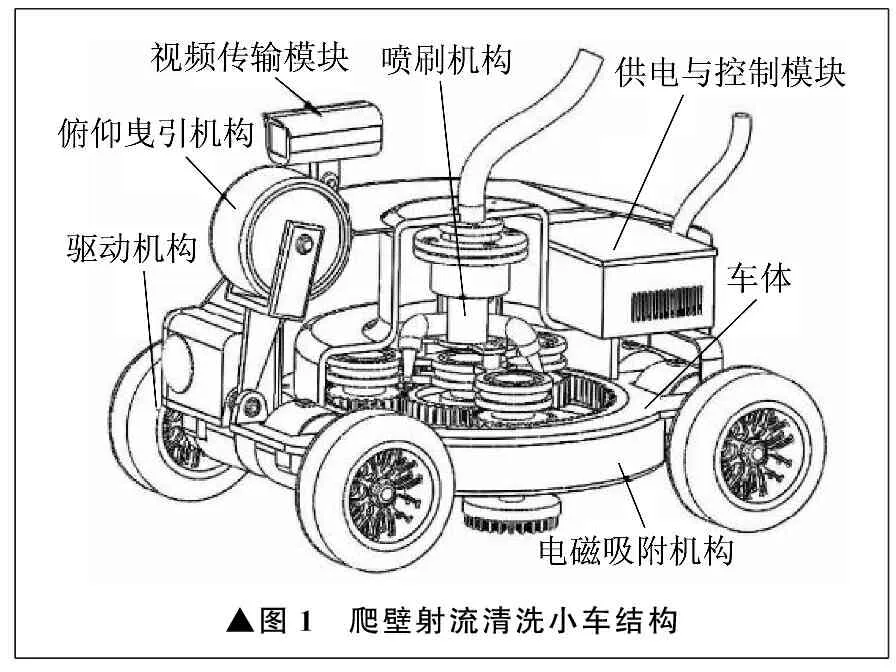
▲圖1 爬壁射流清洗小車結(jié)構(gòu)
3 靜力學(xué)分析
爬壁射流清洗小車在罐體壁面吸附時的縱向位姿靜力學(xué)模型如圖2所示,橫向位姿靜力學(xué)模型如圖3所示。圖2、圖3中,G為清洗小車重力,Fq為射流反沖力,Fci為單個電磁鐵的吸附力,Ns為壁面對鋼絲刷的支持力,fs為壁面對鋼絲刷的靜摩擦力,Ni為單個車輪所受的壁面支持力,fi為單個車輪所受的壁面靜摩擦力,θ為壁面傾角,L1為清洗小車質(zhì)心與壁面間的距離,L2為前后車輪間的距離,L3為清洗小車質(zhì)心與后車輪間的距離,L4為后磁鐵與后車輪間的距離,L5為前磁鐵與后車輪間的距離,L6為左右車輪間的距離,L7為清洗小車質(zhì)心與右車輪間的距離,L8為右磁鐵與右車輪間的距離,L9為左磁鐵與右車輪間的距離。
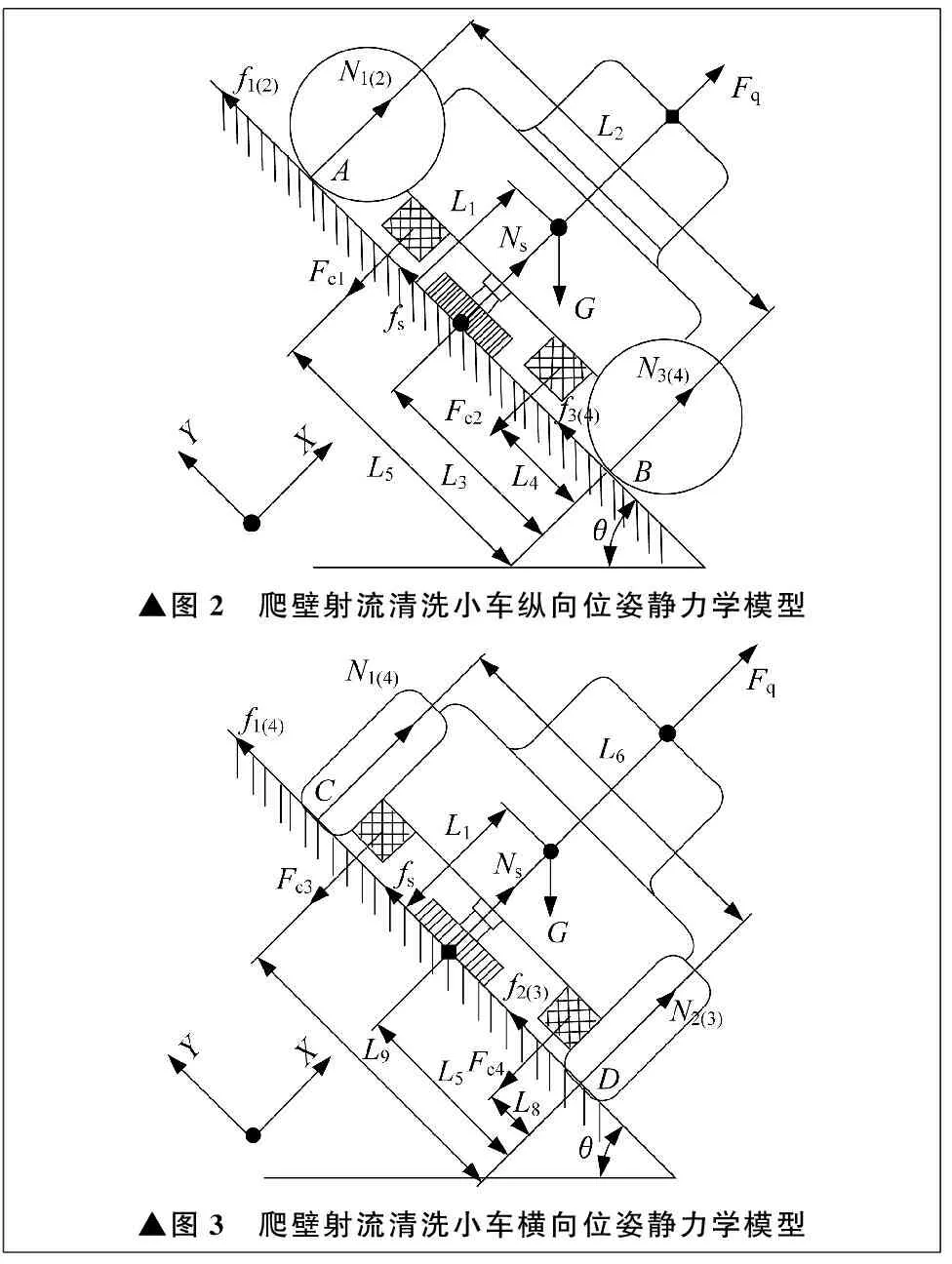
▲圖2 爬壁射流清洗小車縱向位姿靜力學(xué)模型▲圖3 爬壁射流清洗小車橫向位姿靜力學(xué)模型
3.1 沿壁面下滑
爬壁射流清洗小車吸附在罐體內(nèi)壁時,有沿壁面下滑的趨勢,需要車體與罐體內(nèi)壁接觸部分提供足夠大的靜摩擦力來防止清洗小車的相對滑移。
當(dāng)壁面傾角θ為0°~180°時,清洗小車縱向位姿可靠吸附的靜力平衡方程為:
(1)
(2)
為避免清洗小車沿壁面下滑,需滿足:
(3)
fi=μ1Ni
(4)
fs=μ2Ns
(5)
式中:μ1為壁面與車輪間的靜摩擦因數(shù),μ1=0.6;μ2為壁面與鋼刷間的靜摩擦因數(shù),μ2=0.3。
由于四個電磁鐵的規(guī)格型號相同,認為各自所產(chǎn)生的磁吸附力也相同,根據(jù)式(1)、式(2)、式(3),為保證清洗小車對罐體壁面無相對滑移,單個電磁鐵吸附力應(yīng)滿足:
(6)
同理,當(dāng)壁面傾角θ為180°~360°時,為保證清洗小車對罐體壁面無相對滑移,單個電磁鐵吸附力應(yīng)滿足:
(7)
3.2 縱向傾覆
爬壁射流清洗小車在壁面上縱向吸附時,可能會繞B點發(fā)生縱向傾覆脫落,為保證清洗小車不發(fā)生縱向傾覆,需要電磁吸附力來提供抗傾覆力矩。
當(dāng)壁面傾角θ為0°~180°時,清洗小車繞B點的力矩平衡方程為:
GL3cosθ+(Fc1+Fc2)L5+(Fc3+Fc4)L4
-(N1+N2)L2-GL1sinθ-N3L3-FqL3=0
(8)
為避免清洗小車繞B點發(fā)生縱向傾覆脫落,需要滿足:
N1>0
(9)
N2>0
(10)
可得單個電磁鐵吸附力應(yīng)滿足:
(11)
同理,當(dāng)壁面傾角θ為180°~360°時,為避免清洗小車繞A點發(fā)生縱向傾覆脫落,單個電磁鐵吸附力應(yīng)滿足:
(12)
3.3 橫向翻轉(zhuǎn)
爬壁射流清洗小車在壁面上橫向吸附時,可能會繞D點發(fā)生橫向翻轉(zhuǎn)脫落,為保證清洗小車不發(fā)生橫向翻轉(zhuǎn),需要電磁吸附力來提供抗翻轉(zhuǎn)力矩。
當(dāng)壁面傾角θ為0°~180°時,清洗小車繞D點的力矩平衡方程為:
GL7cosθ+(Fc1+Fc4)L9+(Fc2+Fc3)L8
-(N1+N4)L2-GL1sinθ-NsL7-FqL7=0
(13)
為避免清洗小車繞D點發(fā)生橫向翻轉(zhuǎn)脫落,需要滿足:
N1≥0
(14)
N4≥0
(15)
可得單個電磁鐵吸附力應(yīng)滿足:
(16)
同理,當(dāng)壁面傾角θ為180°~360°時,為避免清洗小車繞C點發(fā)生橫向翻轉(zhuǎn)脫落,單個電磁鐵吸附力應(yīng)滿足:
(17)
3.4 數(shù)值模擬
將各計算參數(shù)代入式(6)、式(7)、式(11)、式(12)、式(16)、式(17),得到靜態(tài)最小吸附力模擬曲線,如圖4所示。
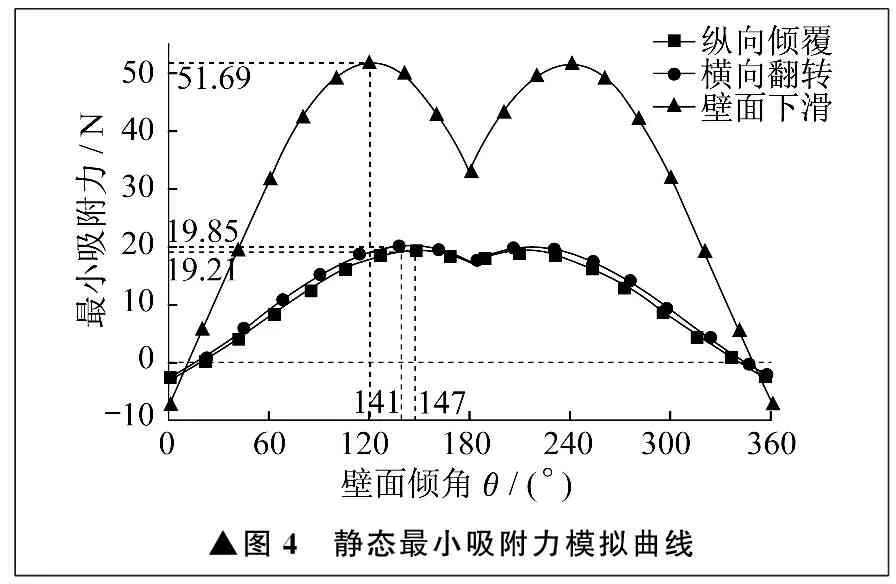
▲圖4 靜態(tài)最小吸附力模擬曲線
對于橫向翻轉(zhuǎn),最小吸附力峰值在壁面傾角為141°時得到,為19.85 N。對于縱向傾覆,最小吸附力峰值在壁面傾角為147°時得到,為19.21 N。對于壁面下滑,最小吸附力峰值在壁面傾角為120°時得到,約為51.69 N。對比發(fā)現(xiàn),防止清洗小車沿壁面下滑所需的最小吸附力遠大于其余兩種失穩(wěn)形式,因此清洗小車最容易發(fā)生的失穩(wěn)形式為沿壁面下滑。為防止沿壁面下滑失穩(wěn)形式的發(fā)生,每一個電磁鐵至少要能提供51.69 N的電磁吸附力。
4 動力學(xué)分析
4.1 直線行駛
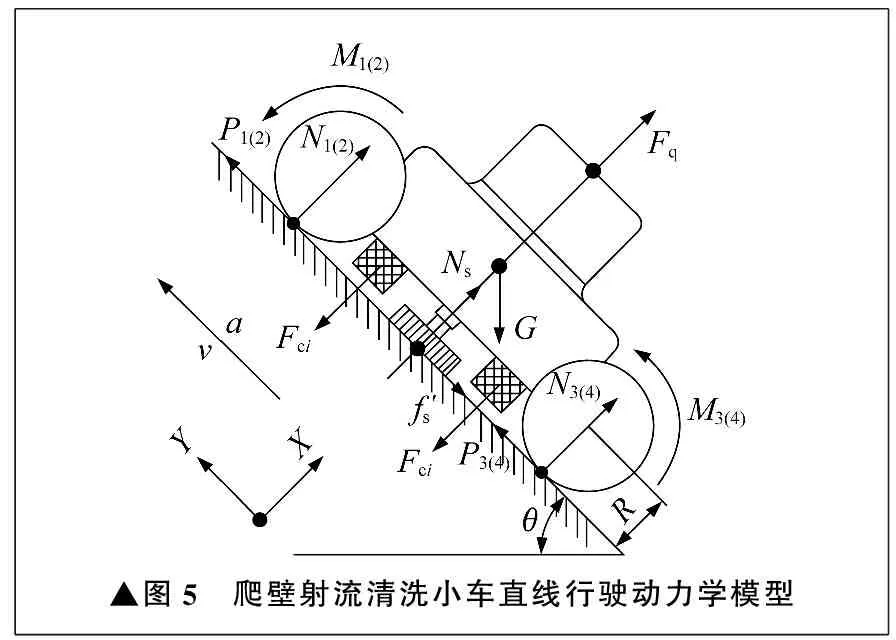
爬壁射流清洗小車在執(zhí)行單圈清洗時,直線行駛動力學(xué)模型如圖5所示。
(19)
圖5中,Mi為單個車輪的驅(qū)動力矩,Pi為單個車輪所受的壁面牽引力,f′s為壁面與鋼絲刷的滑動摩擦力,R為車輪半徑,a為清洗小車行駛加速度。
根據(jù)動力學(xué)模型,當(dāng)壁面傾角θ為0°~360°時,清洗小車的驅(qū)動平衡方程為:
(18)
式中:m為清洗小車質(zhì)量。
為保證清洗小車穩(wěn)定驅(qū)動行駛,單個車輪需滿足:
Mi-PiR-Jiαi≥0
(20)
式中:Ji為單個車輪轉(zhuǎn)動慣量;αi為單個車輪角加速度。
清洗小車的四個車輪采用同種電機驅(qū)動,可以認為Pi相等,Mi相等,則單個車輪的驅(qū)動力矩應(yīng)滿足:
(21)
式中:μ3為壁面與鋼絲刷的動摩擦因數(shù),μ3=0.5。
4.2 差速轉(zhuǎn)向
爬壁射流清洗小車在罐體壁面上轉(zhuǎn)向靠左右兩側(cè)車輪的速度差來實現(xiàn),對清洗小車進行原地差速轉(zhuǎn)向動力學(xué)建模,如圖6所示。圖6中f′i為壁面與單個車輪之間的滑動摩擦力,d為鋼絲刷旋轉(zhuǎn)直徑。
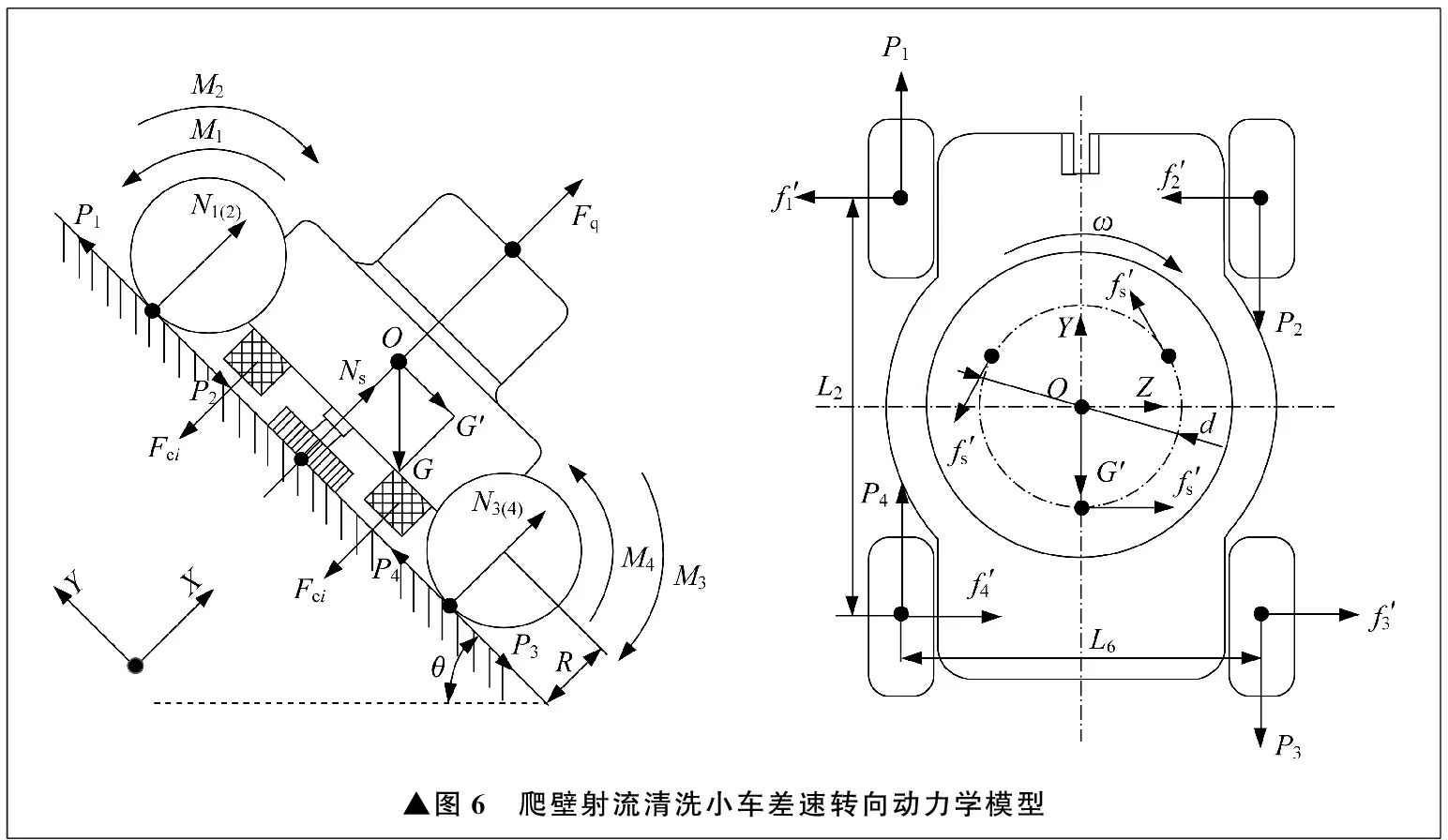
▲圖6 爬壁射流清洗小車差速轉(zhuǎn)向動力學(xué)模型
假設(shè)清洗小車的轉(zhuǎn)向過程為勻速轉(zhuǎn)動,根據(jù)動力學(xué)模型,當(dāng)壁面傾角θ為0°~180°時,清洗小車的轉(zhuǎn)向平衡方程為:
(22)
P1-P2-P3+P4-Gsinθ=0
(23)
(24)
為保證清洗小車勻速平穩(wěn)轉(zhuǎn)向,單個車輪需滿足:
M1-P1R≥0
(25)
單個車輪所需驅(qū)動力矩應(yīng)滿足:
(26)
式中:μ4為壁面與車輪橡膠的動摩擦因數(shù),μ4=0.8。
同理,當(dāng)壁面傾角θ為180°~360°時,為保證清洗小車勻速平穩(wěn)轉(zhuǎn)向,單個車輪所需驅(qū)動力矩應(yīng)滿足:
(27)
4.3 數(shù)值模擬
將各計算參數(shù)代入式(21)、式(26)、式(27),得到勻速直線行駛與差速轉(zhuǎn)向的動態(tài)驅(qū)動力矩模擬曲線,如圖7所示。

▲圖7 動態(tài)驅(qū)動力矩模擬曲線
由圖7可以看出,在任意壁面傾角下,差速轉(zhuǎn)向所需的最小驅(qū)動力矩都遠大于勻速直線行駛,因此清洗小車在進行罐體內(nèi)壁清洗的行走過程中,最容易發(fā)生的失穩(wěn)形式是差速轉(zhuǎn)向受阻,或者因驅(qū)動力矩不足導(dǎo)致轉(zhuǎn)向不到位及轉(zhuǎn)向偏移等情況。因此,為確保清洗小車在清洗過程中平穩(wěn)運行,每個車輪需提供的驅(qū)動力矩至少為3.24 N·m。
5 結(jié)束語
筆者對爬壁射流清洗小車在罐體壁面的清洗工作進行分析,針對清洗小車靜態(tài)受力和動態(tài)驅(qū)動,對清洗小車進行了靜力學(xué)和動力學(xué)建模,推導(dǎo)電磁鐵吸附力保證清洗小車不下滑、不傾覆、不翻轉(zhuǎn),以及驅(qū)動力矩保證清洗小車平穩(wěn)直行、轉(zhuǎn)向五個理論公式,并且得到了清洗小車的吸附最易失穩(wěn)形式和行駛最易失穩(wěn)形式,為清洗小車電磁鐵、驅(qū)動電機及相應(yīng)減速機的選擇提供了依據(jù),也為罐車爬壁射流清洗設(shè)備的力學(xué)分析提供了參考。
分析得出,清洗小車最易發(fā)生的吸附失穩(wěn)形式為沿壁面下滑,最易發(fā)生的行駛失穩(wěn)形式為差速轉(zhuǎn)向,保證清洗小車穩(wěn)定可靠運行的最小電磁吸附力為51.69 N,最小驅(qū)動力矩為3.24 N·m。
