基于數字圖像技術的靜壓樁周土體位移規律分析
2021-02-24 08:50:48王校勇
上海大學學報(自然科學版) 2021年6期
關鍵詞:深度
姜 赟 , 陸 燁, 王校勇
(1.上海大學土木工程系, 上海 200444;2.上海勘察設計研究院(集團)有限公司, 上海 200093)
靜壓樁具有施工速度快、無污染、完成性高等優勢[1], 在工程建設中被大規模推廣.尤其在軟土地區以及不允許有強烈振動的地方, 靜壓樁是一種有效施工方法.但隨著樁體的壓入,樁周土體的側向擠壓、淺部地表的隆起、樁端部側向下的壓縮剪切等強擾動大變形行為會不可避免地對相鄰的既有建筑物及環境產生影響[2].
圍繞靜壓樁沉樁擠土效應, 越來越多的學者開展了大量研究, 其中包括用有限元模擬的結果與現場實際測得的不同深度的土體位移進行對比[3].然而, 由于現場試驗成本過高, 使得部分研究大多集中在室內通過模型試驗來完成[4-5].為了直接測得樁周土體位移場的情況, 很多學者采用數字圖像相關(digital image correlation, DIC)技術來完成.DIC 技術是變形場非界面量測的一種簡便、經濟且實用的途徑, 例如, 在固體和流體力學領域中應用較多的粒子圖像測速技術(particle image velocimetry, PIV)[6-7].在采用DIC 技術研究壓樁的試驗[8-11]中, 有的學者采用透明土和自行設計的靜壓樁模型試驗系統, 但是由于透明土土樣性質和透明度制備的特殊性, 模型箱與樁體尺寸都受到限制;有的采用半模樁并觀測土體中標志點移動情況來得到得到土體的位移場, 但需要人為設置固定的標記點, 且研究大多集中在壓樁結束時的最終位移.另外, 壓入過程中樁周土體位移變化規律及其與土壓力的關系方面的研究也較少.
當樁被壓入砂土中時, 樁體表面與土體相互作用, 形成具有大量顆粒旋轉和平移特征的剪切帶擾動區.在壓樁過程中, 擾動薄層很難被捕捉觀察, 因此對壓樁模型試驗觀察擾動層[12]的研究有限.有的研究人員使用界面剪切試驗研究該區域中的顆粒位移[13-14], 但這與真實的剪切擾動區規律有所區別.
本工作采用DIC 圖像技術研究沉樁壓入過程中土體位移變化情況, 同時對剪切擾動區域的顆粒位移進行跟蹤, 監測壓樁過程中土體中產生的應力, 分析并得了到土體應力及相應位移的規律.
1 試 驗
1.1 模型裝置
圖1 為試驗采用的模型裝置, 包括模型箱、加載系統、數碼相機、模型樁、攝影燈等.模型箱尺寸為1 m×1 m×1 m, 上部配備電控液壓千斤頂, 裝載能力為10 t, 模型樁采用半圓鋁合金樁, 半徑R為25 mm, 長Lo為550 mm, 無樁尖(180?).與文獻[8-9]中的試驗裝置(樁徑5.7~10 mm)相比, 本工作擴大了模型箱和樁的尺寸.試驗過程中, 樁體最終貫入深度為450 mm, 貫入速度為2.5 mm/s.為了監測壓樁引起的側向土應力的情況, 在距樁體中心75~325 mm 的6 個位置(間隔50 mm),深度150、250、350 和450 mm 處共設置了24 個微型土壓力計.為了減輕自然光對圖像質量的影響, 模型箱外部放置了2 個攝像燈, 從不同角度照射鋼化玻璃.為了觀察壓樁過程中樁-土界面的剪切擾動區的情況, 在玻璃近表面處設置微距攝像頭拍攝局部場.

圖1 模型裝置Fig.1 Model test setup
1.2 土樣性質與制備
試驗所用的材料是自然干燥的建筑黃砂, 其基本性質見表1.

表1 砂土的基本性質Table 1 Basic properties of sand
為了保證每次試驗的密實度相似, 使用標準化程序制備砂.同時, 為了方便埋置土壓力計,在模型箱中分5 層鋪設干砂, 鋪設高度依次為350、100、100、100、150 mm.試驗前, 預先將試驗用的干砂全部放置于一大型塑料容器中, 隨后根據各層鋪設厚度計算出干砂在塑料容器中對應體積的高度, 并做好標記.制備土樣的過程中, 將該塑料容器中對應高度的干砂, 采用雨落法逐層鋪設到模型箱中, 嚴格控制好每層的體積和重量, 鋪設完成后, 靜置24 h, 讓砂土在自重作用下壓實.為了驗證制備的砂體密度, 每次試驗后都進行一次靜力觸探試驗, 利用Mayne等[15]的方法估算相對密度, 經過比對后, 制備過程可達到較好的重復性.
1.3 圖像及數據處理
DIC 是一種基于光學的不直接接觸而檢測物體變形的技術.本工作基于MATLAB 軟件自行編制計算程序, 通過對樁側土體位移采用無標示點方法進行連續采集, 實現對沉樁過程中樁周土體位移的動態分析, 并擬合土體的位移軌跡.相比較商業的PIV 系統, 本系統處理數據操作靈活, 可以計算并提取觀察面所有位置任何時刻的水平及豎向位移, 也可導出矢量圖和位移平均值.
試驗得到的圖像可以分成多個小的圖像子集, 通過計算每個圖像子集的位移最終獲得整個圖像的位移場.每個子集內的灰度值分布可以定義為一個函數f(i,j), 被拍攝對象變形或移動后的第二幅圖像中對應子集的灰度分布函數為g(i+?x,j+?y).?x和?y表示為i和j的位移[16-17].采用MATLAB 圖像匹配的標準相關函數為

在進行DIC 計算時, 位移場精確性不僅取決于圖像質量, 還取決于像素子集[18].在反復計算并對比后, 本試驗對于全場圖像選取像素為12×12 的子集進行計算, 對于局部場圖像,子集像素為24×24.另外, 為了通過圖像的像素坐標推導出土顆粒的實際坐標[19], 每次試驗前都需要進行標定.本工作中全場圖像的標定系數為0.557 mm/pixel, 局部場的標定系數為0.013 mm/pixel.
2 試驗結果與分析
2.1 全場位移
圖2 為基于DIC 技術繪制的土體位移等值線圖.圖2(a)為壓樁深度為450 mm(18R)時土體最終的水平位移云圖, 正值表示向右位移,H為樁端的實際深度,r為距樁中心軸線的徑向距離,Z為豎向深度(地表處為0),r和Z均按樁半徑歸一化、沉樁過程中, 土體受樁身的影響向兩旁擠開.當樁被壓到18R的位置時, 徑向影響范圍約為14R, 且隨著壓樁深度的增加, 影響范圍也隨之增大.圖2(a)顯示, 側向土體位移場的影響范圍可在樁端下延伸至大約0.5H的距離.圖2(b)為樁深18R時土體的豎向位移等值線圖, 正值表示向下位移.試驗表明, 沿樁身的土的豎向位移可分為兩個區, 其中一個區受樁端擠壓作用, 土體向下移動;另一個區為樁身上半部的土體, 向上運動, 表明發生了土體隆起.總的來說, 水平和豎向土顆粒位移的輪廓與文獻[20]中采用室內半模方樁試驗觀察到的輪廓相似, 但本工作中圖像記錄的數據范圍更大,邊界效應的影響更小.圖2(c)為在水平位移和豎向位移的基礎上合成的位移矢量圖, 其中每個向量表示在大約28 mm×28 mm 的區域內發生的位移.圖2(c)清晰地顯示了樁端在18R深度時土體最終位移的上升和下降趨勢.
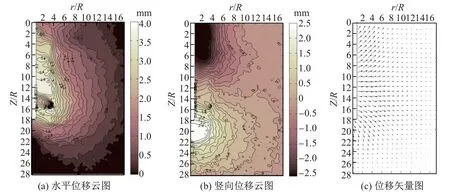
圖2 H =18R 時的土體位移云圖和矢量圖Fig.2 Contour maps and vector maps of soil displacements when H =18R
2.2 樁周土體累計位移
圖3 為不同徑向距離處的土體隨壓樁深入而產生的累計水平位移, 規定向右移動為正.由圖3 可知: 不同徑向距離處土體的位移變化規律大致相同, 都經歷了一個由緩慢增加至穩定的過程, 當某一測點的位移達到穩定狀態時, 樁端深度均超過測點深度.這與羅戰友等[3]通過現場試驗實測發現最大水平擠土位移與壓樁深度存在著滯后效應的現象一致, 即壓樁深度達到某一位置點時, 這一位置的水平位移還未達到最大值, 而是當壓樁深度超過這一位置時才達到最大值, 且在隨后的壓樁過程中最大值基本保持恒定.對比不同位置的測點發現: 距離樁體越遠, 土體的水平累計位移的最大值越小;深處土體的位移比淺處土體穩定得更慢, 其最大值也更大.

圖3 各深度處不同徑向距離測點的水平累計位移Fig.3 Horizontal cumulative displacement of measuring points with different radial distances at different depths
圖4 為不同徑向距離處隨樁體的深入而產生的累計豎向位移變化過程.由圖4 可知: 與水平累計位移規律相似, 不同徑向距離測點處的豎向累計位移隨著沉樁深度的增加逐漸達到穩定狀態, 距離樁體較遠的測點位移總比距離樁體較近的位移小;與累計水平位移不同, 隨著壓樁的進行, 較深處的土體的位移模式是先向下運動, 隨后向上運動, 且變化在樁端位于測點深度上方約2R時便發生了, 而Z=6R處的土體由于深度較淺, 向下運動的位移不明顯.

圖4 各深度處不同徑向距離測點的豎向累計位移Fig.4 Vertical cumulative displacement of measuring points with different radial distances at different depths
2.3 樁周土體最終位移
試驗過程中, 樁體共壓入450 mm(18R).圖5 為壓樁深度為18R時, 距樁體中心不同徑向距離的土體最終水平位移.由圖5 可知: 土體水平位移最大值約在深度16R處, 即樁端深度上方約2R處;上半部分土體水平最終位移沿深度的增加而增加, 當土體深度超過16R時, 最終位移沿深度的增加而減小, 且隨著徑向距離的增加, 最終水平位移在逐漸減少.例如:r= 3R位置土體的水平位移最大值為3.8 mm, 約為樁徑的7.6%;r=5R位置土體的水平位移最大值為3 mm, 約為樁徑的6%;r=7R處最大值為2.3 mm, 約為樁徑的4.6%.
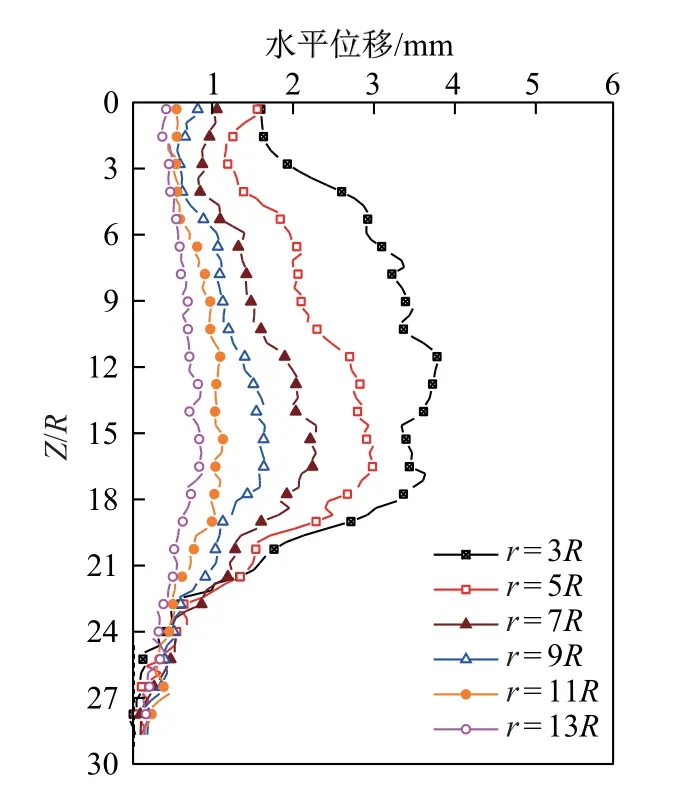
圖5 H =18R 時不同徑向距離土體的最終水平位移對比圖Fig.5 Horizontal displacement at different radial distance
圖6 為壓樁結束時距離地表不同深度處土體的豎向位移圖.由圖6 可知, 距離樁體中心越遠, 土體的豎向位移量越小.Z=0、6R和10R深度處的土體最終向上移, 其中Z=0 處土體隆起, 位移最大值在樁土界面處, 約為2.5 mm, 與Z= 6R處土體的豎向位移大小相當, 但在Z= 6R處,r= 3R到10R范圍內的土體豎向位移更大.Z= 14R和Z= 18R處土體向下移動, 其中Z= 18R處土體的徑向影響范圍最大, 約為7R.向上運動和向下運動的分界線約為Z=12R處(見圖2(b)), 約為壓樁深度的2/3.

圖6 H =18R 時不同深度土體的最終豎向位移Fig.6 Comparative of Vertical displacement at different depth
觀察Z= 10R和Z= 14R處位移曲線的趨勢可以看出, 土體的豎向位移有曲折的表現,結合試驗過程中不同時間點的云圖分析, 原因是樁體在貫入初期, 土體的運動趨勢向下, 隨著壓樁深度的增加, 土體的運動方向改為向上運動, 于是發生了曲線的轉折, 根據曲線的轉折位置可以判斷運動方向改變最劇烈的范圍主要在集中在距離樁中心1R ~3R的范圍內.
2.4 樁周土壓力與土體位移
試驗過程中, 土中不同深度和不同徑向距離處鋪設了微型土壓力傳感器, 用以研究靜壓沉樁過程對周圍土體的擠壓效應.土壓力計是側向埋設, 測得的皆為水平土壓力, 并且只記錄試驗過程中的土壓力增量.圖7 為沉樁過程中側向土壓力增量的峰值在不同深度處沿徑向衰減變化.可以看出, 在沉樁過程中, 同一深度下, 距離樁體較近的土體受沉樁擠壓作用影響更大.同時, 在同一徑向距離下, 深層土體的土壓力受沉樁影響更大, 這一方面是由于深層土體較淺層土體更為密實, 另一方面是由于深層土體處于較高的自重應力水平, 所以樁體貫入時土體的擠壓效應也更明顯.
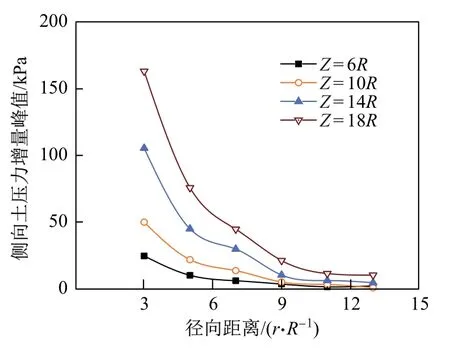
圖7 不同深度樁側向土壓力峰值沿徑向距離變化Fig.7 Peak value of stress increment with radial variation at different depth
側向土壓力受到徑向距離和深度變化的影響, 這一點與之前提到的土體位移變化情況相似.本工作將土壓力增量與土體累計位移變化過程聯合分析.圖8(a)展示了徑向距離r= 5R處不同深度下土體隨樁體的壓入而產生的水平應力增量的變化過程.可以看出, 在不同的深度, 隨著樁端逐漸靠近測點, 應力增量也達到最大.樁端通過后, 應力增量逐漸減少.值得注意的是, 在樁端達到測點深度之前, 測得的水平應力增量已經達到峰值.這種現象可以稱為“提前”效應, 這與Jardine 等[5]的觀察結果一致.圖8(b)是徑向距離5R處不同深度土體隨樁體壓入而產生的的累計水平位移變化過程, 可以看到, 在壓樁開始后, 水平位移先逐漸增大,隨后趨于穩定.比較圖8(a)和(b)可以發現, 當土顆粒間存在應力時, 土體位移逐漸增大, 在土顆粒間應力消散時土體位移趨于穩定.圖8(c)給出了相應位置的累計豎向位移的變化過程.壓樁過程中, 除了較淺處的土體, 其他測點處土體先向下移動, 后向上移動.對比圖8(a)和(c)可以發現, 當側向應力增量降至0 時, 累積豎向位移幾乎也是達到穩定值.值得注意的是, 當土體位移模式從向下運動轉換為向上運動時, 對應時刻的應力增量幾乎同時達到峰值, 這說明土顆粒豎向運動模式發生改變往往是在該處土壓力達到最大值的時刻.
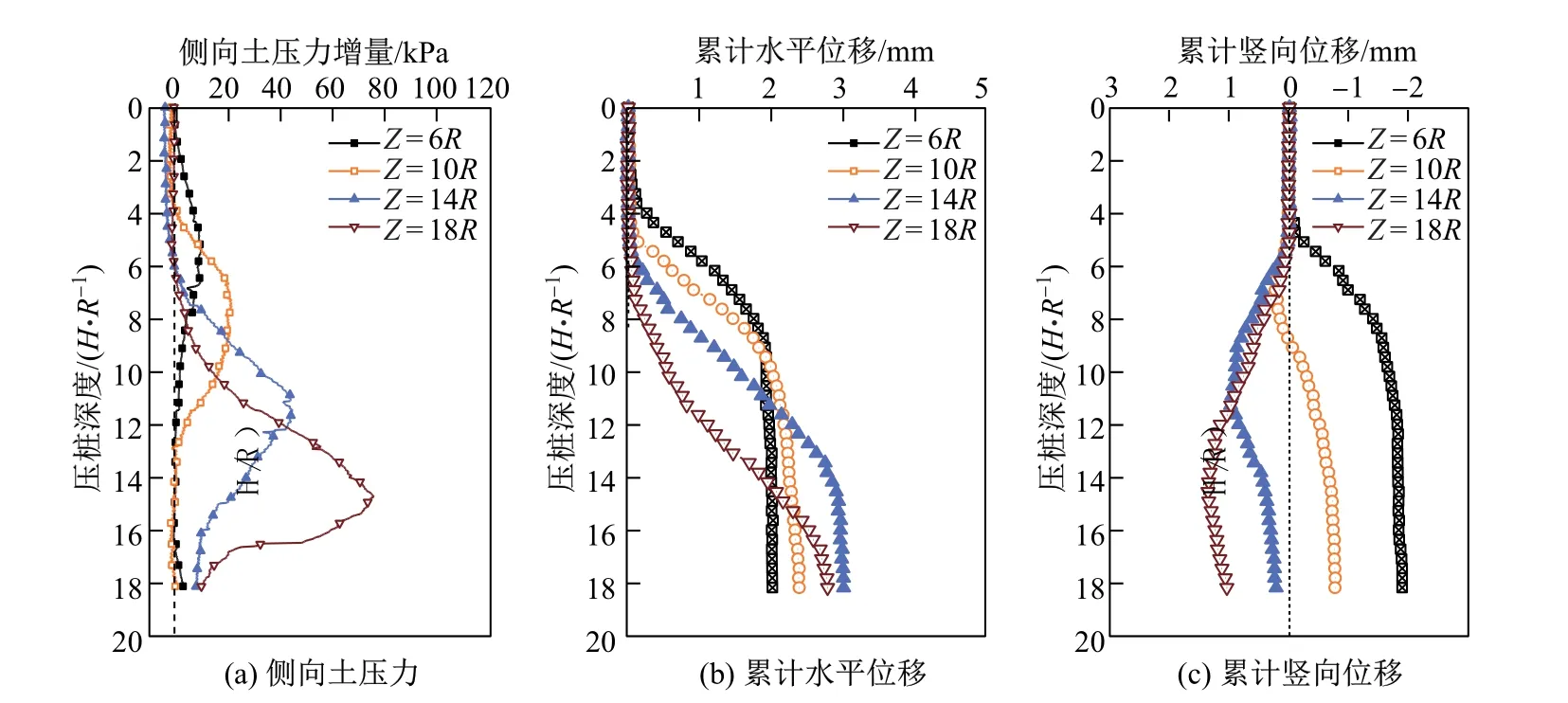
圖8 r =5R 側向土壓力增量和相應位置測點累計位移Fig.8 Horizontal stress increment and corresponding accumulative soil displacements when r =5R
2.5 樁-土界面剪切擾動區
在全場位移分析中, 每幅圖像需要覆蓋的范圍較大, 而相機分辨率是一定的, 故犧牲了樁-土界面土體位移的圖像捕捉.因此, 試驗過程中安裝了一個額外的微距攝像頭捕捉樁-土界面土顆粒位移在壓樁過程中的變化情況, 從而實現對剪切擾動區厚度的測量.微距攝像頭位置在距砂土地表100 mm 深度處(見圖1).圖9(a)為微距攝像頭拍的照片, 試驗過程中為了方便觀察和驗證, 放置了一部分與砂子性質相似的白砂.圖9(b)為樁體剛通過觀察區域, 用DIC 計算的間隔為2 mm 的砂土矢量位移圖.可以看到靠近樁體的一側有明顯的一段位移.當樁與土體發生相對位移時, 距樁身較近的土顆粒在樁體帶動下發生明顯的平動和轉動, 距樁身越近,土顆粒的變位就越大.通過原始照片和DIC 計算的結果可以基本判斷出, 剪切擾動區的厚度為2~3 mm 左右, 即D50的5.7~8.6 倍.對樁體穿過后的圖像也進行了分析, 整個擾動區表現為豎直下移, 并且當樁體穿過后, 擾動區的位移量會減小.

圖9 樁-土界面土體位移情況Fig.9 Soil displacement of pile-soil interface
部分學者研制了配合PIV(或DIC)技術的加載剪切儀, 通過界面剪切試驗模擬分析結構物附近的顆粒運動, 這與實際的壓樁試驗不完全相同, 但也能一定程度上反映樁體的移動帶動土顆粒位移的影響.Dejong 等[13]的研究中, 距結構面5~7 倍粒徑處, 土顆粒的位移和轉角已變得很小, 張嘎等[14]認為接觸面剪切引起的土顆粒變位大約局限在距結構面5~6 倍平均粒徑的范圍內.這些研究與本工作擾動區厚度的5.7~8.6 倍平均粒徑大致吻合.
事實上, 樁身表面的粗糙程度會對擾動區的形成產生影響, 本試驗中使用的是鋁合金材料樁, 這與粗糙表面的實際樁有區別.不僅如此, 擾動區還與土的顆粒級配、土顆粒的摩擦角、壓樁速度等因素有關, 因此, 未來對擾動區的研究還有很多因素和工況要考慮.本工作提出的通過設置局部微距攝像頭并進行DIC 計算的方法, 可以很好地觀察擾動區地厚度和位移.具體的不同顆粒級配、不同粗糙程度等影響還需在進一步的研究中繼續考慮.
3 結 論
數字圖像相關技術作為一種非接觸技術, 可用于樁模型試驗中獲取任意時刻任意位置的土體位移, 并且可以通過云圖或者矢量圖的方式清晰地呈現整個位移場.本工作應用DIC 技術進行了靜壓沉樁全場和局部場的位移計算, 得到如下結論.
(1) 土體的水平位移隨樁體的壓入先逐漸增大, 后趨于穩定, 較深處土體水平位移的穩定值更大.壓樁結束后, 水平位移的最大值在樁端上方2R處左右.豎向位移方面, 土顆粒隨著樁體的壓入經歷一個先向下后向上運動的過程, 因深度的不同而產生不同方向的最終位移.壓樁結束后, 以樁深的2/3 為界, 上部土體的最終位移向上, 下部最終位移向下.
(2) 樁體壓入過程中, 側向土體應力變化過程具有“提前”效應: 某深度處土體應力在樁尖到達前已經達到峰值.然而, 隨著土體徑向距離的增加, 該效應不再明顯.同時, 土體應力與水平和垂直位移同時存在對應關系.當土體應力達到最大值時, 該處土體豎向位移模式發生改變.
(3) 樁土界面剪切擾動區厚度約為5.7~8.6 倍平均粒徑, 與文獻研究結果吻合較好.擾動區主要表現為垂直下移, 當樁體穿過后, 位移會逐漸減小.局部攝像頭的設置為觀察擾動區的運動模式提供了良好的參考.
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57
