基于改進(jìn)阻抗控制的自適應(yīng)曲面乳腺超聲掃描方法
2021-02-24 04:51:40謝榮理趙艷娜
中國(guó)機(jī)械工程 2021年2期
關(guān)鍵詞:實(shí)驗(yàn)
沈 運(yùn) 謝榮理 趙艷娜 付 莊 王 堯 張 俊 費(fèi) 健
1. 上海交通大學(xué)機(jī)械系統(tǒng)與振動(dòng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,上海,200240
2. 上海交通大學(xué)醫(yī)學(xué)院附屬瑞金醫(yī)院,上海,200025
3. 上海市瑞金康復(fù)醫(yī)院,上海,200023
0 引言
據(jù)不完全統(tǒng)計(jì),目前全球乳腺癌的發(fā)病率正在以每10年約30%的增長(zhǎng)率不斷攀升,死亡率占發(fā)病病例的15%左右且有進(jìn)一步惡化的趨勢(shì)[1],其現(xiàn)狀不容樂(lè)觀[2]。隨著科學(xué)技術(shù)的發(fā)展與現(xiàn)代醫(yī)療水平的提高,早期乳腺癌的治愈率可達(dá)90%以上,因此,有效的乳腺癌篩查便成為輔助醫(yī)生確定臨床治療方案的關(guān)鍵[1,3-5]。超聲作為一種簡(jiǎn)單安全、價(jià)格低廉的乳腺癌篩查方法,已經(jīng)被廣泛地運(yùn)用在臨床實(shí)踐中,是目前最為常用的一種檢查手段[6]。
當(dāng)前的人工超聲檢查方法存在一定的局限性:一方面,超聲檢查對(duì)操作人員的技術(shù)要求較高[7-8],缺乏專(zhuān)業(yè)技師使得小規(guī)模診所無(wú)法應(yīng)對(duì)高強(qiáng)度的超聲檢查,大型醫(yī)院又顯得負(fù)擔(dān)過(guò)重[9-10];另一方面,人工超聲檢查難以制定統(tǒng)一的操作規(guī)范和掃描標(biāo)準(zhǔn),不利于病例的總結(jié)和復(fù)習(xí)[11]。相較而言,機(jī)器人輔助超聲掃描具有更高的位置精度和良好的重復(fù)性,且可以全天持續(xù)工作,足以應(yīng)對(duì)任何高強(qiáng)度的掃描任務(wù);此外,使用機(jī)器人還更容易制定規(guī)范來(lái)統(tǒng)一操作流程。綜上,利用機(jī)器人輔助或在一定程度上取代操作人員進(jìn)行超聲檢查便成為研究熱點(diǎn)。
機(jī)器人輔助超聲掃描的研究始于1999年,PIERROT等[12]將六自由度串聯(lián)機(jī)械手運(yùn)用到超聲掃描中,達(dá)到了超聲探頭沿預(yù)定軌跡以恒力完成掃描的目的;BOCTOR等[13]在肝臟消融手術(shù)中,利用機(jī)械臂夾持超聲探頭并配合核磁共振(magnetic resonance,MR)或電子計(jì)算機(jī)斷層掃描(computed tomography,CT)成像數(shù)據(jù),對(duì)目標(biāo)腫瘤做到了術(shù)中實(shí)時(shí)定位;SHINYA等[14]根據(jù)穿刺平面的實(shí)時(shí)定位信息,利用機(jī)械臂夾持超聲探頭來(lái)減少呼吸對(duì)圖像偏移的影響;MUSTAFA等[15]利用超聲圖像修正探頭偏轉(zhuǎn),使其能夠盡可能貼合皮膚表面;GRAUMANN等[16]利用機(jī)械臂夾持超聲探頭沿深度相機(jī)采集并規(guī)劃出的軌跡完成掃描。近年來(lái),國(guó)內(nèi)諸多研究機(jī)構(gòu)或科研人員也開(kāi)展了對(duì)機(jī)器人輔助超聲掃描的研究。如WU等[17]利用Kinect相機(jī)采集組織表面結(jié)構(gòu)數(shù)據(jù)并規(guī)劃掃描路徑,再通過(guò)三自由度平臺(tái)夾持超聲探頭完成掃描;張娟等[18]同樣利用Kinect相機(jī)作為視覺(jué)導(dǎo)航,從皮膚表面提取掃描路徑后利用六自由度機(jī)械臂夾持超聲探頭完成掃描。此外,就醫(yī)療器械發(fā)展現(xiàn)狀而言,針對(duì)機(jī)器人輔助乳腺掃描,自動(dòng)乳腺全容積掃描(automated breast volume scanner ,ABVS)由于操作方便、成像清晰,已經(jīng)逐漸運(yùn)用到臨床應(yīng)用中。許多醫(yī)院利用相關(guān)產(chǎn)品(如西門(mén)子公司的Acuson S2000),在臨床實(shí)驗(yàn)中均取得了較好的效果[4-5,9,19]。可見(jiàn),機(jī)器人輔助超聲掃描受到了國(guó)內(nèi)外研究者及器械供應(yīng)商的廣泛關(guān)注,人們開(kāi)展了包括乳腺、膀胱、甲狀腺等不同人體組織器官在內(nèi)的機(jī)器人輔助掃描的研究及應(yīng)用,以期最終能夠達(dá)到解放超聲檢查人員、增強(qiáng)超聲圖像質(zhì)量的目的。
目前機(jī)器人輔助乳腺掃描尚有諸多急需改進(jìn)之處,為了提高超聲圖像的質(zhì)量,其中最主要的就是超聲探頭和皮膚表面的貼合問(wèn)題。以Acuson S2000為例,它完成乳腺三維成像的前提是將乳腺壓扁成一個(gè)平面,這種對(duì)乳腺加壓的方式會(huì)引起病人的不適,不適用于乳腺不能受壓或者表皮有損的情況[5]。如果沿著皮膚曲面掃描,則需要提前規(guī)劃掃描的路徑才能使超聲探頭和皮膚曲面保持法向垂直。但是提前對(duì)乳腺進(jìn)行外形輪廓建模,不僅增加了掃描前的工作量,特別是對(duì)醫(yī)療級(jí)別不高的診所來(lái)說(shuō),經(jīng)濟(jì)性顯然不足[10],而且相機(jī)不一定能拍攝到整個(gè)待掃描區(qū)域,對(duì)掃描區(qū)域的大小有一定的限制。另外,在掃描過(guò)程中為了保證圖像質(zhì)量和掃描安全性等問(wèn)題,還需要通過(guò)一些方式將超聲探頭和皮膚表面的接觸力反饋給控制系統(tǒng),通過(guò)控制兩者之間的相對(duì)位姿來(lái)保持一定程度上的恒力。這對(duì)掃描過(guò)程中的力反饋控制提出了要求。
在力反饋控制研究方面,阻抗控制占有相當(dāng)重要的地位。自HOGAN[20]于1985年提出阻抗控制方法起,該控制方式就被研究人員廣泛應(yīng)用于力反饋控制當(dāng)中。CAMARILLO等[21]在鉆骨手術(shù)中使用阻抗控制方法來(lái)調(diào)節(jié)刀具速度,用以適應(yīng)不同的骨密度情況;ROBODOC外科手術(shù)系統(tǒng)[22]同樣利用阻抗控制方法在髖關(guān)節(jié)置換手術(shù)中提供自適應(yīng)的刀具進(jìn)給速度;王嵐等[23]在手臂康復(fù)機(jī)器人中使用阻抗控制方法實(shí)現(xiàn)了機(jī)器人的柔順運(yùn)動(dòng)控制;蔡國(guó)慶[24]利用阻抗控制方式降低了主從式穿刺設(shè)備從端的接觸力波動(dòng),提高了穿刺的可靠性。鑒于此,尋找一種基于力反饋控制的自適應(yīng)曲面乳腺超聲掃描方法對(duì)于解決上述貼合問(wèn)題將大有裨益。
本文首先分析掃描過(guò)程中超聲探頭和皮膚表面的相互作用,并根據(jù)其力學(xué)規(guī)律提出一種基于阻抗控制的控制算法來(lái)保證探頭和皮膚表面之間的法向接觸力基本恒定,進(jìn)而使得掃描過(guò)程中超聲探頭和皮膚表面始終保持法向垂直;其次,根據(jù)控制器存在的不足,提出控制算法的改進(jìn)方法,使其更能滿足上述要求;再次,通過(guò)搭建實(shí)驗(yàn)平臺(tái)完成乳腺體模和實(shí)際人體的測(cè)試實(shí)驗(yàn);最后,驗(yàn)證所提控制算法在曲面自適應(yīng)貼合問(wèn)題上的表現(xiàn)性能。
1 曲面自適應(yīng)貼合控制算法
1.1 超聲探頭與皮膚表面的相互作用
圖1所示為超聲探頭與皮膚表面相互作用示意圖。掃描過(guò)程中,超聲探頭與皮膚表面之間的作用力主要有:垂直于皮膚表面的法向接觸力FN和平行于皮膚表面的運(yùn)動(dòng)阻力FR。以接觸點(diǎn)T為原點(diǎn)建立笛卡兒坐標(biāo)系,其中,x為超聲探頭的運(yùn)動(dòng)方向;y為超聲探頭的擺動(dòng)方向;z為超聲探頭軸向,與皮膚表面保持法向垂直;超聲探頭在以速度u沿著皮膚表面掃描的過(guò)程中,探頭除了受到自身重力G外,還受到法向接觸力FN和運(yùn)動(dòng)阻力FR的作用。
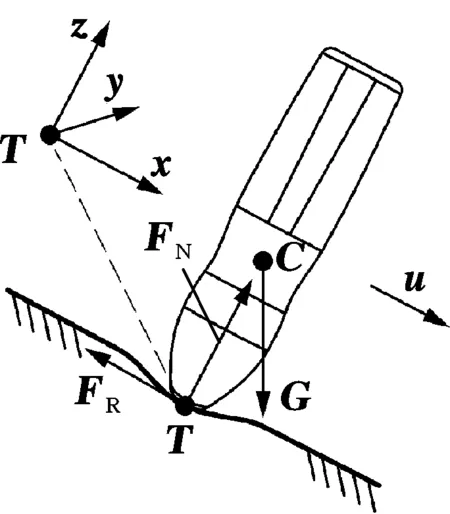
圖1 超聲探頭與皮膚表面的相互作用
法向接觸力FN來(lái)源于超聲探頭和皮膚表面之間的擠壓,而運(yùn)動(dòng)阻力FR則主要由兩部分阻力組成:①超聲探頭相對(duì)于皮膚表面運(yùn)動(dòng)引起的滑動(dòng)摩擦力Ff;②超聲探頭在運(yùn)動(dòng)方向上擠壓皮膚引起的壓陷阻力Fp。如圖2a所示,當(dāng)FN較小時(shí),超聲探頭擠壓皮膚較淺,F(xiàn)R以滑動(dòng)摩擦力Ff為主;當(dāng)FN較大時(shí),超聲探頭擠壓皮膚較深,F(xiàn)R以壓陷阻力Fp為主。
滑動(dòng)摩擦力Ff和壓陷阻力Fp均為FN的函數(shù),前、后段曲線采用Sigmoid函數(shù)進(jìn)行光滑性過(guò)渡,則超聲探頭所受運(yùn)動(dòng)阻力大小FR表示為
FR=Ff+Fp=Y(FN)=σ(FN)μfFN+[1-σ(FN)]μp(FN-FNc)
(1)
其中,F(xiàn)Nc為Fp在水平軸上的截距,見(jiàn)圖2b;σ(FN)是一個(gè)S型函數(shù),當(dāng)FN較小時(shí)其值趨近于1,反之趨近于0,可以表示為

(a) 擠壓皮膚深淺
(2)
其中,F(xiàn)N0為過(guò)渡區(qū)域橫坐標(biāo)中心,見(jiàn)圖2b;α表示S型函數(shù)的陡峭程度,其值越大,函數(shù)曲線越陡。在滑動(dòng)摩擦因數(shù)μf和壓陷摩擦因數(shù)μp都確定的情況下,可通過(guò)最小二乘法得到FN0及α:
(3)
其中,p1~p4為中間變量,F(xiàn)Ni、FRi分別為第i組法向接觸力和運(yùn)動(dòng)阻力,n為數(shù)據(jù)對(duì)(FNi,FRi)的總個(gè)數(shù),i為每個(gè)數(shù)據(jù)對(duì)的標(biāo)號(hào),凡納入計(jì)算的數(shù)據(jù)對(duì),必須滿足FN位于過(guò)渡區(qū)域。
1.2 控制算法
為了保證超聲探頭和皮膚間的法向接觸力恒定,需要設(shè)計(jì)控制算法使得FN保持在一個(gè)設(shè)定值FNr附近。當(dāng)FN基本不變時(shí),如果超聲探頭在掃描過(guò)程中偏離了與皮膚表面保持法向垂直的狀態(tài),那么它受到的運(yùn)動(dòng)阻力也一定會(huì)有所變化。
如圖3所示,當(dāng)超聲探頭姿態(tài)傾向于參考運(yùn)動(dòng)方向時(shí),其實(shí)際運(yùn)動(dòng)方向有指向皮膚表面的分量,前進(jìn)方向的阻礙將變得更為明顯,受到的運(yùn)動(dòng)阻力會(huì)增大;反之,當(dāng)超聲探頭姿態(tài)遠(yuǎn)離參考運(yùn)動(dòng)方向時(shí),其實(shí)際運(yùn)動(dòng)方向有背離皮膚表面的分量,前進(jìn)方向的阻礙將會(huì)減少,受到的運(yùn)動(dòng)阻力減小。其中,xr為參考運(yùn)動(dòng)方向,xa為實(shí)際運(yùn)動(dòng)方向,xax和xaz分別為xa在參考運(yùn)動(dòng)方向和參考皮膚法向方向上的分量。

(a) 探頭姿態(tài)傾向參考運(yùn)動(dòng)方向,阻力增大
為了保證超聲探頭在掃描的過(guò)程中基本與皮膚表面保持法向垂直,需要設(shè)計(jì)控制算法使得FR保持在參考值FRr附近,而FRr可由實(shí)時(shí)采集得到的FN及式(1)~ 式(3)確定。
在控制超聲探頭進(jìn)行掃描時(shí),為了達(dá)到力的跟蹤效果,本文采用阻抗控制的方法。如圖4所示,被控變量分別為探頭到皮膚的間距l(xiāng)z和探頭在xz平面內(nèi)的轉(zhuǎn)角θy。根據(jù)阻抗控制方法設(shè)計(jì)的控制器具有如下一般形式:

(4)
其中,M、B、K分別為控制器的慣性、阻尼和剛度矩陣,ΔX及其各階導(dǎo)數(shù)分別表示位置、速度和加速度誤差,ΔF表示受控力誤差。

圖4 被控變量幾何含義
根據(jù)圖1中超聲探頭的受力分析,式(4)中的變量為
(5)
由于機(jī)械臂僅反饋位置和速度信息,故控制器中的慣性矩陣將不予考慮。令參考速度為0,將式(1)代入式(5)可得
(6)
其中,lzr、θyr分別表示參考間距和轉(zhuǎn)角;K1、K2為控制器需要設(shè)計(jì)的參數(shù)矩陣,分別表征力和速度對(duì)探頭位置的影響。
實(shí)際應(yīng)用中,通過(guò)嘗試性實(shí)驗(yàn),參數(shù)矩陣K1和K2為不同掃描速度下根據(jù)目標(biāo)跟蹤效果所確定的較優(yōu)值。嘗試性實(shí)驗(yàn)發(fā)現(xiàn):機(jī)械臂反饋的速度并不準(zhǔn)確,因此,實(shí)際掃描過(guò)程中僅采用位置反饋信號(hào),則設(shè)置K2=0;K1的倒數(shù)就是式(5)的剛度矩陣,即K1=K-1。進(jìn)一步,將由控制器得到的參考間距和轉(zhuǎn)角轉(zhuǎn)換成超聲探頭的位姿Pr輸入機(jī)械臂控制系統(tǒng)即可得到整個(gè)閉環(huán)控制流程,如圖5所示。在控制過(guò)程中,每個(gè)控制周期采用由式(6)計(jì)算得到的lzr和θyr作為下一個(gè)控制周期的目標(biāo)值,并分別替換運(yùn)動(dòng)代碼中的運(yùn)動(dòng)目標(biāo)。

圖5 基于阻抗控制的閉環(huán)控制算法
2 控制算法的改進(jìn)
2.1 探頭轉(zhuǎn)角的估計(jì)方式
在對(duì)探頭轉(zhuǎn)角的控制中,使用式(1)來(lái)計(jì)算參考運(yùn)動(dòng)阻力值FRr,然而這樣的方式(力控方法)不一定完全準(zhǔn)確,原因是:一方面,式(1)只能通過(guò)實(shí)驗(yàn)來(lái)唯一確定,這使得不同的實(shí)驗(yàn)條件可能導(dǎo)致一些隨機(jī)誤差;另一方面,在掃描過(guò)程中也不能完全確定式(1)所對(duì)應(yīng)的曲線是否會(huì)發(fā)生改變。因此,筆者擬尋求另一種可行方式對(duì)探頭轉(zhuǎn)角進(jìn)行估計(jì),來(lái)矯正僅通過(guò)式(1)作為一種估計(jì)方式所得到的結(jié)果,從而通過(guò)融合兩種估計(jì)方式來(lái)彌補(bǔ)單一估計(jì)方式的不足。
在掃描過(guò)程中,通過(guò)前述的控制方式可以保持超聲探頭和皮膚間法向接觸力基本不變(或達(dá)到允許誤差范圍內(nèi)的振蕩穩(wěn)定),這說(shuō)明超聲探頭的歷史掃描軌跡可以在一定程度上反映出之前掃描過(guò)的曲面形狀;而且人體的皮膚表面是連續(xù)的,所以可對(duì)探頭的歷史掃描軌跡進(jìn)行擬合,來(lái)估計(jì)當(dāng)前的探頭轉(zhuǎn)角參考值,如圖6所示。

圖6 從掃描軌跡估計(jì)轉(zhuǎn)角參考值
歷史軌跡曲線在所在有限范圍內(nèi)基本位于同一個(gè)圓上(以點(diǎn)E為圓心),則每次選取Δw個(gè)周期內(nèi)的軌跡點(diǎn)進(jìn)行直線擬合可以近似得到其中心點(diǎn)處的轉(zhuǎn)角。圖6中選取兩段相差Δs個(gè)軌跡點(diǎn)的軌跡進(jìn)行線性擬合得到lⅠ和lⅡ,分別對(duì)應(yīng)轉(zhuǎn)角θⅠ和θⅡ,則可以得到當(dāng)前的轉(zhuǎn)角估計(jì)值:
(7)
2.2 改進(jìn)的轉(zhuǎn)角控制
利用上述方式得到對(duì)轉(zhuǎn)角參考值的估計(jì)后,再融合兩個(gè)估計(jì)值,即可得到最終的轉(zhuǎn)角參考值,從而對(duì)轉(zhuǎn)角控制進(jìn)行改進(jìn)。
估計(jì)值的融合借鑒了卡爾曼濾波器的思想,若從力控方法得到的估計(jì)值為θyr,則其方差為Py;若從掃描軌跡得到的估計(jì)值為θyp,則其方差為Ry,那么可以得到融合后的轉(zhuǎn)角參考值:
(8)
其中,K為卡爾曼增益,上標(biāo)帶撇的變量為融合結(jié)果,方差Py的初值可以根據(jù)式(1)所對(duì)應(yīng)的曲線進(jìn)行估計(jì),方差Ry可以根據(jù)|θyp-θⅡ|進(jìn)行估計(jì)。
實(shí)際應(yīng)用中,式(6)確定的θyr和式(7)確定的θyp通過(guò)式(8)得到融合后的下一個(gè)周期轉(zhuǎn)角控制目標(biāo)θ′yr。其中,由兩個(gè)歷史軌跡坐標(biāo)序列求得θyp,每個(gè)序列包含Δw個(gè)坐標(biāo),兩者相差Δs個(gè)坐標(biāo),每個(gè)控制周期都用后續(xù)坐標(biāo)更新當(dāng)前兩個(gè)序列。然后,每個(gè)控制周期采用由融合后的θ′yr和式(6)計(jì)算得到的lzr作為下一控制周期的目標(biāo)值,并分別替換運(yùn)動(dòng)代碼中的運(yùn)動(dòng)目標(biāo)。
3 實(shí)驗(yàn)研究
采用乳腺體模和人體活體分別搭建實(shí)驗(yàn)平臺(tái),對(duì)上述控制算法的正確性與有效性進(jìn)行實(shí)驗(yàn)驗(yàn)證。乳腺超聲掃描的整體方式采用輻射型掃描方式,如圖7所示。超聲探頭將逐一沿輻射狀掃描軌跡線向遠(yuǎn)離乳頭的方向進(jìn)行掃描。其中,完成單條掃描線的過(guò)程稱(chēng)為一次掃描,完成一圈循環(huán)的掃描線的過(guò)程稱(chēng)為一輪掃描。

圖7 輻射狀乳腺掃描方式示意圖
3.1 乳腺體模實(shí)驗(yàn)
首先搭建了乳腺體模的實(shí)驗(yàn)平臺(tái),主要用以驗(yàn)證模型和算法。如圖8所示,實(shí)驗(yàn)平臺(tái)包括機(jī)械臂1及其控制系統(tǒng)2、六維力傳感器3、超聲探頭4和乳腺體模5。其中,機(jī)械臂末端的重復(fù)定位精度約0.1 mm,六維力傳感器的最小分辨率約0.05 N,超聲探頭采用LA523型探頭,乳腺體模采用3B Scientific公司的P124型模型。

圖8 乳腺體模實(shí)驗(yàn)平臺(tái)
3.2 人體活體實(shí)驗(yàn)
搭建了人體活體掃描的實(shí)驗(yàn)平臺(tái),除用于驗(yàn)證模型和算法外,還將用以驗(yàn)證自動(dòng)掃描圖像采集的完整性。如圖9所示,實(shí)驗(yàn)平臺(tái)中的硬件1~4與乳腺體模實(shí)驗(yàn)平臺(tái)完全相同,此外還包括超聲成像儀5、病床6及人體活體7。其中,超聲成像儀采用Esaote公司的MyLab30型便攜式成像儀,其掃描頻率為12 MHz,掃描深度約為皮膚表面下方50 mm。

圖9 人體實(shí)驗(yàn)平臺(tái)
4 結(jié)果分析與討論
4.1 運(yùn)動(dòng)阻力和法向接觸力的關(guān)系
選擇乳腺體模上的一塊近似平面的皮膚,使得超聲探頭與其保持法向垂直,涂上超聲耦合劑后控制超聲探頭在表面上運(yùn)動(dòng)。在不同的掃描速度 (分別取0.2,0.3,0.4,0.5,0.6,0.7,0.8,單位為mm/cycle,即每個(gè)控制周期移動(dòng)的毫米距離) 下,保證超聲探頭和皮膚表面的法向接觸力維持在一定的值附近(分別取0.5,1.0,2.0,3.0,4.0,5.0,6.0,單位為N)。每個(gè)掃描速度和法向接觸力進(jìn)行10次實(shí)驗(yàn),記錄所受的運(yùn)動(dòng)阻力均值,如圖10所示。

圖10 運(yùn)動(dòng)阻力和法向接觸力的關(guān)系
從實(shí)驗(yàn)數(shù)據(jù)中可以發(fā)現(xiàn):即便是不同掃描速度下的數(shù)據(jù)點(diǎn)依然聚集在較小的范圍內(nèi),因此,掃描速度對(duì)FR和FN之間關(guān)系的影響較小。對(duì)數(shù)據(jù)點(diǎn)進(jìn)行線性擬合可得μf=0.095,μp=0.140,F(xiàn)Nc=-0.192 N;再根據(jù)式(3)通過(guò)最小二乘法可得α=5.161,F(xiàn)N0=2.485 N;擬合得到的曲線如圖10所示。擬合曲線的R2指標(biāo)約為0.987,說(shuō)明利用式(1)對(duì)運(yùn)動(dòng)阻力和法向接觸力之間的關(guān)系進(jìn)行擬合是可行的。
4.2 法向接觸力的變化
通過(guò)不斷調(diào)整參數(shù)可以得到一個(gè)表現(xiàn)較好的控制器參數(shù)K1=diag(Kl,Kθ),此時(shí)的控制參數(shù)與超聲探頭掃描速度的關(guān)系如圖11所示。

圖11 控制器參數(shù)選擇
隨著掃描速度的上升,兩個(gè)控制器參數(shù)都需要隨之上升來(lái)達(dá)到跟蹤的效果。其中,Kl的增速隨著掃描速度u的上升而逐漸放緩,Kθ則與u呈線性的關(guān)系。選定一個(gè)u可以得到相應(yīng)的控制參數(shù),例如圖11中選擇u=0.4 mm/cycle可以得到對(duì)應(yīng)的控制參數(shù)分別為Kl=0.76,Kθ=0.0217。
使用上述控制參數(shù)得到的法向接觸力曲線如圖12所示,其中分別給出了不同法向接觸力水平下的跟蹤效果,在開(kāi)始跟蹤前先將法向接觸力調(diào)整至參考值附近。從圖12中可以發(fā)現(xiàn):實(shí)時(shí)采集的法向接觸力基本維持在給定的參考值,平均振蕩范圍與參考值的偏差在±0.2 N以內(nèi),跟蹤效果良好。

圖12 法向彈力跟蹤情況
其他不同掃描速度u下的法向彈力跟蹤亦能達(dá)到上述效果。需要指出的是:針對(duì)實(shí)際臨床應(yīng)用場(chǎng)景,控制器的參數(shù)矩陣和皮膚表面的潤(rùn)滑狀況都可能對(duì)恒力跟蹤效果產(chǎn)生影響。本實(shí)驗(yàn)中始終使用同一種超聲耦合劑來(lái)滿足全潤(rùn)滑狀態(tài),從而間接保證皮膚表面的潤(rùn)滑狀況基本不變;而控制器的參數(shù)矩陣僅與掃描速度有關(guān),如圖11所示。因此,當(dāng)臨床條件發(fā)生變化時(shí),本文的控制方法可以通過(guò)調(diào)整控制參數(shù)來(lái)達(dá)到恒力跟蹤的效果,即達(dá)到允許誤差范圍內(nèi)的振蕩穩(wěn)定。
4.3 探頭轉(zhuǎn)角的變化
為了衡量探頭轉(zhuǎn)角的跟蹤效果,利用低速掃描得到的歷史軌跡近似擬合出整個(gè)掃描輪廓的外型,并將這樣的擬合曲線作為標(biāo)準(zhǔn)轉(zhuǎn)角曲線,如圖13所示。其中,圖13a為一次低速掃描(取掃描角度為270°)下的標(biāo)準(zhǔn)轉(zhuǎn)角曲線擬合,采用二次參數(shù)曲線進(jìn)行擬合,擬合曲線為
F(x,y)=(1.978x2+6.884xy-1.423y2)×10-31-(0.153x+0.361y-1.830)×10-28
(9)
圖13b為一輪共計(jì)8次低速掃描下得到的標(biāo)準(zhǔn)轉(zhuǎn)角曲線擬合,可以從中較為明顯地看出乳腺的外型,水平面上的直線為輻射狀掃描方式的軌跡。

(a) 一次掃描
(a) 一次掃描
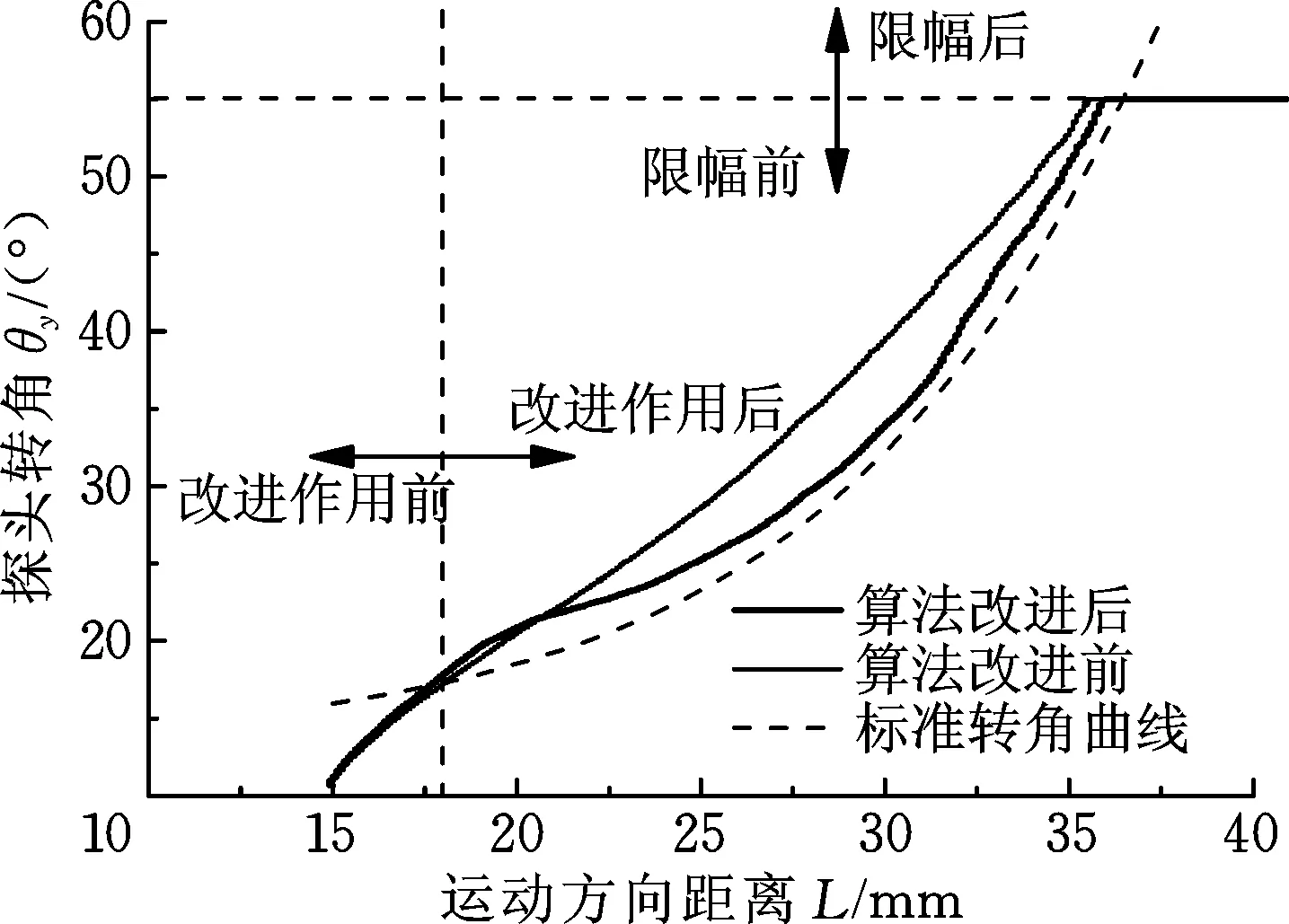
利用改進(jìn)前后的算法分別進(jìn)行實(shí)驗(yàn)并采集超聲探頭的實(shí)時(shí)轉(zhuǎn)角同標(biāo)準(zhǔn)曲線對(duì)比,如圖14所示。其中,圖14a顯示了一次掃描過(guò)程 (取掃描角度為270°) 中,算法改進(jìn)前后的實(shí)時(shí)轉(zhuǎn)角和標(biāo)準(zhǔn)轉(zhuǎn)角的關(guān)系。由于歷史軌跡點(diǎn)需要一定的累積,因此只有在掃描進(jìn)行一段時(shí)間后改進(jìn)算法才真正起作用,從圖14a中可以看出,在改進(jìn)作用后轉(zhuǎn)角曲線才出現(xiàn)明顯差別;另外,出于安全的考慮,會(huì)限制超聲探頭的最大轉(zhuǎn)角不超過(guò)55°,即圖14a中的轉(zhuǎn)角不會(huì)超過(guò)該值。圖14b所示為一輪共計(jì)8次掃描下,算法改進(jìn)前后實(shí)時(shí)轉(zhuǎn)角與標(biāo)準(zhǔn)轉(zhuǎn)角的均方差。由圖14b可以看出,當(dāng)曲面較為平坦(掃描角度為90°處)時(shí),算法改進(jìn)前后的轉(zhuǎn)角跟蹤效果均較佳;而改進(jìn)后的算法在不同曲率的曲面下,都使得轉(zhuǎn)角跟蹤效果進(jìn)一步提高,但在曲面較為復(fù)雜(掃描角度為0°和225°處)時(shí)效果提高幅度不大。整體上來(lái)說(shuō),僅使用力控方法基本能滿足標(biāo)準(zhǔn)轉(zhuǎn)角的變化趨勢(shì),而改進(jìn)后的算法在轉(zhuǎn)角跟蹤上有了更為顯著的提高,使得平均轉(zhuǎn)角跟蹤誤差從4.9°下降到2.2°。
4.4 乳腺體模掃描
對(duì)乳腺體模進(jìn)行一輪掃描,包括共計(jì)8次獨(dú)立掃描,其中掃描過(guò)程如圖15所示。可以看到掃描過(guò)程中超聲探頭能夠很好地緊貼乳腺體模,進(jìn)一步說(shuō)明了所提控制算法的有效性。

圖15 乳腺體模的掃描情況
4.5 人體活體掃描
對(duì)人體進(jìn)行一輪掃描,包括共計(jì)8次獨(dú)立掃描,掃描過(guò)程如圖16a所示,掃描過(guò)程的超聲圖像如圖16b所示。超聲圖像采用了偽彩,使得觀察掃描過(guò)程中組織的變化變得更加清晰。圖16b中,隨著超聲探頭的運(yùn)動(dòng),掃描得到的組織變化也清晰可見(jiàn),而且基本覆蓋整個(gè)乳腺,證明使用本文算法時(shí)超聲掃描的完整性。

(a) 在人體活體上的一輪掃描
5 結(jié)論
本文以間距l(xiāng)z和轉(zhuǎn)角θy為控制變量,建立了基于阻抗控制的掃描算法,同時(shí),提出了轉(zhuǎn)角估計(jì)的新方式以改進(jìn)算法的轉(zhuǎn)角跟蹤性能,從而解決了機(jī)器人輔助超聲掃描中皮膚曲面貼合的問(wèn)題。根據(jù)乳腺體模掃描和人體活體掃描兩類(lèi)實(shí)驗(yàn)結(jié)果,可以得出以下結(jié)論:
(1)不同掃描速度u下的數(shù)據(jù)點(diǎn)聚集在較小的范圍內(nèi),u對(duì)運(yùn)動(dòng)阻力FR和法向接觸力FN之間關(guān)系的影響較小。
(2)所建立的阻抗控制方法可以通過(guò)調(diào)整控制參數(shù)來(lái)達(dá)到恒力跟蹤的效果,即達(dá)到允許誤差范圍內(nèi)的振蕩穩(wěn)定。
(3)所提出的轉(zhuǎn)角估計(jì)新方式顯著提高了算法在轉(zhuǎn)角跟蹤上的效果。
(4)人體活體掃描實(shí)驗(yàn)驗(yàn)證了控制算法的完整性,證明了該算法應(yīng)用于臨床的可行性。后續(xù)改進(jìn)工作可考慮引入超聲圖像反饋?zhàn)鲞M(jìn)一步優(yōu)化。
猜你喜歡
作文·小學(xué)低年級(jí)(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂(lè)作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(jí)(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(jí)(2023年3期)2023-04-29 00:00:00
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
