基于Cruise純電動手動擋汽車的動力性、經濟性換擋淺析
2021-03-03 17:48:57張文超張海波
時代汽車 2021年2期
關鍵詞:經濟性
張文超 張海波

摘 要:為了更加準確的計算純電動手動擋汽車的動力性、經濟性,利用Cruise軟件分類搭建模型,優化手動變速器的換擋車速,通過對計算后的數據對比分析,得到更精確的計算結果。
關鍵詞:純電動汽車 動力性 經濟性
Research on Pure Electric Manual Transmission vehicles of Dynamic Performance and Economy Performance by Cruise
Zhang Wenchao Zhang Haibo
Abstract:In order to calculate more accurately the dynamic performance and economy performance of pure electric manual transmission vehicles, the article used the cruise software classification to build the model and optimize the speed of the manual transmission, and more accurate calculation results were obtained through comparative analysis of the calculated data.
Key words:BEV, dynamic performance, economy performance
1 前言
汽車的動力性與經濟性一直是汽車性能研究方向,如何提高汽車的動力性與經濟性,降低汽車的能量消耗率,是一個長期不變的話題。我國在“十三五”規化中明確指出純電動汽車是未來我國汽車發展的方向,在純電動汽車的研究中,利用多擋變速器擋位的變化,使純電動汽車電機盡量處于恒定扭矩的高效區工作,同時明顯降低電機對高轉速的要求,不僅符合電機扭矩與轉速特性,而且降低電機的能量消耗率,改善汽車的動力性與經濟性,因此,多擋變速器是未來純電動汽車的發展方向之一。而手動變速器已經在燃油汽車上得到了驗證,技術成熟可靠、價格低廉、經濟實用,本文所述為基于Cruise軟件的純電動汽車匹配5擋手動變速器仿真計算,通過對手動變速器換擋規律進行優化,得到更加合理的動力性、經濟性換擋車速,使得仿真計算的結果更加精確。
2 Cruise模型搭建及計算理論基礎
2.1 模型搭建及技術路線:
本次我們研究的是一款純電動手動擋轎車。該車是將原車型的單檔減速器替換為5檔手動變速器,并匹配額定功率25kW,最高轉速6000rpm的驅動電機。通過離合器實現手動換擋時動力系統與傳動系統的柔性結合,從而滿足變速器多擋手動的工作狀態,以達到車輛的使用要求。基于此原理,利用Cruise軟件,在原有單擋減速器純電動汽車的模型的基礎上重新設置電機參數,減少單擋減速器模塊,增加5擋手動變速器及離合器模塊,同時,修改模型中的cockpit駕駛艙模塊中的換擋模式及離合器踏板行程參數,建立純電動手動擋汽車模型,具體如下:
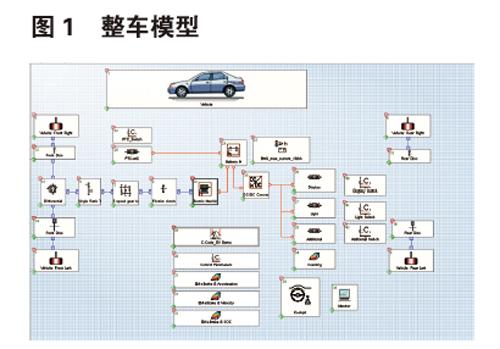
2.1.1 減少原有動力整車模型中的單檔減速器模塊,增加5擋手動變速器及離合器模塊,輸入相關參數(圖1-4);
2.1.2 修改cockpit駕駛艙模塊中的換擋模式,改為manual手動模式,增加離合器踏板行程參數(圖5、圖6);
2.1.3 修改電機參數,輸入25kw電機參數(圖7、圖8);
2.1.4 修改因上述增減模塊所產生的通訊信號,增加離合器及手動變速器信號連接(圖9);
2.2 計算理論基礎:
根據Cruise軟件users guide中5.1.5.7.
Resistance Forces介紹的阻力理論基礎,結合《汽車理論》可知[1 5]:
汽車的的行駛力平衡方程為:
其中:Ft汽車受到的阻力合力、Ff為滾動阻力、Fi為坡道阻力、Fw為風阻、Fj加速度阻力;
式中:α為坡度(°)、δ為汽車旋轉質量換算系數、m整車總質量。
由汽車在路面上行駛的受力分析及汽車滑行的運動工況可知,汽車在平直良好的路面滑行時,若忽略摩擦,則行駛阻力只有滾動阻力Ff,空氣阻力Fw,加速度阻力Fj,并且滑行過程中,純電動汽車處于空檔狀態,動力總成無有效的輸出,故整車的力平衡方程為[3]:
上述公式即為汽車空檔滑行狀態下的阻力方程,系數Ca、Cb、Cc為別為方程的常數項、一次項、二次項系數。
依據GB 18352.6-2016《輕型汽車污染物排放限值及測量方法(中國第六階段)》中,附件CC有關道路載荷的試驗方法,得到車型的汽車阻力方程各項系數:
由cruise軟件的理論基礎可知,當選擇考參車輛的阻力方程時[5]:
其中:為實際車輛質量、參考車輛質量、為實際車輛的風阻系數、為參考車輛的風阻系數、為參考車輛迎風面積。
故本次整車阻力設置采用:參考車輛阻力函數(driving resistance:function with reference vehicle)如圖10、圖11[6? 7]:
2.3 整車的基本參數:
3 Crusie軟件的仿真設置及仿真計算
3.1 仿真分析工況內容:
依據GB/T 18385-2005《電動汽車 動力性能 試驗方法》、GB/T 18386-2005《電動汽車? ?能量消耗續駛里程 試驗方法》、GB/T 28382-2012《純電動車乘用車 技術條件》標準規定:
純電動汽車的動力性指標主要有:最高車速Vmax、加速時間t、汽車的最大爬坡度imax;
純電動汽車的經濟性指標主要有: 能量消耗率、續駛里程km(NEDC、等速法、WLTC);
本文研究純電動手動擋汽車的動力性分析:加速度、0-50km原地起步加速時間和50-80km加速時間三個指標。通過對加速度與加速時間的計算,優化車型的手動換擋規律與車速,使手動換擋更加平順,車輛加速時動力性更強,計算加速時間更精確。
對其經濟性分析時,采用NEDC、等速法進行對比分析。通過對比分析找到最佳經濟性換擋規律與換擋車速,獲取車型最理想狀態下的續駛里程和能量消耗率。
3.2 Cruise軟件的計算任務簡介:
Cruise軟件的task folder任務文件夾中,可增加相關的計算任務,包括:
Cycle run(循環運行)
Climbing performance(爬坡性能)
Constant drive(穩態性能)
Full load acceleration (滿負荷加速)
Maximum traction force(最大牽引力)
Cruising(巡航)
Brake/Coast/Thrust/(制動/滑行/反拖)
通過上述計算任務,可滿足純電動汽車的動力性與經濟性的各項指標計算。
3.3 仿真計算設置考慮的因素:
利用Cruise軟件在計算純電動汽車的動力性與經濟性時,應考慮以下幾個因素:
a)動力性計算與動濟性計算時,動力總成的輸出需求不同,需要根據動力性與經濟性分別考慮,為此,我們將模塊進行分系統搭建然后組合,分為performance與economy兩個模型,根據計算任務選擇不同類型的模型(圖12、圖13)。
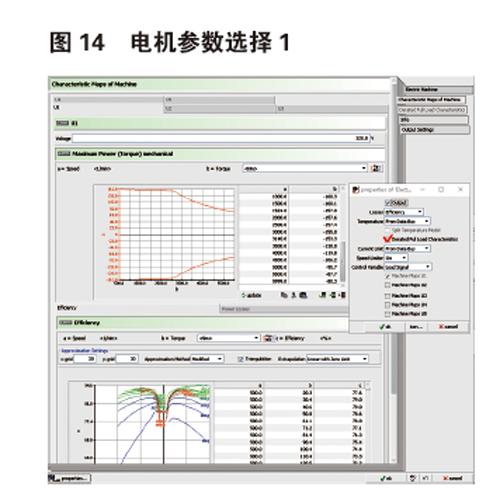
b)同時,在電機的properties選項中,將Derated Full Load Characteristics分為打開與關閉,以區別電機在動力性與經濟性時的不同輸出(圖14、圖15)。
c)由于更換傳統汽車的5檔手動變速器和離合器后,在計算動力性時,需要考慮手動變速器的最佳換擋規律, Crusie軟件中,自帶有標準的換擋車速與駕駛員換擋模式,可從計算任務設置下的driver設置欄找到相關設置,如(圖16、圖17)[6? 7]:
3.4 動力性換擋仿真計算:
3.4.1 確定換擋車速的合理性:
采用上述設置首先建立Full load acceleration (滿負荷加速)任務,計算出0-100Km加速度,如圖(圖18):
在Cruise軟件可編輯圖表模版將速度、加速度、當前檔位數據導入生成曲線,分析發現,采用標準換擋車速換擋時,軟件默認的換擋時間為0.3秒,3擋換4檔加速度下降異常,波動較大,換擋不平順,且與其它檔位在換擋點的曲線明顯不同,說明采用標準換擋車速換擋在計算本模型的動力性指標0-100km的加速時,不適合本模型要求。如圖18:
3.4.2 動力性換擋點的選擇原理:
我們在對動力性計算時,動力性換擋規律是指:取同一加速踏板開度下,相鄰擋位加速度相等的交點作為換擋點,此換擋點能使汽車具有最大驅動加速度,由此而制定的換擋規律即為本次研究的動力性換擋規律。
式中:un、un+1分別為同一加速踏板開度下n、n+1擋的速度(圖19)。
從此模型電機滿負荷曲線可以看出,電機的恒扭矩區近似為3000rpm以下,恒功率區近似為3000-6000rpm。
對于純電動汽車,驅動電機輸出轉矩與加速踏板開度和當前驅動電機轉速有關,其輸出表達式為[2]:
式中,Ta(α,na)為驅動電機輸出轉矩,α為加速度踏板開度,na為驅動電機輸出轉速;Tmax為驅動電機輸出最大轉矩,Pmax為驅動電機峰值功率,上式描述了加速踏板開度、電機輸出轉速及輸出轉矩關系。
3.4.3 動力性換擋點的計算:
根據上述理論,將加速踏板開度及各檔車速、加速度作為三參數換擋的控制條件,我們的計算任務為電機在最大工況下的動力性,故利用Cruise軟件的Full load acceleration (滿負荷加速)任務計算換擋點時,加速踏板的開度設為100%定值,各擋加速度-車速曲線的交點為最大驅動加速度交點,即動力性換擋點,如(圖20、圖21):
導出加速度、速度曲線數據,用離散的數據點擬合線性方程[3],求解交點數值,作為變速器各檔升擋點車速,再根據傳統變速器換擋規律降擋曲線制定方法,采用等距法將升擋曲線左移5km/h,以避免循環換擋,得到降擋點的換擋車速:
將動力性換擋點車速導入計算任務中,通過結果對比分析,如下圖,可以看出優化后換擋車速下,3擋到4擋的換擋時間比以前有所減少,且換擋平順很多(圖22、圖23)。
從計算結果可以看出,0-50km加速時,優化換擋車速后,加速時間減小0.41s,50-80km加速時,加速時間減小0.19s。在實際的日常駕駛中,駕駛員的習慣操作、離合踏板松開時間,手動換擋時間等對整車的加速度也有一定的影響,本次仿真計算采用了Cruise軟件推薦的標準駕駛員參數,只是對換檔點的車速進行優化,計算結果可做為駕駛員換檔提示數據的輸入和整車其它動力性指標計算時的換擋車速輸入。
3.5 經濟性換擋仿真計算:
3.5.1 經濟性換擋點的選擇原理:
經濟性換擋是指:在車速-電機效率曲線中,在某一加速踏板開度下,將相鄰兩擋電機效率曲線的交點中,最高的效率曲線交點作為換擋點,此換擋點為電機具有最大效率的車速點,由此而制定的換擋規律即為本次研究的經濟性換擋規律。利用已知驅動電機效率特性曲線,通過計算可得到電動汽車車速-電機效率曲線圖,從而制定出汽車的經濟性換擋規律。采用經濟性換擋后,整車主要運行在高擋位,增加了高擋位的運行范圍,從而降低了能量消耗。
首先,根據(圖24、圖25)已知電機效率數據,利用Constant drive(穩態性能)任務,將各擋位的速度,某一速度下加速踏板的開度,電機的效率等參數先期計算出來,如(圖26、圖27):
同上述動力性換擋點數據處理一樣,導出電機效率、速度曲線數據,用離散的數據點擬合線性方程[3],求解交點數值,作為變速器各檔升擋點車速,再根據傳統變速器換擋規律降擋曲線制定方法,采用等距法將升擋曲線左移5km/h,以避免循環換擋,得到降擋點的換擋車速:
3.5.2 經濟性換擋點的計算:
將經濟性換擋點車速導入NEDC、等速法計算任務中,計算結果對比分析,如(圖28、圖29、圖30、圖31):
從以上圖形中可以看出,采用Crusie軟件標準換擋車速,此時,等速法車速60km正好是標準換擋規律中3擋與2擋的降擋點,軟件計算的加速度數據此時近似為零(-1.2e-16m/s^2),此時由于軟件在仿真計算時有頻繁換擋趨勢,導致加速度頻繁有小的波動,從而影響了等速法的的續駛里程,而采用優化后的經濟性換擋車速,加速度曲線平順,等速法續駛里程增加11.55km。
將經濟性換擋點車速的計算結果可做為駕駛員手動換擋提示的數據輸入,從而增加整車在實際駕駛時的續駛里程。
4 結束語
利用Cruise軟件計算動力性與經濟性時,對不同的工況下的計算任務分類計算,對手動換擋點的分別優化,使得仿真計算的結果更加合理精確,通過前期的動力性、經濟性仿真計算,將優化后的換擋車速作為整車在路試或測功機上試驗時的標準換擋車速,能使試驗車輛換擋更加平順,路試結果更為合理,更能體現實驗車輛的實際動力性與經濟性。
參考文獻:
[1]余志生.汽車理論.5版[M]北京:機械工業出版社,2009:18-19;
[2]王盤,魯統利,巫少方,林連華,徐海港.微型純電動貨車兩擋AMT換擋規律研究[J].傳動技術:2017-31(4).
[3]陳春梅.滑行法確定底盤測功機加載數值研究[D] 長安大學:陜西西安,2009;15-16.
[4]陳巍.利用MATLAB曲線擬合工具箱求離散點的擬合曲線[J]. 中國科技論文在線,2010.
[5]AVL CRUISE\v2015\CRUISE_UsersGuide\index.html[CP]:5.1.5.7.
[6]AVL Cruise基礎培訓教程 [D] 李斯特技術中心(上海)有限公司.
[7]AVL cruise &matlab聯合仿真 [D] 李斯特技術中心(上海)有限公司.
猜你喜歡
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
能源工程(2021年6期)2022-01-06 02:04:36
汽車工程師(2021年11期)2021-12-21 06:23:12
建材發展導向(2021年15期)2021-11-05 08:21:08
建材發展導向(2021年15期)2021-11-05 08:21:04
中國資源綜合利用(2016年8期)2016-01-22 07:29:29
四川電力技術(2015年5期)2015-12-19 11:04:54
減速頂與調速技術(2015年4期)2015-03-16 03:39:41
中國工程咨詢(2015年2期)2015-02-14 02:59:22