汽車操縱穩定性試驗與評價標準研究
2021-03-05 00:00:56張凱軒霖ZhangKaixuanXuLin
北京汽車 2021年1期
張凱軒,徐 霖Zhang Kaixuan,Xu Lin
汽車操縱穩定性試驗與評價標準研究
張凱軒,徐 霖
Zhang Kaixuan,Xu Lin
(上海機動車檢測認證技術研究中心有限公司,上海 201805)
操穩性能的優劣直接影響駕駛的感受,更關乎高速行駛時的安全性和穩定性。研究和評價車輛操穩性的直接方法是實車試驗,通過總結梳理各類試驗與評價標準,查閱汽車操穩試驗與評價方法的最新國內標準及ISO標準,分析國內相關標準的現狀,以及對比ISO標準存在的優勢和缺點,為完善我國汽車試驗的標準體系提供參考。
汽車操縱穩定性;試驗方法;標準
0 引 言
汽車操縱穩定性[1]是指操作人員在自然舒適狀態下,汽車可以按照指示行駛,并保持穩定的能力。操穩性能的優劣直接影響駕駛感受,更關乎高速行駛時的安全性和穩定性[2],研究和評價車輛操穩性的直接方法是實車試驗。
劉文蘋[3]等列舉了國內外汽車操穩試驗方法的標準,并指出國內標準的不完善之處;張志國[4]等基于開、閉環系統分析了國內外汽車操穩測評標準體系現狀;劉杰[5]等指出了國內相關評價標準的不合理之處,并給出了一種可能的新型評分方法。
上述研究較為系統地總結了國內外關于汽車操穩試驗與評價方法的各標準,分析了國內標準的不足之處,并提出了合理化改進建議。在此基礎上,查閱了汽車操穩試驗與評價方法的最新國內標準及ISO標準,分析國內相關標準的現狀,以及對比ISO標準存在的優勢和缺點,為今后完善我國汽車的標準體系提供參考。
1 汽車操縱穩定性試驗方法
20世紀70年代,ISO(International Organization for Standardization,國際標準化組織)率先起草制定了一系列測試汽車操穩性的標準。我國立足國內情況并參考國際標準,于1986年制定了國標《汽車操縱穩定性試驗方法》,此國標包含6項:GB/T 6323.1~6323.6—1986;1994年對此國標進行了修訂,形成GB/T 6323.1~6323.6—1994;2014年將6項標準合并,并增加了一項新的試驗內容,形成GB/T 6323—2014,這是我國當前測試汽車操穩性能的主要依據,其中規定了7個試驗方法。下面分別對7個試驗方法及相應的ISO標準進行介紹和對比。
1.1 蛇行試驗[6,7]
蛇行試驗是指操縱汽車穿行標樁[13]24。該試驗依賴于試驗人員的駕駛技巧和主觀感受,是一種人—車閉環試驗方法。國標規定汽車以1/2基準車速通過試驗區段,采集相關參數,并記錄駕駛員的主觀評價,試驗路徑如圖1所示。

圖1 GB/T 6323—2014中蛇行試驗路徑
目前ISO沒有制定蛇行試驗的相關標準,但制定有針對緊急變道試驗的標準ISO 3888-1:2018,其試驗路徑如圖2所示。
該試驗模擬汽車緊急情況下迅速變道并回到原來車道的過程,也是一種閉環試驗方法。該標準最早將通過測試路徑的時間作為試驗唯一的評價標準,但在不同國家進行大量試驗后發現采用這個單一的評價標準并不充分,駕駛員、車輛、環境要素之間相互作用十分復雜,車輛縱向動力學、測量值與主觀評價的相關性、不同的測試路徑等都會導致結果數據分散;基于此,ISO 3888-1:2018在附錄中建議了2種測試方法,其中不同之處是進入速度分別為80 km/h和最高安全速度,共同之處是試驗過程中均需保持節氣門恒定,并記錄轉向盤輸入和車身運動參數的時間歷程、駕駛員控制策略及主觀評價。

圖2 ISO 3888-1:2018緊急變道試驗路徑
目前,蛇行試驗作為一種主流的試驗內容,在國內汽車廠商及汽車測評機構得到了廣泛應用。
1.2 階躍輸入、脈沖輸入轉向瞬態響應試驗[6,8]
轉向瞬態響應是指改變轉向盤輸入后汽車的中間過渡過程[13]25。不同的轉向角輸入方式可以得到時域或頻域響應特性。ISO 7401:2011將轉向盤輸入方式分為5種:階躍輸入、單正弦波輸入、隨機輸入、脈沖輸入、連續正弦波輸入,其中,前2種能夠獲得時域特性,后3種能夠獲得頻域特性。
GB/T 6323—2014采用階躍輸入和脈沖輸入2種方法。在階躍輸入方式下,按照使車輛產生不同的穩態側向加速度值來預選相應的轉向盤轉角位置;然后車輛以規定車速平直向前行駛,通過迅速轉動轉向盤(轉動時間在0.2 s內或轉動速度超過200 °/s)使其達到預先選好的位置并固定數秒鐘,直至測量變量過渡到新穩態值。在脈沖輸入方式下,轉向盤的轉角輸入為三角波脈沖,脈寬為0.3~0.5 s,輸入峰值應使試驗過程中車輛的側向加速度峰值達到4 m/s2。這2種試驗均需要進行向左轉與向右轉試驗,試驗過程中需保持車速為一常數并記錄全程的測試參數。
國標與ISO標準對比見表1。可以發現,兩項標準的基本內容大體一致,存在一些細微的差別:

表1 瞬態響應試驗標準對比
注:①v為縱向速度;②—為無此項;③由橫擺角速度峰值響應時間乘以穩態汽車側偏角得到。
(1)標準的適用范圍、試驗車速存在表述差別;(2)ISO標準中車輛載荷狀態增加了“其他需要的載荷狀態”;(3)測量參數表述不同,國標中汽車前進速度、側向加速度分別對應ISO標準中縱向速度、橫向加速度;(4)測量參數的內容不同,國標比ISO標準增加了車身側傾角和汽車側偏角2個參數;(5)測量參數的范圍和誤差要求不同,國標對轉向盤轉角和橫擺角速度的誤差要求更嚴苛,ISO標準對縱向速度的誤差要求更嚴苛;(6)計算技術指標有一些不同。
1.3 轉向回正性能試驗[6,9]
轉向回正性能試驗是指駕駛汽車轉彎時釋放雙手,在轉向盤回歸中間位置的振蕩過程中,記錄各變量的動態過程[13]24。國標試驗方法分為低速和高速2種,后者針對最高行駛速度不低于100 km/h的車輛。
低速試驗時,汽車沿直徑為30 m的圓環路線行駛,設置前進速度,使側向加速度值為(4±0.2)m/s2并保持穩定;然后迅速釋放雙手,使轉向盤自由振蕩,記錄雙手離開轉向盤4 s以后汽車的動態變化,保持節氣門開度處于同一位置。高速試驗時,汽車以試驗規定速度行駛,轉動轉向盤,使側向加速度值為(2±0.2)m/s2并保持穩定;之后迅速釋放雙手,使轉向盤自由振蕩,記錄雙手釋放4 s以后的動態變化,整個過程中加速踏板位置保持不變。
國標和ISO標準對比見表2。可以看出,除了標準適用范圍、車輛載荷狀態、測量參數表述、內容、范圍及誤差不同外,最大的區別在于試驗車速和計算技術指標。國標針對汽車最高車速不同規定了不同的試驗車速,ISO標準規定了統一的標準縱向速度;國標和ISO標準采用完全不同的計算技術指標,國標的計算指標反應響應與穩態值間的關系,ISO標準的計算指標著重分析響應的前兩個峰值。另外,國標著重分析橫擺角速度這一參數,ISO除了分析橫擺角速度,還分析轉向盤轉角及橫向加速度。
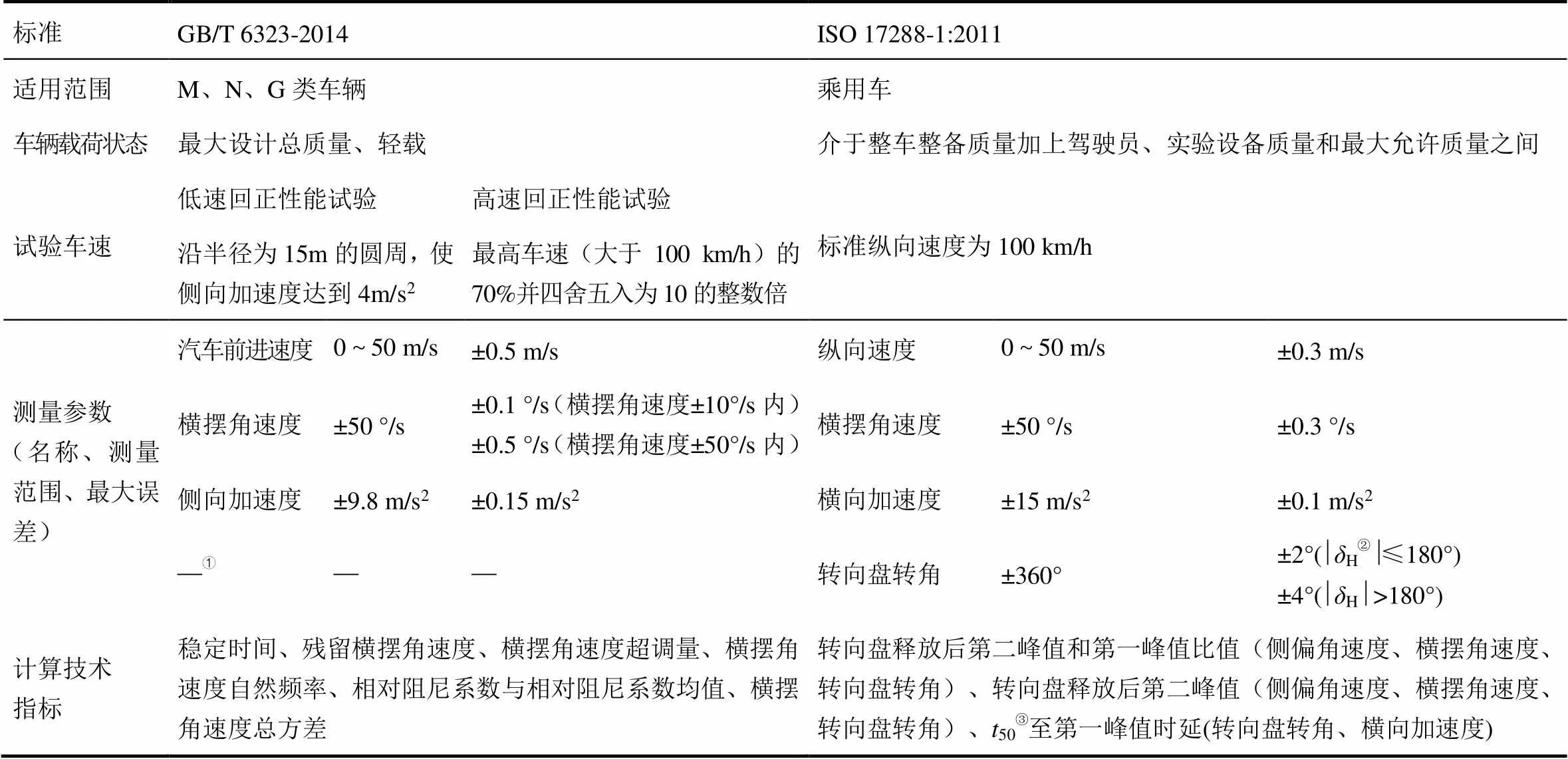
表2 轉向回正性能試驗標準對比
注:①—為無此項;②H為轉向盤轉角;③50為轉向盤釋放后其轉角首次衰減至初始值50%的時刻。
1.4 轉向輕便性試驗[6]
轉向輕便性是指汽車低速轉彎時手打轉向盤的難易程度,采用轉向力進行量化分析。
國標規定試驗人員轉動轉向盤使汽車以(10±2)km/h的車速沿圖3所示的雙紐線試驗路徑行駛,圖3中16個黑點位置擺放標樁。汽車沿實線路徑行駛一圈即為一次試驗的全程,整個過程中記錄汽車各測量參數,保持車輛速度恒定。試驗人員需要連續平穩地轉動轉向盤,不應同時釋放雙手或反復操作轉向盤來調整汽車前進方向,更不允許將標樁碰倒。
目前,ISO并未制定關于轉向輕便性的試驗標準。

圖3 雙紐線路徑
1.5 穩態回轉試驗[6,10]
穩態回轉試驗是指汽車沿圓弧線路行駛并使其側向加速度達到一定值,記錄各測量參數,對汽車的轉向特性進行分析和評價。根據保持圓弧線路半徑不變或保持轉向盤位置不變,國標規定了2種試驗方法:(1)汽車沿直徑為60 m的圓弧路徑勻速行駛,逐步提高車速,使車輛側向加速度緩慢增加到一定值,采集全過程的參數值;(2)汽車沿圓弧度路徑行駛并維持轉向盤位置不變,使車輛側向加速度緩慢增加到一定值,采集全過程的參數值。 ISO提供了第3種試驗方法:保持車速不變,車輛沿著不同半徑圓弧轉彎,使橫向加速度增加至極限。
國標與ISO標準的對比見表3。可以看出,兩者除了在適用范圍、車輛載荷狀態、測量參數表述、范圍及誤差有區別之外,在測量內容上,國標給出了必須測量變量和希望測量變量,ISO標準統一為測量變量,并且后者比前者增加了轉向盤轉角及扭矩2個測量參數;在測試方法上,后者比前者增加了固定車速法;在計算技術指標上,前者比后者增加了前后軸側偏角差值、中性轉向點的側向加速度2個指標。

表3 穩態回轉試驗標準對比
注:①—為無此項;②v為縱向速度;③d/dt為橫擺角速度;④H為轉向盤轉角;⑤H為轉向盤轉矩。
1.6 轉向盤中心區操縱穩定性試驗[6,11]
轉向盤中心區操穩試驗是指車輛速度非常高時,汽車沿直線行駛過程中的轉向特性[13] 22。GB/T 6323—2014和ISO 13674-1:2010均對該項試驗作出規定。
國標規定,在試驗標準車速下,轉向盤的輸入為振蕩型輸入,優先選擇正弦波,也可采用其他波形(如三角形波);在試驗的全部過程中,轉向盤的轉動幅值以及經過中心區域的速度應保持相同,加速踏板位置或節氣門開度應保持恒定;試驗中的轉向輸入可利用人工或轉向機器人來完成,對于人工轉向輸入采集至少持續40 s,對于機器人轉向輸入采集至少持續20 s。將采集到的測量參數繪制于直角坐標系中,得到關系曲線,由關系曲線計算出相應的技術指標。
ISO標準與國標的內容基本一致,不再贅述。
2 汽車操縱穩定性評價方法[12]
汽車操穩性評價可以分為主、客觀方法。前者依據人的感受進行評價,后者是采用試驗得到的各種參數進行評價。開環系統試驗(轉向瞬態響應試驗、轉向回正性能試驗、轉向輕便性試驗、穩態回轉試驗、轉向盤中心區域操縱穩定性試驗)只采用客觀評價;由人、車組成的閉環系統試驗(蛇行試驗)通常結合2種評價方法。
汽車服務于人,因此人的主觀感受應該是操穩評價的根本遵循。主觀評價方法因個體差異波動較大,并且不能指明某種感受是由汽車的何種結構引起,無法幫助提高汽車的操穩性能。目前國內外都沒有采用主觀方法評價汽車操穩性的相關標準。
客觀評價參數的選取,由試驗工程師經過長期測試和驗證確定。這些參數不僅反映人的感覺,并且易于測試獲得、便于對比分析,幫助工程師進行結構參數設置,提高汽車的性能。
目前,國內主機廠主要依據QC/T 480—1999對汽車的操穩性綜合評分;ISO沒有制定相關標準對各項操穩試驗得到的指標給出限值或評分方法。QC/T 480—1999針對國標中規定的前6項試驗,依據各試驗的特征指標計算出各自的評價分數,將6項評價分數的平均值作為汽車操穩性總體評價的得分,總體評價得分不足60分判定為不及格。
3 總 結
通過梳理汽車操穩試驗與評價方法的最新國內標準及ISO標準,得出以下結論:
(1)國內主機廠采用的汽車操穩試驗方法主要依據GB/T 6323—2014,該標準規定了7個試驗方法;ISO對不同試驗制定了單獨的標準;國標與ISO標準在試驗項目上互有優勢,國標制定了ISO標準沒有的蛇行試驗、轉向輕便性試驗,ISO制定了國標沒有的測試轉彎制動、側風穩定性等試驗標準。
(2)對于國標與ISO標準都設置的試驗項目,兩者基本內容一致,但在標準的適用范圍、試驗車速、車輛載荷狀態、測量參數的表述、內容、范圍和誤差、計算技術指標等方面存在差別。
(3)鑒于主觀評價的復雜性,目前國內外都未制定主觀評價汽車操穩性的相關標準;針對客觀評價,國內主機廠主要依據QC/T 480—1999對汽車操穩性綜合評分,ISO并未制定相關標準。
(4)汽車操穩評價標準應隨著汽車技術的進步不斷更新,QC/T 480—1999發布至今已有二十多年,版本長久未更新,標準中總評價得分采用簡單加總平均方式,沒有區分不同試驗的重要性,使評價標準的合理性受到一定質疑[5] 20。
[1]余志生. 汽車理論:第5版[M]. 北京:機械工業出版社,2009.
[2]曹建永. 基于人—車—路閉環系統的汽車操穩試驗及評價方法研究[D]. 上海:上海交通大學,2015.
[3]劉文蘋,巢凱年,李平飛. 汽車操縱穩定性試驗方法國內外標準對比[J]. 四川工業學院學報,2004,23(3):7-9.
[4]張志國,梁榮亮,王久明,等. 基于開、閉環控制的車輛操穩測評標準體系研究[J]. 上海汽車,2014(2):54-57.
[5]劉杰,萬里翔,王波. 乘用車操縱穩定性評價方法的研究[J]. 汽車科技,2016(3):18-24.
[6]中華人民共和國國家質量監督檢驗檢疫總局,中國國家標準化管理委員會.汽車操縱穩定性試驗方法:GB/T 6323—2014[S].北京:中國標準出版社.
[7]ISO.Passenger cars — Test track for a severe lane-change manoeuvre — Part 1:Double lane-change: ISO 3888-1 [S].2018.
[8]ISO.Road vehicles — Lateral transient response test methods — Open-loop test methods :ISO 7401:2011[S].2011.
[9]ISO.Passenger cars — Free-steer behaviour — Part 1:Steering-release open-loop test method: ISO 17288-1:2011[S].2011.
[10]ISO.Passenger cars — Steady-state circular driving behaviour — Open-loop test methods: ISO 4138:2012[S].2012.
[11]ISO.Road vehicles — Test method for the quantification of on-centre handling — Part 1:Weave test: ISO 13674-1:2010 [S].2010.
[12]國家機械工業局. 汽車操縱穩定性指標限值與評價方法: QC/T 480—1999[S].1999.
[13]中華人民共和國國家質量監督檢驗檢疫總局. 汽車操縱穩定性術語及其定義:GB/T 12549—2013[S]. 北京:中國標準出版社,2014.
U461.6
A
10.14175/j.issn.1002-4581.2021.01.001
1002-4581(2021)01-0001-05
2020-10-10
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
石油瀝青(2021年4期)2021-10-14 08:50:44
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
專用汽車(2016年4期)2016-03-01 04:13:43
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
決策探索(2014年21期)2014-11-25 12:29:50
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51