鍋爐筒節匹配算法系統設計和實現
2021-03-15 02:29:10余蕓
自動化儀表 2021年1期
余 蕓
(上海工業自動化儀表研究院有限公司,上海 200233)
0 引言
目前使用的筒節匹配算法,主要是在要匹配的筒節端面上選取幾個常用的點,工人手工測量該點所處端面的直徑;測量完成后,依據經驗,對相近的筒節進行焊接。顯然,這種方法還是比較“粗放的”,主要依靠工人的經驗完成,所選取的測量點與測出的直徑值有一定的誤差。
隨著近年制造執行系統(manufacturing execution system,MES)在工廠應用的普及,鍋爐筒節匹配需要往智能化方向發展,并提供便捷的查詢方法。本文根據鍋爐筒節多測點的特點,利用激光測距儀、平板計算機,設計了一套能精確進行筒節匹配的系統。
1 系統總體設計
根據筒節匹配算法的特點,本系統主要包括激光測距儀、平板計算機、MES服務器及客戶端等部分。激光測距儀主要用于測量筒節端面直徑,并通過藍牙向平板計算機傳遞數據。平板計算機用于接收激光測距儀的數據,并通過WiFi傳遞給MES服務器。MES端服務器接收完數據,通過一系列匹配算法,把筒節匹配順序通過網頁形式展示給用戶。系統結構圖如圖1所示。

圖1 系統結構圖
2 平板計算機軟件設計
平板計算機程序流程如圖2所示。

圖2 平板計算機程序流程圖
2003年,Android系統開始研發。2007年,Android 1.0上線。2018年,Android P測試版發布。經歷短短15年發展,目前Android系統在智能手機市場的占有率高達90%以上[1-3]。為此,本系統采用Android studio作為開發工具,開發一款作為中間站作用的應用程序(application,APP)。Android studio作為谷歌官方推薦的開發工具,與eclipse開發平臺相比,具有更高的開發效率[4]。
系統采用JAVA作為開發語言,以數據自動錄入為核心[5],實現數據采集、數據傳輸、數據處理等功能。系統主要包括五個模塊:用戶登錄模塊、藍牙通信模塊、數據保存模塊、數據顯示模塊、數據傳輸模塊。這些模塊協同工作,完成APP數據采集和傳輸任務。系統工作流程如下。首先,平板計算機和激光測距儀的藍牙功能同時開啟并能互相找到對方;然后,平板計算機接收激光測距儀發來的測距數據,保存在一個數組中;當一個筒節的兩個端面的直徑都測量完畢后,再將這組數據通過WiFi發送給MES服務器。MES服務器接收到數據后發送一個數據給平板計算機表示數據已經接收到,可以準備發送下一組數據。如果平板計算機超過一定的時間未收到反饋值,則重新發送數據給MES服務器。
3 鍋爐激光對中軟件設計
鍋爐激光對中軟件設計是整個系統設計的核心,由通信程序、匹配算法程序、界面顯示程序等部分組成。系統首先接收平板計算機傳來的數據,并把它保存在數據庫中。然后,根據工號和筒節編號,從數據庫中取出相應筒節兩個端面的直徑數據,進行匹配計算。
計算完成后,在界面上顯示出匹配結果,并列出匹配角度。
3.1 MES端匹配計算算法
MES端匹配計算算法是軟件設計的關鍵部分。筒節橫截面的測量點設置如圖3所示。
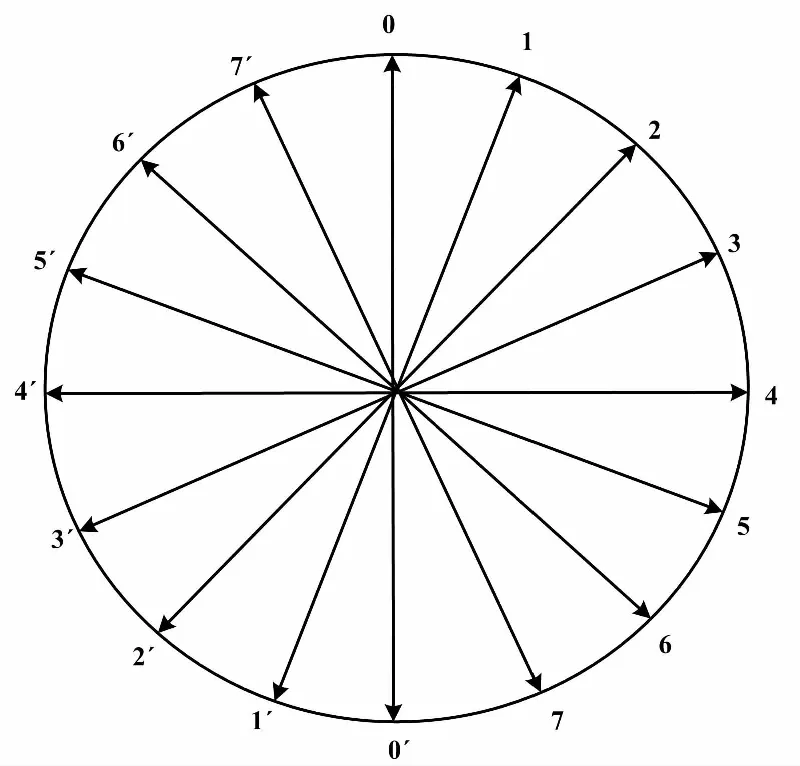
圖3 筒節橫截面的測量點設置圖
兩個筒節的匹配流程如圖4所示。

圖4 兩個筒節的匹配流程圖
具體的算法如下。以焊接縱縫線為0點,依次取7個點,分別測量直徑。假設t0是0點位置測得的直徑、t1是1點位置測得的直徑,以此類推,t7是7點位置測得的直徑,則t0,t1,…,t7是第一個筒節所測得的所有直徑值。
類似地,w0是 0點位置測得的直徑、w1是 1點位置測得的直徑,以此類推,w7是7點位置測得的直徑,則w0,w1,…,w7是第二個筒節所測得的所有直徑值。
由于0和0′是一直線,測得的直徑長度是一樣的,即t0=t0′,t1=t1′,…,t7=t7′;w0=w0′,w1=w1′,…,w7=w7′。
系統首先從第一個筒節的匹配面0點位置和第二個筒節的匹配面0位置處匹配,計算數值代表兩個筒節的8個內徑差值之和。
s0=(t0-w0)+ (t1-w1)+ (t2-w2)+…+
(t7-w7)
如果任意兩個位置的直徑差大于5 mm,例如t0-w0>5 mm,則表示這次匹配不成功,直接退出開始下一個位置的匹配。
下一個位置從第一個筒節匹配面的縱縫線0點位置與第二個筒節匹配面的1點位置處開始匹配,計算數值代表兩個筒節的8個內徑差值之和:
s1=(t0-w1)+ (t1-w2)+ (t2-w3)+…+
(t6-w7)+(t7-w0)
類似地,如果任意兩個位置的直徑差大于5 mm,表示匹配不成功。
按此規律匹配計算8次,最后一次計算值為第一個筒節匹配面的縱縫線0點位置與第二個筒節匹配面的7點位置開始匹配:
s7=(t0-w7)+ (t1-w0)+ (t2-w1)+…+
(t6-w5)+(t7-w6)
取s0,s1,…,s7的有效值進行排序,得出的最小值對應的匹配位置就是兩個筒節合適的匹配角度。為了防止應力集中,兩個筒節焊接縱縫線是不能焊接在一起的,要有一定的角度偏移。所以當得出的排序結果s0、s1或s2為最小值時,焊接位置為第一個筒節的0點位置和第二個筒節的0′位置、1′位置或2′位置。
3.2 多個筒節的排序算法
一個鍋爐至少要用3~4個筒節進行焊接。在選好要焊接在一起的筒節后,要對這些筒節按匹配算法循環進行匹配計算。對計算得到的最小值再次進行排序,得到筒節之間的匹配順序以及匹配角度。n個筒節要進行2×n×(n-1)次循環匹配。多個筒節的匹配流程如圖5所示。

圖5 多個筒節的匹配流程圖
3.3 鍋爐激光對中軟件實現
比起本地服務,Web Service服務具有平臺無關性、跨越防火墻以及編程語言無關性等優勢[5]。所以系統使用Tomcat服務器端進行MES的Web服務。采用JSON作為網絡傳輸協議[6-9],SQL Server作為數據庫存儲測量到的筒節直徑數據。MES端在進行與Android平臺的通信傳輸中,使用JSON進行數據封裝,創建Java Bean對象,把數據填充到對象中,轉為字符串進行傳輸。考慮到系統的安全性、穩定性和可維護性,本系統采用分層架構開發,可以降低層與層之間的耦合度,減少數據互相干擾。本系統架構分為數據層和應用層。
①數據層:即系統后端,采用SQL Server存儲數據。
②應用層:即系統前端,采用HTML實現靜態頁面的設計與布局;采用JavaScript 創建動態頁面效果并與后端進行數據交互。
本系統主要實現筒節信息顯示、匹配順序顯示和特定筒節匹配顯示三大功能模塊。
①筒節信息顯示:輸入工號信息后,根據工號查詢數據庫,得到該工號下的筒節編號以及每個筒節的兩個端面所測得的直徑數據。
②匹配順序顯示:選擇要匹配的筒節編號后(大于2根),系統顯示筒節的匹配順序、匹配面以及匹配的角度。
③特定筒節的匹配顯示:界面提供選擇筒節編號和匹配面的選項,用于查詢特定兩個筒節是否合適匹配以及匹配的角度。
該系統用到的數據庫表是筒節信息表,包含字段是工件編號、筒節編號、A0~A7(筒節A端面測得的8個直徑值)、B0~B7(筒節B端面測得的直徑值)。
4 系統測試
系統測試在鍋爐焊接車間進行。首先打開平板計算機,出現登錄界面;輸入正確的用戶名和密碼后,進入主界面。打開激光測距儀,同時開啟激光測距儀和平板計算機的藍牙功能,平板計算機會出現藍牙配對界面。
當激光測距儀和平板計算機藍牙配對成功后,平板計算機的控制軟件首先等待用戶輸入工號和筒節編號。輸入完成后,激光測距儀把測得的筒節的直徑值傳遞給平板計算機的控制軟件。平板計算機控制軟件接收到數據,并在界面顯示。當所有數據接收完成后,點擊發送按鈕,把數據發送給MES服務器,然后清空界面。
MES端接收到平板計算機傳來的數據,保存到數據庫中。首先,選擇工號,點擊查詢按鈕,界面會顯示
出該工號下所有的筒節編號以及每個筒節兩個端面所測得的所有直徑值。選擇要進行匹配的筒節編號,點擊匹配排序按鈕后,界面的匹配排序表格欄里會顯示適合進行匹配的筒節編號以及匹配的面,并列出每個角度的匹配計算得出的值。當用戶想要了解特定兩個筒節的匹配情況,可以在筒節選擇下拉框選擇要匹配的筒節,并點擊匹配按鈕,界面顯示兩個筒節每個角度按匹配算法計算出的值。
5 結論
系統采用激光測距儀測量筒節的直徑,以代替傳統的人工測量方法,減少了測量誤差;在Android系統上開發了平板計算機控制軟件,接收激光測距儀的數據并發送到MES服務器。服務器端采用Sping框架,開發了基于Java語言的激光對中軟件,接收平板計算機傳來的數據保存到數據庫中,用排序、尋求最小值等算法進行匹配計算,并把結果顯示在頁面上。該系統已經在鍋爐筒節車間進行現場測試,運行穩定,基本功能滿足設計要求,可降低匹配誤差,為進行筒節焊接的用戶提供參考,減少工作量。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
趣味(數學)(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2017年20期)2018-01-03 06:26:40
