自然駕駛工況下駕駛人腳操縱行為規律
2021-03-17 01:28:40黃秋菊馮樹民
哈爾濱工業大學學報 2021年3期
關鍵詞:踏板
黃秋菊,馮樹民,張 宇,趙 琥
(1.哈爾濱工業大學 交通科學與工程學院, 哈爾濱 150090; 2.哈爾濱職業技術學院 汽車學院, 哈爾濱 150081)
車輛行駛過程中,駕駛人為獲得期望速度并保證安全舒適行駛,需要不斷完成轉向盤操縱、轉向開關操縱、燈光開關操縱、空調或音響等控制面板操縱、換擋操縱、加速踏板操縱、制動踏板操縱等操縱行為. 其中加速踏板和制動踏板操縱等腳操縱行為直接決定車輛的速度和加速度,與安全行駛密切相關,因此有必要對駕駛人腳操縱行為規律進行研究. 同時也是進行基于駕駛操縱行為識別的車輛主動安全系統研究和智能汽車技術研究的基礎.
早期駕駛人操縱行為特性的研究是利用自動控制理論建立自動控制器并采用轉向盤轉角、加速和制動踏板行程來反映駕駛員的駕駛操縱行為[1]. 并沒有從人類運動控制行為、生理學角度出發分析駕駛人操縱動作的特點和規律. 文獻[2-5]等引入反映駕駛人生理特性的肌電分析法,建立了基于簡單神經肌肉力學特性的駕駛員轉向操縱模型. 文獻[6-8]也提出利用駕駛人的肌電數據描述轉向操縱行為效率的方法. 文獻[9]證實了駕駛員的心率增長率HRI與操縱轉向盤時的轉速之間存在很強的正相關,特別是駕駛人在超車時其HRI隨轉向盤轉速增加更為敏感. 文獻[10]采集仿真和實車試驗兩種情況下駕駛人心率進行比較,研究表明與心率相關的指標最能描述駕駛人駕駛操縱過程的精神狀態. 這些研究主要是從某一項生理指標的角度對操縱行為展開研究. 事實上,駕駛人的每一個操縱行為,首先是由大腦接收信號,然后通過神經系統和神經元支配和控制身體的肌肉和骨骼配合從而共同完成的,因此是多項生理機能共同作用的結果. 而僅從某一項生理指標的角度來反映駕駛操縱行為還不夠完整和具體,有必要從多項生理指標角度對駕駛操縱行為進行研究.
目前研究駕駛人操縱行為的研究方法主要有自然駕駛行為方法、交通事故數據方法、駕駛模擬器試驗方法、場地測試方法[11]4種. 文獻[12]利用駕駛模擬器對駕駛人操控動作進行測量試驗,研究結果很好地揭示了不同駕駛人操縱動作的差異性. 文獻[13-16]也借助駕駛模擬器采集駕駛人的駕駛操縱行為數據,提出了一種個性化駕駛行為模式建模方法,為駕駛安全輔助系統的開發在智能化和個性化方面提供理論依據. 這些研究都基于駕駛模擬器采集數據,雖然具有數據獲取及時、事件及行駛軌跡可控等優點[17],但并不能完全真實準確的反映駕駛人在自然駕駛狀態下的駕駛操縱行為特征. 交通事故數據方法雖然可獲取典型交通事故場景,但得到數據中關于駕駛人操縱行為尤其是腳操縱行為的數據并不多,樣本數量和準確性很難滿足需要. 場地測試也存在一定的缺陷. 因此,近幾年采集自然駕駛狀態數據的自然駕駛行為方法被越來越多的應用. 自然駕駛行為研究(NDS)方法是指在沒有外界干擾駕駛員行為的條件下采集真實交通環境中自然駕駛狀態下駕駛行為的一種研究方法[18],其特點是在自然駕駛狀態下采集駕駛行為數據,提取的數據真實準確,因此被越來越多的應用,但數據的采集和實驗過程相對復雜. 文獻[19-21]等用自然駕駛行為法證實了駕駛人踏板操縱與駕駛負荷之間的相關性. 但研究僅針對山區公路,對城市道路自然駕駛狀態下駕駛人腳操縱行為規律的研究尚未開展.
綜上所述,采集駕駛人自然駕駛習慣下真實駕駛狀態數據,選取與腳操縱行為密切相關的3項主要生理指標,證實加速和制動踏板力與3項生理指標之間的相關性,建立自然駕駛工況下駕駛人腳操縱行為多元回歸模型,并對模型準確性進行驗證. 同時通過數據統計獲得中國城市道路不同交通量、駕駛經驗(駕齡)、性別、年齡的駕駛人自然駕駛狀態下踏板踩踏頻率的一般規律特征,并對其進行定性的風險分析. 旨在從兩個維度揭示中國城市道路駕駛人腳操縱行為一般規律,用于基于駕駛操控行為的駕駛輔助系統研發、模擬駕駛人操控行為和規律的自動駕駛技術研究、基于駕駛人操控規律的智能汽車技術設計和開發等.
1 試 驗
1.1 試驗道路和車輛選擇
為獲取不同交通環境下駕駛人自然駕駛試驗數據,試驗路段選取哈爾濱市44.2 km城市道路,全程線路為:黃河路—文昌街—教化街—安發橋—松花江公路大橋—松北大道—中原大道—松浦大橋—南十四道街—宣化街—黃河路,如圖1所示. 考慮被試駕駛人對生理采集裝置的適應性,在試驗開始的4.2 km路段行駛所采集數據不作為研究使用,剩余路段按每公里1個路段單元進行劃分,可獲得40個路段單元.
2018年哈爾濱市民用汽車保有量182.6萬輛,其中小型客車150.3萬輛,占83.3%[22]. 因此試驗所選車型為中國小型轎車中保有量最大的大眾公司生產的速騰1.8T轎車(圖2),車輛為自動擋變速器.

圖1 試驗路段路線圖 圖2 試驗車型
1.2 被試駕駛人
選擇36名身體健康且非職業性駕駛人作為被試,駕駛人實際駕齡為0.25~15 a,平均駕齡為6.5 a. 其中18人駕齡為3 a以下,18人駕齡為3 a以上且年均駕駛里程數超過10 000 km. 駕駛人年齡為22~50歲,平均年齡為37.5歲. 36人中女性12人,男性24人,符合2019年公安部公布的中國現有駕駛人分布情況. 為獲得駕駛人自然駕駛狀態下真實數據,在試驗開始前和試驗過程中不對駕駛人提出任何附加任務要求,保證其按平時的駕駛習慣駕駛操縱車輛. 每名被試在自然駕駛狀態下沿試驗路段連續行駛44.2 km.
1.3 數據采集
使用北京津發科技股份有限公司的可穿戴生理記錄系統模塊、可穿戴無線動作捕捉模塊、可穿戴腦電測量系統模塊、HRV心率變異性高級分析模塊、可穿戴生物力學測量系統、EMG肌電圖高級分析模塊、 General基礎生理分析模塊采集駕駛人自然駕駛狀態下實時的腦電、肌電、脈搏、血壓、心率等多項生理指標數據,如圖3所示.

(a)被試駕駛人 (b)自然駕駛狀態 (c)生理指標數據采集系統
同時借助GPS道路環境與車輛數據采集系統(圖4)可獲得汽車移動時的速度和距離,并且能夠測量實驗車輛的橫向加速度、縱向加速度、加速踏板力、制動踏板力、踏板行程、轉彎半徑、轉向力矩等. 試驗過程中,各傳感器通過Wi-Fi與插在筆記本電腦的接收器進行連接,傳輸數據并保存. 每名被試在選定好的交通路線上行駛兩次,分別是白天平峰時段、晚高峰時段的城市道路. 所選的道路及時段均可滿足3種交通流密度,試驗過程中攝像機記錄各路段單元交通量. 試驗最終獲得36名駕駛人1 591 km城市道路共2 340 min自然駕駛狀態數據.
1.4 評價指標選取
駕駛人完成一個完整的操縱動作,首先是由大腦接收信號,然后通過神經系統和神經元支配和控制身體的肌肉和骨骼配合來共同完成. 因此,選取駕駛人的腦電(EEG)、心率(H)、肌電(EMG)3個與操縱過程密切相關的參數來研究駕駛人的腳操縱行為特性. 由于車輛在道路上行駛是一個高度動態化的過程,為了更好的反映出駕駛人生理狀態的瞬變性和累積性,選用動態的腦電變化率EEGδ、心率變化率Hδ、肌電變化率EMGδ,具體數據的處理方法主要借助MATLAB進行計算和處理. 其計算式分別為
Hδ=(Hmax-H0)/H0,
(1)
EEGδ=(EEGmax-EEG0)/EEG0,
(2)
EMGδ=(EMGmax-EMG0)/EMG0.
(3)
式中:EEGmax為駕駛人在某一路段單元行駛時腦電最大值;EEG0為駕駛人在某一路段單元行駛時腦電平均值;Hmax為駕駛人在某一路段單元行駛時心率最大值;H0為駕駛人在某一路段單元行駛時心率平均值;EMGmax為駕駛人在某一路段單元行駛時肌電最大值;EMG0為駕駛人在某一路段單元行駛時肌電平均值.
2 踏板操縱與駕駛人主要生理指標相關性分析
2.1 踏板力與駕駛人EEGδ、Hδ、EMGδ相關性
駕駛人踏板操縱主要包括加速踏板、制動踏板和離合器踏板,由于自動變速器在車輛上的廣泛應用,大多數轎車不再采用離合器踏板. 因此選取踏板操縱中制動踏板力和加速踏板力進行研究. 為了明確踏板力分布特征及其與駕駛人主要生理指標之間的關系,對加速踏板力和制動踏板力數據進行了整理,僅提取每個路段單元中加速踏板力和制動踏板力的曲線最大值. 由于有效試驗路段為40 km,按每公里1個路段單元進行劃分可獲得40個路段單元. 而試驗中有36名被試駕駛人,每公里可提取36組踏板力(加速踏板力和制動踏板力各36個)樣本值,這樣實驗路段全程可獲得制動踏板力和加速踏板力樣本各1 440個.
整理統計踏板力數據,得到圖5、6所示制動踏板力和加速踏板力的概率分布直方圖. 從圖5可知,城市道路中加速踏板力主要集中在20~32 N,其中24 N左右使用頻率最高,10 N以下和44 N以上發生概率相對較低. 制動踏板力多集中在26~42 N,最高使用頻率為30 N左右,48 N以上發生概率相對較低. 加速和制動踏板力的均值分別為27 N和34 N. 制動踏板力的均值大于加速踏板力,說明在城市道路中,人們更愿意通過制動踏板力實現對車速的控制.

圖5 加速踏板力概率統計分布圖

圖6 制動踏板力概率統計分布圖
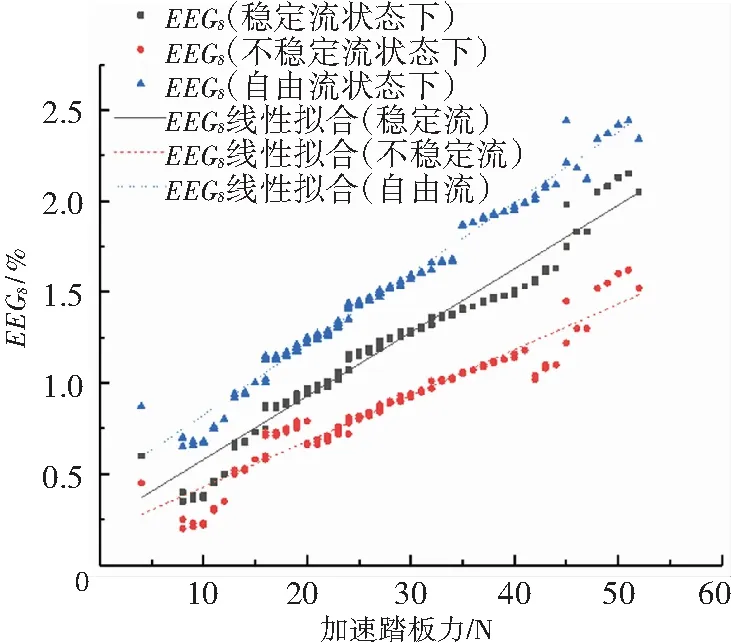
統計每個路段單元上36名駕駛人的腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ),與對應時刻的加速踏板力Fai、制動踏板力Fbi,形成數據點對:
繪制散點圖,如圖7所示. 采用飽和度[23]對交通流狀態進行劃分和描述,即自由流狀態飽和度為0~0.25,穩定流狀態飽和度為0.25~0.53,不穩定流狀態飽和度為0.53~0.64,其中飽和度為實際交通量和設計交通量的比值.
從圖7可知,駕駛人腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ)會隨加速踏板力Fai、和制動踏板力Fbi的增加而增加. 這是因為隨著加速踏板力的增加,車速會增加,駕駛人注意力會更集中、精神會更緊張、腿部肌肉收縮更明顯. 因此駕駛人EEGδ、Hδ和EMGδ會隨加速踏板力的增加而表現出增長的趨勢. 同樣隨著制動踏板力逐漸增大,車速逐漸降低趨于制動,此時駕駛人更關注與前車的安全制動距離,避免碰撞,因此EEGδ、Hδ、EMGδ會隨制動踏板力的增加而表現出增長的趨勢.
由圖7可以看出:當交通量較小時(自由流狀態),駕駛人的腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ)與加速踏板力的擬合曲線斜率均比其與制動踏板力的曲線斜率大. 說明相對制動踏板力而言,EEGδ、Hδ、EMGδ這3項指標隨加速踏板力的增加更敏感. 這是因為自由流狀態下,駕駛人會不斷增加加速踏板力從而獲得更高車速,車速越快,駕駛人精神會越緊張、注意力會越集中、腿部肌肉收縮也會越明顯. 因此腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ)會隨加速踏板力的增加變得更加敏感.
同樣由圖7可知:當交通量較大時(不穩定流狀態),駕駛人腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ)隨制動踏板力的擬合曲線斜率均比其與加速踏板力的曲線斜率大. 說明相對加速踏板力而言,EEGδ、Hδ、EMGδ這3項指標隨制動踏板力的增加更敏感. 這是因為交通量較大的情況下,尤其接近飽和流量時,車輛走走停停,駕駛人為了避免相鄰車道車輛的強行并入,總是盡可能減小與前車跟馳行駛的距離. 所以習慣于將腳放置于制動踏板上,而不是將擋桿置于P擋進行等候,這樣的操縱勢必增加駕駛人精神和腿部肌肉的緊張和疲勞程度. 因此交通量較大時在頻繁的操縱和緊張的駕駛環境下使得駕駛人EEGδ、Hδ、EMGδ隨制動踏板力變得更加敏感.
2.2 多元回歸模型
為更好地消除駕駛人的個體差異,對每個被測路段單元的不同被測試駕駛人的腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ)和踏板力(加速踏板力和制動踏板力)數據取算術平均值,即每個路段單元對應1組生理數據和1組踏板力平均值,再繪制散點圖,可知相關性變得更強. 進行多元線性回歸分析,其線性表達式為
Fa=-15.42x1-5.878x2+49.116x3-8.721,R2=0.943,
(4)
Fb=-9.838x1+6.032x2-11.348x3+27.792,R2=0.983.
(5)
式中:x1=EEGδ,x2=Hδ,x3=EMGδ,Fa為加速踏板力,Fb為制動踏板力.
(a)加速踏板力Fai與腦電EEGδ相關性

(c)加速踏板力Fai與肌電EMGδ相關性

(e)制動踏板力Fbi與心電Hδ相關性

(b)加速踏板力Fai與心電Hδ相關性

(d)制動踏板力Fbi與腦電EEGδ相關性

(f)制動踏板力Fbi與肌電EMGδ相關性
用MATLAB對模型進行參數確定,從運算結果可知,模型回歸效果顯著(R2=0.943和R2=0.983),對模型進行檢驗,在殘差圖中,只有第1個和第11個數據殘差離零點較遠,可視為異常點. 其他所有數據的殘差均距零點很近,并且數據的殘差置信區間也均將零點包含在內,這說明回歸模型(4)、(5)能較好符合數據.
3 駕駛人踏板踩踏頻率特征
3.1 基于交通量的駕駛人踏板踩踏頻率特征
由于車輛是具有高度非線性和遲滯性特征的復雜系統,駕駛人為了將車速維持在期望速度附近,需要頻繁地踩踏加速和制動踏板,在城市道路中尤其是交通流密度較大路段體現更加明顯. 本文設定駕駛人加速或制動踏板力每歸零一次計為一次踩踏,駕駛人在單位時間內的踩踏次數為踏板踩踏頻率(次/min). 對試驗數據整理,取每個路段單元所有被試駕駛人最大踩踏頻率的算數平均值(減小個體差異影響),與對應路段交通量形成數據點對,繪制散點圖,得到不同交通量下駕駛人踏板踩踏頻率統計圖,如圖8所示.
可見,隨著交通量的增加,駕駛人的踏板踩踏頻率也隨之增加,以城市道路6車道為例,當交通量達到1 200~1 500 veh/h時,踩踏頻率增加明顯. 這說明在交通量較大的情況下,駕駛人習慣于通過頻繁的踏板操縱來調整速度和與周邊車輛的距離. 這勢必增加駕駛人的疲勞程度,從而增加發生事故的隱患,從風險管理的角度來看,增加了事故的風險.

圖8 不同交通量下駕駛人的踏板踩踏頻率
3.2 基于駕駛經驗(駕齡)的駕駛人踏板踩踏頻率特征
對每個駕駛人在全程各個路段單元上的最大踏板踩踏頻率取算數平均值(減小交通量的影響),與對應駕齡形成數據點對,得到駕駛經驗(駕齡)與駕駛人踏板踩踏頻率特征圖,如圖9所示.

圖9駕駛經驗與踩踏頻率特征圖
可見,在不考慮交通量影響的條件下,駕駛經驗(駕齡)越長的駕駛人在駕駛過程中的踏板踩踏頻率越低,駕駛經驗(駕齡)在3~6個月的駕駛人在駕駛過程中的踏板踩踏頻率最高. 這說明駕駛經驗(駕齡)較短的駕駛人,由于對車輛的操控熟練度及周邊環境的感知和判斷準確性不足,要通過頻繁地加速和制動踏板操縱來進行修正,以達到期望速度和安全車距. 這同樣會增加駕駛人的疲勞程度,增加錯誤操作出現的概率,從而增加發生事故的隱患,從風險管理的角度來看,增加了事故的風險.
3.3 基于駕駛人性別、年齡的踏板踩踏頻率特征
用同樣的方法,對不同性別和年齡的駕駛人的平均踩踏頻率進行統計,得到性別和年齡與駕駛人踏板踩踏頻率特征圖,如圖10所示.

圖10 性別和年齡與駕駛人踏板踩踏頻率
從圖10可知,在不考慮交通量影響的條件下,女性較男性駕駛人在駕駛過程中的踏板踩踏頻率高,年齡較高的駕駛人較年輕駕駛人在駕駛過程中踏板踩踏頻率低. 其中,30~40歲駕駛人在駕駛過程中的踏板踩踏頻率最低,18~25歲駕駛人在駕駛過程中的踏板踩踏頻率最高. 這是因為女性駕駛人,駕駛過程中表現較為謹慎,她們更愿意通過頻繁的加速和制動踏板操縱來進行調整和修正,確保安全行駛. 而年齡較小的駕駛人在交通參與過程中表現較為活躍,因此在駕駛過程中踩踏頻率也較高, 他們在交通量較小時風險較低,在交通量較大時風險會隨之增加.
4 結 論
1)通過對自然駕駛數據統計分析,發現制動踏板力的均值高于加速踏板力,對應最高使用頻率制動踏板力幅值也是高于加速踏板力. 這說明城市道路駕駛人更愿意通過操縱制動踏板實現對車速的控制.
2)通過對自然駕駛數據統計分析,論證了加速踏板力、制動踏板力與駕駛人腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ)3項生理指標的相關性. 利用回歸分析建立了基于自然駕駛數據的駕駛人腳操縱行為模型,該模型具有較高擬合精度. 該模型的建立,突破了傳統研究對駕駛人單一生理指標進行分析的局限性.
3)統計發現,當交通流量較小時,腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ)隨加速踏板力的增加比其隨制動踏板力增加更為敏感. 但在交通流量較大時,腦電變化率(EEGδ)、心率變化率(Hδ)、肌電變化率(EMGδ)對制動踏板力的增加則更敏感.
4)城市道路駕駛人踏板踩踏頻率具有明顯特征:駕駛人踏板踩踏頻率隨交通量的增加而增加,當交通量達到某一臨界值時,踩踏頻率增加明顯. 駕駛經驗(駕齡)越長的駕駛人在駕駛過程中的踏板踩踏頻率越低,駕駛經驗(駕齡)在3~6個月的駕駛人在駕駛過程中的踏板踩踏頻率最高. 女性較男性駕駛人在駕駛過程中的踏板踩踏頻率高. 年齡較高的駕駛人較年輕駕駛人在駕駛過程中踏板踩踏頻率低,30~40歲駕駛人在駕駛過程中的踏板踩踏頻率最低,18~25歲駕駛人在駕駛過程中的踏板踩踏頻率最高.
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
黃河之聲(2020年4期)2020-12-07 10:48:25
公路與汽運(2020年6期)2020-12-07 02:22:10
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
汽車與駕駛維修(維修版)(2018年8期)2018-09-21 02:48:54
讀寫算·素質教育論壇(2017年16期)2017-08-04 07:52:36
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
北方音樂(2016年22期)2016-02-04 16:52:16