車聯網環境下干線交通信號協調控制方法
2021-03-17 03:23:38蔣賢才謝志云
哈爾濱工業大學學報 2021年3期
關鍵詞:信號
蔣賢才, 金 宇, 謝志云
(哈爾濱工業大學 交通科學與工程學院, 哈爾濱 150090)
干線交通信號協調控制是解決城市道路交通堵塞的有效途徑之一. 傳統的研究方法主要圍繞基于延誤最小的優化模型和基于帶寬最大的優化模型兩方面展開. 在傳統的干線協調控制中,綠波設計速度與運行速度往往固定,干線信號協調控制難以取得令人滿意的綠波帶寬. 為此,文獻[1]根據檢測到的交通數據,提出了一種能夠實時動態調整綠波帶寬的干線信號協調控制方法;文獻[2]建立了一種不均勻雙循環模型,能夠有效減少干線上小交叉口的過度延誤等問題,對提高干線信號協調效果起到了積極作用. 而更多的學者則提出了車速誘導策略,引導駕駛員調整其駕駛行為,通過車速的動態引導來減少車輛的延誤和排隊、減少燃油消耗與環境污染物的排放并提高干線交通的安全性[3-5]. 近年來,干道協調車速誘導模型的研究主要包括:考慮車輛平均延誤和停車時間的模型[6]、基于公交優先策略的模型[7]和減少出行時間的模型[8]. 文獻[9]以公交車的延誤與停車次數加權最小為目標,以周期時長和相位飽和度為約束條件,建立了公交車速引導和交叉口信號配時集成優化的整數線性規劃模型. 文獻[10]提出了一種基于動態速度引導和動態信號配時的交通管理方法,在路段中以必要的速度動態引導車輛通過交叉口,并根據車輛檢測數據,調整前一交叉口的信號配時,該策略使車輛盡量在不停車的情況下通過交叉口. 然而,這些研究的車速引導方案往往基于車輛檢測或預測數據得到,面向群體發布而非針對個體車輛的定制車速引導,控制成效仍有待于進一步提高. 在車聯網環境下,利用車輛和路側設施之間雙向信息交互,可實時建立單車的定制速度引導方案,為提高干線協調的綠波帶寬奠定了技術基礎. 如文獻[11]將速度誘導策略引入到車輛跟馳模型中,有效降低了單車道多信號交叉口的油耗和停車次數; 文獻[12]提出了一種城市道路網動態速度協調的非線性數學模型,通過速度協調來減少行程時間、速度方差和停車次數;文獻[13]進一步提出了分布式協調優化算法,用于路網中網聯車輛的動態速度優化,來保證系統的可擴展性和實時性; 文獻[14]基于速度引導和交叉口信號調整,提出了一種在V2I環境下的高頻公交專用道動態車頭時距控制方法,用來提高車輛的運行效率; 文獻[15]將被引導車輛及其后的普通車輛視為一個車隊,通過分析車輛位置和速度等信息確定誘導速度,使得車輛能夠不停車通過交叉口; 文獻[16]提出了一種動態速度引導與動態信號配時的集成優化控制模型,對進行車速誘導后仍不能在綠燈相位通過交叉口的車輛給予綠燈時間補償; 文獻[17]提出了車聯網環境下信號交叉口車速控制策略,在提高交叉口通行效率的基礎上兼顧了駕駛舒適性與環境友好性; 文獻[18]基于車聯網技術提出了一種針對混合車流通過信號交叉口的車速誘導控制方法,能夠降低車輛的燃油消耗并提高駕駛舒適性. 然而,這些研究大多著眼于單個交叉口的速度引導控制,協調控制優化模型仍為非全局的、完全動態的優化模型. 基于此,本文考慮車速引導與信號控制方案的雙向調整,提出一種新的車聯網環境下干線交通信號協調控制方法,期望能對上述問題的解決提供一些思路.
1 問題描述與模型假設
城市主干道上的車輛以平均行駛速度行駛到下游交叉口時,會遇到3種情況:信號燈為綠燈,入口無排隊;信號燈為綠燈,入口有排隊車輛;信號燈為紅燈. 為了實現車輛盡可能多地通過交叉口的目標,現有的控制策略通過引導車輛的行駛速度來改變車隊到達下游交叉口的時間. 一般的控制方法是設置可變速度引導標,根據信號燈的狀態判斷進入路段的車輛是否需要速度引導. 此時,將遇到以下問題:1)主干道上的車輛被動地根據信號燈的狀態來進行速度引導,車輛在交叉口不能形成飽和車隊;因引導路段長度的限制,調節效果相對有限,優化效果不理想. 2)當大多數可引導的車輛通過交叉口時,綠燈相位仍未結束,導致綠燈利用率低. 3)綠燈結束時,車輛未完全通過下游交叉口,導致車輛延誤增加.
在車聯網環境下,如果能根據交通流狀態進行實時的交叉口信號控制方案調整和車速誘導控制,則能最大程度地提高綠燈時間的利用效率,并可以減少車輛排隊,提高交叉口的交通效率. 為了量化本文所建立的車聯網環境下的干線協調控制模型的潛在效益,以干線直行車流作為關鍵車流進行車速誘導控制,并進行交叉口的信號控制方案調整,提出如下假設:1)道路上的車輛為網聯車輛,裝備有車聯網通信設備,具備車輛定位、實時通信和信息顯示等功能. 2)所有車輛都按照交叉口交通控制系統提供的車速誘導策略信息行駛并通過信號交叉口. 3)各個交叉口信號相位方案不變,干線方向直行相位為第1相位. 4)所有車輛進入路段后及時完成車道變換. 5)暫不考慮非機動車和行人對機動車的影響.
2 干線協調交通信號控制優化模型
2.1 優化目標
交叉口停車是造成交叉口運行效率和能耗低下的重要原因. 與其他方法相比,當采用車速誘導控制時,交叉口的停車次數和延誤都會發生變化. 為全面反映本文建立優化模型的性能,將車均延誤和平均停車次數加權形成一個綜合性能評價指標(PI),來優化干線協調信號控制參數. 一般來說,PI越大,延誤也就越大,停止次數也越多,PI的計算公式為
PI=w1·d+w2·n.
(1)
式中:d為車均延誤,s/pcu;n為停車次數;w1、w2分別為延誤和停車的權重.
信號控制參數優化目標為
(2)

內進入路段的車輛為i號交叉口第k周期第p相位要處理的到達交通量為
(3)

誘導車速區間的最大值一般取城市道路最高限速值. 國內相關規范中并無城市道路最低限速的規定,誘導車速區間的最小值可從車輛行駛的舒適性、經濟性等考慮,參照文獻[19]中的方法予以確立.
2.2 約束條件
2.2.1 一般約束
相位綠燈時長應滿足條件:
(4)
最小綠燈時長應滿足行人過街的需要,即
(5)

2.2.2 相位差策略
首先以關鍵交叉口周期時長作為公共周期時長C,以i-1和i交叉口為例,設i-1至i交叉口方向為下行方向,根據以下3種情況分別進行討論.
(6)

2)當交叉口間距相當短時,將相鄰交叉口視為一個交叉口,進行同步式協調控制. 為使控制效果最佳,應使雙向車流一半以上的車輛能成功在綠燈相位不停車通過交叉口,否則僅誘導其中一股車流時效果更好,交叉口間距應滿足:
(7)

3)當交叉口間距滿足:
(8)

2.2.3 信號控制方案調整策略

(9)

當存在j≥x且第j輛車通過i號交叉口的時間滿足:

(10)

(11)
2.3 綜合評價指標模型
信號控制方案調整后i號交叉口第k周期第p相位綠燈開啟時間為
(12)
則在時間區間

(13)

第p相位r方向綠燈時間內最多可通行的車輛數為
(14)

第j輛車到達交叉口時的排隊長度為
(15)

i號交叉口第k周期第p相位r方向的第j輛車到達交叉口時的誘導速度為
(16)

i號交叉口第k周期第p相位r方向的第j輛車到達交叉口時的PI值為
(17)
i號交叉口第k周期第p相位車輛的總PI值為
(18)
w1、w2根據一次停車過程的損失時間與延誤的等效換算關系進行折算. 車輛從原車速減速—停止—加速到原車速這一過程所需的時間為
(19)
式中:t1為一次停車過程所需的時間,s;a1為期望減速度,m/s2;a2為期望加速度,m/s2;λ為駕駛員平均反應時間,s.
停車過程的損失時間為
(20)
式中t2為車輛停車過程損失時間,s.
w1為交叉口車輛延誤的權重,一般取1,根據等效換算關系,則有
w2=w1·t2.
(21)
2.4 求解算法
本文信號控制參數優化模型待優化變量為各個相位的綠燈顯示時間,優化目標為車均綜合性能指標(PI)最小,屬于典型的非線性整數優化模型,為解決這一問題,可采用遺傳算法求解. 然而遺傳算法涉及交叉、變異、終止條件判斷等,運算規模大、耗時長. 鑒于各個相位的綠燈時間均有最大、最小值限制,通過有限窮舉就能快速得到優化結果,較遺傳算法能節省大量的運算時間. 因此,本文優化模型的求解算法采取窮舉法,優化算法步驟如下.
步驟1在滿足約束條件下,確定交叉口可能的信號控制方案數m與優化結束時間,令i=1、j=1、 PI0=1 000.
步驟2根據上游交叉口的信號控制方案和交通狀況確定車輛進入路段的時間分布.
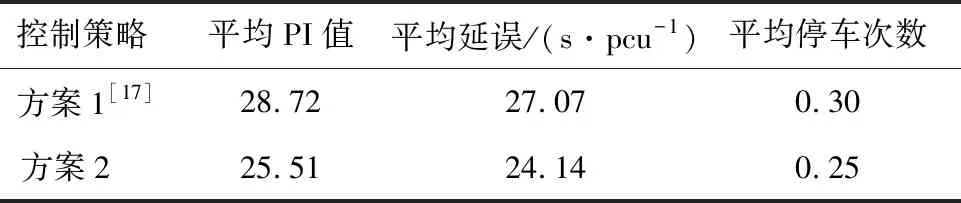
步驟3計算交叉口第i周期第j方案的車均PI值,若PI 步驟4判斷j是否小于m+1,若是,返回步驟3;否則,進入步驟5. 步驟5以當前存儲的信號控制參數作為第i周期的信號輸出方案,并令i=i+1、j=1、 PI0=1 000,進入下一步,開始下一周期的信號控制方案優化. 步驟6是否已到結束時間,若否,進入步驟2;若是,結束優化流程. 以哈爾濱市祥安北大街(龍軒路—龍盛路)為例,將其從南到北的3個交叉口分別命名為A、B、C,均為4相位控制方案,南北直行相位為協調相位. 以B交叉口為研究對象,該交叉口次要道路方向相鄰交叉口為D、E,干線道路進口道設置有3條直行車道(含直右)、1條左轉車道,其余道路均為兩條直行車道(含直右)、1條左轉車道,車道寬度均為3.5 m;LAB=380 m,LBC=360 m,LBD=640 m,LBE=750 m. 各交叉口調查的平峰流量(2019年6月11日9:00—10:00)見表1. 表1 交叉口流量 計算各交叉口初始信號配時方案,確定公共周期時長為100 s,并以公共周期時長為基礎對干線各交叉口現狀信號方案進行調整. 根據式(19)~(21)及交通調查結果,按期望加速度(減速度)為3 m/s2、車輛啟動反應時間為1.4 s[20]計算,則停車過程損失時間為5.5 s,由此確定w1=1、w2=5.5. 本文借助VISSIM進行交通仿真. 首先,在VISSIM中建立5個交叉口的布局模型. 然后,根據哈爾濱市的實際調查結果,對VISSIM中的仿真參數進行標定,結果是:直行車道和左轉車道的飽和流率分別為1 450 pcu/h和1 350 pcu/h,啟動損失時間為3 s,平均行程速度暫定為45 km/h,最大加速度(減速度)為5 m/s2,期望加速度(減速度)為3 m/s2,靜止狀態平均停車距離為1.5 m,行駛狀態最小距離為1.2 m. 最后,在VISSIM中建立了兩種信號協調控制方案進行對比分析. 方案1為僅實施速度引導的協調信號控制方案[17],方案2為本研究提出的協調信號控制方案. 方案1和方案2使用動態鏈接庫(DLL)進行編程. 通過VISSIM中的API接口,將定制的信號控制方案連接到VISSIM紅綠燈控制器上. 在每條車道的兩端分別設置交通流檢測器,記錄每輛車的到達時間,動態采集到達交通量. 在仿真過程中,每0.5 s對每個檢測器的狀態進行檢測,得到到達和駛離的交通量,以此為基礎來優化協調相位的信號控制參數. 在仿真參數和各方向輸入交通量不變的情況下,以PI為評價指標,根據不同的誘導速度范圍進行仿真,仿真時長均為1 h,仿真結果如圖1所示. 圖1 不同的誘導車速范圍下的仿真結果對比 由圖1可以看出,當誘導速度范圍較大時,交叉口的平均PI相對較低. 與僅實施速度引導策略的方案相比,本文提出的干線道路協調控制方法實施后,交叉口車均PI值有一定程度的降低. 分析交叉口不同相位車均PI值的差異后發現,由于本文根據干道直行方向的車流狀態進行下游信號方案的調整,并進行車速誘導控制,干道直行相位車均PI值較小,而其他相位車輛是被動的根據交叉口信號方案進行車速誘導控制,且次要道路方向相鄰交叉口的周期時長存在差異,導致車均PI值較大. 本文案例路段為城市主干路,限速60 km/h,因此誘導車速的最大值為60 km/h;誘導車速的最小值從車輛行駛的舒適性、經濟性等考慮,根據文獻[19]中的方法設定為25 km/h;調查得到該道路的平均行程車速為45 km/h. 綜上,以誘導速度為25~60 km/h、平均行程車速為45 km/h進行仿真,仿真結果見表2、3. 表2 平均PI值對比分析 表3 性能指標變化情況 對比表2、3中的仿真結果,本研究提出的優化方法將每輛車的平均PI值從28.72降低到25.51,與僅在相同交通條件下實施速度引導策略的方案相比降低了11.2%. 同時,車均延誤和平均停車次數兩個仿真性能指標的變化與每輛車PI值的變化相一致,說明PI能總體反映車均延誤和平均停車次數的變化趨勢. 南北直行關鍵車流形成車隊,綠燈時間的利用效率提高,當個別周期到達車輛數較大時,延長綠燈時間能使車均PI值減少. 多數情況下,由于南北直行相位綠燈時間利用效率提高,綠燈時長縮短,其他相位綠燈時間增加且開啟時間提前,從而其他相位車均PI值也有一定程度的下降. 結果表明:本文提出的干線交通信號協調控制方法是可行和有效的. 3.4.1 速度誘導區間的影響 車輛誘導速度的范圍直接影響到車輛誘導的效果,一般來說,車輛的速度引導范圍越大,車輛越有可能通過速度調節來改變到達下游交叉口的時間,從而增加誘導車輛數和減少停車次數. 依次控制道路上車輛的最小誘導速度和最大誘導速度,使最大誘導速度為50、52、54、…、66 km/h,最小誘導速度為18、20、22、…、34 km/h,步長為2 km/h,得到交叉口的平均PI值變化情況,如圖2所示. 圖2 車輛誘導速度范圍的影響 由圖2可以看出,當路段最小誘導速度降低時,車輛有更大的到達時間調整區間,特別是當車輛以較高速度行駛至下游交叉口而相位綠燈仍未開啟時,可以引導車輛以低速行駛,并在排隊消散時通過交叉口,交叉口的平均PI值逐漸減小. 當車輛以原平均行程車速行駛而不能在排隊車輛消散時到達交叉口,可以誘導車輛以更大的速度行駛,避免綠燈時間的損失,因此當車輛的最大誘導速度增加時,車輛的速度調整范圍更大且車速更高,平均PI值明顯降低. 因此,在滿足安全性和經濟性的前提下,車輛的速度誘導區間越大,對主干道實施協調控制的效果就越好. 3.4.2 平均行程車速的影響 本文所述的平均行程車速為進行干線協調控制之前道路上車輛的實際行駛速度,反映了進行優化控制之前道路上的交通運行狀態. 從式(17)可以看出,平均行程車速對車輛PI值的計算結果有一定的影響. 當平均行程車速較低時,車輛以較高的誘導速度行駛可顯著縮短路段行駛時間,從而減少車輛延誤. 當平均行程車速較高時,一些以該速度行駛的車輛會在排隊車輛消散之前到達下游交叉口并排隊,當其以較低的誘導速度行駛時,路段上的行駛時間增加,但減少了在交叉口的停車排隊,車輛延誤基本不變,當PI值為負時,將其賦值為零,應避免計算車輛的PI值為負. 依次控制道路上平均行程車速為30、32、34、…、50 km/h,步長為2 km/h,得到交叉口各相位的平均PI值,如圖3所示. 當平均行程車速較低時,車輛在路段上的行駛時間較長,車輛被誘導的機會增大,停車次數能顯著減少. 從仿真結果可以看出,當實施車輛速度誘導控制時,隨著平均行程車速的增加,交叉口各相位的平均PI逐漸增大. 因此,當平均行程車速較低時,本文提出的干線協調控制方案效果更好. 圖3 車輛平均行程車速的影響 3.4.3 交叉口間距的影響 交叉口間距制約了車輛到達下游交叉口時的時間區間范圍的大小,對車速誘導效果的影響明顯. 為研究交叉口間距對交叉口平均PI值的影響,令LBC=300、400、500、…、1 200 m,LBD=350、400、450、…、650 m,LBE=350、400、450、…、650 m,得到交叉口各相位的平均PI值,如圖4所示. (a) C至B直行車輛平均PI值變化 (b) 車輛平均PI值隨交叉口間距變化 由2.2.2節可知,當干線交叉口間距不足時,僅能實現部分車流或某一方向車流的成功誘導,交叉口平均PI值較高. 當雙向車流均能誘導時,交叉口間距會影響到下一周期各相位要處理交通量的時間區間大小(即式(3)中的到達交通量)和綠波帶設計速度大小,當交叉口間距較短時,確立的時間區間較小,綠波帶設計速度較小,后續進入路段的連續車流不能得到及時處理,導致協調相位綠燈時間不足,使得停車次數和延誤增長;而當交叉口間距過大時,確立的時間區間過長,又會導致綠燈時間過長等待不必要協調的交通量,也會使得車均延誤增長. 因此,交叉口間距與PI之間存在波動性,在LBC=750 m時,二者之間能取得最佳效果,如圖4(a)所示. 由圖4(b)可以得知,當次要道路方向交叉口間距增加時,車輛以誘導車速行駛時到達下游交叉口的時間區間更大,因此可以更好地通過調整車速實現在排隊車輛消散時到達下游交叉口的目標,交叉口平均PI值逐漸減小. 而當交叉口間距較短時,通過車速引導改變車輛到達下游交叉口時間的能力有限,往往導致誘導失敗,造成車輛平均PI值較大. 1)提出了一種車聯網環境下基于車速誘導的干線信號協調控制方法,相比于常規的車速誘導方案,可以根據干線道路上關鍵車流的實時到達情況,確定合理的車輛誘導速度和下游交叉口的信號調整方案. 同時,根據調整后的信號控制方案,進行非關鍵相位車輛的車速誘導控制,使得車輛能夠形成飽和車隊,并盡可能不停車通過交叉口,從而提高了交叉口綠燈時間的利用效率,減少了車輛延誤和停車次數. 2) 建立了車聯網環境下的干線協調控制相位差方案,為干線交叉口的雙向協調控制奠定了基礎;以形成飽和車隊為目標制定了車輛速度誘導控制策略,并確定了交叉口信號控制方案調整策略;綜合車輛延誤和停車情況,建立了交叉口運行的評價指標模型,以交叉口車均PI最小為優化目標,建立了干線協調交叉口信號控制參數優化模型,并給出了求解算法. 3) 案例分析表明,與僅進行車速誘導的信號控制方案相比,所提出的干線協調信號控制方法能使交叉口車均PI降低11.2%. 進一步分析表明,速度誘導區間、平均行程車速、交叉口間距等因素對信號控制方案優化結果能產生顯著影響.3 算例分析與仿真驗證
3.1 仿真交叉口

3.2 仿真環境構建
3.3 仿真結果分析



3.4 敏感性分析




4 結 論
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06