基于A*路徑算法的單發(fā)失效應(yīng)急航線設(shè)計(jì)研究*
2021-03-20 05:19:52魯力
科技創(chuàng)新與應(yīng)用 2021年11期
關(guān)鍵詞:程序設(shè)計(jì)
魯 力
(中國民用航空飛行學(xué)院 空中交通管理學(xué)院,四川 廣漢 618307)
引言
山區(qū)機(jī)場在設(shè)計(jì)離場航線時(shí),需要考慮一臺發(fā)動(dòng)機(jī)失效時(shí),飛機(jī)還能不能按照原計(jì)劃的離場梯度及預(yù)定航線飛行,此時(shí)需要在公布的離場程序基礎(chǔ)之上,設(shè)計(jì)單發(fā)失效應(yīng)急離場程序。本研究采用A*路徑算法,加入單發(fā)失效應(yīng)急航線設(shè)計(jì)的約束條件,最終設(shè)計(jì)出相應(yīng)離場程序的單發(fā)應(yīng)急航線,并用性能仿真軟件測試設(shè)計(jì)出來的單發(fā)應(yīng)急程序的性能參數(shù),結(jié)果表明,性能參數(shù)均優(yōu)于預(yù)定的離場航線。2014 年,分析直升機(jī)單臺發(fā)動(dòng)機(jī)失效后飛行過程的動(dòng)力學(xué)顯式微分方程。2016 年,孟萬里分析直升機(jī)單臺發(fā)動(dòng)機(jī)失效后飛行過程的動(dòng)力學(xué)顯式微分方程[1]。李志遠(yuǎn)通過使用matlab 仿真波音爬升程序,模擬實(shí)際單發(fā)失效飛行程序,研究在飛機(jī)單發(fā)失效條件下相關(guān)性能參數(shù)[2]。2019 年,魯力利用性能分析軟件對已經(jīng)設(shè)計(jì)好的離場航線進(jìn)行分析評估[3]。
1 路徑算法的確定
路徑算法采用matlab 仿真,設(shè)置起點(diǎn)在仿真的中心顯示為綠色點(diǎn),并隨機(jī)設(shè)置障礙物,在仿真圖中顯示為黑色,本研究選擇的是A*路徑算法,A*路徑算法的原理是程序由起始點(diǎn)開始向周圍n 個(gè)空格尋找路徑,若相鄰空格有障礙物,則重新尋找周圍的空格,若沒有障礙物則向下一個(gè)相鄰空格尋找,直至找到目的地。流程圖如圖1 所示:

圖1 A*算法流程圖
但A*路徑算法的啟發(fā)式算法的初始設(shè)置是曼哈頓函數(shù),采用該啟發(fā)式算法的函數(shù),只能從當(dāng)前空格尋找上下左右四個(gè)空格,采用曼哈頓函數(shù)得出的線路圖如圖2所示。
由圖2 可以看出,曼哈頓啟發(fā)式函數(shù)的判斷公式為:
si=max(xi,yi)

圖2 曼哈頓啟發(fā)式函數(shù)路線圖
其中,si表示第i 次尋找路徑時(shí),程序所經(jīng)過的距離,xi表示第i 次尋找路徑時(shí),周圍空格長度大小,yi表示第i次尋找路徑時(shí),周圍空格寬度大小。
當(dāng)更改后的啟發(fā)函數(shù)設(shè)置為歐幾里得函數(shù)時(shí),當(dāng)然空格向下一空格移動(dòng)過程中,會(huì)選擇周圍8 個(gè)網(wǎng)格,選擇范圍變廣,路徑搜索會(huì)更加廣泛,在沒有障礙物阻礙的情況下,會(huì)尋找出最佳的斜線距離,如圖3 所示:
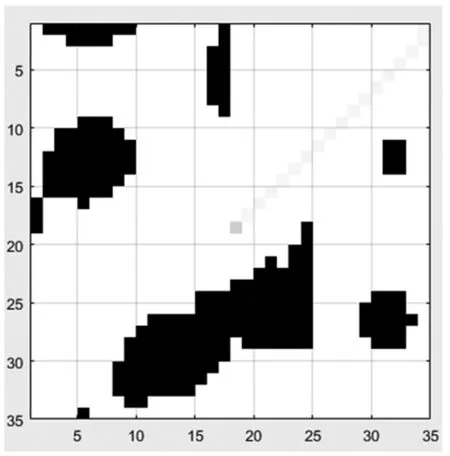
圖3 歐幾里得啟發(fā)式函數(shù)路線圖
由圖3 可以看出,歐幾里得啟發(fā)式函數(shù)的判斷公式為:

其中,si表示第i 次尋找路徑時(shí),程序所經(jīng)過的距離,xi表示第i 次尋找路徑時(shí),周圍空格長度大小,yi表示第i次尋找路徑時(shí),周圍空格寬度大小。
2 實(shí)際機(jī)場仿真
現(xiàn)行的離場程序如圖所示,由于設(shè)計(jì)的M 機(jī)場位于山谷之中,四面環(huán)山,為了遵循設(shè)計(jì)進(jìn)離場分離的航線,離場航線可設(shè)計(jì)為飛機(jī)起飛向西向北再向東飛行,但是這是考慮到飛機(jī)正常,發(fā)動(dòng)機(jī)均為失效的情況下設(shè)計(jì)的。采用單發(fā)性能軟件PEP 軟件進(jìn)行仿真模擬后可以看出該程序的平面和剖面仿真圖,障礙物在航線的正下方,可以從圖4 看出900 米寬度的保護(hù)區(qū)中有n02 至n07 障礙物影響飛機(jī)的爬升梯度,若單發(fā)失效會(huì)影響飛機(jī)的正常飛行,而且性能軟件分析的結(jié)果也顯示該路線的單發(fā)最大起飛重量僅為65 噸,不能很好地滿足公司的經(jīng)濟(jì)運(yùn)行需要。
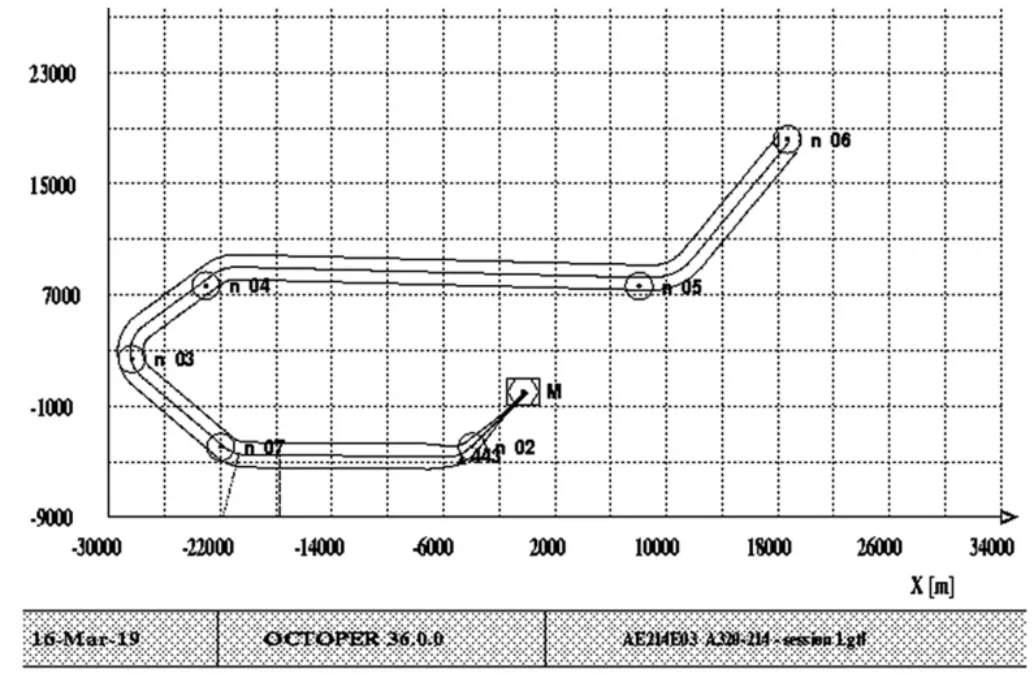
圖4 向西向北再向東飛行平面圖
從圖5 可以看出,若飛機(jī)采用此離場航線作為應(yīng)急程序,則需要滿足超障保持10.7 英尺的余度來飛行,或者保持以下公式的側(cè)向間隔來飛行:
300 英尺+12.5%D
其中D 表示飛機(jī)起飛跑道末端DER 處(有凈空道就在凈空道末端)的距離。

圖5 向西向北再向東飛行剖面圖

圖6 單發(fā)失效應(yīng)急飛行路線圖

圖7 單發(fā)失效性能分析結(jié)果
根據(jù)現(xiàn)行離場程序的路線走向,可以根據(jù)A*算法設(shè)計(jì)單發(fā)應(yīng)急離場程序,降低障礙物的限制要求,比如從剖面圖中可以看出離場航線上的兩個(gè)較高障礙物海拔高度為4687 米和3120 米,在設(shè)計(jì)單發(fā)失效應(yīng)急程序時(shí),避開這兩個(gè)障礙物,再利用A*路徑規(guī)劃算法進(jìn)行應(yīng)急程序的設(shè)計(jì)。
設(shè)置完成海拔為443 米的障礙物,根據(jù)單發(fā)失效應(yīng)急離場航線的特點(diǎn),當(dāng)速度沒達(dá)到綠點(diǎn)速度,最終運(yùn)行出飛機(jī)起飛先向南飛行,再向西向北飛行返回本場,在900米范圍的單發(fā)失效保護(hù)區(qū)內(nèi)僅有443 米障礙物,這樣就可以順利避開海拔為4687 米和3120 米的障礙物。
用空客的PEP 性能分析軟件對設(shè)計(jì)出來的單發(fā)失效應(yīng)急離場航線進(jìn)行計(jì)算,可以看出最大起飛重量可以由65 噸提高到71.3 噸,解決了航空公司在單發(fā)失效方面經(jīng)濟(jì)性能的損失問題,可以滿足各機(jī)場對于單發(fā)失效情況下的離場航線研究,在以后的研究中,可以更加具體單發(fā)保護(hù)區(qū)三維立體圖的效果呈現(xiàn),對于飛行程序設(shè)計(jì)是比較有用的。
3 結(jié)束語
本研究主要運(yùn)用到了A*路徑算法對特定的M 機(jī)場進(jìn)行仿真,設(shè)計(jì)其單發(fā)失效的應(yīng)急程序,結(jié)果表明,若采用該種算法,確實(shí)可以使得航空器以較大的起飛重量運(yùn)行,這樣節(jié)省了航空公司的運(yùn)營成本,也較大程度地提高了飛機(jī)運(yùn)行安全,因此,該算法有比較高的可靠性。但是由于本研究考慮的因素較為簡單,僅考慮了地形的因素,在以后的研究中,將考慮空域等各種因素來設(shè)計(jì)單發(fā)應(yīng)急程序。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
人大建設(shè)(2019年12期)2019-05-21 02:55:44
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
中山大學(xué)法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
環(huán)球時(shí)報(bào)(2017-03-30)2017-03-30 06:44:45
中國衛(wèi)生(2015年3期)2015-11-19 02:53:32