基于最優模糊系統的慣導測量彈道修正模型設計
2021-03-29 01:02:38朱學鋒肖清心
彈道學報 2021年1期
朱學鋒,肖清心
(1.中國人民解放軍92941部隊,遼寧 葫蘆島 125000;2.大連理工大學 電子信息與電氣工程學部,遼寧 大連 116024)
彈道測量數據處理是導彈飛行試驗和鑒定不可缺少的組成部分[1]。
光測、全球導航衛星系統(GNSS)等外測設備測量精度高,但受工作環境和導彈機動性等因素影響,測量數據常常不完全[2-3],即使采用數據拼接和數據融合等處理方法也很難獲得全彈道處理數據。目前,在數據處理領域實現高精度全彈道數據處理,主要是通過數據融合或遙外聯合數據處理的方法[4-5],通常需要進行合理性檢驗,誤差特征統計,數據平滑濾波,各種系統誤差修正等環節[6-7];對于遙測彈道數據,則需要消除制導工具系統誤差,并進行各類測元數據的互校準。這些處理及互校準方法都需要各類測量設備的標校參數及復雜數學模型的支撐,實現難度較大。
遙測彈道數據由彈上慣性導航裝置測量,不依賴于外部的聲、光、電、磁等外部介質傳播信息,能全天候自主導航定位,獲得完整的全彈道數據[8]。但慣性導航是一種推算導航,定位誤差會隨時間的積累而發散,長時間工作會產生很大的積累誤差,大航程彈道測量的精度明顯降低[9-10]。
本文提出一種基于最優模糊系統的慣導測量彈道修正模型,通過遙測彈道數據和高精度GNSS數據構造的輸入-輸出數據對模糊系統進行設計,將復雜的測量環境誤差、設備誤差、計算模型誤差等顯性或隱性誤差嵌入到模糊規則中,通過試驗歷史數據的訓練,建立慣導測量彈道數據轉化為高精度外彈道測量數據的知識規則庫,將知識規則庫中的模糊規則用于彈道修正模型最優模糊系統的參數,遞推實現慣導測量彈道數據的修正。
1 最優模糊系統
模糊系統由模糊規則庫、模糊推理機、模糊器和解模糊器4個部分組成[11],如圖1所示。
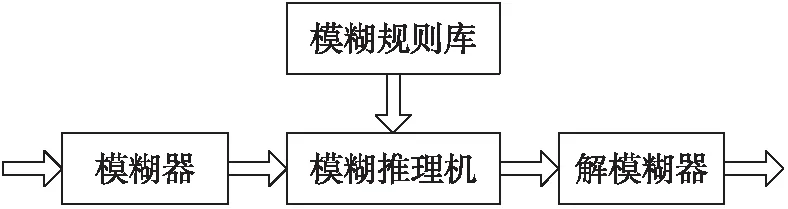
圖1 模糊系統結構



最優模糊系統的構造如下:
(1)
模糊系統由N條規則構造,采用了乘積推理機、單值模糊器、中心平均解模糊器[12]。f(X)是一個廣義的非線性回歸函數,通過調整平滑參數σ能夠以任意精度擬合所有的輸入-輸出數據對。
2 最近鄰聚類法模糊系統設計
公式(1)所述最優模糊系統中,每個輸入-輸出數據對都對應一條規則,當輸入-輸出數據對數目很大時,系統會變得非常復雜。因此,需要在計算精度允許的范圍內,將相近或相似的規則組合為一個規則,從而達到減少規則數目,降低系統復雜性,提高計算效率的目的。通過聚類技術,使模糊系統中的一條規則應用于一組數據,可以降低系統復雜性,增強系統設計的有效性,提高計算效率。本文采用最近鄰聚類法[13-14]實現模糊規則的規約。該方法首先把第1個數據作為第1組的聚類中心,如果一個數據與該聚類中心的距離小于某個預期值,就把這個數據放到該組中;否則,把該數據設為新的一組數據的聚類中心。詳細的算法如下。





步驟3。若k=N,則算法結束;否則,k自增1,返回步驟2。
由模糊規則庫構建模糊系統:
(2)

3 模型設計及驗證
以導彈飛行試驗慣性高度修正為例,根據GNSS發射坐標系高度一階差分序列y′、慣導測量垂直速度vy,建立由如下差分方程描述的離散時間非線性系統:
y′(k+1)=f(y′(k),… ,y′(k-τ+1),vy(k),…,vy(k-μ+1))
(3)

(4)
(5)
以某型裝備試驗歷史數據為樣本數據,依據各測量參數的取值范圍,采用改進的區間值化處理方法[15-16]對各測量參數進行無量綱的規范化處理。其變換公式為
(6)
式中:z(k)為式(4)中的測量序列,zu為測量序列的測量上限,zd為測量下限。令τ=2,μ=1,再根據式(4)、式(5)構造輸入-輸出數據對;令聚類半徑rc=1.0×10-6,用最近鄰聚類法訓練模糊系統的參數,建立慣導高度修正模型的模糊規則庫。
為了驗證所設計的模糊規則庫及模糊系統的有效性,對未訓練的試驗數據進行處理。隨著訓練數據的增加,模糊規則的數目會很多,如果用全部參數進行計算,會增加計算量。為此,設定規則遴選半徑rs,將聚類中心與輸入數據的距離小于遴選半徑rs的規則遴選出來作為模糊系統的參數,并用平滑參數σ調節輸出的平滑性,令rs=2.5×10-5,σ=1.0×10-7。模糊系統的輸出數據為高度差分信號,獲取彈道高度信號需要進行累加運算,其中初始值采用精度較高的GNSS高度。分別對全程、初段、中段、末段彈道慣導高度進行修正仿真測試,結果如圖2所示。
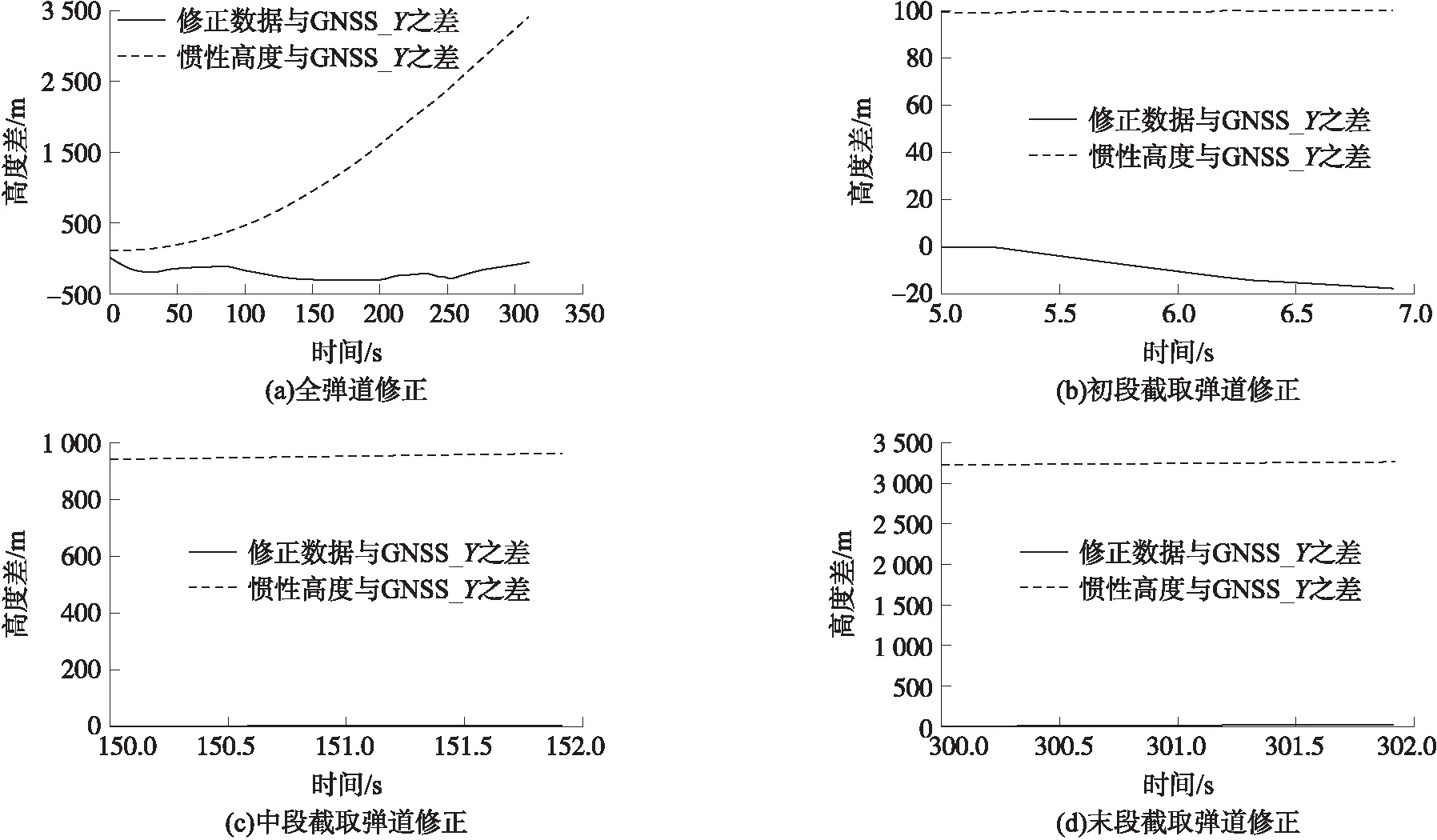
圖2 彈道修正模型測試
從全彈道和截取段落的慣性高度修正結果來看,通過基于最優模糊系統建立的高度修正模型,能夠將慣導測量的數據修正為具有較高精度的發射坐標系高度數據,明顯改善了慣導測量數據處理結果的精度。
4 結論
本文方法實質上是構建了由一個數據空間轉換到另一個數據空間的非線性系統函數,將彈道數據處理中需要考慮的測量設備、光電波折射、時間不對齊、計算模型等顯性或隱性誤差嵌入到模糊規則庫中,實現位置、速度、加速度等慣導測量彈道數據的高精度修正,修正模型可用于實時或事后彈道數據的計算,補全光測和GNSS測量缺失段落的彈道數據,修正慣導測量彈道數據隨時間累積的誤差。由于模糊規則庫是基于歷史數據訓練建立的,當新的慣導數據超出已有的訓練數據空間范圍時,不能實現正確的修正,需要擴大訓練數據的空間。另外,本文方法亦受訓練目標數據精度的影響。隨著北斗系統的廣泛應用,可獲得更高精度的彈道數據,通過高精度訓練數據的規則學習,修正模型的精度也會相應提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02