基于逐級離散相關法的機器人動態(tài)目標跟蹤定位算法
2021-04-07 08:59:30周恒,蔡云
內蒙古民族大學學報(自然科學版) 2021年1期
周 恒,蔡 云
(安徽三聯(lián)學院服務機器人應用技術協(xié)同創(chuàng)新中心,安徽 合肥,230601)
0 引言
隨著人工智能控制技術的發(fā)展,機器的智能性越來越強,機器人系統(tǒng)逐步得到發(fā)展[1].采用遙控遠程控制方式進行機器人的跟蹤控制,提高機器人的智能控制能力.在進行自主遙控輪式機器人設計中,需要分析機器人的定位軌跡,從而指導自主遙控輪式機器人的優(yōu)化控制,采用模糊跟蹤控制和信息融合方法,實現(xiàn)自主遙控輪式機器人的智能控制,構建自主遙控輪式機器人智能定位模型,結合相關的機器人控制算法,進行自主遙控輪式機器人智能定位設計,提高自主遙控輪式機器人的智能定位和軌跡跟蹤能力,通過軌跡跟蹤優(yōu)化,提高自主遙控輪式機器人的動態(tài)識別能力,相關的自主遙控輪式機器人跟蹤定位方法研究受到人們的極大關注.在機器人目標跟蹤定位算法研究方面,國外的研究起步較早,相應的研究成果也較多,典型的研究成果包括基于雙目視覺技術的定位算法、基于粒子濾波技術的定位算法等.而國內這方面的研究起步較晚,但發(fā)展速度較快,針對機器人目標跟蹤定位方面也提出了比較完善的理論.然而國內的研究工作暫時停留在理論層面,在應用過程中依舊會出現(xiàn)跟蹤定位精度低的問題.以解決當前計算機目標定位方法中存在問題為目的,本文提出基于逐級離散相關法的機器人動態(tài)目標跟蹤定位算法.以期實現(xiàn)機器人的動態(tài)參量融合和穩(wěn)定跟蹤控制.
1 自主遙控輪式機器人的被控對象及參數(shù)分析
1.1 自主遙控輪式機器人的被控對象模型
為了實現(xiàn)自主遙控輪式機器人的智能控制和動態(tài)目標跟蹤,采用智能激光定位方法進行機器人的路徑尋優(yōu),結合電勢場特征分析方法[2]進行自主遙控輪式機器人的動態(tài)路徑跟蹤控制,建立輪式移動機器人的動態(tài)參數(shù)融合模型,對自主遙控輪式機器人進行動態(tài)目標跟蹤定位控制,得到軌跡跟蹤模型如圖1所示.
建立自主遙控輪式機器人的控制力學參數(shù)分析模型,采用高精度地圖的SLAM定位方法進行自主遙控輪式機器人的互動檢測,進行自主遙控輪式機器人的信息融合識別,采用傳感器信息采集的方法,構建自主遙控輪式機器人的運動參數(shù)分析模型,提取自主遙控輪式機器人的運動參數(shù),得到自主遙控輪式機器人的傳感參數(shù)量化特征集合為Ss,其中有n個自變量樣本,采用模糊狀態(tài)特征識別方法進行自主遙控輪式機器人的運動學參數(shù)分析,運動參數(shù)分布矩陣為:

采用模型信息融合方法,建立自主遙控輪式機器人的動態(tài)跟隨模型,結合動態(tài)空間分塊區(qū)域匹配的方法,進行自主遙控輪式機器人的動態(tài)目標跟蹤定位控制,得到動態(tài)目標跟蹤定位控制自適應控制矩陣Q,結合Lyapunov正定性原理,得到自主遙控輪式機器人的穩(wěn)態(tài)性特征量,存在Q的逆矩陣Q-1,并Q-1同時也為自主遙控輪式穩(wěn)定性跟蹤的正定矩陣.定義自主遙控輪式的慣性力矢量和轉矩矢量:

通過對自主遙控輪式的運動狀態(tài)量融合,進行自主遙控輪式的自主尋優(yōu)控制,提高自主遙控輪式的主動定位能力.
1.2 運動參數(shù)特征分析
建立自主遙控輪式機器人的空間姿態(tài)信息采樣模型,結合信息素導引控制方法進行自主遙控輪式機器人的輸出慣性參量融合,提取自主遙控輪式機器人的關聯(lián)規(guī)則特征量,自主遙控輪式機器人的空間融合特征量滿足:

使用標準卡爾曼濾波器進行自主遙控輪式機器人的參數(shù)融合,提取自主遙控輪式機器人的位姿參數(shù)特征量,采用傳感慣性跟蹤識別方法,進行自主遙控輪式機器人的位姿定位,獲得的實際軌跡位姿,通過Q"計算逆矩陣,得到自主遙控輪式機器人移動軌跡分布特征量描述為:

其中,x(k)∈Rn×1為自主遙控輪式機器人移動特征狀態(tài),A(k)∈Rn×n為小擾動作用下自主遙控輪式機器人的擾動特征量[3],根據(jù)上述分析,構建自主遙控輪式機器人的被控對象模型,提取自主遙控輪式機器人的運動參數(shù).設F:R→P(R)為自主遙控輪式機器人的輪式移動慣性軌跡,如果?x0∈R且?x0∈R1,則自主遙控輪式機器人的目標位姿參數(shù)分布滿足?x0∈R2時,有:

則F在B(x,u)處自主遙控輪式機器人的力學分布滿足穩(wěn)定性收斂條件,對于機器人的移動軌跡點t=0,1,…,k,采用測度分析方法,得到自主遙控輪式機器人的優(yōu)化定位參數(shù)為Zk={z0,z1,…,zk},當b>a時,自主遙控輪式機器人的慣性參量為:

而?x,p>0,u>0 條件成立時,自主遙控輪式機器人運動動能滿足:

采用SLAM算法進行自主遙控輪式機器人的地圖定位[4-5],自主遙控輪式機器人定位的穩(wěn)定性跟蹤條件滿足,則:

根據(jù)上述分析,建立自主遙控輪式機器人的參數(shù)融合模型,根據(jù)參數(shù)定位和融合分析結果,提高自主遙控輪式機器人的跟蹤定位能力.
2 自主遙控輪式機器人的動態(tài)目標跟蹤
2.1 機器人激光定位解擾控制
提取自主遙控輪式機器人的關聯(lián)規(guī)則特征量,結合模糊PID控制方法進行自主遙控輪式機器人的輸出穩(wěn)定性控制,目標跟蹤定位的關聯(lián)矢量:

結合信息素導引控制方法進行自主遙控輪式機器人的輸出慣性參量融合,自主遙控輪式機器人控制系統(tǒng)為一個反演閉環(huán)控制系統(tǒng)[6-7],得到反演控制約束特征量滿足如下條件:
結合模糊PID控制方法進行自主遙控輪式機器人的輸出穩(wěn)定性控制,提取機器人的動態(tài)參數(shù)[7].對于機器人處于欠驅動模式下滿足?i∈Ss,得到自主遙控輪式機器人的輸出轉矩矢量為[9]:

根據(jù)拉格朗日建模法,進行自主遙控輪式機器人的尋優(yōu)控制,得到特征量滿足,采用擾動抑制方法,輸出的穩(wěn)定性參數(shù)滿足.獲得機器人輪式跟蹤的比例-積分項[10-11],采用慣性尋優(yōu),實現(xiàn)自主遙控輪式機器人的輸出穩(wěn)定性控制,得到解擾控制輸出為:

其中,Levf表示機器人的逐級離散關聯(lián)特征量,提取機器人的動態(tài)參數(shù),采用參數(shù)融合方法進行機器人的動態(tài)參數(shù)尋優(yōu),提高機器人的自主定位能力[12-13].
2.2 機器人的目標跟蹤定位
本文提出基于逐級離散相關法的機器人動態(tài)目標跟蹤定位算法,引入逐級離散相關法進行慣性尋優(yōu),得到穩(wěn)定性適應特征解在坐標系中滿足Ox1y1z1,構造機器人動態(tài)目標軌跡跟蹤模型為:

假設自主遙控輪式機器人模型由2個相同的約束特征量構成[13],假設Ss為擾動矩陣,采用自適應魯棒控制方法進行自主遙控設計,得到融合跟蹤參數(shù)集為:

其中,P、R為自主遙控輪式機器人運動的姿態(tài)參量矩陣,在限定初始條件下,自主遙控輪式機器人的動態(tài)目標跟蹤定位優(yōu)化參數(shù)為[14]:

其中,w(k)∈Rn表示自主遙控輪式機器人姿態(tài)陀螺測量值,綜上分析,采用參數(shù)融合方法進行機器人的動態(tài)參數(shù)尋優(yōu),實現(xiàn)自主遙控輪式機器人的動態(tài)參量融合和穩(wěn)定跟蹤控制,采用逐級離散相關法[15]實現(xiàn)機器人動態(tài)目標跟蹤定位.
3 仿真實驗
實驗中使用的自主遙控輪式機器人如圖2所示.在執(zhí)行跟蹤定位算法之前設置實驗對象機器人的基本結構參數(shù),具體的設置情況如圖3所示.
定位算法仿真程序為Matlab,自主遙控輪式機器人的運行場地區(qū)域大小為100 m×100 m,模糊尋優(yōu)的迭代步數(shù)為120,干擾強度為15 dB,信息素導引的空間分布系數(shù)為0.48,根據(jù)上述參數(shù)設定,進行仿真測試分析.

圖2 自主遙控輪式機器人實例Fig. 2 Example of autonomous remote control wheeled robot

圖3 實驗對象結構參數(shù)設置Fig. 3 Experimental object structure parameter setting
采用模糊狀態(tài)特征識別方法進行自主遙控輪式機器人的運動學參數(shù)分析,建立自主遙控輪式機器人的空間姿態(tài)信息采樣模型,實現(xiàn)自主遙控輪式機器人的動態(tài)定位,得到自主遙控輪式機器人的目標跟蹤定位結果如圖4所示.
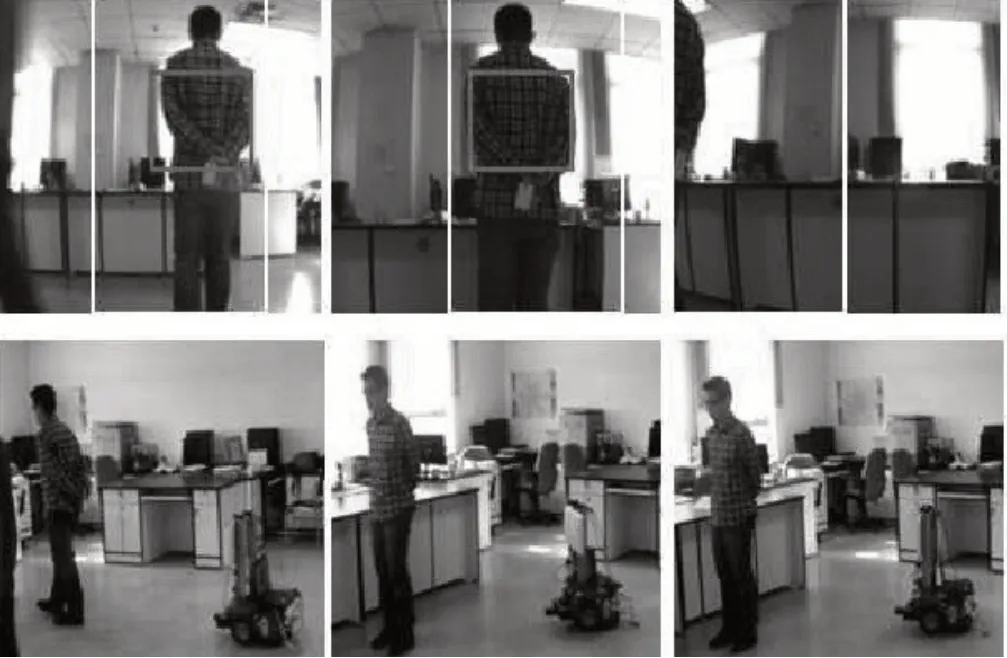
圖4 機器人的目標跟蹤定位實驗結果圖Fig. 4 Experimental results diagram of robot target tracking and positioning
結合信息素導引控制方法進行自主遙控輪式機器人的輸出慣性參量融合,提取自主遙控輪式機器人的關聯(lián)規(guī)則特征量,實現(xiàn)自主遙控輪式機器人的動態(tài)目標跟蹤定位,得到其定位路徑過程結果如圖5所示.

圖5 機器人動態(tài)目標跟蹤定位路徑過程Fig. 5 Robot dynamic target tracking and positioning path process
分析圖4得知,采用本文方法能有效實現(xiàn)機器人動態(tài)目標跟蹤定位,測試定位精度.為進一步分析本文方法的有效性及可行性,本實驗將以跟蹤定位錯誤率及時間開銷作為本次實驗指標,進行仿真.
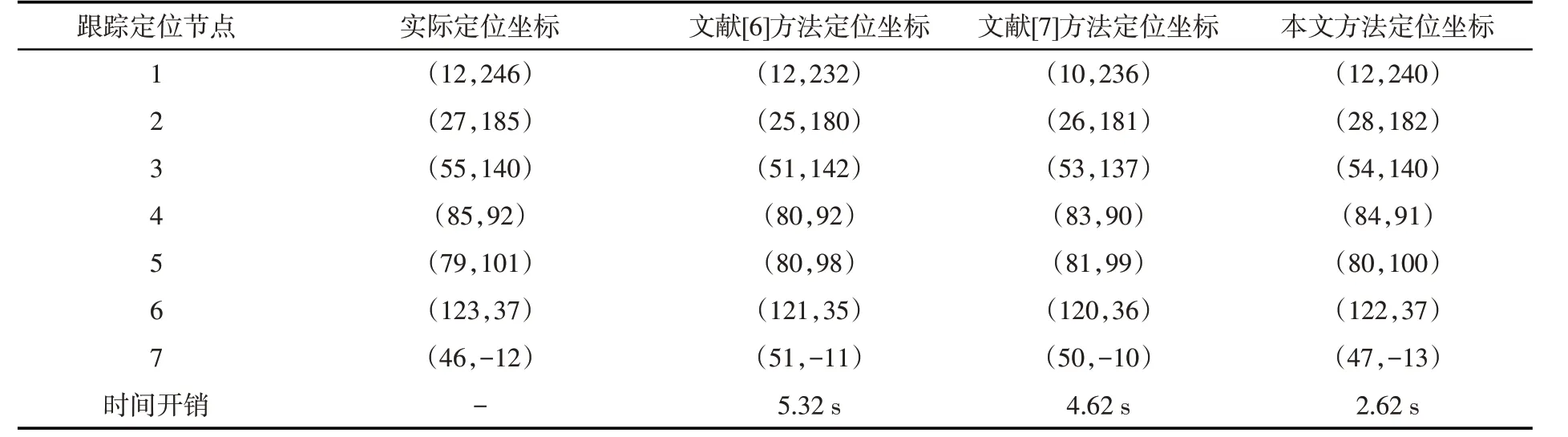
表1 不同方法的跟蹤定位錯誤率及時間開銷Tab. 1 Tracking and location error rate and time overhead of different methods
通過對表1中數(shù)據(jù)的統(tǒng)計計算,發(fā)現(xiàn)本文方法的定位誤差為2 cm,而文獻[6]方法和文獻[7]方法得出的定位結果的平均誤差分別為5.33 cm和4.67 cm.另外從時間開銷統(tǒng)計數(shù)據(jù)上可以看出,與文獻[6]方法和文獻[7]方法相比,本文的時間開銷分別節(jié)省了2.7 s和2.0 s.由此可知,相比于文獻[6]和文獻[7]中提出的方法,本文動態(tài)目標跟蹤定位算法的定位錯誤率更低,時間開銷更小,這是由于本文方法在進行機器人動態(tài)目標跟蹤定位時首先進行了機器人激光定位解擾控制,并考慮擾動矩陣采用自適應魯棒控制方法進行自主遙控設計,融合跟蹤參數(shù).在限定初始條件下優(yōu)化融合參數(shù),以降低自主遙控輪式機器人的動態(tài)跟蹤定位錯誤率,并減少跟蹤定位所需時間開銷,以此提升工作效率.
4 結語
本文提出基于逐級離散相關法的機器人動態(tài)目標跟蹤定位算法.采用傳感器信息采集的方法,構建自主遙控輪式機器人的運動參數(shù)分析模型,提取自主遙控輪式機器人的運動參數(shù),采用測度分析方法,得到自主遙控輪式機器人的優(yōu)化定位參數(shù),采用參數(shù)融合方法進行機器人的動態(tài)參數(shù)尋優(yōu),實現(xiàn)自主遙控輪式機器人的動態(tài)參量融合和穩(wěn)定跟蹤控制,采用逐級離散相關法實現(xiàn)機器人動態(tài)目標跟蹤定位.分析得知,本文方法進行機器人動態(tài)目標跟蹤定位的精度較高,且所需時間開銷較小.
猜你喜歡
今日農業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56