下肢骨盆控制康復機器人訓練對腦卒中患者平衡功能和步行能力的影響
2021-04-10 09:58:34林在龍朱雯吳華顧旭東傅建明姚云海李輝李巖柏和風
浙江醫學 2021年6期
關鍵詞:康復
林在龍 朱雯 吳華 顧旭東 傅建明 姚云海 李輝 李巖 柏和風
腦卒中后約3/4 的患者因肌力、肌張力的改變及異常運動模式致其步態穩定性下降,而步行是多關節和肌群的周期性協調運動,要求機體有足夠的支撐能力與平衡能力[1]。骨盆作為人體承上啟下的重要結構,對于腦卒中患者維持平衡功能和步行能力有著重要影響。下肢遠端的肢體活動以近端的骨盆運動為基礎,步行時,骨盆隨人體運動產生周期性側傾、旋轉和水平移動,此時人體具有良好的協調與平衡功能。腦卒中患者因中樞神經系統損傷,骨盆的姿勢控制系統被破壞[2],骨盆運動失去協調與平衡,從而影響下肢步行功能。以往步行訓練側重下肢運動功能訓練而容易忽略骨盆控制對步態的影響,因而容易出現異常運動模式,治療效果欠佳。近年來下肢康復機器人輔助步行訓練越來越得到重視,其中下肢骨盆控制康復機器人訓練使步行中骨盆得到良好的控制,可有針對性地糾正偏癱側下肢異常運動模式[3]。因此本研究應用下肢骨盆控制康復機器人對患者的步行訓練進行干預,觀察該方法對腦卒中患者平衡功能和步行能力的影響,現報道如下。
1 對象和方法
1.1 對象 選取2016 年3 月至2017 年3 月嘉興市第二醫院康復醫學中心收治的腦卒中患者50 例。納入標準:(1)首次腦出血或者腦梗死并經頭顱CT 或MRI 檢查證實;(2)有肢體功能障礙并已給予常規康復訓練者,患者下肢Brunnstrom 分期為Ⅱ期以上;(3)年齡<65歲;(4)生命體征穩定,血壓控制在正常范圍內,心功能良好者;(5)意識清醒,愿配合康復治療者;(6)患者病程均<12 周,血壓控制在正常范圍,無心肌梗死、心絞痛等發作,心功能良好,無其他限制活動的合并癥。所有患者均知情同意,本研究經本院醫學倫理委員會批準。采用隨機數字表法將所有患者分為實驗組和對照組,每組25 例,兩組患者一般資料比較差異均無統計學意義(均P >0.05),見表1。
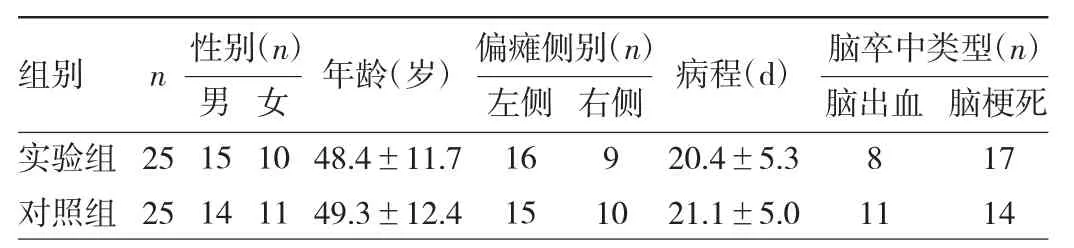
表1 兩組患者一般資料比較
1.2 治療方法 兩組患者均給予常規藥物治療和康復訓練,包括髖膝踝關節控制訓練、肌力訓練、橋式訓練、翻身訓練、坐-站位轉移訓練、站立平衡訓練、單腿負重訓練、上下樓梯訓練、邁步步行訓練等[4];其中對照組患者訓練每次50 min,1 次/d,5 次/周,為期8周,實驗組患者訓練每次30 min,1 次/d,5 次/周,為期8周。
實驗組患者在常規康復訓練基礎上增加由上海電氣集團股份有限公司研發的下肢骨盆控制康復機器人輔助步行訓練,每次20 min,1 次/d,5 次/周,為期8 周。該機器人由跑臺、骨盆減重控制裝置和操作平臺組成,通過可調節的骨盆控制裝置和運動跑臺,幫助患者主動或在部分輔助下模擬正常人行走時的骨盆運動角度和步態周期進行訓練;訓練前治療師向患者說明跑臺工作方式及注意事項,然后患者通過臺階轉移至跑臺上,將骨盆控制裝置根據其身高調整至合適高度,將減重腰帶通過腹股溝將患者骨盆部分進行固定,通過電腦平板設置減重量(根據體重10%~20%)、步行速度、訓練時間等參數,啟動跑臺進行步行訓練,治療師在患側指導患者進行邁步,根據需要治療師可用手控制患者踝關節抑制患足內翻改善廓清障礙;其中不同康復階段的患者可制定不同的訓練模式,包括步速(一般從低速開始0.2 km/h),骨盆的旋轉、側傾、水平位移幅度范圍、訓練時間以及減重量等參數。
兩組患者在訓練過程中若出現頭暈、心率加快,血壓波動等呼吸、循環系統反應,應立即中止訓練并給予相應處理,訓練過程均在治療師監控安全前提下進行。
1.3 療效評定方法 兩組患者在治療前1 周先對觀測指標進行基礎測評,再于治療8 周后對觀測指標進行測評,以評定療效。(1)采用Rivermead 運動指數(RMI)評分評定患者翻身、轉移、上下樓梯、獨立行走、跑步等15項日常生活活動能力,能完成得1 分,不能完成得0 分,總分15 分[6];(2)采用Berg 平衡量表(Berg balance scale,BBS)評定平衡功能(總分56 分),分值越高平衡功能越好;(3)采用功能性步行量表(FAC)分級對患者下肢步行能力進行評定,0 級:不能行走或>1 人扶持下步行;1 級:需在1 人減重扶持下步行;2 級:需間斷肢體接觸幫助下步行;3 級:需在他人監督及口令指導下步行;4 級:在平坦地面上能獨立步行,但在上下樓梯時需幫助;5 級:完全獨立步行[5];將3~5 級患者歸為具有獨立步行能力,計算獨立步行百分比;(4)采用廣州章和電氣的Gait watch 步態分析系統采集步長、步頻、步速數據進行評估,將3 塊傳感器分別綁在患者髖、膝、踝部,囑患者自然狀態下完成12 m 直線距離的行走,數據同步上傳于電腦形成步行曲線圖和動態三維圖,治療師從中提取主要參數進行數據比較[7]。
1.4 統計學處理 采用SPSS 17.0 統計軟件。計量資料以表示,組間比較采用兩獨立樣本t 檢驗,組內治療前后比較采用配對t 檢驗;計數資料用率表示,組間比較采用χ2檢驗。P<0.05 為差異有統計學意義。
2 結果
2.1 兩組患者治療前后RMI 評分比較 兩組治療前RMI 評分比較差異無統計學意義(P >0.05);治療后兩組RMI 評分較治療前均明顯上升,差異均有統計學意義(均P<0.05),實驗組較對照組RMI 評分更高,差異有統計學意義(P<0.05),見表2。
2.2 兩組患者治療前后BBS 評分比較 兩組治療前BBS 評分比較差異無統計學意義(P >0.05);兩組治療后BBS 評分較治療前均明顯增高,差異均有統計學意義(均P<0.05),實驗組較對照組BBS 評分更高,差異有統計學意義(P<0.05),見表3。

表2 兩組患者治療前后RMI 評分比較(分)

表3 兩組患者治療前后BBS 評分比較(分)
2.3 兩組患者治療前后獨立步行百分比比較 兩組患者治療前獨立步行百分比比較差異無統計學意義(P >0.05);兩組治療后獨立步行百分比較治療前均明顯增高,差異均有統計學意義(均P<0.05),且實驗組獨立步行百分比較對照組更高,差異有統計學意義(P<0.05),見表4。
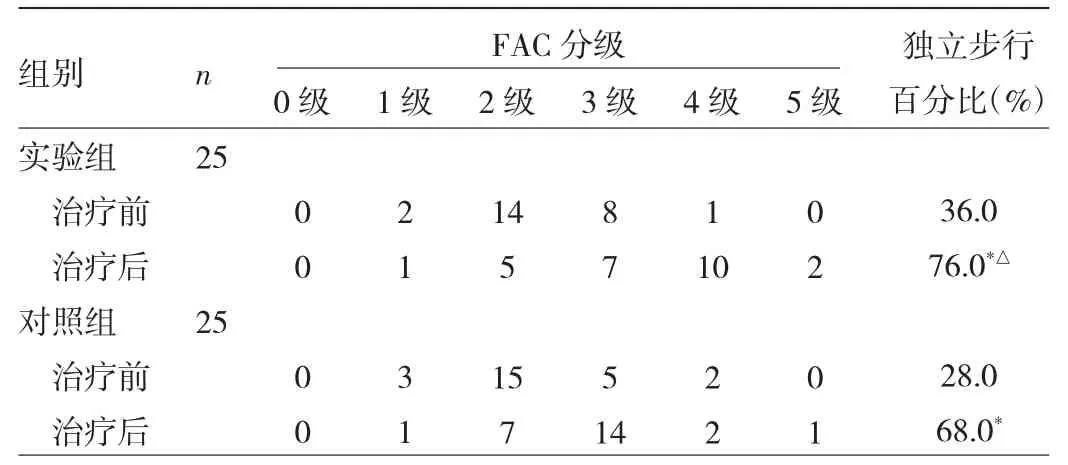
表4 兩組患者治療前后獨立步行百分比比較(例)
2.4 兩組患者治療前后步長、步頻、步速比較 兩組患者治療前步長、步頻、步速比較差異均無統計學意義(均P >0.05);兩組治療后步長、步頻、步速較治療前均明顯上升,差異均有統計學意義(均P<0.05),實驗組較對照組步長、步頻、步速均更優,差異均有統計學意義(均P<0.05),見表5。
3 討論
隨著人們生活水平提高,腦卒中患者回歸社會、社區及家庭的自我期望也隨之增強[8]。臨床中發現,腦卒中患者下肢運動功能較上肢功能尤其是手的精細活動在恢復時間上具有優勢,且難易程度較低,治療效果較好[9-10]。目前臨床上對于此類患者多采取傳統康復方法,即通過指導患者進行平衡和步態訓練,避免代償姿勢,為腦卒中患者提供正確的協調與平衡感覺輸入,糾正下肢錯誤運動模式。但在徒手訓練過程中,治療師既要保證患者安全又要進行步態指導,存在安全隱患,且難以控制患者骨盆運動及步行周期中雙側下肢的支撐和擺動。臨床訓練中因注重下肢運動功能的訓練而容易忽略骨盆訓練[11],從而導致患者步態改善不明顯。研究表明軀干與骨盆控制能力是機體平衡及步行運動能力的綜合反映[12],骨盆帶及周圍肌群屬于人體核心部位,為肢體功能動作提供支持,保證上下軀干傳導動作的發揮。肢體的隨意運動是以近端穩定性為基礎的,運動發育遵循從上至下、由近及遠的原則[13],因此軀干和骨盆的穩定決定了下肢協調運動和步行穩定[14-15]。腦卒中可導致中樞神經系統損傷,繼而影響感覺整合與運動輸出,降低骨盆及周圍肌群的運動反饋,使得患者的平衡功能受到巨大影響,身體穩定性及協調能力喪失以至于無法維持步行過程中的正常姿勢和身體重心,因此需要一個在保證訓練安全的同時可以強化患者骨盆控制能力的平臺進行步行訓練,下肢骨盆控制康復機器人滿足這一要求。
本研究采用上海電氣集團股份有限公司研發的下肢骨盆控制康復機器人。該機器人骨盆控制裝置根據人體骨盆運動生物力學設計,人體軀干在正常情況下行走時骨盆兩側旋前和旋后區域控制在-4°至+4°,盆骨前后、上下、左右3 個軸方向的運動呈正弦波形曲線運動[16]。該設計可使得患者在步行訓練過程中重心可以在安全范圍內進行移動和調節,減重腰帶的控制裝置不同于臨床上常見的外骨骼固定式機器人,該裝置具有減重支持、不限制患者骨盆正常運動等優點,從而有效降低軀干運動時的能量消耗,降低步行難度,增強患者信心。根據腦卒中典型的偏癱步態特點,患者在行走時,兩側肢體呈非對稱性擺動,有研究顯示,這是因為偏癱患者雙足支撐相延長至60%~65%,擺動期均縮短至35%~40%,若要從根本上改善步行能力,則需要加強患側下肢載重能力,延長患肢負重時間[17]。該機器人可替代治療師以達到保護患者的目的,且治療師可通過控制患者踝關節延長患足支撐地面的時間來增加該側肢體的負荷,引導患者將步長、步頻、步速等控制在正常范圍[18]。同時在患者發病后,損傷的腦神經可以進行自我修復,一些膠質細胞被喚醒,神經生長因子不斷增長,使得中樞神經系統逐漸發揮其功能價值。下肢骨盆控制康復機器人的介入可以不斷地增加上述信息刺激的輸入,有利于提高神經功能可塑性。

表5 兩組患者治療前后各步態數據比較
腦卒中最佳恢復黃金階段為起病后3 個月內,此后肢體恢復將進入平臺期,故本研究選取病程在3 個月內、具備一定步行能力且存在異常運動模式的患者作為研究對象來觀察下肢骨盆控制康復機器人的步行訓練的效果。本研究發現,經治療8 周后,兩組患者RMI、BBS 評分、獨立步行百分比、步長、步頻、步速較治療前均顯著改善,進一步組間比較發現,治療8 周后實驗組患者上述療效指標均優于對照組,證明在常規干預基礎上輔以下肢骨盆控制康復機器人訓練能進一步提高偏癱患者下肢運動能力,與國內相關報道一致[19-20]。康復是一個漫長的過程,傳統的康復治療方法千篇一律,治療師與患者一對一的早期步行訓練存在較大跌倒風險,針對腦卒中偏癱步態的訓練不管在內容還是時間上均難以滿足患者及家屬的治療需求。該機器人步行訓練系統可定時、量化訓練,側重骨盆控制下的步行協調性和安全性[21]。通過骨盆控制機制,可有效改善患者平衡能力,提供安全平臺進行步態糾正,通過減重系統減少患側支撐降低步行訓練難度,從而提高步行功能。
綜上所述,基于骨盆控制減重系統原理的下肢康復機器人訓練可有效改善患者的平衡功能與步行能力,并且相比早期外骨骼式機器,下肢骨盆控制機器人為患者骨盆和下肢提供了更大活動自由度。但該機器人尚有不足之處,首先其對于軟癱期患者無法進行訓練;其次,若能在治療過程中結合心電反饋,第一時間了解患者身體運動情況,了解機器人訓練對心肺功能的影響,將更加有助于卒中后患者的恢復。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45