智能變電站視頻監控系統運維態勢智能感知方法
2021-04-13 13:42:52謝肇軒
通信電源技術 2021年20期
謝肇軒
(廣東電網有限責任公司東莞供電局,廣東 東莞 523000)
0 引 言
自21世紀起,人工智能技術得到了飛速的發展,推動了人們日常生活的現代化發展進程。現代電力企業作為影響國民經濟發展的重要基礎產業,關系到全世界人們的生活與辦公,自然而言地成為智能化技術應用的主戰場[1,2]。在國家大力推廣智能電網發展的時代背景下,變電站是衡量一個區域電力建設水平的重要指標。變電站是集合高新技術、運行監測設備的智能電網節點,以數字化、網絡化通信平臺作為基礎,是一種新型高級變電站。如今,在變電站的建設過程中使用傳統變電站作為基礎,同時使用先進的自動化技術,對傳統變電站進行智能化升級[3]。為了實現對此類變電站的科學監測,大量的專家學者構建了變電站視頻監控系統,以此推動變電站監測技術的發展。
由于變電站視頻監控系統多應用于遠程控制工作中,如此系統出現故障時,不宜及時對其展開維修。在以往的研究中也提出過一些解決方案,如文獻[4]中提出的使用增強現實技術對變電站相關系統設備進行仿真的監測方法。此方法僅能通過數據預測對視頻監控系統的運行狀態進行模擬,而無法獲取真實可靠的數據對系統的運維態勢進行分析。另外,文獻[5]中提出了一種使用人工智能代理實現配電系統相關設備負荷態勢感知的方法,此方法具有較高的負荷預測能力,但使用其對視頻監控系統展開運維態勢感知時,存在運維態勢智能感知相似度較低的問題。為此,在本次研究中提出了一種變電站視頻監控系統運維態勢智能感知方法,希望通過系統運行數據采集與分析的形式,獲取真實有效的系統運行數據,提高監控系統的維護能力與效率。
1 變電站視頻監控系統運維態勢智能感知方法設計
1.1 變電站視頻監控系統運行數據采集與分析
在對大量的案例進行分析后可以確定,當前大部分視頻監控系統運維態勢感知問題源于數據采集與處理技術的落后,為此在本次研究中將主要對這兩部分展開優化[6]。
本次研究中將使用傳感器與計算機對視頻監控系統的運行數據進行采集,由于視頻監控系統的運行數據種類較多,為保證數據采集結果可應用到后續的研究中,在此環節中將完成數據的預處理工作。由于采集到的數據類別較多且結構較為復雜,因此需要先完成數據清洗工作。將采集到的數據設定為C={s1,…,sn},其隸屬于數據集Di,根據窗口滑動原理對數據進行標記,滑動過程如圖1所示。
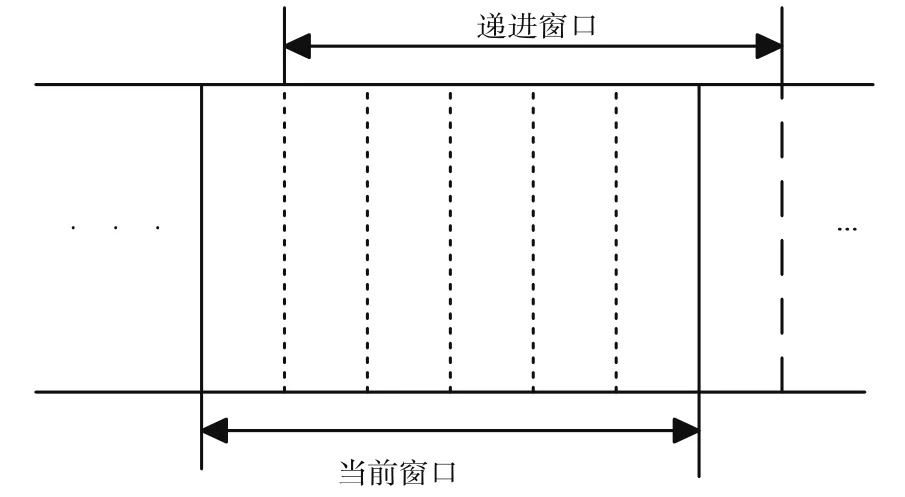
圖1 窗口滑動原理
根據圖1內容完成數據處理過程后,設定R(s)表示數據項中可標記的數據,f(s)表示標記R在R(s)出現的次數,則s與s'的文本內容相似度可表示為:

式中,s為采集到的文本數據;s'為標記后的文本數據。根據式(1)確定采集數據中的相似部分,并對其進行剔除,而后在數據剔除部分進行補位,保證本次處理過程中擁有充足的數據量。
使用FP-T多層關聯規則完成此部分處理過程[7,8]。將采集到數據匯總為數據庫的形式,并將數據分割為選項集,構建FP-T關聯分析模型。首先,計算各數據預選集合的支持數,并按照遞減的順序排列,則有:

式中,G表示數據組序號;n表示排列過程中的遞減順序。而后,根據此順序,對數據進行二次掃描。將第一類系統運維數據設定為E1={G1,Gi,…,Gm},按照式(2)的排列數據,將其體現為{G1,Gi,…,Gm},則此數據組別具有的第一層級可表示為:

根據式(3)與式(2)可得到運維數據的聚類分析樹,通過此樹狀結果確定數據的種類與歸屬,并以此作為后續感知過程的數據基礎。
1.2 視頻監控系統運維數據融合處理
使用上文中處理后的數據結合數據融合技術,實現運維數據的多元融合與分析。在對當前態勢感知方法的使用效果進行分析后發現,由于數據不能進行一致濾波造成了數據異常情況頻發[9]。因此,在本次研究中將主要構建一致濾波器,實現數據的統一處理。
以一致性算法作為基礎,采用分節點的形式對視頻監控系統數據展開處理[10,11]。設定處理后的數據初始狀態為αi(0),則經過濾波器的k次迭代后,輸出數據αi(k)可表示為:

式中,uii為加權系數;αi為原始數據值參數;uij為權重系數;αj為數據輸出參數。根據式(4)可得到αi(k)的輸出曲線,使用此曲線可對濾波結果的類別劃分進行判定,具體圖像如圖2所示。
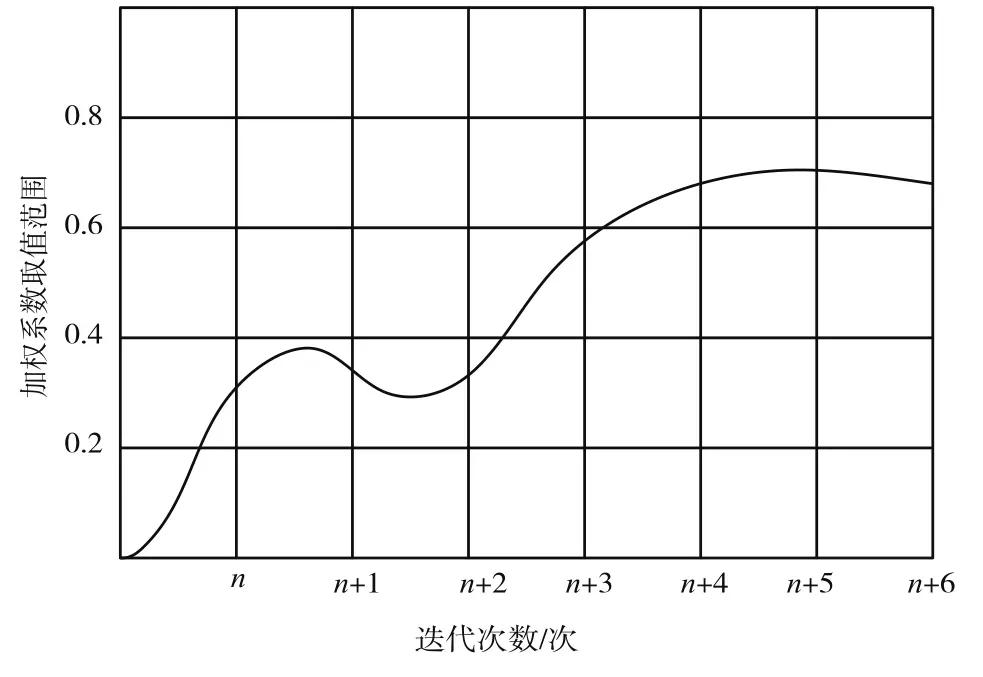
圖2 αi(k)輸出曲線
其約束條件可設定為:

本次研究中,使用Maximum-degree算法計算一致加權系數取值結果[12]。相應的公式為:
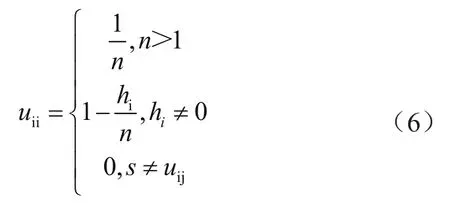
式中,n為自重權數;hi為數據處理程度屬性;s為加重權數。假設uij=0,根據式(6)可得到多維數據的融合處理結果,則有:

式中,U為非結構化數據數量;α為特征向量數據。將不同類別數據代入式(7)中完成加權迭代處理。當數據輸出形式為αn(k)時,數據逐漸趨于一致,則有:

此時,數據一致性濾波處理結束,將經過濾波處理的數據根據當前方法中的數據融合技術完成融合處理,得到態勢感知基礎數據庫。
1.3 視頻監控系統運維態勢智能感知
使用態勢感知基礎數據庫,對視頻監控系統運維態勢展開感知處理。在本次研究中,運維態勢感知過程通過趨勢提取方法完成,將視頻監控系統的運維態勢設定為時間距離函數,記作Y(t),對Y(t)進行多項式擬合,其趨勢可使用多項式參數進行驗證與識別[13,14]。假設Y(t)函數可分割為多個二階多項式并進行二次計算,在t時刻下,第i個數據片段Yi(t)可表示為:

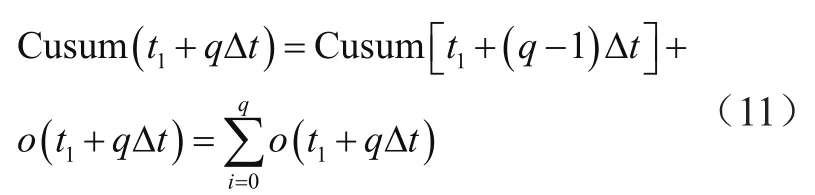
式中,χ= [χ0,χ1,χ2]表示此擬合多項式的參數。使用累積分割算法對Yi(t)展開分段提取[15]。如果在t1時刻對應的擬合函數為Yi(t1),數據采集時間間隔為Δt,則第q個采集時間間隔后,由式(9)計算得到的擬合值可表示為則此時擬合值與真實數據之間的誤差可表示為:

則從t1起,誤差絕對值的累積和可以表示為:
使用此公式可得到態勢感知類別劃分閾值,將此閾值帶入層次分析法中,運維態勢劃分過程如圖3所示。
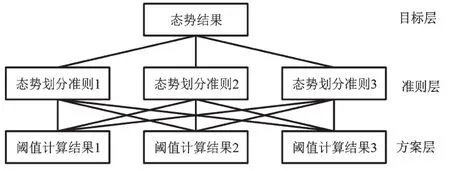
圖3 運維態勢劃分過程
根據圖3中預設的3個層級,確定主觀因素與客觀因素對運維態勢的影響,同時確定當前的運維態勢等級。可對視頻監控系統的運維態勢趨勢展開分析,并針對分析結果確定當前視頻監控系統運維態勢,完成態勢感知工作。對上文中設定的數據處理環節進行整合,將其融合到當前使用的感知方法中,至此實現變電站視頻監控系統運維態勢智能感知。
2 實驗分析
為了驗證變電站視頻監控系統運維態勢智能感知方法的有效性,在MATLAB仿真軟件中,分別采用所提方法、文獻[4]方法以及文獻[5]方法進行仿真對比實驗。
2.1 實驗對象設定
利用實驗室設備模擬變電站環境,將變電站視頻監控系統作為研究對象。為保證實驗的真實性,將變電站視頻監控裝置中央控制端與實驗平臺控制端有序連接。實驗平臺控制器如圖4所示。

圖4 實驗平臺控制器
本次實驗中將模塊化實驗系統作為實驗平臺控制器,其具有數據計算處理、模擬通信信號以及通信信號輸出的功能。利用此控制器結合MATLAB集成開發環境,設計出視頻監控系統的控制方法,在離線仿真完成后,利用實驗平臺設備接口代替仿真控制程序中的邏輯關系,采用實驗平臺的實時接口生成編程語言,通過數據通信的方式,對視頻監控系統進行實時控制。
2.2 實驗方案設計
將實驗過程設定為變電站視頻監控系統運維數據采集、運維數據預處理、隸屬函數的確定以及實驗結果輸出4部分,主要實驗流程設定如下。
首先,監控系統運維數據采集。利用與實驗平臺相連接的傳感器對監控系統進行數據采集,主要采集信息包括運行電壓、運行電流以及視頻圖像采集結果,并將此部分數據存儲在實驗數據庫中。其次,監控系統運維數據清洗。利用預先設定的數據預處理以及清洗方法,對采集到的異常數據進行處理,然后應用相應的技術對數據進行補全并展開數據融合處理,得到可供實驗使用的數據源。再次,利用既往數據構建歷史數據庫,為監控系統運維態勢感知提供基礎。選取以往的歷史數據,構建歷史數據庫,對此部分數據進行聚類處理,得到運維態勢模板數據庫,并以此作為運維態勢感知結果的判斷標準。最后,使用實驗中采集到的數據進行視頻監控運維態勢感知與識別,根據隸屬度計算公式確定監控系統運維狀態,并輸出結果。
根據上述設定的4個環節對實驗目標系統進行感知,并輸出相應的感知結果,將此部分數據存儲在對應的數據庫中,為所提方法的有效性驗證提供基礎。
2.3 實驗周期及相關參數設定
在本次實驗中,將實驗數據采集周期設定為1周,每天獲取變電站視頻監控系統的電壓、電流、視頻圖像采集效果以及工作溫度數據,并對采集到的單日數據進行匯總。實驗數據采集結果如表1所示。
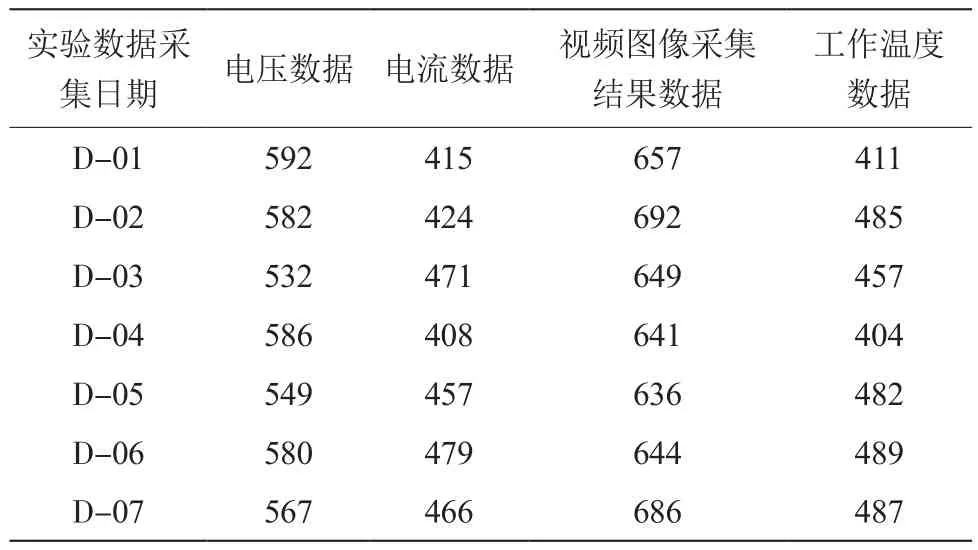
表1 實驗數據采集結果(單位:條)
將上述數據作為本次實驗的數據來源,與此同時,獲取20 000條真實變電站視頻監控系統運維數據,將此部分數據輸入MATLAB軟件中,使用K均值聚類算法對歷史運維數據進行聚類處理并導出聚類結果,使用云計算技術將其快速生成4類不同的系統運維態勢數據特征 (?1,?2,?3,?4),具體取值結果如表 2 所示。

表2 系統運維態勢數據特征
根據上述設定的視頻監控系統運維態勢數據特征,對實驗周期內視頻監控系統的運維態勢進行判定,得到相應的態勢感知結果如表3所示。
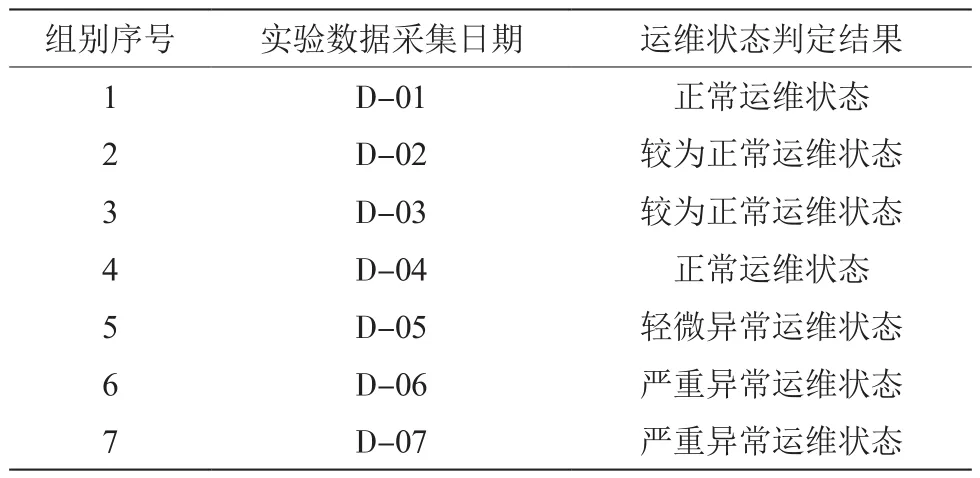
表3 視頻監控系統運維態勢判定結果
2.4 實驗對比指標設定
在本次實驗過程中,獲取運維態勢智能感知結果時,需要根據預設的數據庫確定不同時刻系統運行狀態與歷史數據庫類別劃分之間的隸屬度計算精度,具體計算公式為:

式中,xi為采集到的實驗數據;A表示不同類型的系統運維態勢數據特征;n表示計算次數。為確定判定結果與運維態勢感知結果之間的差異,將相似度作為實驗中的測定指標,具體計算公式為:
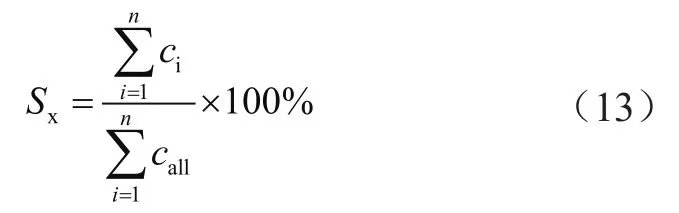
式中,ci表示實驗中運維態勢感知判定結果,call表示視頻監控系統真實運維態勢判定結果。
2.5 實驗結果分析
為了確保獲取準確的運維態勢智能感知結果,根據式(12)得到不同方法的隸屬度計算精度如圖5所示。
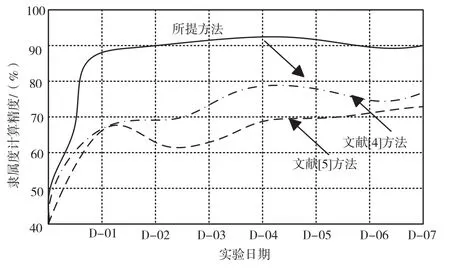
圖5 不同方法的運維態勢感知隸屬度計算精度
根據圖5可知,在7次實驗中3種方法的隸屬度計算精度差異較大。文獻[4]方法與文獻[5]方法的平均隸屬度計算結果精度分別為74%和68%,隸屬度計算結果精度相對較差,根據此隸屬度對態勢感知數據進行劃分會造成輸出結果可靠性下降的問題。而所提方法在7次實驗中,其平均隸屬度計算精度可達到90%,根據此計算結果可以較好地完成態勢感知過程。
將表3中數據作為本次實驗結果驗證的基礎,根據視頻監控系統真實運維態勢判定結果與不同方法的運維態勢感知結果進行對比,得到不同方法運維態勢感知對比結果如圖6所示。
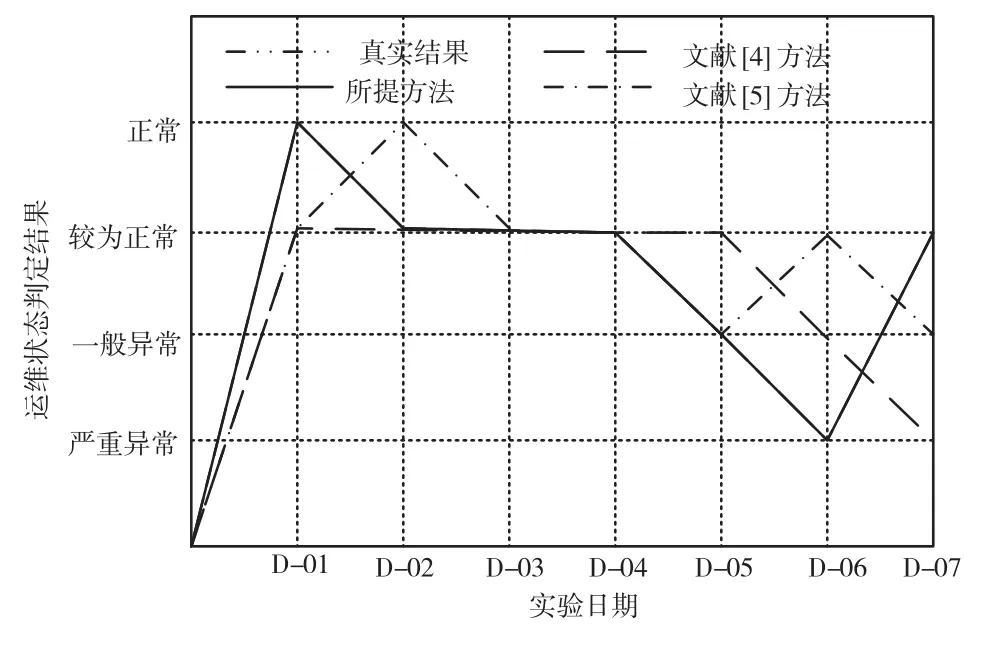
圖6 不同方法運維態勢感知對比結果
根據圖6中的實驗結果可以看出,3種運維態勢感知方法所得結果差異較大,為了更加清晰地確定不同方法的使用效果,根據式(13)計算不同方法判定結果與運維態勢感知結果之間的相似度,具體計算結果如表4所示。
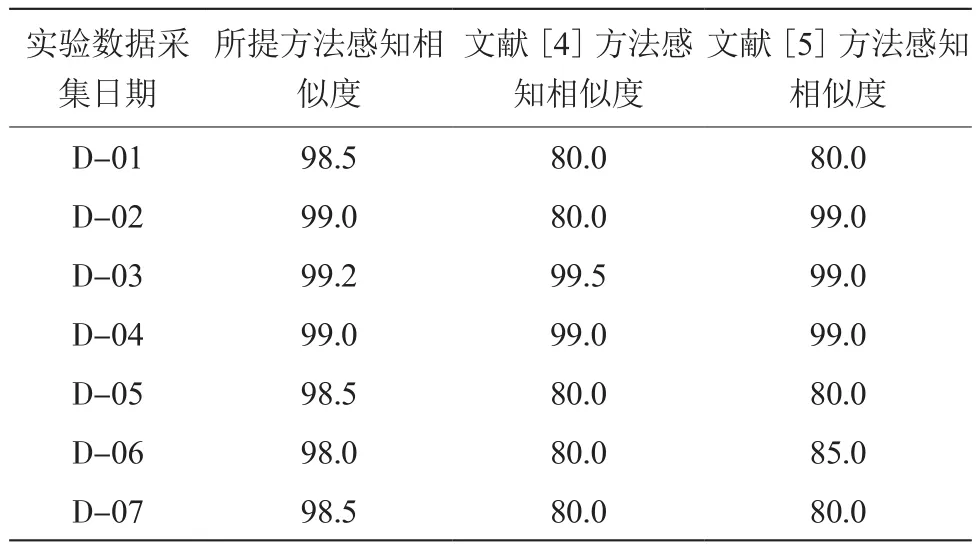
表4 不同方法的運維態勢感知相似度計算結果(單位:(%))
根據表4中的數據可知,所提方法所得結果與真實結果較為相似,其平均感知相似度可達98.7%,可見此方法使用后所得結果較為準確,可為變電站視頻監控系統的維護提供幫助。而文獻[4]方法與文獻[5]方法的平均感知相似度分別為85.5%和88.9%,在多次實驗中均出現了與真實結果差異性較大的問題。因此,依照上述分析結果可知,所提方法可彌補當前方法的不足,為變電站監控系統的運行維護提供幫助,并推動電網智能化發展的進程。
3 結 論
在此技術不斷革新的過程中,目前對使用視頻監控對變電站進行監管,為保證變電站的運行安全,需要設計一種科學有效的視頻監控系統運維態勢智能感知方法。在本次研究中提出了一種新型的態勢感知方法并取得了一定的應用效果,但由于技術上的限制,此方法還存在一些問題,在后續的研究中還需要對其進行完善與優化。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
河南電力(2015年5期)2015-06-08 06:01:45
