51單片機的智能小車控制系統(tǒng)中的應(yīng)用研究
2021-04-18 00:43:03索健章陳宇豪黃文萊陳志偉尹昭恒
科技研究·理論版 2021年18期
索健章 陳宇豪 黃文萊 陳志偉 尹昭恒
摘要:自單片機問世以來,已廣泛應(yīng)用于各個行業(yè)。當今社會,幾乎所有的電子產(chǎn)品都會使用單片機的集成芯片。51單片機是一款八位單片機,其易用性和通用性受到了廣泛用戶的好評。基于其體積小、功耗低、成本低,工作可靠性強。根據(jù)這些特點,特別適合控制相關(guān)系統(tǒng)。本設(shè)計采用STC89C52RC微控制器作為車身的主要核心控制芯片。操作說明的無線傳輸。光電門用于監(jiān)控小車驅(qū)動輪的轉(zhuǎn)速。從而用PWM動態(tài)調(diào)節(jié)和控制小車的速度和方向。本設(shè)計主要實現(xiàn)了以下功能:前進后退、左轉(zhuǎn)右轉(zhuǎn)、黑線追蹤、避障、紅外遙控、車速調(diào)節(jié)。
關(guān)鍵字:51單片機;智能小車 ;可管理;STC89C52RC
一、引言
51單片機是對所有兼容Intel8031指令系統(tǒng)的單片機的統(tǒng)稱。該系列單片機的始祖是Intel的8004單片機,后來隨著Flash rom技術(shù)的發(fā)展,8004 單片機取得了長足的進展,成為應(yīng)用最廣泛的8位單片機之一,其代表型號是ATMEL公司的AT89系列,它廣泛應(yīng)用于工業(yè)測控系統(tǒng)之中。很多公司都有51系列的兼容機型推出,今后很長的一段時間內(nèi)將占有大量市場。51單片機是基礎(chǔ)入門的一個單片機,還是應(yīng)用最廣泛的一種。需要注意的是51系列的單片機一般不具備自編程能力。
智能遙控小車的研究現(xiàn)狀最早應(yīng)用于美國工業(yè),是因為它具有極大的便捷性和智能性。讓它被政府認可。在相關(guān)技術(shù)和政策的支持下,各主要工業(yè)國在智能無線遙控方面都有一定的優(yōu)勢。因此,未來智能汽車的應(yīng)用將無處不在。在這種設(shè)計中,智能汽車由兩個輪子驅(qū)動。C52RC芯片是控制的核心部分,而DC電機主要是L298N集成電路。借助單片機產(chǎn)生的脈寬調(diào)制信號,控制電機轉(zhuǎn)速,進而調(diào)節(jié)轉(zhuǎn)速。實現(xiàn)了紅外避障。在此基礎(chǔ)上,連接紅外控制。單片機解碼后,自動選擇汽車功能。這種設(shè)計結(jié)構(gòu)被簡化了。相對容易實現(xiàn)。但它高度智能化和人性化。某種程度上體現(xiàn)了智能屬性。
二、系統(tǒng)總體結(jié)構(gòu)及原理
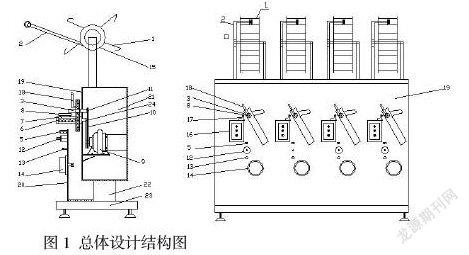
本設(shè)計是一款基于單片機的智能小車。整個小車系統(tǒng)主要由硬件系統(tǒng)和軟件系統(tǒng)兩部分組成。無線遙控小車的整體結(jié)構(gòu)圖如圖1所示。本設(shè)計系統(tǒng)主要集中在以STC89C52RC為核心的單片機上。利用T0定時器的中斷方式,形成更精確的脈沖波,驅(qū)動發(fā)動機L298N芯片,精確控制發(fā)動機轉(zhuǎn)速。PT2262的編解碼芯片用于無線傳輸和操作:車身移動平臺上的單片機接收到相應(yīng)的命令后,控制命令改變發(fā)動機的PWM脈沖波形。并調(diào)整車輛的當前運行狀態(tài)。
三、硬件設(shè)計
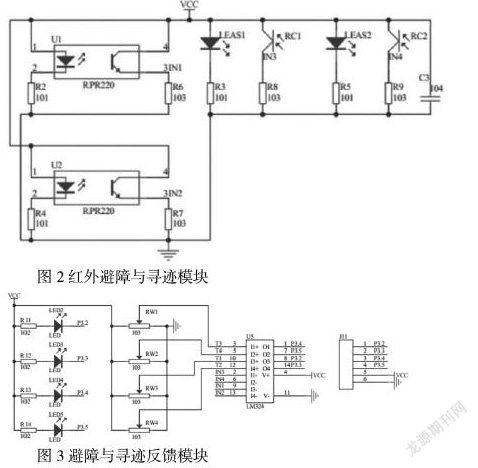
在小車設(shè)計的硬件模塊中單片機采用的是51系列作為控制的核心處理器。這里主要是以STC89C52RC作為主要控制芯片,它兼容51的全部功能并且功能更加優(yōu)化。單片機最小系統(tǒng)由外圍信號I/0口組成的,包括電源、CPU時序電路、復(fù)位電路。在這三個模塊的基礎(chǔ).上,單片機就能夠正常的工作。設(shè)計系統(tǒng)中,時鐘晶振電路模塊采用的工作方式是內(nèi)部時鐘的工作方式,是通過利用芯片內(nèi)部的實時震蕩諧振電路模塊來進行實現(xiàn)。本設(shè)計的主要核心硬件模塊是紅外避障和尋跡功能模塊。紅外避障模塊與紅外尋跡模塊分別如圖2、3所示。將第一個RPR0/IN1與M34中的第九個引腳相連接起來,紅外發(fā)光二極管分別接P3.2. P3.3.P3.4和P3.5引腳,通過比較LM34芯片,我們知道可以通過接受管電壓與設(shè)置的參考電壓值進行比較,之后得到顯影電平的輸出。小車跳轉(zhuǎn)到尋跡模式后。對應(yīng)的單片機就開始進行工作。進行不停的對I/O口進行掃描。直到檢測到某一個I/O有信號輸出時,首先要做出判斷是哪一個探測器對黑線進行的探測以及得到的結(jié)果,若是左邊的探測器探測到.的信號。對應(yīng)的也就是左邊的車身把白線壓到了。那么此時就要對.小車做出右轉(zhuǎn)的命令使其右轉(zhuǎn):同樣的道理。如果是右邊的探測器探測到的信號,也就意味著小車右邊壓上了黑線。此時小車就應(yīng)該向左偏離運行軌跡,做出靠左的反應(yīng)。經(jīng)過這樣的調(diào)整過后。小車.是還要進行前行的動作。小車不斷循環(huán)往復(fù)地重復(fù)以上動作。從而達到在方向上對小車進行控制。
四、總結(jié)
本設(shè)計以單片機為控制核心,結(jié)合尋跡電路、無線遙控電路、電機驅(qū)動電路和紅外避障電路實現(xiàn)小車的行駛,自動循跡,避障,紅外遙控,車速調(diào)節(jié)等功能。基本完成各項指標,實現(xiàn)小車的智能化行駛。系統(tǒng)是通過軟硬結(jié)合的方式,得到硬件檢測信號后輸入單片機各個對應(yīng)的I/0接口,通過匯編程序控制過程,小車由遙控啟動后,自動尋跡,并不斷檢測遙控、避障和語音信號,只要得到其中任何種信號都將轉(zhuǎn)入它們對應(yīng)的功能模塊,實現(xiàn)有效控制。此次設(shè)計的知識面比較廣范,能把我們所學(xué)的知識都聯(lián)系起來,也是一次理論聯(lián)系實際的訓(xùn)練,能夠使我們的知識掌握更牢,并能提升我們分析問題,解決問題的能力。
參考文獻:
[1]劉雪飛.李萬敏.基于51單片機的智能小車控制系統(tǒng)設(shè)計與制作[J].2020
[2]張鑫.單片機原理及應(yīng)用(第4版)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
