調車機車無線機車信號和監控系統控制模式探討
2021-04-22 10:44:08陸國明中國鐵路上海局集團有限公司電務部
上海鐵道增刊 2021年1期
關鍵詞:作業
陸國明 中國鐵路上海局集團有限公司電務部
STP 系統是保障鐵路站內調車作業安全的重要設備。STP 與LKJ 系統結合,為調車機車在調車場內的作業提供安全保障,STP 系統獲取調車站場的進路信息,行車許可信息,并把調車機車前方信號機的狀態、距離等信息提供給LKJ,由LKJ系統根據防護點狀態、防護距離等信息產生控制曲線,并根據機車的實際運行速度對機車進行防護,產生卸載、常用、緊急等動作。
STP 系統與LKJ 系統結合,能夠有效的防止調車機車在作業時冒進信號、沖撞土擋、擠道岔、超速行駛和超速連掛等事故,其控制模式可分為空線走行模式、藍燈防護模式、道岔限速模式、區段限速模式、存車線限速模式、盡頭線控制模式、出站跟蹤調車模式、一度停車點模式、特殊車輛作業模式、無進路動車模式,本文我們對STP 特定的幾個控制模式在具體應用中遇到的問題進行探討。
1 藍燈防護模式
1.1 藍燈防護基本控制模式

圖1 藍燈防護情況下的控制模式曲線
藍燈防護模式是調車控制中最基本的防護模式,是STP應用最廣泛的控制模式,防護機車冒出信號機、防止擠岔等事故。機車前方為關閉信號,防護車列在關閉信號的安全距離外停車,相當于LKJ 正線運行時的紅燈停車模式。調車司機確認地面信號后,可以對該模式進行解鎖,解鎖后,系統允許機車按照線路限速運行。其控制模式曲線如圖1所示。
1.2 藍燈防護模式的信號突變討論
在實際應用中,因為存在軌道區段分路不良以及調車監控自身的走行誤差等情況,容易出現車列輪對實際已經越過信號機,但聯鎖系統前方的區段未占用,導致前方白燈信號突然被關閉,限速突降,引起機車直接緊急制動。限速曲線如圖2所示。
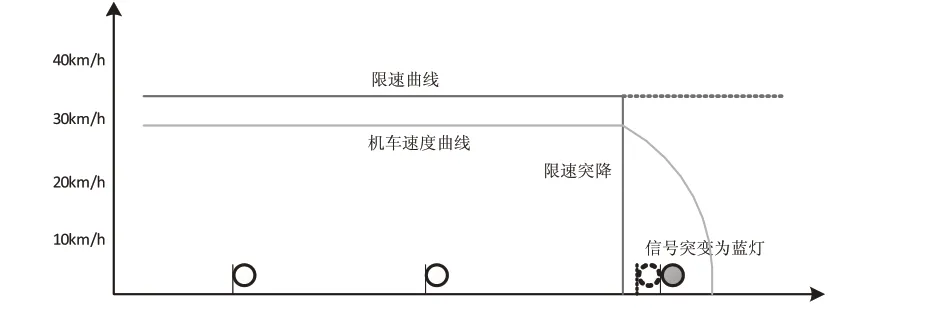
圖2 限速曲線
此種情況引起的限速突降,導致機車直接緊急制動,因距信號機近,實際上車列會冒出信號機,進入到下一進路的控制模式。這種現象在專用調車場出現的頻次比較比較高,突然的緊急制動容易造成車輛車鉤損傷,引起人身安全事故。針對上述情況,應在藍燈防護的基礎上增加信號突變模式,信號突變時,增加司機人工確認機制,采用報警加限速延后變化方式進行控制。
在前方信號由允許信號變為禁止信號時,系統應按照機車的實際運行速度判斷是否能在信號機前制動停下,如果能防止車列越過信號機,則應該立即啟動藍燈防護模式,讓限速曲線下降,機車緊急制動公式為:
S=SK+Se+Sɑ=v0tk/3.6+4.17(v0 2-vm2)/(1000φhδhβc+ω0+ij)+Sɑ
式中:SK為制動空走距離,m;Se為有效制動距離,m;Sɑ為附加距離,m;v0為初始速度,m/s;tk為空走時間,s;vm為末速度,緊急制動時為0,m/s;φh為閘瓦換算摩擦系數;δh為列車換算摩擦系數;βc為常用制動系數;ω0為基本阻力,N/kN;ij為坡道千分度,‰;
以調機牽引50 輛貨車,運行速度40 km/h 時實時緊急制動為例,計算緊急制動距離為118 m,即機車信號突變,距信號機118 m才能保證在車列不冒出信號機。
在STP 藍燈控制模式下,如判斷前方信號由白燈變為藍燈,當距離信號機較遠,能確保停止信號機前方時,應立即啟動限速模式,讓車列停車。當離信號機比較近時,有可能越過該防護信號機,則應該啟用報警模式,由司機確認信號,司機7 s未確認信號,再啟用緊急制動方案。控制模式如圖3。

圖3 在STP藍燈情況下的控制模式
1.3 藍燈防護模式的解鎖控制討論
調車作業中,因存在壓岔折返以及原進路折返等多種非正常進路調車的作業方式,在作業過程中,需要經常用到藍燈防護模式的解鎖功能,當前調車監控的藍燈解鎖模式,司機解鎖完成,調車限速直接上抬至進路限速,交給司機控制,當機車越過當前信號機時,按照下個基本進路進行控制。
藍燈防護模式在實際運用過程中,存在以下兩個跟安全相關問題,一是解鎖后限速上抬至進路限速,容易給司機直觀的印象,后續不會控制,形成依賴性,實際作業過程中頻繁的使用解鎖功能;解鎖后,當機車越過當前藍燈后,按照下一進路控制,如果下一進路仍然為關閉信號,且距離很短,會導致限速突降,引起緊急制動,其控制模式曲線如圖4。
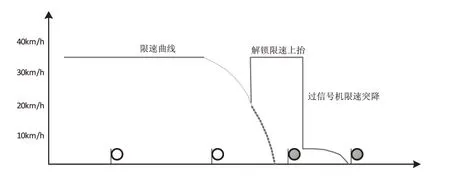
圖4 藍燈防護模式情況下的控制模式曲線
藍燈解鎖后的控制模式,可以參考LKJ 正線運行模式下的走停走模式進行控制,司機解鎖后,目標限速上抬至15km/h(可設置),當機車越過藍燈信號機后,允許以15km/h走行20m,之后恢復限速的正常控制。采用該模式后,可以預防司機的習慣性解鎖,減少司機不按規定解鎖后引發的擠岔等事故。越過藍燈后維持20m 的限速控制,防止在前方繼續藍燈情況下的限速突降引起的緊急制動。其模式曲線如圖5。

圖5 藍燈解鎖后模式曲線
2 存車線限速模式
車列進入有車股道或者有車區段內解掛車時的,當車列接近存車區段的防護信號機,控制連掛限速至存車線允許最高限速,在有確切的存在距離時,連掛安全距離內,限制機車的速度不得超過連掛的最高限速,防止超速連掛。在存在車距離未知時,STP 只控制存車線最高限速,不控制連掛限速,存車線允許最高限速及連掛最高限速可以由LKJ限速模式設置。其控制模式曲線如圖6所示。

圖6 車列進入有車股道或者有車區段內解掛車時的控制模式曲線
2.1 存車線模式最高限速控制討論
存車線模式的最高限速起控點在進路的始端信號機處,并非存車區段的始端,在實際的調車作業中,一般存車股道都會有接近岔區,按照站場的設計,有的岔區長度比較長,從進路始端到存車區段可能有100多米的距離。按照鐵路技規或者站系規定,存車線最高限速一般指機車進入存車股道的最高限速。目前存車線最高限速的控制比規定要求的要早,在相對繁忙的站場,會影響調車效率。如圖7 的實際存車線控制模式存車線最高限速的起控點,應按照鐵路技規和站系規定從存車股道的起始點開始控制,在股道的岔區比較長的情況,能提高調車作業效率,如圖7 的優化后存車線限速模式。其控制模式如圖7。

圖7 存車線控制模式
2.2 存車線模式未知存車線控制討論
目前版本的STP 控制模式,未知存車線只控制存車線的最高限速,進入存車線內,完全交給司機或者平面調車控制,存在比較大的安全隱患,如圖8 的實線控制曲線。未知存車線的設計中,應加入語音及人工確認環接,把超速連掛的風險降到最低。
在進入存車線時,應有明顯的限速下降過程,并語音提示“前方存車線”,司機確認后再恢復到存車線的最高限速控制,這樣能顯著的提醒司機注意前方為存車線,且能防止股道內車列停在近端的超速連掛問題。其控制模式如圖8的虛線所示。
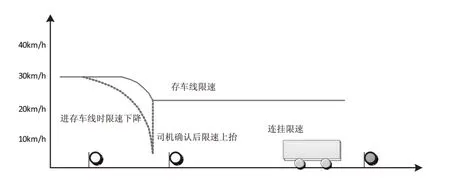
圖8 進入存車線時的控制模式
3 盡頭線限速模式
車列前方為線路盡頭,一般指機待線或者牽出線,當車列頭部接近盡頭線的防護信號機時,限速降為盡頭線允許最高限制速度。當車列前方靠近盡頭標時,控制機車在盡頭標的安全距離外停車。盡頭線允許最高限速可以由LKJ 限速模式設置。其控制模式曲線如圖9所示。
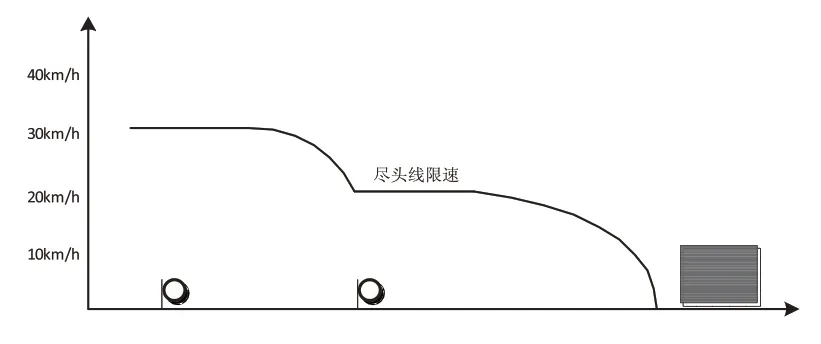
圖9 車列前方為線路盡頭時的控制模式曲線
盡頭線的起控點為進入盡頭線的最后一架防護信號機,在實際的使用中,存在最后一架信號機到實際的土檔有比較長的岔區,甚至可能達到500 m 以上,按照上述模式,會對調車運輸效率有比較大的影響。盡頭線最高限速的起控點,應按照鐵路技規和站系規定從盡頭區段的起始點開始控制,該模式曲線和存車線最高限速的起控點一樣,在此不做累述。
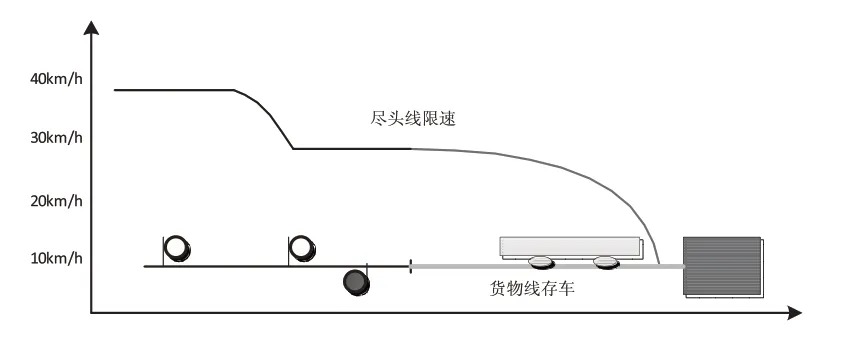
圖10 專用調車場內的控制模式
專用調車場內,貨物線的作業模式主要為推送作業,用于存儲車輛。一般的貨物線內電氣化軌道區段只有一截保護區段,不超過25 m。從聯鎖系統上觀察,貨物線內有車停留,但軌道電路沒有占用信息,不能區分該貨物線內是否存有車輛,STP系統按照普通盡頭線模式控制,存在比較大的安全隱患,如圖10所示。
對于貨物線內的存車和盡頭線混合控制,系統的控制難點在于沒有軌道區段的占用信息作為控車依據,不能得知貨物線內是否有存車,且不能像股道存車一樣能計算出精確的存車位置。STP在遇到此種情況時,首先應保證安全連掛,采用未知存車和盡頭線控制兩種曲線并行的方式控制,哪個限速低按照哪個控制。進入貨物線內后,走行時采用聲光報警,且距前方距離顯示未知等方式提醒司機注意前方存車。控制模式如圖11。

圖11 貨物線內的存車和盡頭線混合情況下的控制模式
4 結束語
STP 系統經過多年的應用,已經能防止調車作業中絕大部分的闖藍燈、擠岔、超速連掛、沖撞土檔等調車事故的發生。調車作業有其特有的復雜性,站場的情況比較復雜,分路不良、信號突變、連續溜放、再次連掛等作業方式都會影響系統的正常防護作業。且調車作業也需考慮運輸效率,在保證安全的前提下,不能影響車站的正常生產。介于以上因素,STP的控制模式在應用過程中可適當的做出改變,以便能更好的服務于調車安全作業。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08