基于偏心槳機構的水陸兩棲機器人陸上步態實驗研究
2021-04-23 04:53:16楊洪濤
三門峽職業技術學院學報 2021年1期
關鍵詞:實驗
◎楊洪濤
(商丘職業技術學院經貿系,河南商丘476000)
傳統的陸上或水下機器人通常只能在單一環境下工作,很難應用于重大災害侵襲后的惡劣的兩棲環境中。與此不同,基于偏心槳機構的兩棲機器人能夠根據槳軸的主動控制實現豐富的運動形式,適應水下、沙地、泥濘和巖石陸地等各種復雜的環境,可以應用于災害救援、行星探測、地質調查等方面[1-9]。
仿生水陸兩棲機器人靈感來自自然水陸兩棲生物的形態以及運動特征,包括蛇類機器人、蠑螈機器人、魚類水陸兩棲機器人、龍蝦機器人等。蛇形機器人是一種類似蛇的仿生機器人,具有不同的構型和尺寸。雖然蛇形機器人在大小和設計上有很大差異,但他們可進入并在狹窄的空間里工作。魚類機器人具有活魚的形狀和運動。目前,研究人員已經開發出約40種不同類型的魚類機器人,其中大多數魚類機器人都可模仿使用身體尾鰭(BCF)推進的活魚。蠑螈機器人能夠通過使用蠑螈髓質神經網絡的數字模型來移動。
可通過遠程站傳輸簡單命令實現速度調控。龍蝦機器人由一種特制的防水電池提供動力,它頭部的兩根長須是一種靈敏度極高的防水天線,腳上都裝配有防水毛傳感器,它的大腦則是一臺超微型計算機,能夠像真龍蝦一樣適應不規則的海底,在不同的深度敏捷地行動,并且可以靈巧地應對洶涌的波濤和變化的海流,躲避各式各樣的海底礁石。這些機器人模仿其對應生物的生物學特性和功能。然而,仿生學兩棲機器人受工作環境限制較大。比如,蛇機器人、魚類機器人、蠑螈機器人[10]都能夠在水中和陸上移動,但它們可能會卡在濕地或崎嶇的地形上。龍蝦機器人可以在陸地或海底行走,但它不能在水中游泳。
雖然在水陸兩棲機器人設計方面已經取得了許多成就,但兩棲機器人依然難以用于實際任務,例如在發生海嘯或洪水之后的搜索和救援任務。在這種情況下,期望水陸兩棲機器人能夠在不平坦的地面上行進、在水中游泳、通過沙灘和泥濘的水池。由于移動性能,運動效率和負載能力的限制,大多數現有的水陸兩用機器人難以應用在這些實際的高風險任務中。基于偏心槳機構的兩棲機器人能夠根據槳軸的主動控制實現豐富的運動形式,適應水下、沙地、泥濘和巖石陸地等各種復雜的環境,可以應用于災害救援、行星探測、地質調查等方面。筆者以偏心槳機構為研究對象,搭建了基于LabVIEW系統的實驗臺,對該機構的陸上步態運動性能進行了測試。
1偏心槳機構運動原理
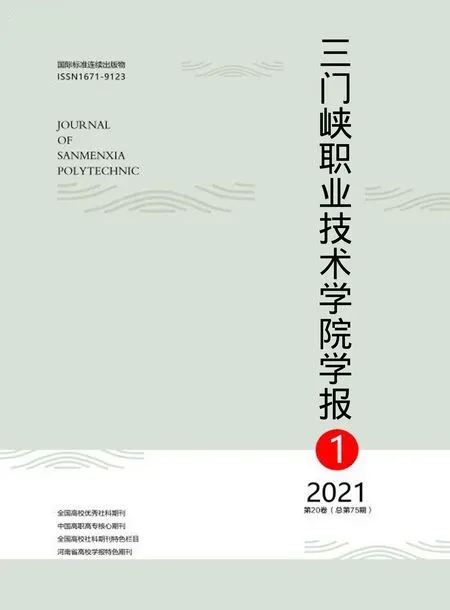
偏心槳機構最先由Sun等人提出[1],包含一個輪式殼體和一組槳葉,如圖1所示。輪殼由一個馬達驅動實現旋轉運動,固定在輪緣的鉸鏈可以被動旋轉,槳葉通過鉸鏈實現伸縮。槳葉軸由一對馬達通過行星齒輪機構驅動,在輪殼內實現平面運動。當輪向前滾動時,通過調整槳葉軸的位置控制槳葉主動地伸出或縮回,實現前向運動。
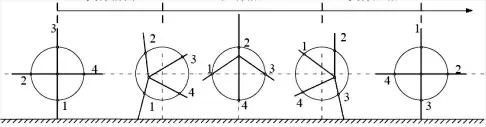
圖1 陸上步態相序
2偏心槳機構陸上步態測試實驗臺搭建
本實驗的步態設計與控制采取LabVIEW控制程序,如圖2所示。控制面板如圖3所示,在進行實驗時,這也是整個實驗的控制面板,控制電機的運作時間與運動方向。為了驗證水陸兩棲機器人陸上步態效果,搭建了如圖4所示的實驗臺。該實驗平臺長為1900mm、寬為600mm、高為1200mm。通過型材將兩個偏心槳模塊固定在實驗臺的移動平臺上,該移動平臺在豎直方向和水平方向采用直線軸承導向。通過主動調節槳軸位置,機器人可保證平衡并帶動平臺向前移動。

圖2 運動步態控制程序結構

圖3 實驗臺控制面板
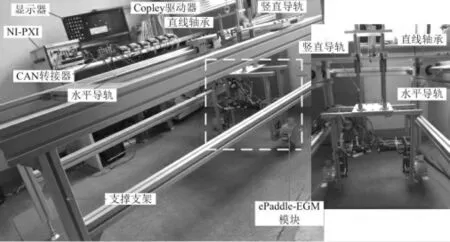
圖4 陸上步態測試實驗臺
圖5 實驗臺控制系統框架
實驗臺控制系統框架如圖5所示。包含NI-PXI-1042Q機箱、CANopen PXI接口、Copley驅動器等核心設備。NI-PXI-1042Q機箱為8插槽,安靜的通用交流PXI機箱。PXI-1042Q滿足當今PXI應用的苛刻的冷卻和電源要求。PXI-1042Q兼容3U PXI和CompactPCI模塊。它還具有擴展的溫度范圍和可移動的高性能交流電源。NI-PXI-8531是一款單端口高速CANopen PXI接口,用于通過NI LabVIEW開發Windows或LabVIEW實時系統上運行的CANopen應用程序。CANopen是基于控制器區域網(CAN)物理層的高層通信協議。該產品為運動機器控制網絡(例如處理系統)設計,也廣泛用于其他應用,包括醫療設備、越野車輛、海事電子、公共交通和建筑自動化。Copley驅動器采用Accelnet Micro Panel(ACJ-055-09)的20-180V無刷電機直流數字驅動器。Accelnet Micro Panel是緊湊型直流電動伺服驅動器,用于交流無刷和直流電刷電機位置,速度和轉矩的控制。它可以在分布式控制網絡,獨立分度驅動器或外部運動控制器上運行。標準反饋是數字四通道A/B編碼器,兩種選項可用于支持無刷分解器(-R)或模擬sin/cos編碼器(-S)。索引模式使PLC能夠簡化操作,使用輸出選擇和啟動索引和輸入以讀取驅動器狀態。此外,PLC可以發送可更改運動配置文件的ASCII數據,以便隨著機器人需求的變化,一個索引可以執行各種運動,并支持CANopen分布式控制架構。作為CANopen協議下的CAN節點,它支持輪廓位置,輪廓速度,輪廓扭矩,插補位置和歸位。單個CAN總線最多可以運行127個驅動器,并且可以通過CAN連接一組驅動器,以便它們一起執行運動配置文件。在轉矩(電流),速度和位置模式下,可以使用外部運動控制器進行操作。輸入指令信號可以為±10V(轉矩,速度,位置),PWM/Polarity(轉矩,速度)或步進格式(CU/CD或步進/方向)。
3實驗驗證及分析
3.1障礙物設定
選取5mm×5mm×100mm的木塊作為障礙物的基本單元,設置了三組不同的障礙物來研究兩棲機器人機構的越障能力。
障礙物一:這種障礙物是最簡單的障礙物設置,僅由一個基本單元組成。使用了一個5mm×5mm×100mm的木塊。設置這種障礙物,是為了研究兩棲機器人裝置在翻越普通大小、形狀單一的障礙物時,其運動狀態以及越障情況。將障礙物直接放置在地板的防滑墊之上,然后將其固定,防止單個障礙物在與兩棲機器人裝置的槳葉接觸時導致障礙物滑動。
障礙物二:障礙物二的設置是在由基本單元組成的障礙物一的基礎上升級完成的。利用六個5mm×5mm×100mm的木塊拼接而成。由于設備設施的限制,先用透明膠將三個木塊組合成一個小的障礙物,然后用三個木塊再次拼接成一個相同樣式的障礙物,之后將兩個組合完成的障礙物堆放在一起,使之緊密結合。
障礙物三:在障礙物二的基礎上,再加六個5mm×5mm×100mm的木塊,組合成本次實驗中的主要障礙物,即障礙物三。由十二個5mm×5mm×100mm木塊組合而成的障礙物三詳見下圖6所示。關于障礙物三的制作,在障礙物二的基礎上,我們利用六個5mm×5mm×100mm木塊組合成二個5mm×15mm×100mm的條形塊,然后把他們與障礙物二緊密堆放在一起。
3.2實驗設備的設定

圖6 實驗用障礙物
首先啟動NI-PXI-1042Q主機。該主機自帶Windows系統,因此,不需要其他主機。然后打開顯示器。打開調試好的PVT步態控制程序,在程序內設置完成偏心槳機構的運動方向與運動時間。之后,返回至控制主界面(如圖7所示)。
本實驗測試槳葉軸在不同位置的情況下,偏心槳機構的運動性能和越障能力。下圖9分別是槳葉軸距離軸心位置0.5倍半徑處右下45°、距離軸心位置0.5倍半徑處右邊90°、距離軸心位置0.5倍處左邊-90°的三個位置的示意圖。

圖7 實驗控制臺
3.3實驗內容的設定

圖8 實驗狀態
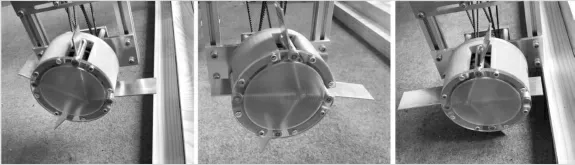
圖9 槳葉軸處于不同位置時的實物
為簡化表格,用“S”代表槳葉軸的位置;“d”表示槳葉軸與障礙物的距離,單位為mm;障礙物類型用“T”表示,其中“T1”表示障礙物一,“T2”表示障礙物二,“T3”表示障礙物三;總實驗次數用“N”表示;越障成功次數用“P”表示;越障失敗次數用“F”表示。
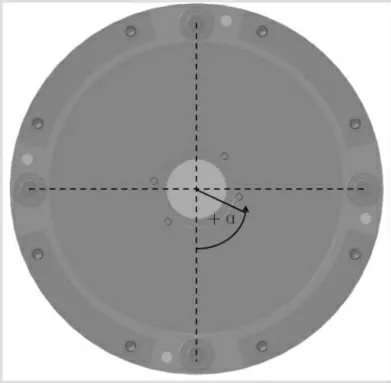
圖10 關于“S”記法中α的說明
其中,位置“S”的表述說明如下:如下圖10所示,以偏心槳機構的中心為中心,豎直線的下半部為角度的起始位置,逆時針旋轉過的度數為正(+α)。在做實驗時,槳葉軸的位置是變化的,為了簡便,將槳葉軸的位置記為“L-α”。例如“0.5R-45°”(R代表半徑)表示:槳葉軸中心距離端蓋中心的距離為0.5R,槳葉軸中心與端蓋中心的連線與豎直線的下半部成45°夾角;“0-0”表示:槳葉軸中心與端蓋中心重合,此時槳葉軸處于正中心。
實驗內容分類如表1所示。每組實驗重復10次,記錄成功與失敗次數。圖11為其中一組實驗成功的示例。
3.4實驗結果

表1 實驗分類
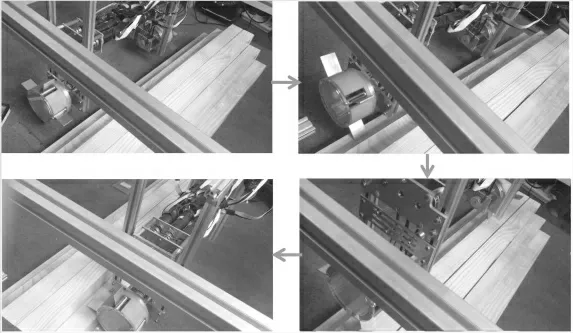
圖11 實驗成功示例

表2 實驗結果總覽
在270余組實驗中,統計并且分類記錄了所有實驗結果,列于表2。越障成功次數用“P”表示;越障失敗次數用“F”表示。
3.5實驗分析與討論
通過實驗記錄的數據,計算出在270組實驗數據中,平均成功率為66.67%。同時發現不考慮槳葉軸位置對越障能力以及偏心槳機構運動性能的影響時,在T1障礙物情況下,平均成功率為83.33%;在T2障礙物情況下,平均成功率為70.00%;然而在T3障礙物情況下,平均成功率僅為46.67%。當考慮槳葉軸位置對越障能力以及偏心槳機構運動性能的影響時,發現在“S”相同的情況下,障礙物由“T1”到“T3”的過程中,越障實驗的成功率呈現遞減的趨勢。因此可以得出結論:障礙物越簡單,偏心槳機構越容易成功翻越。
結語
傳統的陸上或水下機器人通常只能在單一環境下工作,很難應用于重大災害侵襲后的惡劣的兩棲環境中。與此不同,基于偏心槳機構的兩棲機器人能夠根據槳軸的主動控制實現豐富的運動形式,適應水下、沙地、泥濘和巖石陸地等各種復雜的環境,可以應用于災害救援、行星探測、地質調查等方面。通過本實驗研究,搭建了基于偏心槳機構的陸上步態測試實驗臺,并完成了多組不同情況下的陸上步態實驗,分析了基于偏心槳機構的兩棲機器人陸上步態實驗的結果。實驗結果表明,偏心槳葉輪較傳統的光輪具有良好的越障能力,且槳葉軸位置對越障能力以及偏心槳機構運動性能具有顯著影響。未來,將研究規劃槳葉軸的軌跡規劃方法,以提高偏心槳葉輪式機器人在復雜環境下的通過性。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55