基于多尺寸特征疊加的SAR 艦船目標(biāo)檢測(cè)方法
2021-04-25 08:12:06魏松杰張澤棟徐臻劉梅林陳偉
魏松杰,張澤棟?,徐臻,劉梅林,陳偉
(1.南京理工大學(xué)計(jì)算機(jī)科學(xué)與工程學(xué)院,江蘇南京 210094;2.上海交通大學(xué)航天學(xué)院,上海 200240;3.上海衛(wèi)星工程研究所,上海 200240)
艦船目標(biāo)檢測(cè)在海洋監(jiān)測(cè)和國(guó)土安全領(lǐng)域的作用愈發(fā)重要,包括海事安全、海上交通、海洋污染防治和邊境管制方面具有較為廣泛的應(yīng)用[1].合成孔徑雷達(dá)(Synthetic Aperture Radar,SAR)通過保證相參性的脈沖發(fā)射信號(hào),具有較高的分辨率,可以全天時(shí)、全天候工作,自問世以來,就在民用遙感、測(cè)繪和軍事目標(biāo)探測(cè)領(lǐng)域展現(xiàn)出優(yōu)秀的能力[2],隨著海洋船舶技術(shù)的發(fā)展,Sentinel-1、ERS 系列和高分系列等衛(wèi)星相繼出現(xiàn),基于SAR 圖像的艦船目標(biāo)檢測(cè)應(yīng)用場(chǎng)景和應(yīng)用效果不斷擴(kuò)展提高.
恒虛警處理(CFAR)可以對(duì)潛在的艦船區(qū)域進(jìn)行提取,通過既定的檢測(cè)方法確定閾值,輸入信號(hào)中根據(jù)閾值確定像素是否為目標(biāo)像素,為保持虛警的概率,閾值會(huì)根據(jù)輸入中的噪聲以適當(dāng)?shù)囊?guī)則保持恒定,并降低噪聲、雜波等干擾對(duì)虛警率的影響.針對(duì)目標(biāo)運(yùn)動(dòng)時(shí)的距離分量導(dǎo)致方位偏移問題,文獻(xiàn)[3]通過線性積分和長(zhǎng)度歸一化技術(shù),將線性特征轉(zhuǎn)化為點(diǎn)特征來構(gòu)建概率模型實(shí)現(xiàn)CFAR 檢測(cè).文獻(xiàn)[4]提出了一種基于非對(duì)稱映射和選擇性濾波方法的自適應(yīng)閾值單元平均恒虛警率船舶檢測(cè)算法,實(shí)驗(yàn)證明使用所提出的過濾步驟可以降低虛警率,且不降低檢測(cè)率.
計(jì)算機(jī)視覺領(lǐng)域的優(yōu)秀目標(biāo)檢測(cè)與框架不斷推陳出新,基于深度學(xué)習(xí)的目標(biāo)檢測(cè)技術(shù)已經(jīng)逐漸代替?zhèn)鹘y(tǒng)的方法,成為目標(biāo)檢測(cè)領(lǐng)域的主流技術(shù),而卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Networks,CNN)[5]憑借其良好的特征自提取能力,共享卷積參數(shù)等天然優(yōu)勢(shì),已經(jīng)廣泛地應(yīng)用在目標(biāo)檢測(cè)領(lǐng)域.基于卷積神經(jīng)網(wǎng)絡(luò)的檢測(cè)方法主要分為基于候選區(qū)域的雙階段目標(biāo)檢測(cè)方法與單次目標(biāo)檢測(cè)方法.其中以R-CNN[6]、Fast R-CNN[7]、Faster R-CNN[8]、R-FCN[9]和Mask RCNN[10]為代表的基于候選區(qū)域的雙階段目標(biāo)檢測(cè)方法通過特征圖提取候選區(qū)域,判斷錨點(diǎn)屬于前景或背景,利用邊框回歸與分類器修正得到檢測(cè)目標(biāo)分類信息和位置坐標(biāo).而YOLO[11]就是基于回歸策略的單階段檢測(cè)方法,直接使用一個(gè)卷積神經(jīng)網(wǎng)絡(luò)同時(shí)預(yù)測(cè)邊界框的位置和類別.SSD[12]以YOLO 基于回歸的思想為基礎(chǔ),使用小卷積濾波器預(yù)測(cè)目標(biāo)類別和偏移,并通過將其應(yīng)用于多個(gè)特征映射可以達(dá)到多尺度檢測(cè).之后在YOLO 和SSD 的基礎(chǔ)上又衍生出了YOLOv2[13]、YOLOv3[14]、RetinaNet[15]、RefineDet[16]、M2Det[17]等算法,在檢測(cè)精度和效率上更加優(yōu)秀.
以上述多個(gè)目標(biāo)檢測(cè)算法為基礎(chǔ),文獻(xiàn)[18]以RetinaNet 為基礎(chǔ)結(jié)構(gòu),對(duì)特征金字塔網(wǎng)絡(luò)進(jìn)行改進(jìn),提升特征的提取效果,使用遷移學(xué)習(xí)等方法,相比原算法有更高的準(zhǔn)確率.文獻(xiàn)[19]針對(duì)小目標(biāo)密集難以檢測(cè)問題,針對(duì)艦船目標(biāo)設(shè)計(jì)不同尺度的轉(zhuǎn)換功能,連接到多個(gè)特征地圖以獲取多比例尺特征,加入上下文特征以輔助復(fù)雜目標(biāo)的檢測(cè),達(dá)到了較好的檢測(cè)性能.文獻(xiàn)[20]設(shè)計(jì)包括兩層結(jié)構(gòu)的級(jí)聯(lián)卷積框架,首先對(duì)目標(biāo)初步的快速篩選,然后借鑒遷移學(xué)習(xí)方法初始化特征提取網(wǎng)絡(luò),結(jié)合矩形旋轉(zhuǎn)框等技術(shù)可以保證達(dá)到較好的檢測(cè)精度的條件下優(yōu)化了檢測(cè)效率.文獻(xiàn)[21]提出一種多輸入分辨率CNN 模型,模型中不同輸入分辨率的組合提高了提取特征的能力,在多類別通用數(shù)據(jù)集上交叉評(píng)估,分類精度得以提高.文獻(xiàn)[22]在Faster-RCNN 網(wǎng)絡(luò)的基礎(chǔ)上針對(duì)SAR 圖像艦船目標(biāo)調(diào)整錨框大小以及損失函數(shù),檢測(cè)精度和效率有相應(yīng)的提高,并制作了艦船檢測(cè)領(lǐng)域的數(shù)據(jù)集,包含上千圖片和不同形態(tài)、特點(diǎn)的目標(biāo),為艦船目標(biāo)檢測(cè)領(lǐng)域提供了良好的檢測(cè)樣本.文獻(xiàn)[23]提出一種基于多尺度特征融合的卷積神經(jīng)網(wǎng)絡(luò)來生成更加豐富的語(yǔ)義信息,在SAR 圖像艦船目標(biāo)識(shí)別體現(xiàn)出較好的效果.本文同樣以多尺度特征融合為主要思想,在特征融合過程中應(yīng)用更深層次的特征圖,增加一次融合操作,此外特別針對(duì)艦船目標(biāo)獨(dú)有特征設(shè)計(jì)篩選過程,完成SAR 圖像艦船目標(biāo)的識(shí)別,同時(shí)完成艦船目標(biāo)的分類功能.
針對(duì)SAR 艦船目標(biāo)中不同尺度目標(biāo)對(duì)檢測(cè)結(jié)果的影響,本文借鑒YOLOv3 檢測(cè)算法中可變尺度特征圖和回歸策略,設(shè)計(jì)了多層次特征檢測(cè)的卷積神經(jīng)網(wǎng)絡(luò),通過改進(jìn)YOLOv3 模型增強(qiáng)網(wǎng)絡(luò)對(duì)不同尺度艦船目標(biāo)的適應(yīng)能力,對(duì)多種尺度的檢測(cè)目標(biāo)使用相適應(yīng)特征圖進(jìn)行提取,對(duì)檢測(cè)損失函數(shù)進(jìn)行相應(yīng)的改進(jìn),模型通過共享參數(shù)和剪枝壓縮進(jìn)行輕量化處理,同時(shí)建立了包含四種類別的艦船檢測(cè)數(shù)據(jù)集,使用預(yù)訓(xùn)練權(quán)重等方法,進(jìn)行了多組對(duì)比分析實(shí)驗(yàn)進(jìn)行驗(yàn)證.
1 模型方法
模型的整體流程如圖1 所示,圖中數(shù)字對(duì)應(yīng)文中相應(yīng)章節(jié).首先對(duì)原始的SAR 圖像進(jìn)行圖像的預(yù)處理操作,然后將圖像裁剪成適合神經(jīng)網(wǎng)絡(luò)接受的大小,通過特征疊加網(wǎng)絡(luò)得到不同尺寸的特征圖,對(duì)每種特征圖的預(yù)測(cè)結(jié)果進(jìn)行篩選,區(qū)分正負(fù)樣本,然后通過計(jì)算損失函數(shù)的大小來確定最終檢測(cè)結(jié)果.

圖1 總體檢測(cè)流程Fig.1 Detection procedure overview
1.1 模型設(shè)計(jì)流程
1.1.1 殘差網(wǎng)絡(luò)模塊
基于前饋神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu),隨著隱藏層數(shù)的增加,對(duì)輸入特征抽象層次越來越高,可提取不同層次特征越豐富,由此增加網(wǎng)絡(luò)的寬度和深度可以對(duì)網(wǎng)絡(luò)的性能有相應(yīng)的提升,但隨著網(wǎng)絡(luò)層數(shù)的不斷增加,由于樣本中噪聲干擾或模型復(fù)雜度過高,在反向傳播過程中網(wǎng)絡(luò)權(quán)值參數(shù)的連乘產(chǎn)生梯度彌散或爆炸問題.
殘差網(wǎng)絡(luò)(Residual Network)的出現(xiàn)很好地解決了這些問題,對(duì)于網(wǎng)絡(luò)層數(shù)的增加而出現(xiàn)的退化問題,使得在中間某一層已經(jīng)達(dá)到了較好的參數(shù)調(diào)整,所以更深層次的網(wǎng)絡(luò)至少保證了不低于低層次的網(wǎng)絡(luò),恒等快捷連接(shortcut connection)可以使映射對(duì)輸出的變化更靈敏,由于其學(xué)習(xí)的是兩層參數(shù)之間的差值,比直接擬合效果的作用占比更大,所以在訓(xùn)練更深網(wǎng)絡(luò)的同時(shí),可以保證性能不會(huì)退化,殘差網(wǎng)絡(luò)中的殘差模塊結(jié)構(gòu)如圖2 所示.這樣的結(jié)構(gòu)對(duì)于恒等映射,上一層的輸出x 到更深一層的輸出H(x),參數(shù)的學(xué)習(xí)調(diào)整函數(shù)F(x)會(huì)不斷擬合兩者相等的關(guān)系,而殘差結(jié)構(gòu)會(huì)學(xué)習(xí)F(x)=H(x)-x 這個(gè)差值,因?yàn)橄啾韧ㄟ^非線性層來擬合,將殘差推到0 會(huì)更加容易.使用這種殘差學(xué)習(xí)方法沒有減小回傳損失,但差值的學(xué)習(xí)對(duì)比原來線性學(xué)習(xí)的參數(shù)量更小,相當(dāng)于增加了對(duì)損失誤差的靈敏度,在不斷增加網(wǎng)絡(luò)層數(shù)后也可以保持精度的平穩(wěn)率.

圖2 基本殘差模塊Fig.2 Basic residual module
1.1.2 網(wǎng)絡(luò)結(jié)構(gòu)
特征融合結(jié)構(gòu)如圖3 所示,其基本原理借鑒YOLOv3 目標(biāo)檢測(cè)算法,通常卷積操作會(huì)獲得更高層次的語(yǔ)義信息,但隨著多次下采樣操作,對(duì)于艦船等低分辨率小目標(biāo)提取的信息不足,增加特征融合結(jié)構(gòu),利用特征金字塔中不同尺寸特征圖結(jié)合檢測(cè)有利于提取不同分辨率、多尺寸目標(biāo)的語(yǔ)義信息.
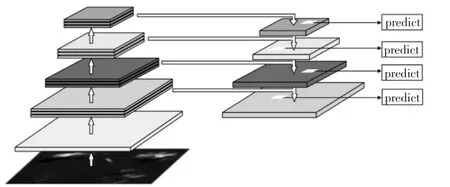
圖3 特征融合結(jié)構(gòu)Fig.3 Feature fusion structure
特征提取網(wǎng)絡(luò)如圖4 所示,由兩種步長(zhǎng)3×3 和1×1 的卷積層疊加而成.

圖4 特征提取網(wǎng)絡(luò)Fig.4 Feature extraction network
檢測(cè)的基本過程是產(chǎn)生不同尺寸的先驗(yàn)框,通過損失函數(shù)不斷調(diào)節(jié)位置,使用非極大值抑制算法根據(jù)目標(biāo)分類得到的邊界框概率排序后,去掉概率得分較低的邊框得到結(jié)果,篩選出預(yù)設(shè)閾值以上的集合.
對(duì)于尺寸為416×416 的原始圖片會(huì)生成4 種不同尺寸的特征圖,如圖5 所示,對(duì)應(yīng)提取不同分辨率的語(yǔ)義信息,因?yàn)橹苯邮褂枚喑叨忍卣鲌D分別進(jìn)行不同的檢測(cè)生成的參數(shù)量過大,為此多尺度特征圖通過上采樣與淺層特征融合可以使小目標(biāo)可以同時(shí)關(guān)注低分辨率的部分特征與全局信息.

圖5 網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.5 Network structure
如原始圖片尺寸為416×416,經(jīng)過5 次卷積操作和后隨的2 步長(zhǎng)的池化操作,其中一個(gè)輸出的張量為13×13×255,為了使用深層特征,經(jīng)過步長(zhǎng)為2的上采樣后,將特征層維度與26×26 的特征圖保持一致進(jìn)行后續(xù)的處理.
同樣26×26 的張量也經(jīng)過步長(zhǎng)為2 的上采樣與第一次下采樣后的特征圖維度相同,同樣深淺層特征融合分別為61 層和85 層,36 層和97 層,此外經(jīng)過對(duì)YOLOv3 特征融合網(wǎng)絡(luò)的增改,進(jìn)一步將11 層與步長(zhǎng)為2 上采樣后的109 層特征融合,從而更加充分地發(fā)揮層次結(jié)合的優(yōu)勢(shì).不同尺寸的特征圖的感受野映射原始圖片區(qū)域大小不同,將語(yǔ)義更強(qiáng)但尺寸更小的特征圖增加分辨率,融合更多語(yǔ)義信息達(dá)到多尺度檢測(cè)的目的.SAR 圖像中艦船目標(biāo)相比其他目標(biāo)有其獨(dú)有的特點(diǎn),本文考慮表1 中多種特征設(shè)計(jì)網(wǎng)絡(luò)結(jié)構(gòu).
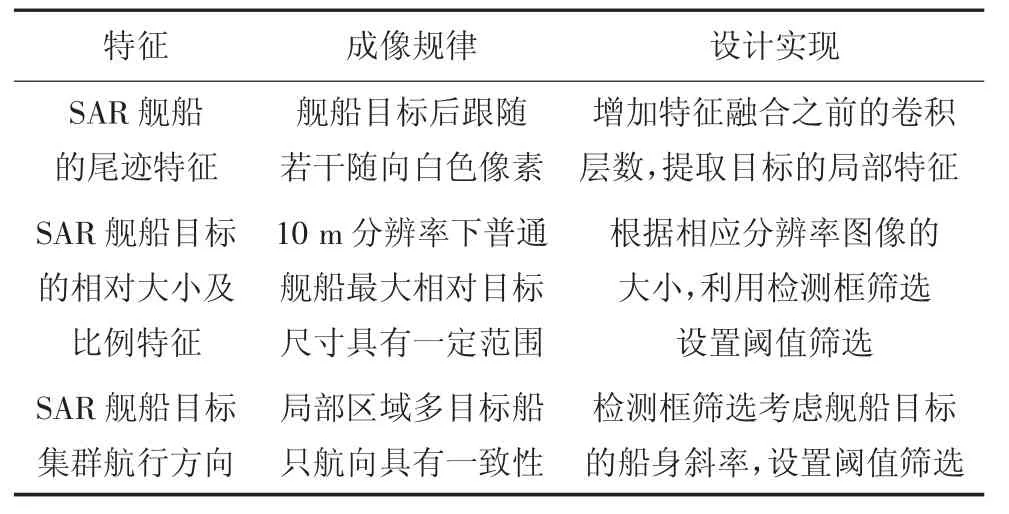
表1 針對(duì)SAR 艦船圖像目標(biāo)特征的設(shè)計(jì)Tab.1 Design for SAR image target features
SAR 圖像中的艦船若處在運(yùn)動(dòng)狀態(tài)中通常會(huì)展現(xiàn)尾跡,在圖像中體現(xiàn)為船尾后的白色像素軌跡,這也是識(shí)別為艦船目標(biāo)的重要特征,通過在特征融合之前增加卷積層數(shù),更有效地提取目標(biāo)的局部特征.
此外,實(shí)驗(yàn)中使用的為10 m 分辨率的SAR 圖像,根據(jù)查閱常用民用艦船的最大最小尺寸約為10 m 到460 m,考慮船身的長(zhǎng)寬比及高度等特點(diǎn),映射到圖像中像素約占10 到200 像素點(diǎn),在檢測(cè)框篩選階段設(shè)置相應(yīng)的閾值篩選掉不符合尺度的目標(biāo),同時(shí)設(shè)置船身長(zhǎng)寬比例臨界值為1 到10,目標(biāo)長(zhǎng)寬比例越界的篩選掉.同樣,除非在港口停泊處,在海面艦船航向中,方向基本水平一致,通過計(jì)算初步篩選目標(biāo)艦船的斜率考慮艦船集群的大致航行方向計(jì)算平均斜率,在檢測(cè)框篩選階段篩選目標(biāo)斜率與平均斜率差值大于0.5 的目標(biāo),船身與水平方向的斜率可以由目標(biāo)像素的坐標(biāo)位置(Xmin,Ymin),(Xmax,Ymax)推算得出,見圖6.
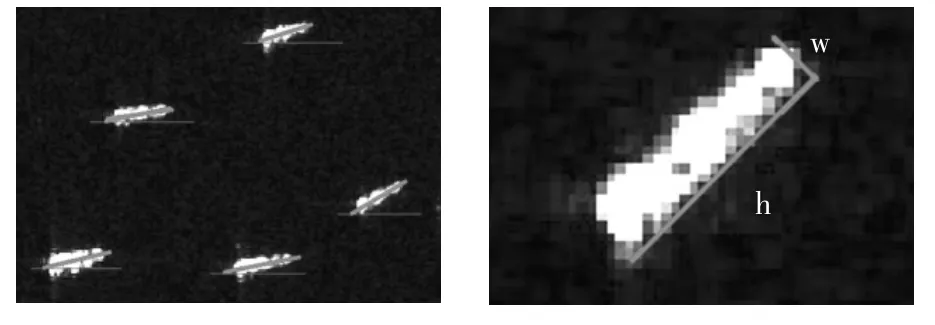
圖6 針對(duì)SAR 艦船目標(biāo)設(shè)計(jì)篩選過程Fig.6 Design screening process for SAR ship targets
1.1.3 損失函數(shù)設(shè)置
網(wǎng)絡(luò)將輸入圖像劃分成S×S 個(gè)網(wǎng)格,每個(gè)網(wǎng)格會(huì)預(yù)先產(chǎn)生3 種尺寸的邊界框,若網(wǎng)格中心點(diǎn)置于目標(biāo)則會(huì)由其負(fù)責(zé)檢測(cè).每個(gè)網(wǎng)格預(yù)測(cè)出檢測(cè)物體邊界框的4 個(gè)偏移坐標(biāo)、以及置信度得分,但因?yàn)閅OLOv3 采用了多個(gè)尺度的特征融合,邊界框的實(shí)際數(shù)量較大.因?yàn)槊糠N規(guī)模特征圖對(duì)應(yīng)4 個(gè)邊界框,所以得到的張量是S×S×[3×(4+1+80)]即255 的張量深度,其中包含邊框左上角的橫縱坐標(biāo)和邊框的長(zhǎng)寬、邊框置信度以及默認(rèn)80 種分類預(yù)測(cè).
損失函數(shù)為網(wǎng)絡(luò)預(yù)測(cè)結(jié)果與真實(shí)結(jié)果之間的偏差,這里損失函數(shù)由邊框的位置誤差、邊框的置信度誤差和對(duì)象分類的誤差三部分組成.
通過設(shè)置預(yù)測(cè)邊界框與真實(shí)邊界框的交并比來評(píng)估位置誤差(見圖7),在使用非極大抑制法篩選時(shí)考慮真實(shí)目標(biāo)框與預(yù)測(cè)框之間的重疊面積和邊框中心點(diǎn)位置,加速回歸效率,使用DIoU(Distance-IoU)邊框回歸機(jī)制(見圖8).

圖7 交并比Fig.7 Intersection-over-Union(IoU)
IoU 的測(cè)量標(biāo)準(zhǔn)只有bounding box 與ground truth 的面積重疊比率,考慮加入兩個(gè)框之間相對(duì)距離與并集所在最小矩形的相對(duì)大小,如下式:

式中:c 表示bounding box 的中心,c*表示ground truth 的中心,E 為對(duì)兩點(diǎn)計(jì)算歐幾里得度量,在二維圖像上即兩點(diǎn)間距離,d 表示兩者并集所在最小矩形的對(duì)角線長(zhǎng)度,通過這種IoU 損失可在預(yù)測(cè)框與真實(shí)框分離或中心點(diǎn)處于同一水平線時(shí),由于閉包約束可以更快地降低損失,加快收斂.

圖8 基于DIoU 損失邊框回歸Fig.8 DIoU loss for bounding box regression
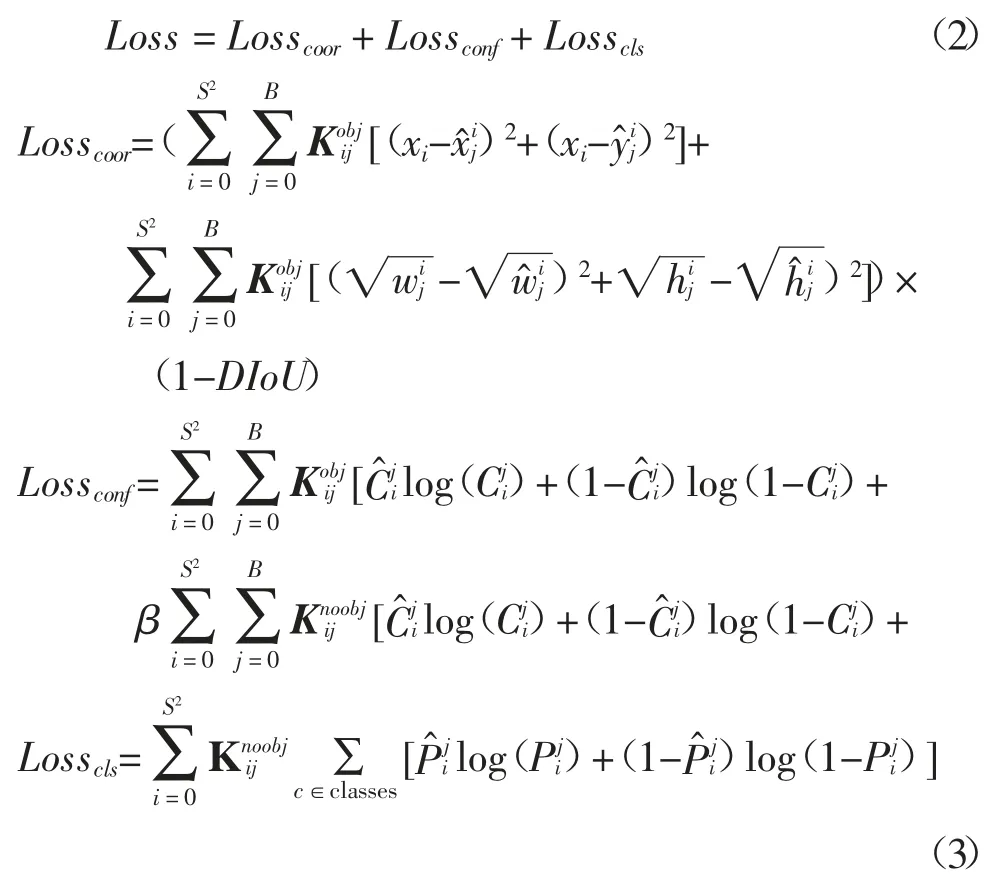
式中:w 和h 分別是ground truth 的寬和高,x 和y 為左上角坐標(biāo)點(diǎn),α 和β 為權(quán)重平衡因子,共S×S 個(gè)柵格,B 為當(dāng)前柵格中預(yù)測(cè)框總數(shù),為i 號(hào)柵格中檢測(cè)到的目標(biāo),為i 號(hào)柵格中編號(hào)為j 的預(yù)測(cè)框檢測(cè)到的目標(biāo)為i 號(hào)柵格中編號(hào)為j 的預(yù)測(cè)框未檢測(cè)到的目標(biāo).為預(yù)測(cè)框是否負(fù)責(zé)某個(gè)對(duì)象的參數(shù)置信度分?jǐn)?shù)為分類概率,對(duì)應(yīng)的真實(shí)框參數(shù)信息分別為
1)預(yù)測(cè)框的位置誤差:
2)預(yù)測(cè)框的置信度誤差:
根據(jù)交叉熵來表示置信度誤差,包括邊界框是否為前后景及是否包含目標(biāo)的置信分?jǐn)?shù),為避免非目標(biāo)置信分?jǐn)?shù)對(duì)整體置信誤差的負(fù)面影響過大,產(chǎn)生混淆,通過乘以權(quán)重因子β 減少不含檢測(cè)目標(biāo)的預(yù)測(cè)框?qū)p失函數(shù)的作用占比,這里設(shè)置β=-0.3.
3)對(duì)象分類的誤差:
若i 號(hào)柵格編號(hào)為j 的預(yù)測(cè)框中不包含目標(biāo),此項(xiàng)誤差損失不會(huì)參與計(jì)算,對(duì)象分類的損失誤差同樣使用交叉熵?fù)p失函數(shù)進(jìn)行收斂.
1.2 模型壓縮
通常情況下經(jīng)過卷積神經(jīng)網(wǎng)絡(luò)多輪訓(xùn)練所得的模型中會(huì)存在冗余信息,隨著模型復(fù)雜度的增加,所得的模型需要計(jì)算的浮點(diǎn)數(shù)操作會(huì)越來越大,模型體積也會(huì)過大,這樣不利于模型在存儲(chǔ)空間、運(yùn)算資源受限的平臺(tái)上部署使用,因此需要針對(duì)網(wǎng)絡(luò)模型特點(diǎn)對(duì)其進(jìn)行壓縮操作,本文用于深度壓縮的方法有權(quán)值參數(shù)共享和剪枝兩種.
1.2.1 權(quán)值參數(shù)共享
權(quán)重參數(shù)共享可以顯著減少網(wǎng)絡(luò)所使用的參數(shù)量,圖片經(jīng)過卷積操作后,與特征圖之間的映射關(guān)系存儲(chǔ)了大量參數(shù),通過隨機(jī)散列函數(shù)將參數(shù)重分配,使得部分重復(fù)參數(shù)可以共同使用,網(wǎng)絡(luò)參數(shù)矩陣經(jīng)過聚類等方式重新存儲(chǔ),使用較少的參數(shù)可以替換原參數(shù)矩陣.
權(quán)重參數(shù)共享存儲(chǔ)如圖9 所示,假設(shè)兩層神經(jīng)元之間的參數(shù)由矩陣V 表示,經(jīng)過散列存儲(chǔ)的參數(shù)集由R 表示,重新分配的參數(shù)經(jīng)過不同散列函數(shù)映射,由原來28 個(gè)參數(shù)降低到6 個(gè),壓縮了4 倍,由于原來重復(fù)的參數(shù)信息都在集合R 中,基本上保持泛化性能的同時(shí),大大減少了神經(jīng)網(wǎng)絡(luò)的存儲(chǔ)需求.
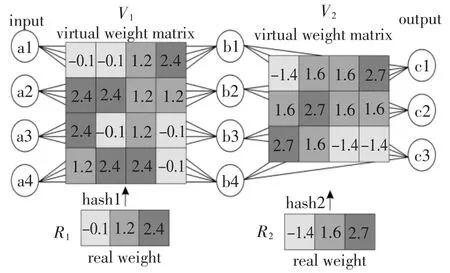
圖9 權(quán)重共享矩陣Fig.9 Weight sharing matrix
1.2.2 剪枝
神經(jīng)網(wǎng)絡(luò)的各層連接通常如圖10 所示,相鄰兩層的的神經(jīng)元連接數(shù)目較多,其中有很多冗余單元,如果不對(duì)密集網(wǎng)絡(luò)進(jìn)行裁剪操作會(huì)產(chǎn)生大量浮點(diǎn)乘法計(jì)算.兩層之間每條連接線都有相應(yīng)的權(quán)值,通過去除權(quán)值貢獻(xiàn)較低的連接,即將較小的權(quán)重置零來去除神經(jīng)鍵,若某一神經(jīng)元與上下兩層的連接權(quán)重都為零則去除次神經(jīng)元,這樣在基本保證模型準(zhǔn)確率的前提下大大減少了參數(shù)量,將原權(quán)值矩陣稀疏化,從而降低網(wǎng)絡(luò)的復(fù)雜度.
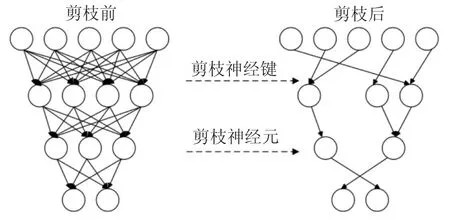
圖10 剪枝前后的網(wǎng)絡(luò)連接Fig.10 Network connection before and after pruning
裁剪部分主要針對(duì)BN 層進(jìn)行,BN 層引入了γ和β 兩個(gè)可學(xué)習(xí)重構(gòu)參數(shù).針對(duì)每次反向傳播過程,對(duì)L1 正則梯度和BN 層的梯度進(jìn)行結(jié)合,設(shè)置一個(gè)有序列表存儲(chǔ)裁剪BN 層中γ 參數(shù),設(shè)置裁剪閾值為0.9 進(jìn)行裁剪.未經(jīng)過閾值篩選的γ 通道去掉其權(quán)值大小,重新得到本層的結(jié)構(gòu)并將β 參數(shù)與后續(xù)的卷積模塊中BN 的運(yùn)行方差參數(shù)結(jié)合計(jì)算.
2 實(shí)驗(yàn)結(jié)果與分析
2.1 實(shí)驗(yàn)平臺(tái)與數(shù)據(jù)集
實(shí)驗(yàn)所使用的計(jì)算機(jī)硬件平臺(tái)是64 位Windows10 操作系統(tǒng),中央處理器為Intel(R)Core(TM)i5-8300H CPU@2.3GHz,獨(dú)立顯卡型號(hào)為NVIDIA GTX 1080,16 GB 內(nèi)存,CUDA 加速環(huán)境為CUDA 8.0和cudnn 6.0,采用的網(wǎng)絡(luò)開發(fā)框架為Darknet.
實(shí)驗(yàn)數(shù)據(jù)集采集自歐洲航天局哥白尼計(jì)劃(GMES)中的地球觀測(cè)衛(wèi)星哨兵一號(hào)(Sentinel-1)衛(wèi)星所拍攝的雷達(dá)影像,采集時(shí)間為2017-06-26 T 23:03:40.552573 到2017-06-26 T 23:04:05.551041,數(shù)據(jù)類型為IW GRD(干涉寬幅模式的地距多視產(chǎn)品),對(duì)諾福克港、圣地亞哥港、迪拜港等大型港口附近的艦船圖像目標(biāo)進(jìn)行處理,制作了PASCAL-VOC 格式艦船目標(biāo)遙感數(shù)據(jù)集,人工標(biāo)注了4 種不同種類的民用艦船.SAR 圖像分為方位和距離分辨率,方位分辨率為不同波束的方位向所能辨別的兩目標(biāo)之間最小距離,距離分辨率為同一方位角距離雷達(dá)不同被區(qū)分的最小距離.
該數(shù)據(jù)集包含不同距離分辨率(5~20 m)以及不同背景下(近岸、近海)不同尺寸的艦船目標(biāo),樣本場(chǎng)景的多樣性保證了訓(xùn)練出來的模型有更強(qiáng)的泛化能力,同時(shí)采用旋轉(zhuǎn)和反轉(zhuǎn)兩種方式對(duì)數(shù)據(jù)集進(jìn)行樣本擴(kuò)充,共計(jì)1 241 個(gè)目標(biāo),以4 ∶1 劃分為訓(xùn)練集和測(cè)試集.本文使用開源工具LabelImg 對(duì)數(shù)據(jù)集中的遙感圖像進(jìn)行了人工標(biāo)注,圖片標(biāo)注后,都會(huì)對(duì)應(yīng)生成相同文件名且后綴為.xml 的文件,該文件依次記錄了對(duì)應(yīng)圖片中所有標(biāo)注框的位置和目標(biāo)類別等信息.
2.2 網(wǎng)絡(luò)訓(xùn)練
使用在ImageNet 數(shù)據(jù)集上預(yù)先訓(xùn)練好的特征提取網(wǎng)絡(luò)模型,對(duì)訓(xùn)練參數(shù)進(jìn)行調(diào)整.
模型優(yōu)化算法的方法采用隨機(jī)梯度下降法(SGD),批量大小取64 更新控制訓(xùn)練樣本量,學(xué)習(xí)速率在訓(xùn)練開始為0.001,設(shè)置學(xué)習(xí)率衰減系數(shù)0.000 5 防止過擬合,為使批處理訓(xùn)練時(shí)權(quán)值參數(shù)震蕩加速收斂,使用帶有動(dòng)量因子梯度代替原梯度進(jìn)行參數(shù)更新,默認(rèn)設(shè)為0.9.訓(xùn)練過程中損失函數(shù)的變化情況如圖11 所示,經(jīng)過20 000 步迭代后網(wǎng)絡(luò)基本收斂.
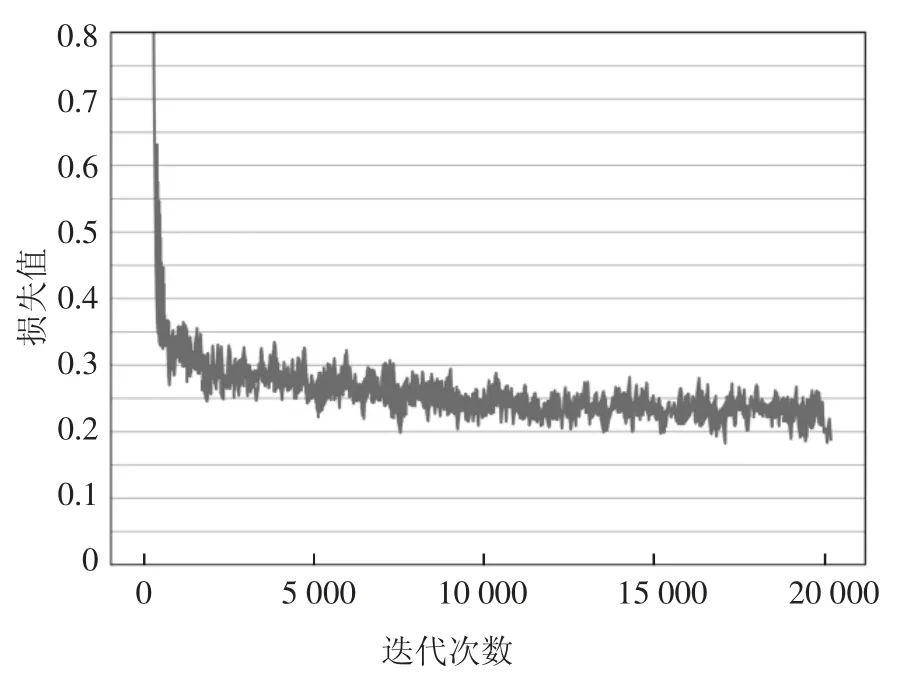
圖11 損失函數(shù)變化曲線Fig.11 Loss function curve
2.3 實(shí)驗(yàn)結(jié)果評(píng)估
為評(píng)估算法的檢測(cè)效果,采用如下式所示標(biāo)準(zhǔn)對(duì)檢測(cè)器的性能進(jìn)行定量化描述:

式中:Ntp表示正確檢測(cè)的樣本數(shù),Nfp表示錯(cuò)誤檢測(cè)的樣本數(shù),Nfn表示漏檢目標(biāo)的樣本數(shù),準(zhǔn)確率(precision)表示在所有被預(yù)測(cè)的目標(biāo)樣本中,預(yù)測(cè)正確的比例,召回率(recall)表示預(yù)測(cè)正確的樣本數(shù)在所有真實(shí)樣本數(shù)中的比例.同時(shí),使用如下式所示的F1值來表示算法的綜合性能.

首先對(duì)測(cè)試集的實(shí)驗(yàn)結(jié)果進(jìn)行分析,測(cè)試結(jié)果如表2 所示.

表2 測(cè)試集的實(shí)驗(yàn)結(jié)果Tab.2 Experimental results of test set
圖12 給出一些典型的測(cè)試結(jié)果例圖,其中檢測(cè)出的各類目標(biāo)分別用不同的方框標(biāo)記出來.不同場(chǎng)景下算法的檢測(cè)結(jié)果如圖13 所示.其中圖13 的第一行、第二行為海面艦船目標(biāo)檢測(cè)結(jié)果,該場(chǎng)景下艦船的特點(diǎn)是目標(biāo)相對(duì)背景較小,容易造成漏檢以及定位不準(zhǔn)的問題,部分目標(biāo)有較嚴(yán)重的拖尾痕跡,算法可以較為準(zhǔn)確地完成對(duì)海面艦船目標(biāo)的檢測(cè).圖13 的第三行為復(fù)雜背景下的近岸艦船目標(biāo)檢測(cè),該類艦船目標(biāo)特點(diǎn)是背景復(fù)雜,艦船目標(biāo)與岸邊建筑難以區(qū)分,有若干港口處模糊小目標(biāo)漏檢.可以看出,算法對(duì)河道、港口等多種背景下不同尺寸的艦船目標(biāo)均有較好的檢測(cè)效果.其次,為測(cè)試算法的泛化能力,同時(shí)準(zhǔn)備了馬六甲海峽、安特衛(wèi)普港和長(zhǎng)三角等大型港口的若干原始大幅面SAR 圖像進(jìn)行測(cè)試,測(cè)試圖片幅面平均為25501×16731 像素,對(duì)比另外兩種檢測(cè)算法部分檢測(cè)結(jié)果如圖13 所示,實(shí)驗(yàn)表明,本文方法完成端到端的檢測(cè),平均準(zhǔn)確率為91.39%,召回率為93.03%,F(xiàn)1值為92.20%,可以達(dá)到對(duì)SAR 圖像艦船目標(biāo)的有效處理.
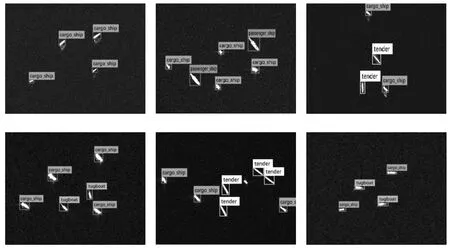
圖12 測(cè)試示例圖片F(xiàn)ig.12 Test sample pictures
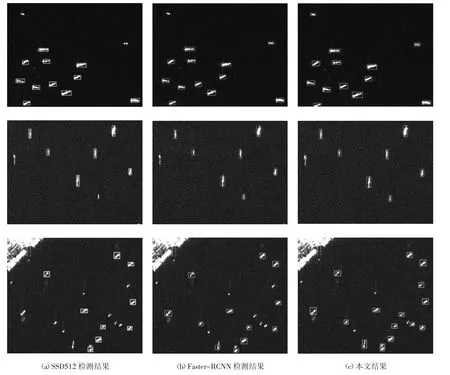
圖13 不同場(chǎng)景下檢測(cè)結(jié)果對(duì)比Fig.13 Comparison of detection results in different scenes
表3 以幀/s(Frame per second)給出了檢測(cè)程序運(yùn)行的效率,有助于評(píng)估本文方法的實(shí)時(shí)數(shù)據(jù)處理和目標(biāo)檢測(cè)的性能.
表3 同時(shí)給出了本文方法與其它目標(biāo)檢測(cè)算法在艦船數(shù)據(jù)集上的測(cè)試性能對(duì)比,本文方法的準(zhǔn)確率為91.39%,比SSD 和Faster-RCNN 分別提高了4.03%和2.13%,得益于網(wǎng)絡(luò)結(jié)合深層特征的多尺度檢測(cè),采用特征映射模塊和殘差網(wǎng)絡(luò)模塊,獲得了更豐富的語(yǔ)義信息.

表3 各方法對(duì)比Tab.3 Comparison of methods
本文對(duì)實(shí)驗(yàn)用的模型進(jìn)行了壓縮,并測(cè)試了壓縮后模型的識(shí)別能力.良好的模型壓縮方法在保證不損害檢測(cè)效率的前提下追求更大的空間節(jié)省和更快的運(yùn)行效率.表4 描述了模型壓縮前后的識(shí)別正確率、壓縮率以及效率.由表可知,本文提出的權(quán)值參數(shù)共享+剪枝的方法將模型從272 MB 壓縮到了34 MB,壓縮了8 倍,并且精度僅損失1.23%,證實(shí)了壓縮方法的有效性.

表4 模型壓縮前后的統(tǒng)計(jì)數(shù)據(jù)Tab.4 Statistical data of the original model and compressed model
3 結(jié)論
本文設(shè)計(jì)了一種基于YOLOv3 框架的水面SAR遙感圖像中艦船目標(biāo)快速識(shí)別和分類方法,通過采集并標(biāo)注SAR 圖像艦船目標(biāo)樣本,制作相應(yīng)的數(shù)據(jù)集用于模型訓(xùn)練,結(jié)合殘差單元與多尺度訓(xùn)練,增強(qiáng)網(wǎng)絡(luò)對(duì)不同尺寸目標(biāo)尤其小目標(biāo)的良好適應(yīng)性,針對(duì)艦船目標(biāo)特點(diǎn)設(shè)計(jì)網(wǎng)絡(luò)檢測(cè)、篩選過程.采用基于相對(duì)距離的邊框交并比策略與權(quán)重因子的損失函數(shù),提高收斂速度與檢測(cè)效果,使用權(quán)值參數(shù)共享和剪枝方法對(duì)模型進(jìn)行輕量化處理.端到端的訓(xùn)練簡(jiǎn)化了訓(xùn)練流程,無需人為進(jìn)行子問題的劃分,且通過實(shí)驗(yàn)表明模型對(duì)新數(shù)據(jù)集有較好的適應(yīng)能力.同時(shí)本文研究也為星載SAR 等目標(biāo)識(shí)別系統(tǒng)的設(shè)施提出了新的思路,基于卷積神經(jīng)網(wǎng)絡(luò)等深度學(xué)習(xí)方法的SAR 圖像艦船目標(biāo)檢測(cè)預(yù)計(jì)將面向?qū)崟r(shí)、廣域、高速、精準(zhǔn)的應(yīng)用需求不斷發(fā)展完善.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19