不同滲透率下自動駕駛混合交通流在天氣條件影響下的通行能力建模
2021-04-28 19:28:07施磊劉東儉陳海建
時代汽車 2021年8期
施磊 劉東儉 陳海建


摘 要:隨著世界范圍內對自動駕駛汽車及其相關產業發展的高度重視,自動駕駛車輛上路已成為重點領域協同創新、構建未來交通系統的重要載體。本文主要研究自動駕駛車輛不同滲透率參與的混合交通流受場景天氣條件的耦合影響因素下的復雜車輛行為邏輯分析,影響機理解析,跟馳模型及通行能力模型構建等。最后我們通過SUMO仿真實驗對模型進行嵌套及分析,以期對自動駕駛汽車在測試及上路引導中起到重要理論決策依據。
關鍵詞:自動駕駛 混合交通流 天氣影響 交通仿真
Autonomous Driving Mixed Traffic Flow under Different Penetration Rates under the Influence of Weather cConditions Capacity modeling
Shi Lei Liu Dongjian Chen Haijian
Abstract:As the world attaches great importance to the development of autonomous vehicles and related industries, autonomous vehicle launch test gradually becomes an important carrier for collaborative innovation in key areas and the construction of future transportation systems. Our paper mainly studies the logic analysis of complex vehicle behavior in the mixed traffic flow with autonomous vehicles under different penetration rates, considering the coupled influence factors of the scene weather conditions. We also analyze its influence mechanism, the construction of the car-following model and the capacity model for the mixed traffic flow with autonomous vehicles. Finally, we simulate and analyze the above models through the SUMO simulation experiment, which plays an important theoretical basis for the test and road guidance of the automatic driving vehicle.
Key words:autonomous vehicle, mixed traffic flow, weather factors, traffic simulation
1 自動駕駛車輛參與下的混合交通流模型構建
目前,自動駕駛汽車已成為全球汽車產業發展的戰略制高點。在自動駕駛汽車測試及上路初期不可避免的會存在自動駕駛車輛與人為駕駛車輛均存在的混合交通流。在該階段,原有的傳統交通理論模型會失去效力,人為駕駛員的感知決策行為也會因為自動駕駛車輛的出現而發生改變。因此,本文針對自動駕駛混合交通流下復雜車輛行為與車車間互相影響關系,提出基于車輛高精度動力學下的混合交通流基本模型,建立自動駕駛汽車混入后的交通分析方法。從自動駕駛和人為駕駛車輛動力學出發,結合了車輛特性,構建其在混合交通流中的行為模型與微觀混合流跟馳模型。
1.1 自動駕駛車輛特征行為分析
針對自動駕駛車輛參與的混合交通流進行模型構建時,首先應該考慮與傳統道路的區別:當交通流的密度較大時,車輛之間的行車間距減小,道路上車輛的行駛狀態都受前車行駛狀態的約束,人為駕駛員只能主觀判斷前方單車或局部車組提供的信息來調整自車運動狀態,由于駕駛員在車輛跟馳行為中對行車安全性的反應敏感度不同,車輛之間的跟馳行車間距也表現出差異性。而在自動駕駛環境下,由于存在車車通信、車路協同,降低了“人”所產生的在交通理論研究過程中出現的隨機性、不確定性和差異性,提高了交通系統對于周圍環境的主動反應水平。同時,針對具體的場景進行模型參數建立時,應考慮到實際路況的多變性,在假設中應盡可能使變化范圍增大。當具體的自動駕駛車輛參與在交通流中,人為駕駛員在遇到自動駕駛車輛時的行為準則和反應會與常規人為駕駛有較大區別,因此車輛的跟馳模型還需要進一步優化。
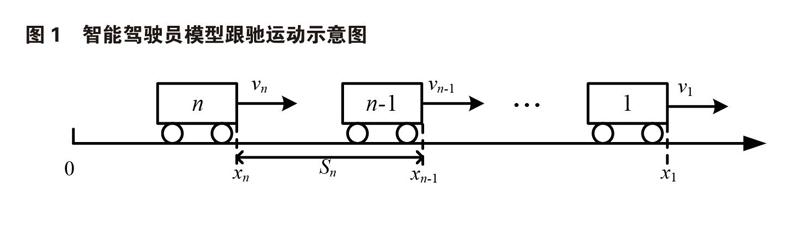
1.2 混合流優化跟馳模型構建
綜合上述特征行為,本文改進了傳統的模型。引用Treiber和Helbing兩位學者借鑒牛頓力學的思想提出了社會力(Social Force)的概念[1],認為車輛的加速度可以看作是源于駕駛者期望提速的“動力”和前方車輛阻礙形成的“阻力”的綜合影響。基于此,在智能駕駛員模型(Intelligent Driver Model,IDM)的基礎上,再進行進一步優化,具體模型表達式如下:
其中:—理想駕駛速度;
—期望間距;
—靜止安全距離;
—安全時間間隔;
a—起步加速度;
b—舒適減速度。
傳統IDM模型考慮了期望速度、期望間距、前后車速度差等多因素對跟馳行為的影響,模型描述的跟馳行為能夠較好地符合實際情況。此外,IDM模型還具有所含參數物理意義明確、易于標定及優化的特點。因此,該模型較為靈活適用,也可以具體的結合自動駕駛混合流車輛進行調整和優化。
在此基礎上,考慮觀察到前方車輛或側方車輛為自動駕駛車輛時,原安全距離公式調整為:
d
其中h是常數,指有人駕駛車輛的車頭時距,Vt表示車輛在t時刻的車速,d表示當前車車頭與前車車尾之間的間距,li表示車身長度。
用IDM和CACC跟車模型對自動駕駛車輛的跟馳行為進行量化[2]。與IDM相比,CACC模型基于真實的車輛軌跡數據,更能捕捉CAVs的以下特性。因此,自動駕駛車輛的跟馳模式如下式所示:
式中,為前一控制時間的速度;
e為實際車距與期望車距之間的誤差;
為e的導數形式;
為最小安全距離;
為期望車頭時距;
和d為控制參數。
在導出上式中的速度后,可得到混合流跟馳模型下自動駕駛汽車的期望加速度計算公式,如下式所示:
由此在具體的自動駕駛車輛下的跟車模型中車輛的基本速度,加速度,形式方式,有了最基本的模型界定。根據對于真實交通流中的車輛分析及仿真實驗中的結果對優化混合流跟馳模型進行了標定,在改模型的最佳參數為=0.01s,=0.45s-1,kd=0.25。
2 基于場景因素耦合影響下的通行能力分析
與傳統汽車運行方式不同,自動駕駛車輛參與下的混合流中具體車輛的性能表征及其行為方式會有明顯的感知特異性,在自動駕駛初期,這一現象會更加擴大。這是人為駕駛車輛、自動駕駛車輛、道路交通環境三者相互耦合的結果,傳統的單一工況的道路交通模型在目前的混合流中并不適用,還需要針對各種不同的典型場景。因此,關于混合交通流整體道路區域內的通行能力推導,不同道路環境條件下整體交通運行狀況的解析,車輛在不同滲透率下標準當量的需求分析,是進行自動駕駛車輛測試和上路投放的重點研究方向。
2.1 混合流優化通行能力模型構建
選擇考慮采用改進形式的速度優化模型(FVD),結合交通分配法與割集法的功能特點,主要考慮其模型形式較為靈活,可以適應不同場景氣候條件下的場景變化,同時對于駕駛單位的變化更為明顯,如下式所示:
式中,k和λ是靈敏度系數;
是當前車輛和前一車輛車頭時距;
是當前車輛的速度;
是速度的導數形式;
是當前車輛和前一車輛之間的速度差;
是車輛長度;
是優化的速度函數,如下所示:
式中,為自由流速;
α為敏感參數;
為最小安全距離。
對于整體交通流而言,將優化速度函數帶入加速度公式,可以得到改進的FVD的期望加速度計算公式,如下式所示:
上式中的參數值根據道路的實際情況與環境內容,投放比例相互協調,在基本假設中的基本情況下,根據上式結合仿真結果最優化標定自動駕駛車輛行駛具體參數為=33.0m·s-1,=2.46m,k=0.629s-1,λ=4.10s-1,α=1.26s-1,L=5.0m。
同時,根據不同混合流中自動駕駛車輛滲透率對于整體交通流的影響,在行駛過程中假設在某個固定的時段,有k輛自動駕駛車輛行駛通過,則在某個斷面內,出現自動駕駛車輛的概率應為:
因此對于預估車頭時距應為可能出現的概率的數學期望并進行累加
其中hk(n)為整體測試混合流路段在投放n輛車輛中有k輛自動駕駛車輛時的平均車頭時距。并對Ak進行矩陣形式的累加。計算所得自動駕駛車輛出現的數學期望應為:
故計算的車頭時距應為:
K,n為混合流道路中的自動駕駛車輛滲透率
為自動駕駛車輛間車頭時距
為自動駕駛車輛與人為駕駛車輛的車頭時距
為人為駕駛車輛間車頭時距
整體混合流路段中通行能力如下式所示:
然而顯而易見的,對于該通行能力表達式而言,車輛的具體滲透率,車道運行的劃分,以及其他客觀、主觀因素都會對該模型進行影響。
2.2 天氣場景影響變化
不良天氣將會導致的道路容量不足和交通運行效率降低,會加劇路網交通供需矛盾。在自動駕駛汽車參與的混合流下,這一變化將會發生改變。研究不利天氣條件下的混合交通流特性,掌握不同滲透率下惡劣天氣對混合流通行能力的影響,有利于優化測試區域內的混合流通行能力模型,從而對自動駕駛車輛投放進行科學有效的交通管理措施和應對預案,保障混合流路段的安全高效。研究結果表明,降雨條件下,受到路段線形復雜化、車道增多以及路段出入口車流干擾等因素的影響,道路通行能力受到車輛本身因素制約,有不同程度的降低,其中復雜線形路段人為駕駛員受到的影響最為明顯。降雪條件下由于能見度的下降和地面摩擦系數的急劇減小導致道路得通行能力出現明顯變化,行駛速度減小,車輛減速能力明顯下降。大霧天氣下由于能見度的急劇下降,人為駕駛車輛對于環境得判斷能力明顯減弱,對于正常行駛車速造成重大影響。基于此,構建整體的影響評估模型如下:
其中,為整體道路通行能力
,為天氣影響下的混合流路段中為正常情況下的自動駕駛車輛/人為駕駛車輛影響比例系數。與車輛比例及道路條件等因素相關。
為正常情況下的自動駕駛車輛/人為駕駛車輛的標準道路通行能力
,,,,為天氣條件影響下的自動駕駛車輛/人為駕駛車輛性能衰減系數,能見度影響系數,判斷影響系數。
3 基于SUMO下的混合交通流典型場景運行仿真分析
SUMO(Simulation of Urban Mobility)是一個微觀的,空間上連續,時間上離散的交通仿真軟件。其場景信息獲取與交互方便,模型標定簡易等優勢使它成為最廣泛使用的交通仿真軟件之一。因此本文中使用的SUMO作為仿真平臺,同時使用Python進行交互控制。
3.1 場景參數設置
由于自動駕駛車輛通過檢測器檢測前車,而人為駕駛車輛通過駕駛員的感知跟馳前車,因此兩者的跟馳行為模式不同,仿真中用章節一中提出的根據不同交通參與者進行分類跟馳模型進行標定,并對混合流進行綜合矯正。
當目標路段經歷不同的天氣場景時,惡劣天氣會對車輛尤其是人為駕駛車輛產生較大影響:大雨天氣和大霧天氣視野能見度受到一定影響,這會改變人為駕駛車輛的駕駛行為;雪天等路面濕滑天氣會影響路面粘滯系數,兩種車輛的駕駛狀態都會改變。因此本節標定了不同天氣對自動駕駛車輛和人為駕駛車輛的跟馳模型影響值,并進行仿真計算量化其對道路交通安全的影響。
基于此,實驗設計將進行幾種常見天氣包括晴天、雨天、雪天、霧天的跟馳模型參數標定,測試其對通行能力的影響。各場景特性描述如下:
場景1:晴天,正常駕駛條件。
場景2:中度的雨天,路面濕滑且能見度比較小。
場景3:大雨天氣,泥濘的路面且能見度極差。
場景4:輕微的霧,能見度受影響。
場景5:中度的霧,能見度較差。
場景6:雪天,濕滑的路面,較差的能見度。
不同場景會導致車輛跟馳模型參數的變化,表1呈現了不同天氣下的視野狀態,粘滯系數,視野可感知距離,自由流速度的參數值。
從表1可以看出,在晴天情況下視野最好,視野可感知距離為500m,而其他天氣視野不能達到最佳狀態,視野可感知距離均有不同程度的降低,特別是大霧天氣下距離降為20m,車輛只能以極低的速度行駛。粘滯系數方面,由于霧天并不會影響路面狀態,因此晴天和霧天的值最大為0.4。而雨天特別是雪天由于路面濕滑,粘滯系數極低,車輛速度不同程度的降低。晴天的自由流速度最大,其他場景下自由流速度不同程度的降低。
在SUMO交通運行仿真平臺中,針對不同天氣狀態和自動駕駛車滲透率對通行能力和自動駕駛車輛標準當量的影響進行了仿真評價,仿真路網選擇包含普通直線路段和少部分環道的三車道矩形閉環道路,路段總長度為5km,自動駕駛車輛和人為駕駛車輛分別按照1:3,1:1,3:1三種比例滿負荷加載在仿真路網上,具體如圖2所示:
3.2 天氣條件的影響結果
在此基礎上,進行仿真計算,SUMO仿真運行30分鐘,獲得結果如圖3所示:
從上圖可以得到:
(1)大霧天氣和雪天的通行能力相對較低。
總體而言,通過橫向對比,晴天的通行能力最高,而大霧天氣和雪天通行能力相對較低,這是由于在惡劣天氣下車輛行駛速度較低,且傾向于與前車保持較大的車頭時距造成的。
(2)晴天和中度雨天滲透率的50%滲透率時通行能力最大。
比較不同的自動駕駛車輛滲透率,可以看出晴天和中度雨天中,50%的滲透率,即自動駕駛車輛和人為駕駛車輛的比例為1:1時,通行能力達到最高,過高或者過低的滲透率都會導致通行能力的降低。這是由于較低的滲透率使得通行能力的提高效果不明顯,而過高的滲透率會由于智能車輛較為保守的駕駛行為,略微降低通行能力。
(3)惡劣天氣下自動駕駛車輛滲透率的提高會增加通行能力。
在霧天和大雨天氣,通行能力隨著滲透率增加而提升,這是由于自動駕駛車輛通過檢測器檢測周圍車輛,不受能見度影響,且自動駕駛車輛在濕滑路面行駛的穩定性較好,由于滲透率低時通行能力并不高,因此滲透率升高到75%時能顯著提高通行能力。
惡劣天氣對試驗場通行能力有較大的影響,不同天氣狀況下自動駕駛車輛的標準當量也不相同。基于通行能力的結果仿真實驗計算了對應狀態下的標準當量值如表2所示:
從上表可以看出,(1)晴天狀態下50%滲透率時標準當量最小,而其他天氣狀態下,隨著滲透率的增加,標準當量逐漸變小。(2)當自動駕駛車輛滲透率較低時,惡劣天氣對標準當量的影響較大,特別的是在大霧天達到4.68,而雪天也達到了4.32,少量的自動駕駛車輛的加入造成的混合車流由于車輛的跟馳模型不同,造成交通流更大程度的紊亂,因此自動駕駛車輛的標準當量較大。
4 結論
根據本文上述的研究內容表明,在具體路段投放自動駕駛車輛進行測試時需要實時考慮到路段自動駕駛車輛滲透率,天氣環境因素的影響。實驗結果表明,天氣變化對混合交通流的通行能力和自動駕駛車輛標準當量折算系數均有較大影響,投放車輛時需要在不同天氣下按相應比例投放兩種車型,以期達到最大的通行能力。例如在晴天時采用中等滲透率會達到較好的通行能力,此時自動駕駛車輛的標準當量也較小。而在大霧天氣,投放更多的自動駕駛車輛提高滲透率,由于它受能見度影響較小,故整體車流仍具備較高的通行能力且標注當量不至于過大。
基金項目:國家重點研發計劃項目-測試示范區協同創新的環境構建、運行組織與管理技術研究(2018YFB0105201)
參考文獻:
[1]Treiber, M. , Hennecke, A. , & Helbing, D. . (2000). Congested traffic states in empirical observations and microscopic simulations. Physical Review E,[J],62(2),1805-1824.
[2]Shladover,S.E., Nowakowski, C. , Lu, X. Y., & Ferlis,R..(2016). Cooperative adaptive cruise control: definitions and operating concepts. Transportation Research Record Journal of the Transportation Research Board,2489,145-152.