激光局域網絡的混沌控制及并行隊列同步
2021-05-06 01:02:50顏森林
物理學報 2021年8期
顏森林
(南京曉莊學院電子工程學院, 南京 211171)
1 引 言
混沌一直是非線學科學、復雜動力學網絡與系統研究領域中一個重要學科.混沌動力學變化規律難以預測, 其信號具有隨機變化等特性并被廣泛應用在多個領域[1-11].自從20 世紀90 年代Ott 等[12]發現“OGY”混沌控制方法以來, 混沌控制作為控制科學的一個重要的研究領域得到了廣泛重視, 有微擾法、自適用控制法、線性反饋控制法、偶然正比反饋控制法等[13-15].激光混沌控制作為一個重要研究領域也一直受到人們的廣泛關注并獲得許多重要研究成果[16-25], 其控制技術有電流微擾法、光反饋法、相移調制法、雙劈雙反饋方法等.復雜動力學網絡與系統在人工智能、通信系統與網絡工程等方面具有重要的研究價值.高維多節點網絡混沌同步及超混沌同步、時空混沌同步、星形網絡同步、鏈式同步、多通道混沌通信等有了廣泛的應用研究成果[26-36].為了深入開展激光混沌控制與應用研究[37-41], 本文基于網絡混沌同步及激光混沌控制的思想方法[26-41], 針對光網絡光傳送、激光電流驅動與光電放大與時間調控等技術的特點, 開展了激光局域網絡(LAN)的混沌控制研究, 提出“單隊列-雙參數”激光LAN 的混沌控制新方法, 建立了一個新的“單隊列-雙參數”光電延時反饋控制條件下的激光LAN 的混沌控制系統, 以及并行隊列同步的光學局域網絡及其數學物理控制模型; 證明了網絡利用光“交叉驅動-反饋”光發送與光聯接方法能夠實現并行串聯隊列同步; 提出光電時延雙參數可調控的激光LAN“并行多點混沌載波同步發射及其在光學超寬帶通信中應用”的一個案例,此案例也可進行交替發射或聯合通信的推廣.我們研究發現, 對該激光網絡單結點激光器的混沌控制難以實現對整個網絡系統的混沌控制, 為了克服這個困難, 提出并研究了對一個隊列的激光器控制的“單隊列-雙參數”光電延時反饋的混沌控制方法,其中單隊列多維度結點被控制演化為無限維度, 該方法實現了對整個網絡系統的混沌控制的目標, 即實現對網絡全部結點激光器的混沌控制, 并實現網絡的并行隊列同步.由此, 給出關于含時延的超越方程理論的分析式及系統可控的理論預言; 還給出兩組并行隊列同步方程理論公式及分析.研究發現: 雖然是單隊列激光器的混沌控制, 但是仍然可以實現兩鏈路隊列所有結點激光器的混沌控制, 因為本網絡存在著“交叉驅動-反饋”作用影響能夠引導控制另外一鏈路激光器動力學行為; 如有兩種不同類型周期狀態同時被控制出現在兩鏈路上, 這種混沌控制具有“兩態”物理現象呈現, 能夠實現并行兩路隊列的激光器動力學行為同步.這是一種新構建的可調控的激光LAN 系統, 具有局域光網絡光傳送與光聯接核心可控制技術要素, 具有取得并行兩路不同隊列混沌控制及同步特點.本網絡物理結構主要特點是: 該系統與傳統上的星形網絡僅有一個中心結點結構相比較具有不同的結構特點, 激光LAN 具有雙中心結點結構特點, 其中激光混沌發送源有兩個異激光器系統耦合構成組成雙中心產生雙光輸出, 兩中心聯結串聯了兩個路徑; 由于兩個路徑由兩不同種類激光器組成(兩個不同路徑由兩類不同系統構成結點), 這與傳統上高維多節點網絡混沌同步的結點(如通常全部結點有相同系統構成或異系統構成同樣結點)還是有區別的; 而且本系統“交叉驅動-反饋”網絡結構與全局耦合網絡、最鄰近耦合網絡(主要特點是“耦合”)等也是有區別的.在網絡物理狀態呈現上, 由于結構不同,傳統上網絡系統同步通常呈現的是某個態的同步,本系統物理動力學狀態變化特點是可呈現出并行的“兩態”同步, 還可以實現網絡混沌動態控制及同步.為了進一步開展激光混沌通信應用研究, 還對該系統進行了激光LAN 并行多點混沌載波同步發射及在激光混沌超寬帶通信應用等研究.傳統上激光混沌通信通常是兩個或多個混沌激光器發收通信或多信道通信, 本系統特點是可以進行并行網絡通信以及交替發射或網絡組合聯合通信的推廣, 具有光網絡組合與聯合超寬帶光通信功能特點.研究發現該激光LAN 可以被控制引導到1 周期、2 周期、3 周期和其他類周期上, 并能在兩條鏈路上分別實現網絡結點隊列多種類周期同步.在此基礎上, 我們發現該受控的LAN 的兩個類周期同步區, 成功實施了激光LAN 并行多點混沌載波同步發射與激光混沌超寬帶通信.所以本研究對局域網絡、光學網絡、復雜動態系統、控制科學、混沌及同步等方面的研究有一定的參考價值.
2 激光局域網絡的控制與并行隊列同步的網絡結構及數學物理模型
基于我們曾經提出的2N維激光兩路串聯同步系統[41], 并主要為了說明 LAN 控制科學問題,這里簡化該系統為雙路四結點并行串聯隊列同步激光LAN.并針對激光LAN 控制思想, 進一步提出激光LAN“單隊列-雙參數”光電延時反饋控制下的并行隊列同步的數學物理網絡模型, 如圖1所示.
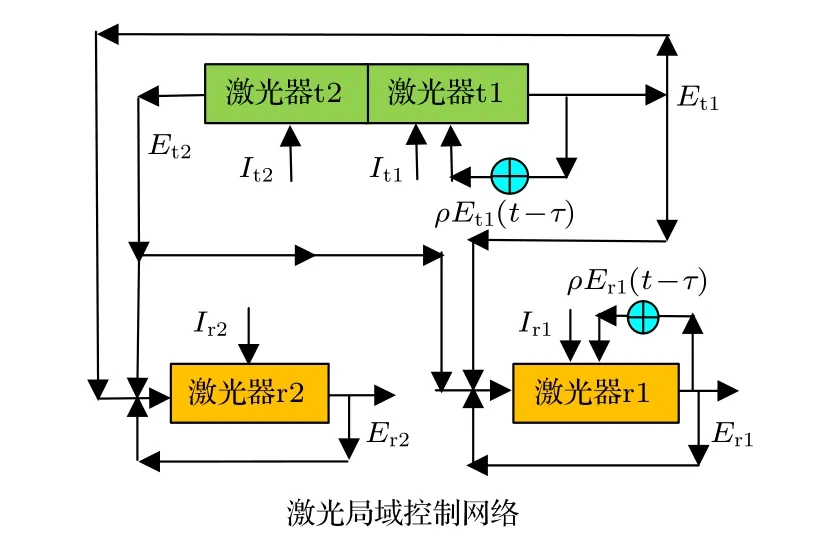
圖1 激光局域控制網絡圖, ⊕表示光電轉換控制器Fig.1.A controlled laser local area network.Signal ⊕ is the photoelectric controller.
圖1 中LAN 有4 個激光器分別構成網絡結點.其中, 兩個空間耦合激光器t1 和t2 構成混沌信號發生器網絡結點[23-26], 其余兩個獨立激光器r1 和r2 為網絡信號接收網絡結點.激光器t1 和r1 串聯為一隊列, 激光器t2 和r2 串聯為另外一個隊列, 即形成兩個并行隊列.同時, 激光器t1 驅動激光器r2, 激光器t2 驅動激光器r1, 為了實現LAN兩路網絡結點并行隊列同步, 網絡結點r1 和r2 激光器都有一光學反饋回路.由此形成“交叉驅動-反饋”網絡并行隊列同步結構.原則上, 隊列激光器r1 與t1 有相同的參數, 隊列激光器r2 與t2 有相同的參數.為了控制該激光LAN 動力學行為, 設計出激光器t1 和r1 都增加一個光電延時反饋控制回路, 其中光電轉換控制器能夠把激光器t1 和r1 部分光轉換成為光電流并放大反饋到它們各自激光器驅動電路上.由此形成t1 和r1 隊列的“單隊列-雙參數”光電延時反饋控制(存在著時間延遲和反饋水平兩參數的變化調控)下并行隊列同步的激光LAN, 這樣得到可控的激光LAN 的數學方程組[17-27]:
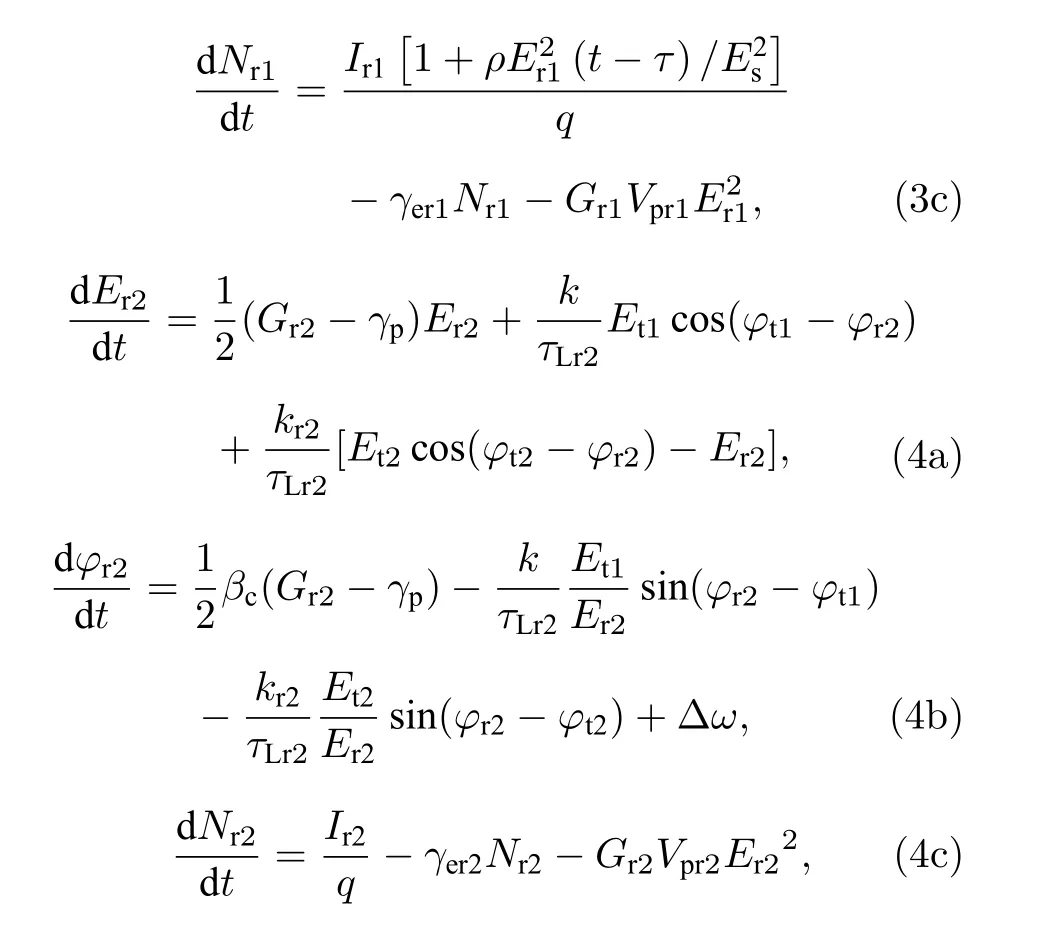
其中腳標t1, t2, r1, r2 分別代表激光器t1, t2, r1,r2;E,φ和N分別表示激光振幅、相位和載流子數.激光器t1 和r1 的腔長是激光器t2 和r2 腔長的2 倍, 由此導致兩個光學光路是由兩組不同參量激光器串聯成兩個不同隊列組合構成.載流子非線性損耗速率和模式增益分別是
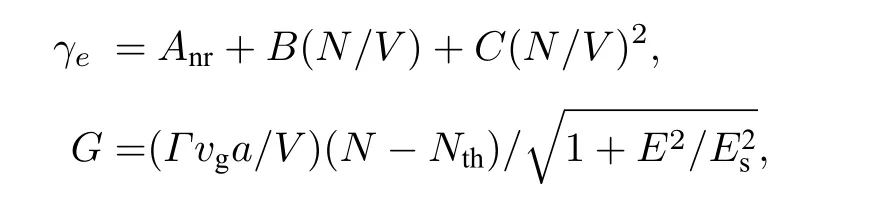
其中, 光子群速度是vg, 模式體積是Vp=V/Г,激光在透明時的載流子數和密度分別是Nth=nthV與nth,γp=vgαm是光子損耗速率, 激光器其他基本物理參量說明見表1.物理量ρ和τ是光電延時與放大反饋調控參量, 其數值變化可由光電轉換控制器等控制設施完成.其中,ρ表示反饋水平(即光電轉換放大與反饋)參量,τ是延遲時間.
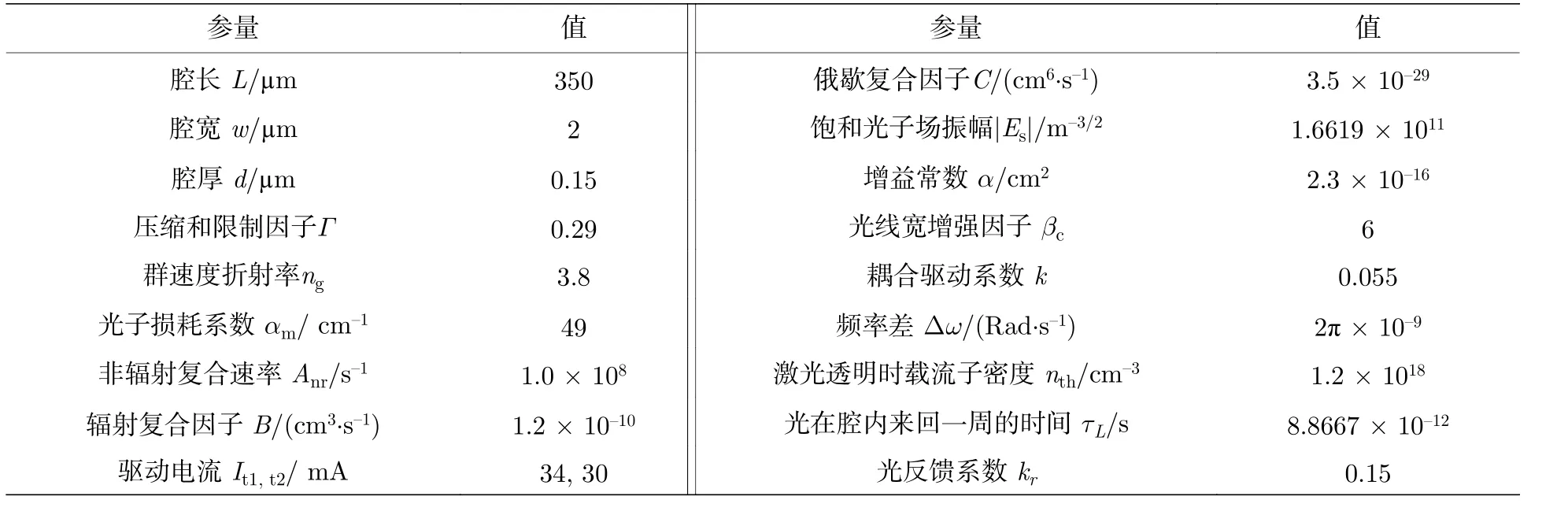
表1 激光器參量Table 1.Laser parameters.
3 理論分析
3.1 控制理論分析
取
其中腳標j代表激光器 t1, t2, r1 和 r2; 腳標0 表示激光器穩定點.并有
其中,Gj0和γej0是激光器增益和載流子非線性損耗速率在穩定點所對應的物理量.可控LAN 中的空間耦合激光器t1 和t2 的動力學穩定性方程是:

其中
并有:

(8)式的特征值ζ方程是:

3.2 可控的并行隊列同步理論分析
對于可控的LAN 結點激光器t2 和 r2 鏈路,可以獲得該鏈路隊列同步方程及相關的特征值λ的方程, 分別是:
(10)式和(11)式中
可以通過調節光反饋關聯項b11和b22中的物理參量kr以獲取(11)式的最大特征值實部具有負值的變化.當最大特征值實部有負值時, LAN 網絡結點激光器t2 和 r2 隊列可以獲得漸近穩定性同步.
對于可控的LAN 結點激光器t1 和 r1 鏈路,可以獲得該鏈路隊列同步方程及相關的特征值η方程, 分別是:
(12)式和(13)式中
其中可以通過調節光反饋關聯項c11和c22中的物理參量kr獲取(13)式的最大特征值實部具有負值的變化.當最大特征值實部具有負值時, LAN 網絡結點激光器t1 和 r1 隊列可以獲得漸近穩定性同步.
4 結果和討論
圖2 和圖3 是激光LAN 并行串聯混沌同步結果.其中, 圖2 是激光器t1與r1已呈現出相同的混沌波形變化(Er1已向上平移0.12), 圖3 是激光器t2與r2輸出相同混沌光波的結果(Er2已向上平移0.09).為了實現該激光LAN 混沌控制, 施加光電延時反饋控制, 發現可以控制激光LAN 兩鏈上各個結點隊列分別處在多種類周期狀態上, 并能取得兩個鏈路上網絡結點的類周期狀態隊列同步.在數值計算中, 對光電轉換放大與反饋參量進行歸一化處理, 形式上改寫為ρ× 112.782.
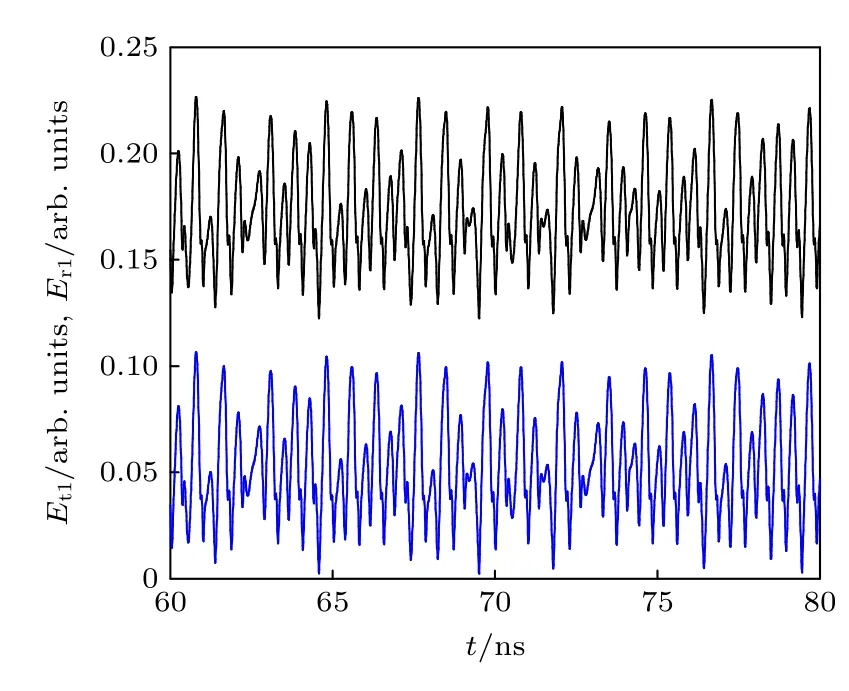
圖2 激光器t1 與r1 鏈路混沌同步Fig.2.Chaotic laser t1 synchronizes with the laser r1.
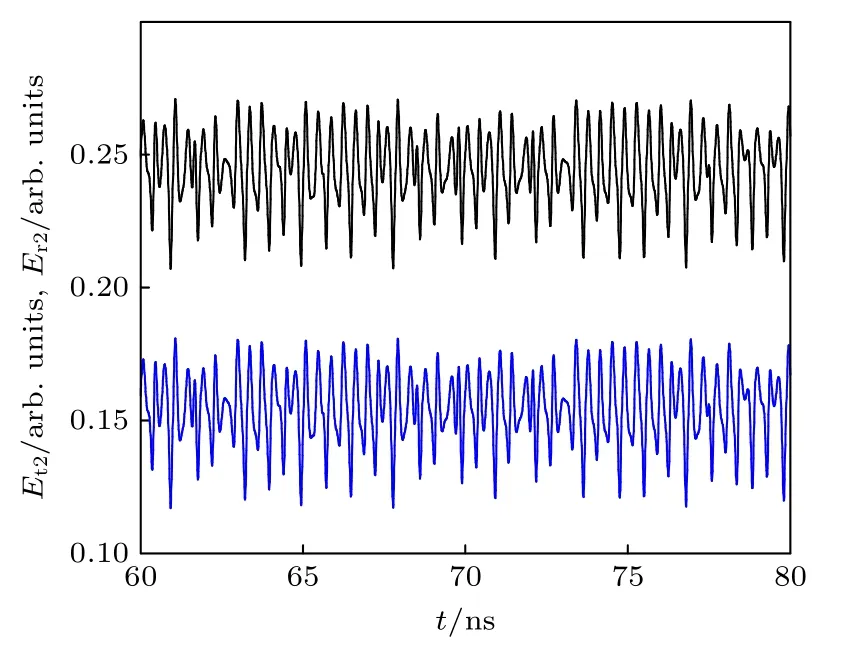
圖3 激光器t2 與r2 鏈路混沌同步Fig.3.Chaotic laser t2 synchronizes with the laser r2.
當τ= 0.2 ns,ρ= 0.01 時, 激光LAN 一個鏈路上的網絡兩結點隊列激光器t1 與r1 能夠被有效控制到9 周期態, 并能夠取得9 周期同步, 結果見圖4.其中, 兩個插圖是激光器t1 與r1 在其相空間上的9 周期軌跡變化圖, 同步用了約10 ns(其中用表示同步).圖5 是另一個鏈路上的網絡兩結點隊列激光器t2 與r2 被控制6 周期狀態并取得同步(其中用表示同步)的結果.由此可見, 激光LAN 兩鏈上網絡結點隊列可以分別被有效控制在9 周期、6 周期狀態上,且兩個鏈路的網絡結點隊列能夠分別取9 周期狀態與6 周期狀態的同步.所以我們成功地實現了激光LAN 的混沌控制與兩個鏈路的并行隊列同步.
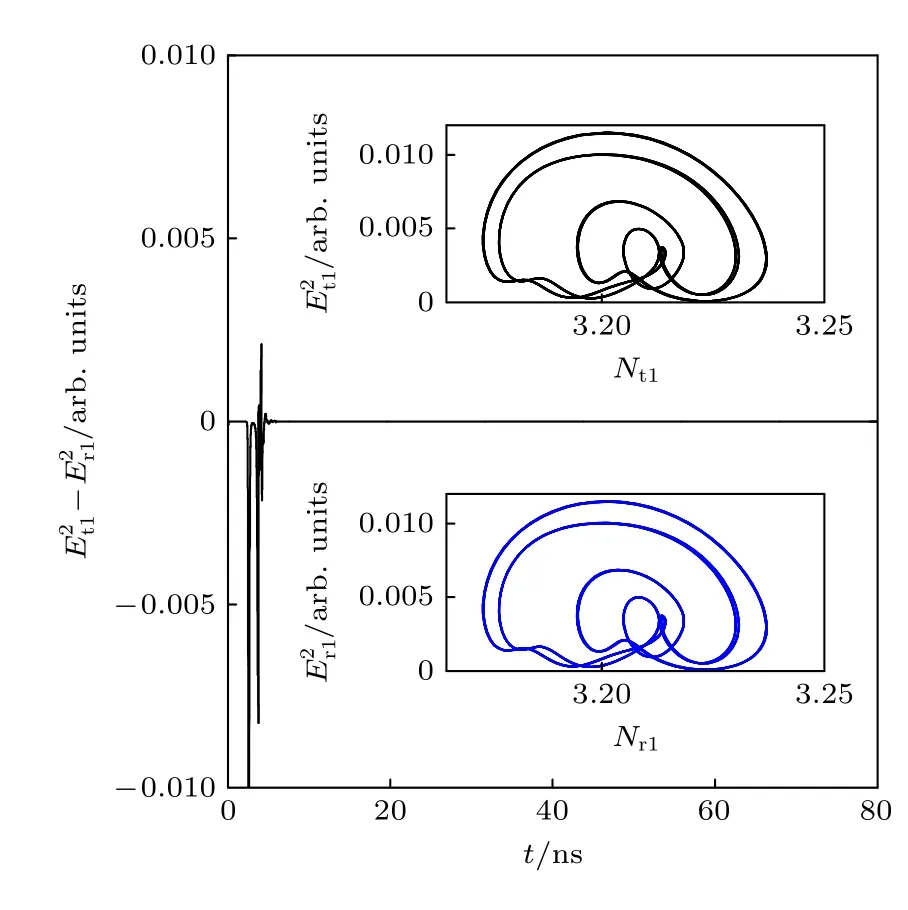
圖4 激光器t1 與r1 取得9 周期同步Fig.4.The laser t1 synchronizes with the laser r1 at a 9-periodic state.
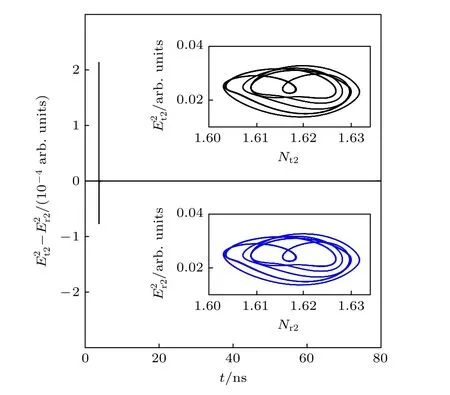
圖5 激光器t2 與r2 取得6 周期同步Fig.5.The laser t2 synchronizes with the laser r2 at a 6-periodic state.
當τ= 0.2 ns,ρ= 0.038 時, 激光LAN 一個鏈路上的網絡結點隊列激光器t1 與r1 能夠被有效控制到4 周期態上, 并能夠取得4 周期同步, 而另一個鏈路上的網絡結點激光器t2 與r2 隊列被控制3 周期狀態上, 并取得3 周期同步的結果, 即實現了激光LAN 的混沌控制與兩個鏈路隊的并行隊列的兩個不同周期同步.同時我們也注意到, 當τ= 0.2 ns 條件下,ρ取較小值時(如ρ= 0.01),網絡能夠控制到多周期態,ρ取較大值時(如ρ=0.038、ρ= 0.09 時), 網絡能夠控制到低周期態區域, 如會呈現2, 3, 4 周期.
保持τ= 0.2 ns, 當ρ= 0.04 時, 在激光LAN 的混沌控制下可以實現兩個鏈路隊并行隊列的兩個同級周期(2 周期但變化軌道不同)同步.發現一個鏈路上的網絡結點隊列激光器t1 與r1 能夠被有效控制到2 周期態上, 取得2 周期同步; 另一個鏈路上的網絡結點隊列激光器t2 與r2 被控制到另外一個2 周期狀態上, 取得該鏈路上的2 周期同步, 這兩個結果見圖6 和圖7.還進一步發現可控的兩個隊列2 周期并行同步分布區域是ρ從0.04 到0.06.
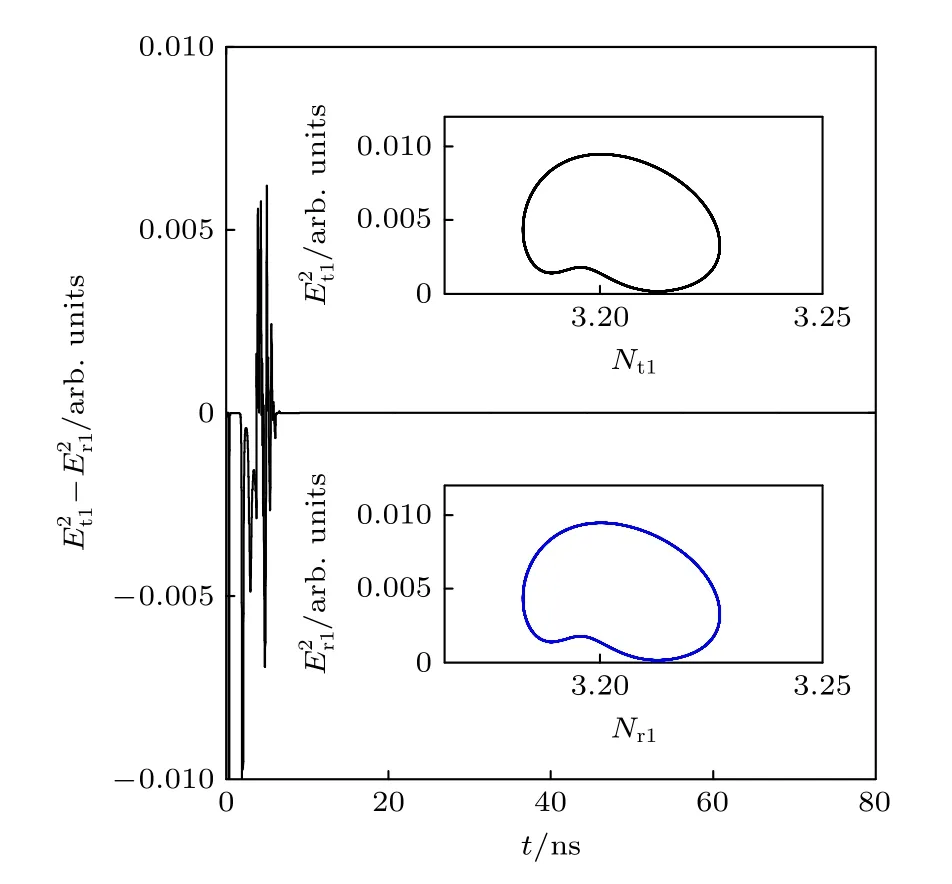
圖6 激光器t1 與r1 取得2 周期同步Fig.6.The laser t1 synchronizes with the laser r1 at a 2-periodic state.
當ρ= 0.065 時, 激光LAN 一個鏈路上的激光器t1 與r1 能夠被控制到3 周期態, 并能夠取得3 周期同步.另一個鏈路上的激光器t2 與r2 可被控制到4 周期狀態上并能取得4 周期同步.當分別有ρ= 0.07 與ρ= 0.09 時, 激光器t1 與r1 能夠取得3 周期同步; 與此同時, 激光器t2 與r2 能夠取得4 周期同步, 即LAN 兩個鏈路隊列結點的3 周期與4 周期隊列控制同步已分別實現.
當控制水平和延時時間兩參數都改變時, 當τ= 0.5 ns,ρ= 0.2 時, 可以控制實現兩個鏈路隊并行隊列的兩個同級周期(都是3 周期但變化軌道不同)同步.其中激光器t1 與r1 能夠被有效地控制到3 周期態, 并能獲得同步.而激光器t2 與r2能被有效地控制在另外一個3 周期狀態上并能取得同步.
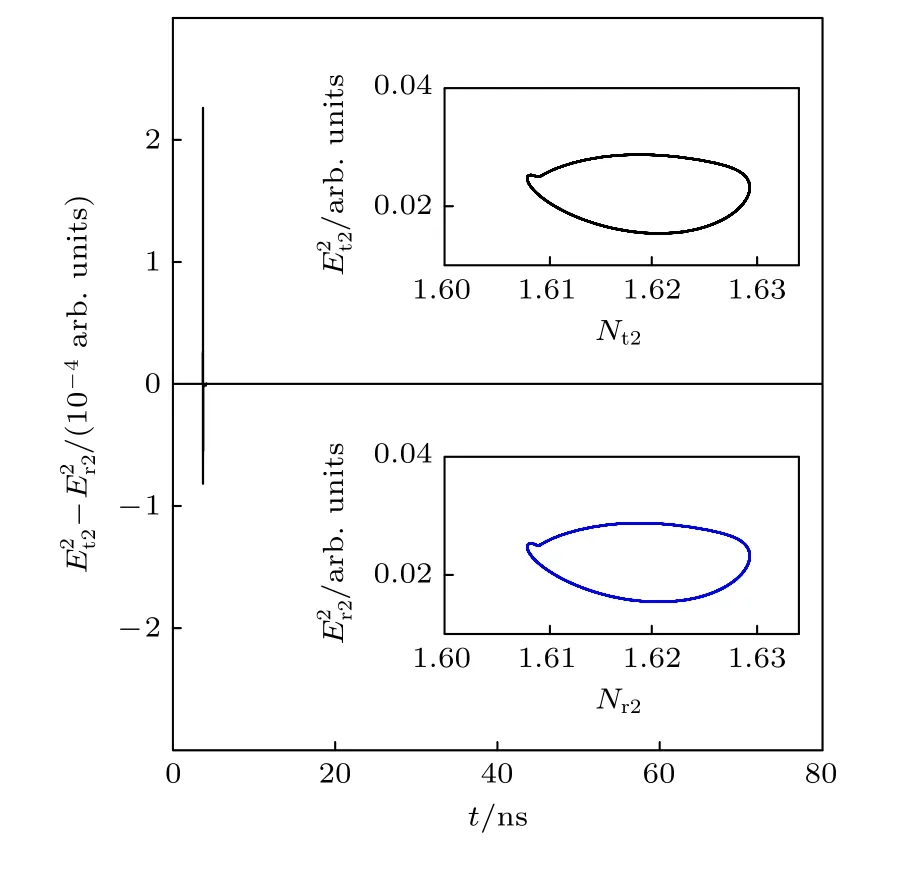
圖7 激光器t2 與r2 取得2 周期同步Fig.7.The laser t2 synchronizes with the laser r2 at another 2-periodic state.
當控制參數變為τ= 0.8 ns 和ρ= 0.06 時,圖8 顯示激光LAN 一個鏈路上的激光器t1 與r1 能夠被有效地控制到一個4 周期態上, 并取得4 周期同步.圖9 是另一個鏈路上的激光器t2 與r2 被有效地控制到另外一個4 周期狀態上并取得同步的結果.雙參數變化改變了周期軌道.當τ=1.2 ns,ρ= 0.07 時, 激光LAN 控制的結果是兩個鏈路上的各個網絡結點隊列激光器都能夠分別被控制在兩個不同的2 周期狀態上并能夠取得并行隊列同步.
我們也注意到對于長延時時間的控制條件下,取得同步的時間也要延長.如當τ= 1.6 ns,ρ=0.12 時, 圖10 顯示, 在經過約80 ns 后, LAN 一個鏈路上的激光器t1 與r1 能夠被控制到6 周期態上, 并能夠取得6 周期同步.圖11 是另一個鏈路上的激光器t2 與r2 被控制到5 周期狀態上并取得了該5 周期同步的結果.
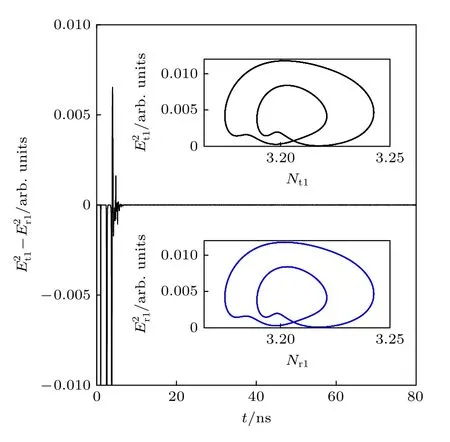
圖8 激光器t1 與r1 取得4 周期同步Fig.8.The laser t1 synchronizes with the laser r1 at a 4-periodic state.
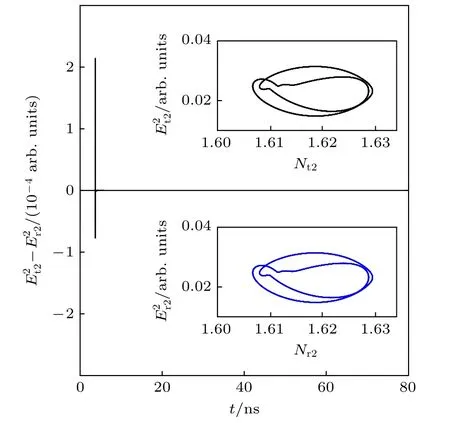
圖9 激光器t2 與r2 取得4 周期同步Fig.9.The laser t2 synchronizes with the laser r2 at another 4-periodic state.
保持τ= 1.6 ns, 對于控制參量ρ其他的取值,還會有另外一些控制結果.如當ρ= 0.14 時, 一個隊列激光器t1 與r1 能夠控制實現5 周期同步.另一個隊列激光器t2 與r2 能夠控制實現6 周期同步.如當ρ= 0.1 時, 兩個鏈路上的網絡結點激光器t1 與r1 以及t2 與r2 能夠被控制, 并能夠分別獲得3 周期、2 周期的并行隊列同步.
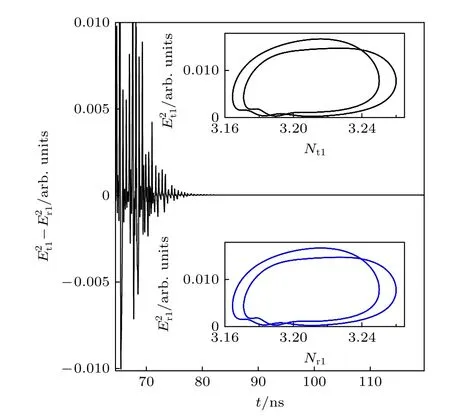
圖10 激光器t1 與r1 取得6 周期同步Fig.10.The laser t1 synchronizes with the laser r1 at a 6-periodic state.
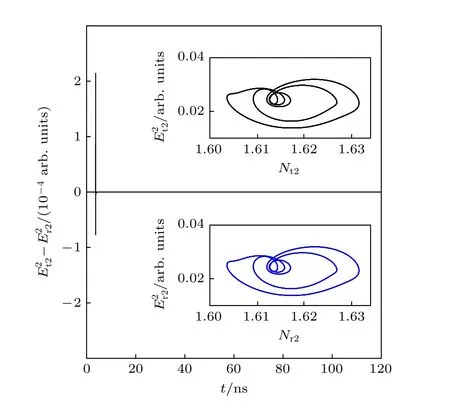
圖11 激光器t2 與r2 取得5 周期同步Fig.11.The laser t2 synchronizes with the laser r2 at a 5-periodic state.
我們還給出一個激光LAN 動態混沌控制結果.動態控制參量選取與變化特點是: 保持τ=1.6 ns 不變, 前70 ns 時取ρ= 0.14, 后70 ns 時取ρ= 0.1.控制結果是: 前70 ns, 激光器t1 與r1 能夠有效地控制到5 周期同步(變化波形相同);當70 ns 時參數ρ改變后, 激光器t1 與r1 也同時發生狀態改變, 并能夠有效地控制到3 周期同步(變化波形相同), 其中物理狀態改變時間tr大約為2.5 ns, 但整個控制過程仍然是同步的(且計算有=0), 見圖12(Er1已向上平移0.18).另一個隊列激光器t2 與r2 的動態控制結果見圖13(Er2已向上平移0.1).前70 ns, 激光器t2 與r2 能夠有效地控制到6 周期同步(變化波形相同), 當70 ns 時參數ρ改變后, 激光器t2 與r2 同時發生狀態改變并能夠有效地控制到2 周期同步(變化波形相同), 其中狀態改變時間tr大約為2.5 ns, 但整個過程也都是同步的(且計算有=0 ).
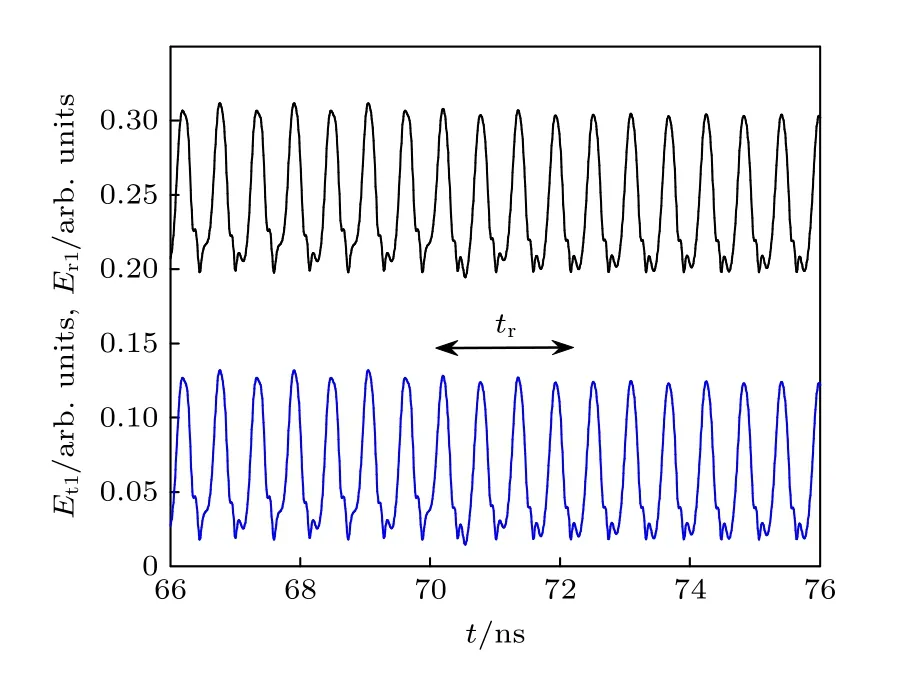
圖12 激光器t1 與r1 取得類周期動態同步Fig.12.The laser t1 synchronizes dynamically with the laser r1 in quasi-periodicity.
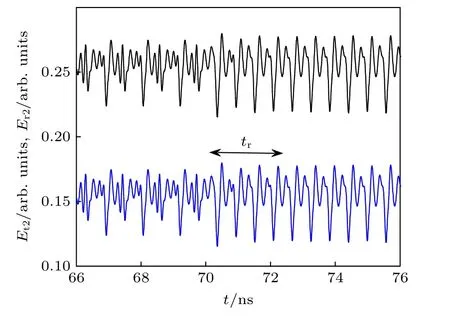
圖13 激光器t2 與r2 取得類周期動態同步Fig.13.The laser t2 synchronizes dynamically with the laser r2 in quasi-periodicity.
以上結果顯示, 在實施“單隊列-雙參數”光電延時反饋控制后, 可控的激光LAN 兩鏈路隊列各個結點是可以分別被引導在多種類周期狀態上, 并能取得兩個鏈路上網絡結點的類周期狀態并行隊列同步及動態同步.

圖14 激光器t1 超寬帶通信Fig.14.The laser t1 performs an ultra-wideband communication.
最后, 我們給出關于光電時延雙參數可調控的激光LAN“并行多點混沌載波同步發射及其在光超寬帶通信中應用”的一個實例.由于激光混沌具有幾個 GHz 帶寬, 可以進行超寬帶通信.如在τ和ρ調控下, 激光器t1 和激光器r1 可以進行兩點混沌載波同步發射與超寬帶通信.Et1和Er1可以作為超寬帶載波同步發射, 在兩個位置分別被調制向外傳送兩個信息號, 也可以進行交替發射, 或還可以設想推廣為光網絡組合聯合超寬帶通信, 這與傳統上混沌通信是由兩個同步混沌激光器實施信息的發收與解調是有區別的.其系統實施光網絡組合超寬帶通信主要是利用網絡功能, 如激光器t1 向激光器r2 發射信息, 激光器r2 與激光器t2 同步解調; 或激光器t2 向激光器r1 發射信息,激光器r1 與激光器t1 同步解調.這里僅給出激光器t1 與t2 超寬帶通信結果, 如圖14 和圖15 所示,其中取τ= 1 ns 和ρ= 0.01 調控系統到混沌態,并實現兩點混沌載波同步發射(見圖16, 兩個相同混沌吸引子軌跡相同且).圖14 是激光器t1 超寬帶通信過程, 通信速率是0.5 GHz, 信息信號振幅是0.4, 其中圖14(a)是混沌載波被信息信號調制后的載波和信號的包絡變化, 其中信號強度遠大于載波且可識別, 這是混沌超寬帶通信的基本要求.圖14(b)是從包絡上恢復出來的信息信號.圖15 通信速率是0.25 GHz, 信號振幅是0.4.這樣兩點混沌載波同步發射與超寬帶通信完成.同樣, 激光器t2 和激光器r2 也可以進行兩點混沌載波同步發射與超寬帶通信.這樣該網絡系統可以完成并行多點混沌載波同步發射與超寬帶光通信.
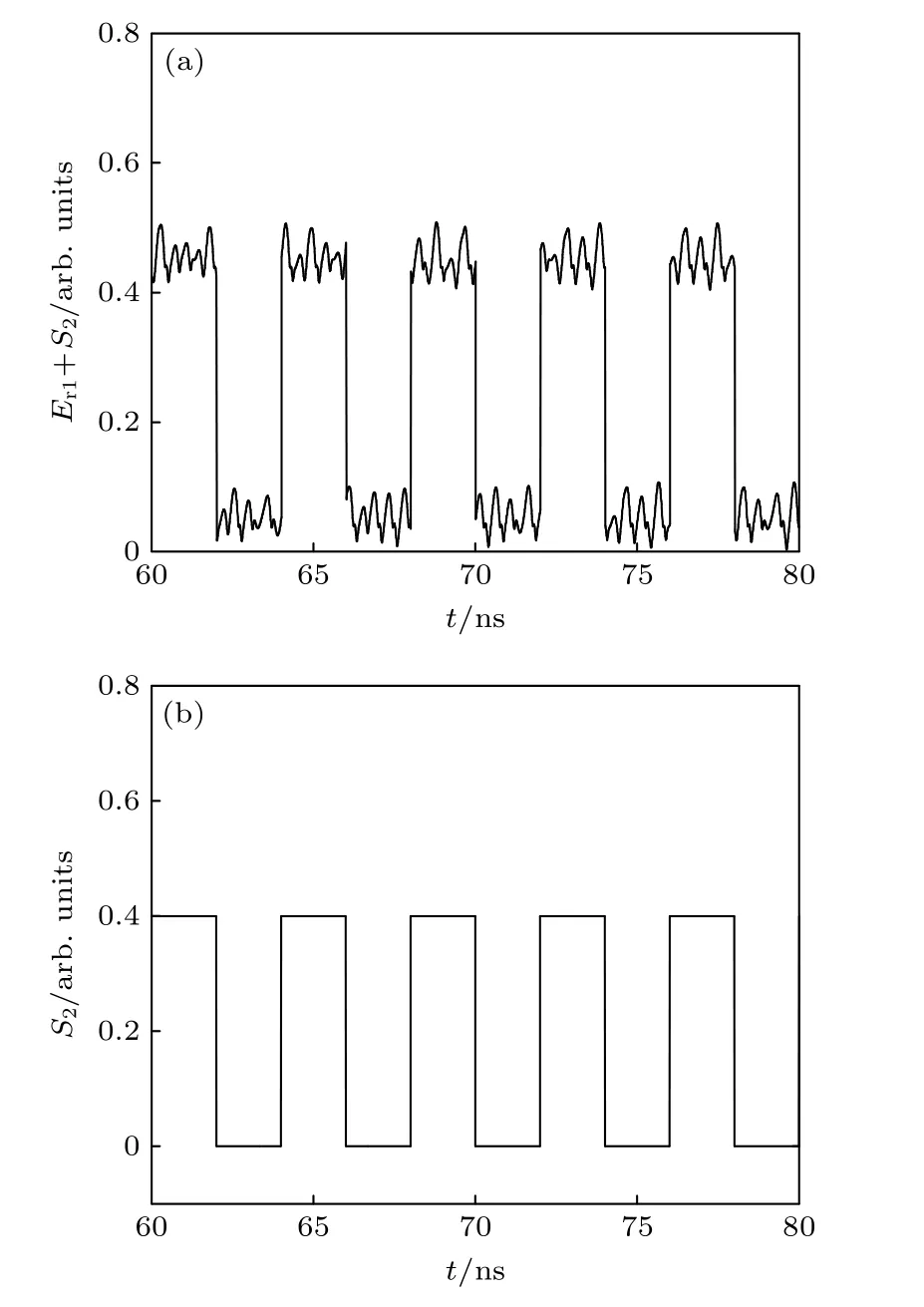
圖15 激光器r1 又一個超寬帶通信Fig.15.The laser r1 performs another ultra-wideband communication.
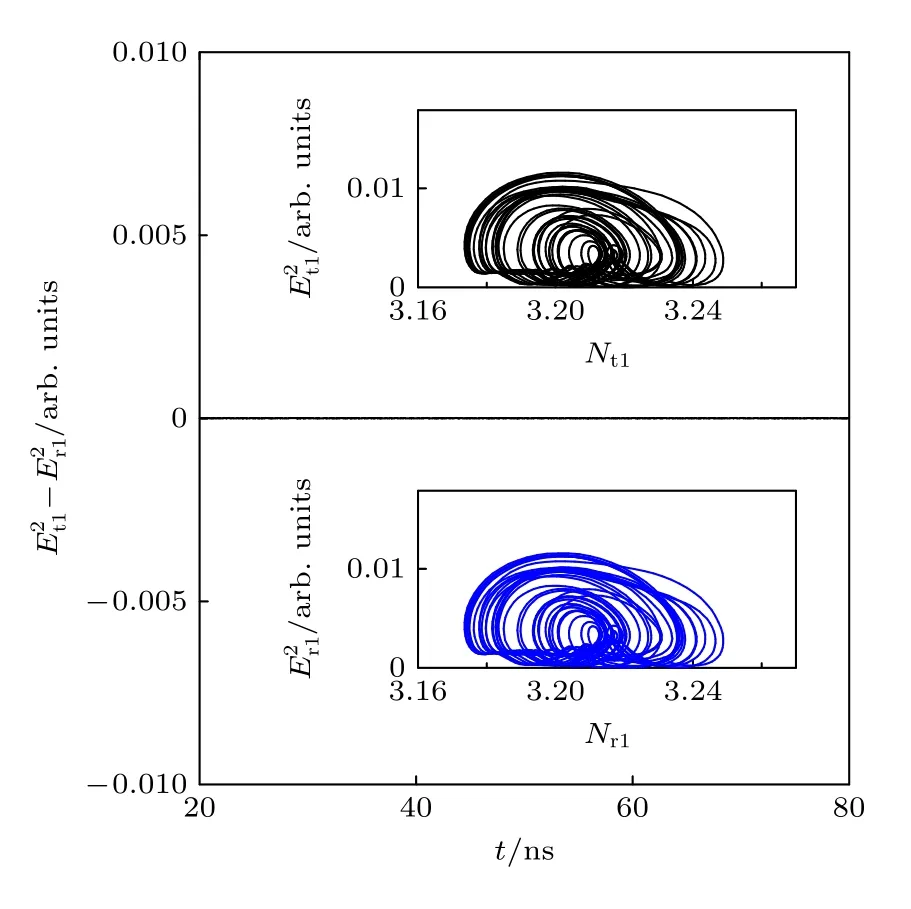
圖16 激光器t1 與r1 取得混沌同步發射Fig.16.The lasers t1 and r1 emit synchronously two same chaotic carriers.
5 結 論
本文成功研究并實現了激光局域網絡的混沌控制與并行隊列同步.具體提出“單隊列-雙參數”光電延時反饋控制激光LAN 系統及可控的“交叉驅動-反饋”并行隊列同步網絡的數理模型.通過超越方程理論預言了該LAN 是可以實現混沌控制的, 通過并行隊列同步方程理論證明了并行串聯隊列同步是可以獲得的.數值結果和理論分析取得了完美統一.發現在兩個并行串聯隊列光路上, 可分別實現網絡各結點的混沌控制并能夠實現類周期的網絡結點的并行隊列同步, 實現了2 周期、3 周期、4 周期等狀態的并行隊列同步及其他多個類周期網絡結點的激光并行隊列同步及動態同步, 發現了2 個類周期等并行隊列同步控制區域.最后給出兩點混沌載波同步發射與光超寬帶通信的實例, 闡述了交替發射、網絡組合聯合超寬帶通信的設想等.簡言之, 本激光LAN 特點是異系統耦合雙中心生成串聯并行隊列網絡, “交叉驅動-反饋”基本網絡結構實現并行隊列同步, “單隊列-雙參數”控制實現網絡全部結點激光器物理狀態的“兩態”控制, 具有光網絡聯合超寬帶通信功能等.這種新型的激光LAN 混沌控制系統, 具有局域光網絡光傳送與光聯接核心控制技術要素, 具有復雜動力學網絡系統的多變量、多空間維度以及并行兩路不同隊列混沌控制技術特點.研究結果對局域網絡、光網絡的控制與同步、激光技術以及混沌的研究具有重要的參考價值.
