基于Wi-Fi信號的室內人員定位追蹤系統設計與實現
2021-05-07 09:12:09曾光丁宇凌黃健盛黃楊靈
現代信息科技 2021年23期
關鍵詞:卡爾曼濾波
曾光 丁宇凌 黃健盛 黃楊靈
摘? 要:文章提出一種WKNN優化算法,設計與實現了基于Wi-Fi信號的室內人員定位追蹤系統。針對傳統WKNN算法中利用加權平均計算權重不穩定,存在一定誤差的問題,引入可以不斷遞歸處理數據的卡爾曼濾波,獲取加權系數的最優估計值,以此提高室內定位精度,并在此基礎上設計與實現了基于Wi-Fi信號的室內定位軟硬件系統。測試結果表明,改進后的算法在特定環境中的定位誤差可控制在1.2米以內,提高了基于Wi-Fi信號的室內定位的精度與穩定性,達到了預期效果。
關鍵詞:室內定位;Wi-Fi;WKNN;卡爾曼濾波
中圖分類號: TP311;TN929.5 ? ? ? ? ? ? ?文獻標識碼:A文章編號:2096-4706(2021)23-0001-05
Design and Implementation of Indoor Personnel Positioning and Tracking System Based on Wi-Fi Signal
ZENG Guang, DING Yuling, HUANG Jiansheng, HUANG Yangling
(Guangdong Communication Polytechnic, Guangzhou? 510650, China)
Abstract: In this paper, a WKNN optimization algorithm is proposed, and an indoor personnel positioning and tracking system based on Wi-Fi signal is designed and implemented. Aiming at the problem that the weight calculated by weighted average in the traditional WKNN algorithm is unstable and there are some errors, the Kalman filter which can continuously recursively process the data is introduced to obtain the optimal estimation value of the weighting coefficient, so as to improve the indoor positioning accuracy. On this basis, the indoor positioning software and hardware system based on Wi-Fi signal is designed and implemented. The test results show that the positioning error of the improved algorithm in a specific environment can be controlled within 1.2 m, which improves the accuracy and stability of indoor positioning based on Wi-Fi signal and achieves the expected effect.
Keywords: indoor positioning; Wi-Fi; WKNN; Kalman filter
0? 引? 言
按照應用場景的不同,空間定位技術可以分為室內定位和室外定位。其中,室外定位(如GPS、伽利略、北斗衛星導航等)在近幾年得到迅速發展,基本可以滿足不同行業和領域的定位需求[1]。相比之下,受室內結構與布局的復雜的影響,并且室外定位常用的衛星信號在室內復雜環境下衰減嚴重,定位精度銳減,導致室外定位技術無法有效應用于室內,從而使得被稱為位置服務“最后一公里”的室內定位技術發展滯緩[2]。
然而,在安全施工、災害預防、救援指引、室內導航等領域,通常面對的是復雜的未知環境,尤其是在室外定位技術效果受限的封閉或半封閉場景(比如隧道、礦井、倉庫、地下停車場等)中,良好的室內定位技術將能幫助人們很好地掌握室內境況,對相關的救援或指引具有極其重要的作用。
本文在對比各種室內定位技術的基礎上,選擇獨具優勢的Wi-Fi技術,針對當前Wi-Fi室內定位技術存在定位精度與穩定性不高的問題,通過基于RSSI的位置指紋算法,利用卡爾曼濾波優化其中的WKNN算法,并通過設計軟硬件系統進行應用實驗,驗證了本文算法的實用性和有效性。
1? 室內定位技術
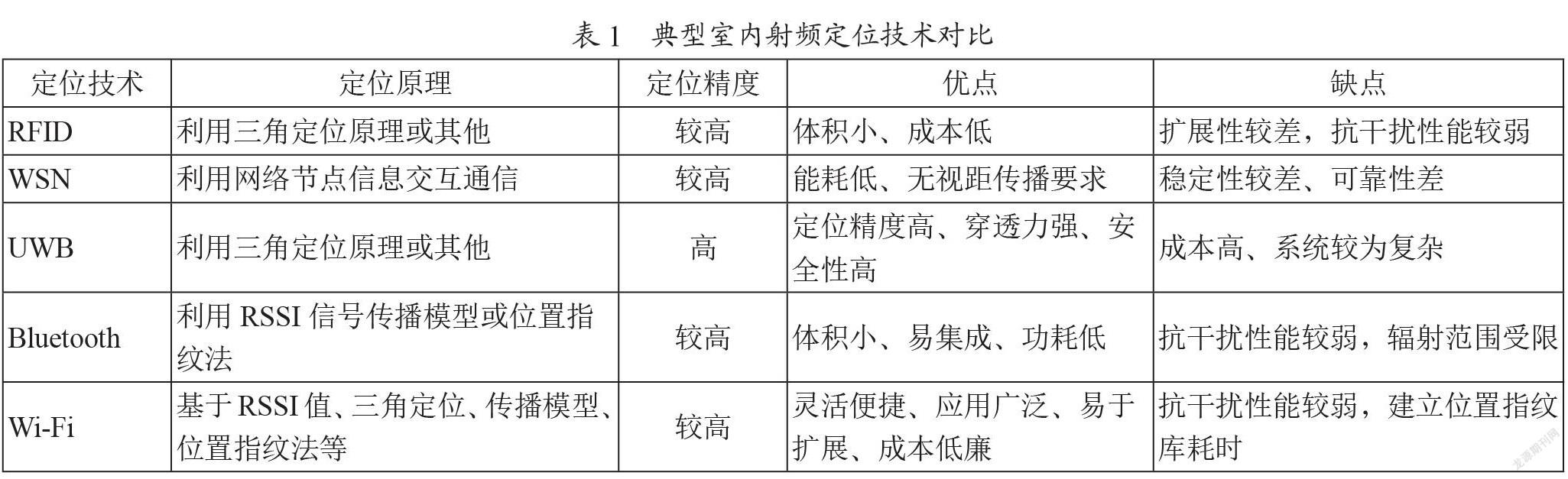
當前室內定位的主流技術包括視覺和射頻兩個方向:視覺方向主要是利用攝像頭,結合圖像處理算法對室內物體進行定位判斷,這對攝像頭視角、圖像處理效率以及存儲容量均有較高的要求[3];射頻方向是當前探索領域應用最廣的技術,主要包括無線射頻識別(RFID)、無線傳感器網絡(WSN)、超寬帶(UWB)、藍牙(Bluetooth)以及Wi-Fi技術[4]。相較于其他幾種射頻技術,Wi-Fi技術具有移動靈活、成本低廉、應用廣泛、擴展及鋪設便捷等優勢,是當前最具發展前景的室內定位技術之一[5]。幾種典型室內射頻定位技術的比較如表1所示。
基于Wi-Fi的室內定位技術所面臨的主要挑戰之一是,復雜環境的變化會帶來信號強度的動態變化,進而導致建立位置指紋庫耗時、定位精度不穩定等問題[6]。本文基于上述問題,選取基于RSSI的Wi-Fi室內定位技術,通過增設Wi-Fi節點以及優化WKNN位置指紋定位算法,來提高室內目標定位的精度與穩定性,并依此建立實物演示系統,驗證了本文方法的有效性。
2? 室內定位算法
2.1? 基于RSSI的位置指紋算法
基于接收信號強度指示(Received Signal Strength Indication, RSSI)的位置指紋算法,是通過在室內布控硬件設備(本文稱為“參考節點”),然后測量室內移動物體(本文稱為“移動節點”)與參考節點之間的信號強度,據此綜合估算移動節點的相對位置[7]。由于參考節點的具體位置坐標信息是已知的,相較于其他基于模型傳播的算法,已知確定的環境參數,能帶來較高的確定性,進而能夠獲得較高的定位精度。
常見基于RSSI的位置指紋算法主要有信號空間最近鄰法(NNSS)、K最近鄰法(KNN)、加權K近鄰法(WKNN)以及概率匹配算法等[8],這些算法的對比如表2所示。
綜上,相較于其他算法,WKNN算法具有硬件配置要求簡單、算法計算邏輯簡單、定位精度較高、穩定性較強等優勢,因此,本文選擇WKNN作為實現室內定位的位置指紋匹配算法。
WKNN算法是在KNN的基礎之上引入權重的概念,依此提升定位精度及定位穩定性。由于Wi-Fi信號受環境因素干擾較大,移動節點在不同位置時,電磁波的信號強度會發生不同的變化,這可能跟初始限定環境中測量的與參考節點之間的信號強度有較大的波動。基于此,WKNN引入權重的概念,按照一定規則為鄰近的不同參考節點賦予不同的權重,距離某參考節點越近,被賦予的權重越高,進而可提升移動節點的定位精度及定位穩定性[9,10]。假設移動節點周圍最鄰近的參考節點個數為K,在用WKNN算法對移動節點進行坐標定位時,可以通過式(1)獲得。
(1)
其中,(X,Y)表示移動節點的位置坐標;ε是為了避免權重ωi等于0而設定的一個非零實數,一般通過具體環境試驗對比后獲得;ωi則表示離移動節點第i個最鄰近參考節點的權重,通過式(2)計算權重。
(2)
其中,di表示第i個參考節點位置坐標與移動節點實際位置坐標之間的距離。
2.2? WKNN算法的優化
相較于KNN,WKNN的突出特點是引入了權重的概念,提高了移動節點位置坐標的估算精度,但是傳統的WKNN算法中,權重計算大多是通過對最鄰近K個參考節點進行加權平均,得出移動節點位置坐標的估算結果,然后與數據庫中的位置范圍進行匹配,最終得出估算的移動節點位置坐標。在這個過程中,不可避免地會受到實際環境因素的影響,造成一定的誤差,帶來定位精度的不穩定。
本文針對加權平均算法計算不穩定,存在一定誤差的問題,引入可以不斷遞歸處理數據的卡爾曼濾波,獲取加權系數的最優估計值,進而提高移動節點的室內定位精度,具體的算法流程如圖1所示。
3? 系統設計與實現
基于Wi-Fi信號的室內人員定位追蹤系統由上位機軟件和節點硬件設備兩部分組成,其中上位機軟件用于實時顯示定位信息,實現系統管理功能,如系統參數設置、Wi-Fi網絡設置、靜態地圖導入、節點坐標調整等;布控在室內的節點硬件設備用于實時獲取定位信息,主要包括含Wi-Fi模塊的定位參考節點/移動節點,也可以由現有帶RSSI功能管理的路由器代替參考節點。本系統的整體框架如圖2所示。
3.1? 上位機軟件實現
室內定位信息的顯示主要通過上位機軟件實現。首先,接收室內定位區域移動節點傳送來的Wi-Fi信號強度數據,對信號數據進行降噪處理;其次,將經過降噪處理的數據代入改進后的定位算法,獲得移動節點的具體位置坐標;最后,將計算結果實時顯示在PC端靜態地圖中,代表用戶具體位置的移動節點亮紅燈顯示,預先布設在室內固定位置的參考節點亮藍燈顯示。移動節點的位置坐標刷新以秒為單位,可以自行設置刷新時間。具體的流程圖如圖3所示。
上位機軟件啟動后的主界面菜單欄包含導入地圖、啟動聯網、開始定位、坐標調整、數據記錄、停止記錄等功能鍵,并帶有實時顯示具體移動標簽號、實時定位位置以及刷新時間的位置信息實時顯示窗口,具體如圖4所示。
其中菜單欄中的導入地圖,可以選擇PC端的本地地圖(JPG、PNG等圖片格式均可);啟動聯網用于建立上位機軟件與移動節點之間的關聯,需要注意的是,PC端的Wi-Fi與室內Wi-Fi移動節點或被追蹤人手機終端連接的應該是同一頻段內的Wi-Fi信號;在參數和坐標等均設定完或匹配好之后,即可點擊“開始定位”,左上角信息框會顯示具體的實時位置信息;由于起始階段參考節點位置與所導入地圖的比例尺不一致,需要通過點擊“坐標調整”來調整參考節點的位置,使得軟件顯示的參考節點位置與實際環境中鋪設的參考節點位置大體一致;點擊“數據記錄”會將對應的位置信息、信號強度、測距信息等以文檔的形式持續保存在本地PC端,點擊“數據記錄”后,會跳出保存路徑選擇,用戶可自主選擇保存路徑,確定保存路徑后,“數據記錄”按鍵會變暗,而“停止記錄”按鍵會亮顯,待用戶點擊“停止記錄”后,即停止記錄并保存記錄,同時“數據記錄”按鍵亮顯。
3.2? 節點硬件設備實現
節點硬件設備包括參考節點和移動節點,兩者功能一致,所以采用的是同一套硬件方案,即采用TI公司CC3200型號的Wi-Fi模塊,搭建外圍電路,實現基于RSSI的低功耗室內定位,電路圖如圖5所示。
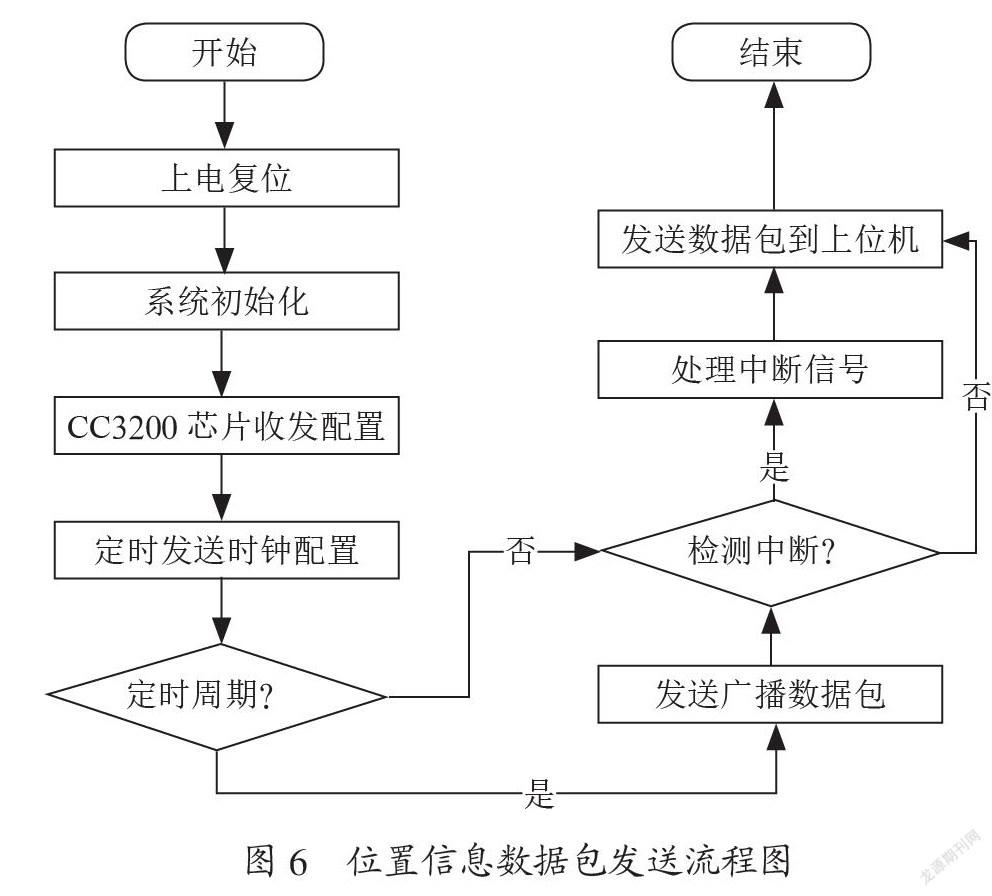
節點硬件設備與上位機軟件的交互,通過同一頻段的Wi-Fi信號發送廣播,測試網絡是否中斷,若沒有中斷,則表示網絡正常,將底層數據包發送給上位機軟件進行處理,對應的數據發送流程圖如圖6所示。
4? 系統測試結果展示
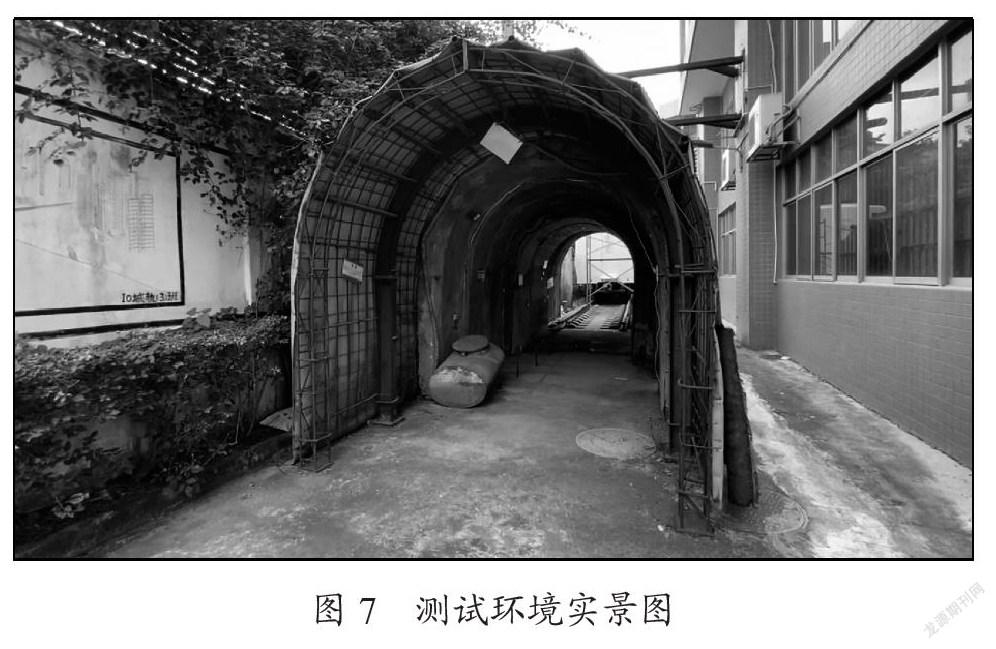
系統測試環境選擇校園一條半封閉的隧道內,實景如圖7所示。為便于收集數據,用嵌入移動節點帶攝像頭的遙控智能小車模擬隧道內的移動物體,實物如圖8所示。PC端上位機軟件實時顯示定位信息,如圖9所示,其中藍色圓點表示固定不變的參考節點位置,紅色圓點則是智能小車移動過程中的實時位置顯示。
在具體的測試中,首先固定4個參考節點的位置,然后根據參考節點人工標記6個已知坐標的點,接著控制智能小車到達標記位置,最后將從PC端獲取的定位數據與人工實測數據進行對比,以此檢驗定位精度的提升效果。具體標記位置如圖10所示,實驗數據如表3所示。
由上述實驗測試數據分析可知,本文方法在上述隧道空曠環境中的定位誤差均保持在1.2米以內,達到某些應用場景的定位精度要求,并具有較強的穩定性,這也充分說明本方法在室內定位中的可行性和有效性,基本達到預期效果。另外,需要說明的是,室內硬件設備的布局會影響Wi-Fi收發信號強度,進而影響實時定位算法的效果。本試驗的結果是根據實際環境,經過多次測試調整參數,獲得與實際環境相匹配的最優布局的結果。
5? 結? 論
本文在室內人員定位追蹤系統的具體應用實踐探索中,通過對現有室內定位技術的分析比較,選擇應用前景廣闊的Wi-Fi室內定位技術,在比較多種基于RSSI的位置指紋算法后,選取其中的WKNN算法,引入卡爾曼濾波對其進行優化,設計并實現了室內定位的軟硬件系統。選取特定場景進行測試,測試結果表明本文方法可提升定位精度與定位穩定性,為基于Wi-Fi的室內定位的應用與研究提供了參考思路。但綜合來看,本文方法仍存在較大的局限性,欠缺各種復雜場景下的研究與測試,此場景下的定位效果仍有待進一步的改進與優化。
參考文獻:
[1] 徐軍,李群群,王曰輝,等.室內移動目標定位系統設計 [J].電子技術應用,2018,44(12):44-46+50.
[2] SOU S L,LIN W H,LAN K C,et al. Indoor Location Learning Over Wireless Fingerprinting System With Particle Markov Chain Model [J].IEEE Access,2019,7:8713-8725.
[3] GAO C Q,ZHANG Y Z,WANG X Z,et al. Semi-direct RGB-D SLAM algorithm for dynamic indoor environments [J].ROBOT,2019,41(3):372-383.
[4] 李兵兵.基于WiFi位置指紋的室內定位算法研究 [D].保定:河北大學,2020.
[5] 朱正偉,蔣威,張貴玲,等.基于RSSI的室內WiFi定位算法 [J].計算機工程與設計,2020,41(10):2958-2962.
[6] 余成波,成科宏.WiFi與行人航跡推算自適應無跡卡爾曼濾波融合定位算法 [J].科學技術與工程,2020,20(27):11155-11160.
[7] 米偉娟.基于WiFi的室內定位系統的設計與實現 [D].石家莊:河北科技大學,2019.
[8] 李夢夢.基于機器學習的WiFi室內定位技術研究 [D].西安:西安科技大學,2020.
[9] 徐錦修,仲臣,韓雨辰,等.改進的WKNN算法研究 [J].科技創新與應用,2021,11(19):19-21+25.
[10] 王修駒,姚善化.基于改進WKNN的室內定位算法 [J].齊齊哈爾大學學報(自然科學版),2021,37(3):12-16+21.
作者簡介:曾光(1990—),男,漢族,廣東河源人,講師,工程師,碩士研究生,研究方向:電子信息、機器視覺;丁宇凌(2001—),女,漢族,廣東潮州人,研究方向:通信信號技術;黃健盛(2002—),男,漢族,廣東汕頭人,研究方向:通信信號技術;黃楊靈(2001—),男,漢族,廣東茂名人,研究方向:通信信號技術。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36