基于WRLS-YOLOv4的大型工程機械檢測
2021-05-07 02:24:26余長生秦倫明王悉陳鵬
現(xiàn)代信息科技 2021年23期
余長生 秦倫明 王悉 陳鵬


摘? 要:為解決大型工程機械不規(guī)范施工導致輸電線路出現(xiàn)故障的問題,提出一種改進YOLOv4的大型工程機械設備檢測方法。當前YOLOv4算法存在識別準確率低、漏檢率高的缺點,文章借鑒熱重啟機制思想,設置學習率按余弦函數(shù)周期性衰減來減小loss值,提高識別準確率。引入標簽平滑對正負樣本的標簽值進行微調(diào)整,避免網(wǎng)絡過擬合,降低漏檢率。實驗結(jié)果表明,改進后的WRLS-YOLOv4算法識別大型工程機械較Faster-RCNN、SSD、YOLOv3、YOLOv4效果更好,能夠為輸電線路進行工程機械監(jiān)測提供參考依據(jù)。
關(guān)鍵詞:輸電線路;目標檢測;深度學習;YOLOv4
中圖分類號:TP391? ? ? ? ?文獻標識碼: A文章編號:2096-4706(2021)23-0159-04
Detection of Large Construction Machinery Based on WRLS-YOLOv4
YU Changsheng1, QIN Lunming1, WANG Xi2, CHEN Peng1
(1.College of Electronics and Information Engineering, Shanghai University of Electric Power, Shanghai? 200090, China; 2.School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing? 100044, China)
Abstract: In order to solve the problem of transmission line failure caused by non-standard construction of large construction machinery, a detection method for large construction machinery and equipment based on improved YOLOv4 is proposed. The current YOLOv4 algorithm has the disadvantages of low recognition accuracy and high missed detection rate. This paper draws on the idea of hot restart mechanism and set the learning rate to decrease the loss value by periodically decaying the cosine function, improve the recognition accuracy. The label smoothing is introduced to fine-tune the label values of positive and negative samples to avoid network overfitting and reduce the missed detection rate. The experimental results show that the improved WRLS-YOLOv4 algorithm recognizes large construction machinery better than Faster-RCNN, SSD, YOLOv3 and YOLOv4, and can provide a reference basis for construction machinery monitoring on transmission lines
Keywords: transmission line; object detection; deep learning; YOLOv4
0? 引? 言
輸電線路作為電力網(wǎng)絡中的一環(huán),承擔著傳輸電能的角色,其安全穩(wěn)定的運行是電力系統(tǒng)的重要保障。據(jù)統(tǒng)計,在外力破壞造成的輸電線路跳閘事故中,有超過70%是由于大型施工機械特別是塔吊,挖掘機,吊車等在施工過程中碰線而引起的[1]。因此,對輸電線路周圍環(huán)境進行大型工程機械監(jiān)測是十分有必要的。
目前,在大型施工機械檢測的研究上,存在識別準確率低,漏檢率高的情況。為解決上述問題,本文提出一種WRLS-YOLOv4(Warm Restart & Label Smoothing-YOLOv4)的大型施工機械檢測算法。最后以5種典型的工程機械為例,構(gòu)建圖像數(shù)據(jù)集,通過多組實驗對模型進行訓練、驗證以及測試,結(jié)果表明,本文算法較原YOLOv4算法mAP提高了5.43%,平均漏檢率降低了0.11。
1? 算法原理
1.1? YOLOv4算法原理
YOLOv4算法在YOLOv3的基礎(chǔ)上,使用了多種優(yōu)化策略,在精度和檢測速度上均有較大的提升。YOLOv4采用了CSPDarknet53代替YOLOv3的Darknet53作為主干特征提取網(wǎng)絡,該網(wǎng)絡的卷積模塊使用Mish激活函數(shù),其表達式為:
Mish=x×tan[ln(1+ex)]? ? (1)
為了解決圖像由于裁剪和拉伸而失真的問題,YOLOv4還引入了SPP結(jié)構(gòu)和PANet結(jié)構(gòu)。
1.2? 熱重啟機制
Loshchilov等[2]提出了基于熱重啟機制的梯度下降算法SGDR,在每個訓練周期開始時,將學習率調(diào)整為初始學習率,在下一個周期開始前,學習率逐漸減小,到達下一個訓練周期時,學習率重置為初始學習率。研究結(jié)果表明,學習率熱重啟策略雖然在短期內(nèi)loss值會增大,但在最終的訓練結(jié)果上,比傳統(tǒng)的學習率逐代衰減策略更好,可以使模型逃離局部最優(yōu),加快模型的收斂速度,最終提高模型的識別準確率。
1.3? 獨熱編碼
對于多分類問題,通常采用one-hot編碼[3]的方式對樣本所屬類別給定一個標簽概率值(0或1),例如在一個人、貓和狗的三分類任務中,一個樣本的one-hot編碼為x=[0,0,1],樣本經(jīng)過網(wǎng)絡最后一層的輸出為x=[2,3,5],經(jīng)softmax歸一化[4]后的預測結(jié)果為y=[0.042,0.114,0.844],公式為:
(2)
模型會更加關(guān)注softmax預測結(jié)果中接近1的概率值,讓0.844越來越接近1。
2? WRLS-YOLOv4算法
2.1? 余弦退火衰減學習率
本文借鑒熱重啟機制的思想,在模型學習過程中,隨著時間的推移讓學習率動態(tài)變化。讓學習率在每個周期先從初始學習率線性增加至最大學習率,再以余弦函數(shù)的方式衰減至最小學習率,以此為一個周期,下一個周期開始時,學習率重置為初始學習率。在學習率衰減過程中,網(wǎng)絡向局部最優(yōu)點靠攏,在學習率增大時,網(wǎng)絡又跳出該局部最優(yōu)點,向著下一個最優(yōu)點靠近,如此循環(huán)往復,有助于模型的收斂,可以減小loss值,提高算法的識別準確率。
余弦退火衰減學習率的衰減函數(shù)為:
(3)
其中ηt表示t時刻的學習率,ηmax為最大學習率,本文設為0.001,ηmin為最小學習率,本文設置為0,Tcur是上一次學習率衰減至當前時刻已迭代的次數(shù),Ti為兩次學習率衰減t之間相差的迭代次數(shù),本文設為20。
2.2? 標簽平滑策略
本文引入標簽平滑來調(diào)整樣本的標簽值,調(diào)整公式為:
(4)
式中qi和qi′分別為第i個樣本調(diào)整前和調(diào)整后的標簽值,K為類別總數(shù),ε是一個較小的超參數(shù),本文設為0.05,用以對分類準確性進行微調(diào),緩解one-hot編碼導致的過擬合問題。適當?shù)卣{(diào)整正負樣本的標簽值,可以防止模型過于關(guān)注正樣本的預測值,減小正負樣本的輸出值差值,從而提高模型的泛化能力和魯棒性,減小漏檢率。
3? 數(shù)據(jù)集與實驗
3.1? 實驗數(shù)據(jù)集
本文的數(shù)據(jù)集一共14 785張圖片,均拍攝于實際施工現(xiàn)場,圖中包含塔吊、吊車、挖掘機、鏟車和水泥泵車共5類大型工程機械。對上述工程機械圖像,運用Labellmg來標注圖像中每種工程機械的真實框并生成xml文件,將圖片及對應的標注信息制作成標準的VOC2007數(shù)據(jù)集格式。
3.2? 實驗環(huán)境與訓練策略
本文所使用電腦操作系統(tǒng)為Windows10,使用GPU顯卡為NVIDA GRID P40,顯存11 GB。本文所使用的軟件環(huán)境為CUDA10.0,CUDNN7.4.1以及Tenserflow-gpu1.13.1。
在訓練之前,劃分10%的數(shù)據(jù)集用于測試,90%用于訓練。在訓練過程中,再把用于訓練部分的數(shù)據(jù)集劃分10%用于驗證。由于訓練過程需要耗費大量時間,本文通過粗略訓練和精細訓練的方式進行訓練,均采用提前終止機制[5]防止訓練結(jié)果過擬合。
3.3? 評價標準
本文使用平均精度AP、平均精度均值mAP、平均漏檢率mMR以及每秒幀數(shù)FPS來對各個算法訓練的模型進行評價。
AP值是指精準率和召回率曲線下的面積,精準率和召回率的公式如下:
(5)
(6)
其中,TP是分類器認為正樣本,實際也是正樣本的例子,F(xiàn)P是被分類器認為是正樣本,實際上是負樣本的例子,F(xiàn)N表示分類器認為是負樣本,實際上是正樣本的例子。由不同的精準率和召回率的點的組合可繪出P-R曲線,AP即是該曲線下的面積。mAP則是把所有類別的AP計算出來然后根據(jù)式(7)求平均值。
(7)
其中K為類別總數(shù)。
MR是單一類別的漏檢率,mMR即為所有類別漏檢率的平均值,單一類別的漏檢率計算公式為:
(8)
式中,xi為第i張圖片的漏檢率,M為某一類圖像的總數(shù),mMR值越小,模型性能越好。
FPS是指每秒內(nèi)處理圖片的數(shù)量,可以反映模型的檢測速度能否達到實時檢測的要求。FPS值受設備性能影響,本文均在同一設備下對各個模型的FPS進行對比分析。
4? 實驗結(jié)果與分析
4.1? 余弦退火衰減實驗
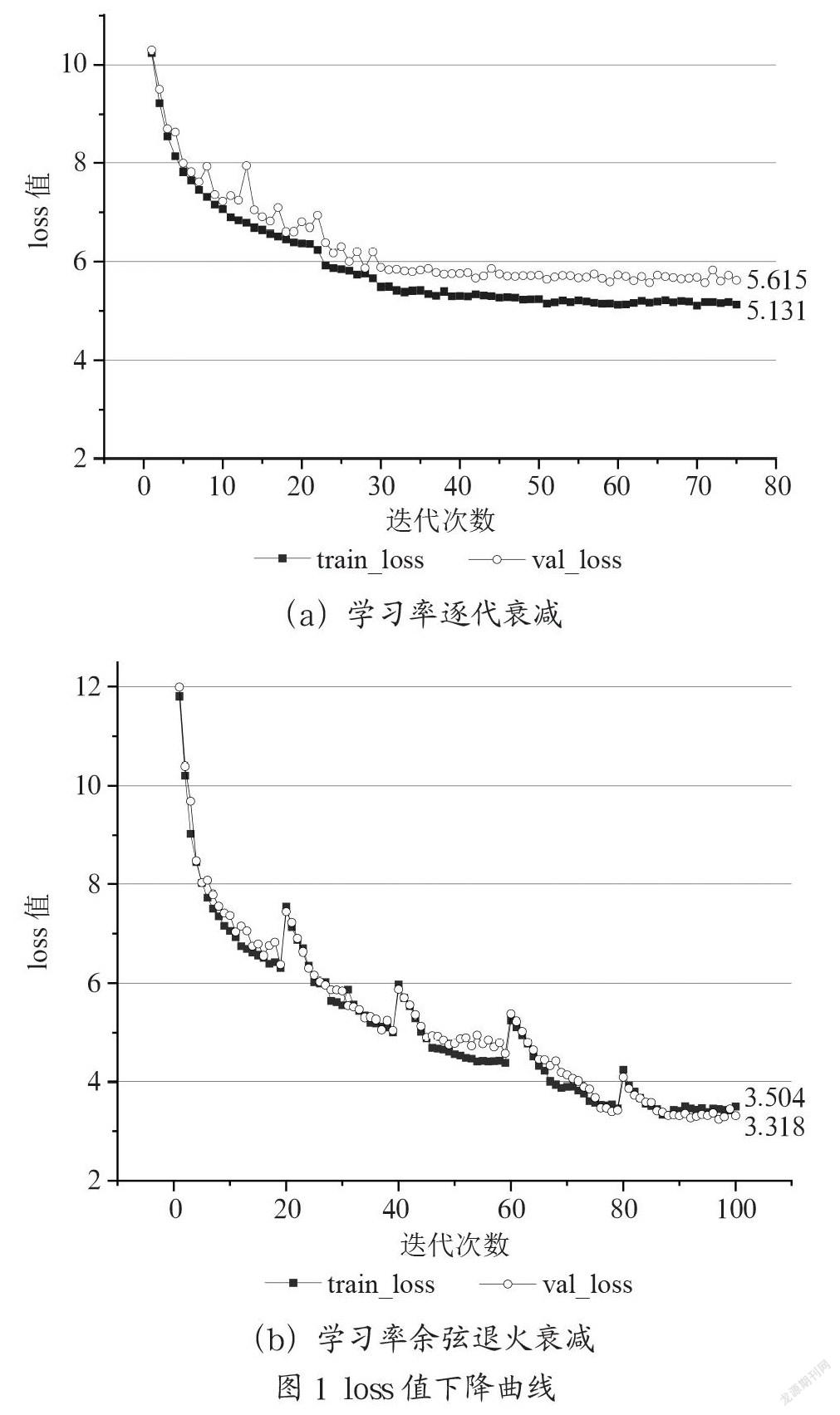
本文首先設置了兩組實驗,分別使用學習率逐代衰減和學習率按余弦退火方式衰減兩種策略在相同的數(shù)據(jù)集下進行訓練并各迭代120次,查看兩組實驗下loss值的下降情況,兩種訓練策略分別在75和100次迭代過后出現(xiàn)早停,繪制loss值按迭代次數(shù)變化曲線如圖1所示,其中train_loss和val_loss分別代表訓練集和驗證集的loss值。
由圖1(a)可見,在學習率逐代衰減的方式下,訓練集和驗證集的loss值在迭代到30次左右趨于平穩(wěn),說明模型學習遇到瓶頸,train_loss和val_loss最終趨于5.1和5.6左右。圖1(b)是運用余弦退火衰減學習率的loss值變化情況,由于本文設置每20次為一個周期進行學習率先上升后下降。從圖中可以看到訓練集和驗證集的loss分別在第20、40、60和80次有明顯的增大,隨后繼續(xù)減小,最終train_loss和val_loss都能降到4以下。說明運用學習率余弦退火衰減策略可以使模型學習跳出局部最優(yōu),尋找一下個最優(yōu)點,相較于學習率逐代衰減的方法,最終的loss值更小,從而提高算法的識別準確率。
4.2? 標簽平滑實驗
設置運用標簽平滑以及不使用標簽平滑的兩組實驗,均在相同的訓練集和驗證集下進行訓練并迭代100次,其中包括30次粗略訓練,70次精細訓練,再用相同的測試集對訓練好的模型進行測試,比較每一類工程機械的Precision、AP值以及單類別漏檢率MR。
在YOLOv4的基礎(chǔ)上,引入標簽平滑后,在略有犧牲鏟車AP值以及漏檢率不變的情況下,吊車,水泥泵車,塔吊以及挖掘機的AP值分別提高了2.86%、4.41%、1.13%、0.73%,漏檢率減小了0.04、0.03、0.02、0.02,說明引入標簽平滑能夠提高樣本的平均精度,提高模型的泛化能力,降低漏檢率。
4.3? 余弦退火和標簽平滑組合對比實驗
通過對余弦退火衰減學習率和標簽平滑兩種策略進行不同的組合,在相同的訓練集和驗證集下進行訓練并迭代100次,其中包括30次粗略訓練,70次精細訓練,比較不同組合方法下的模型的檢測效果,計算其mAP,得到如表1所示。
從表1可以看出,YOLOv4在單獨引入余弦退火衰減學習率以及標簽平滑的策略后,mAP較原YOLOv4分別提升了1.66%和1.69%,說明兩種策略對模型的訓練都有一定的提升作用。本文在YOLOv4的基礎(chǔ)上,同時引入兩種策略來訓練模型,mAP可達88.20%,較原YOLOv4提升了5.43%,表明兩種方法配合使用相比于單獨使用得到的模型效果更優(yōu)。
4.4? 不同算法對比實驗
給定相同的訓練集和測試集,設置相同的訓練條件,分別使用Faster RCNN、SSD、YOLOv3、YOLOv4和本文算法分別進行100次迭代的訓練,包括30次粗略訓練以及70次精細訓練,比較各個算法訓練模型的mAP,mMR以及FPS指標,結(jié)果如表2所示。
從實驗結(jié)果可以看出,5種算法中,F(xiàn)aster RCNN的mAP達89.13%,雖略高于WRLS-YOLOv4算法,但其FPS僅有4.6,遠不能滿足實時檢測的要求。SSD算法的檢測速度最快,F(xiàn)PS可達44.8,但其mAP只有74.81%,檢測準確率較低且平均漏檢率較高。WRLS-YOLOv4算法的平均精度均值可達88.20%,較SSD、YOLOv3以及YOLOv4提升了13.39%、10.5%、5.43%,平均漏檢率較原YOLOv4減小了0.11,有效改善了YOLOv4漏檢率高的缺陷。
為更直觀地驗證本文方法的檢測效果,分別應用4種算法以及本文算法對大型工程機械圖像檢測。
在場景1的對比中,SSD存在明顯的漏檢情況,其他算法均能檢測到3個吊車。在場景2中,YOLOv3和SSD沒有檢測到遠點的塔吊,本文算法和其他兩種算法可以檢測到全部4個工程機械。場景3中,共有6個塔吊,SSD僅檢測到兩個,YOLOv3漏檢1個,YOLOv4檢測到了全部6個塔吊,但本文算法檢測到的塔吊準確率均高于YOLOv4。在場景4的對比中,只有本文算法檢測到了遠點的挖掘機。通過對比不同算法模型的檢測效果可以看出,本文方法訓練出的模型效果更優(yōu),識別準確率更高,漏檢率更低。
5? 結(jié)? 論
本文針對大型工程機械不規(guī)范施工而導致輸電線路故障以及對YOLOv4算法識別準確率低,漏檢率高的問題進行研究,提出一種WRLS-YOLOv4的大型工程機械檢測算法。以YOLOv4為基礎(chǔ)網(wǎng)絡結(jié)構(gòu),引入學習率余弦退火衰減策略,加速模型跳出局部最優(yōu),提高識別準確率。通過標簽平滑對樣本標簽值進行調(diào)整,提升模型泛化能力,減小漏檢率,并針對輸電線路周圍常見的工程機械建立數(shù)據(jù)集,進行多組實驗測試及驗證。通過對比不同算法效果,表明本文算法比原始的YOLOv4方法檢測效果好,在識別準確率以及漏檢率方面都有提升,可以對輸電線路周圍環(huán)境的大型工程機械進行檢測識別,為其安全運行提供保障。
參考文獻:
[1] 劉建偉,周婭,黃祖欽,等.高壓輸電線路除冰技術(shù)綜述 [J].機械設計與制造,2012(5):285-287.
[2] LOSHCHIOV I, HUTTER F. SGDR:Stochastic Gradient Descent with Warm Restarts [J/OL].arXiv:608.03983 [cs.LG].[2021-11-03].http://arxiv.org/abs/1608.03983,2016.
[3] 邱志斌,朱軒,廖才波,等.基于目標檢測的電網(wǎng)涉鳥故障相關(guān)鳥種智能識別 [J].電網(wǎng)技術(shù),2022,46(1):369-377
[4] 朱松豪,趙云斌.基于半監(jiān)督生成式對抗網(wǎng)絡的異常行為檢測 [J].南京郵電大學學報,2020,40(4):50-56.
[5] 謝斌紅,袁帥,龔大立.基于RDB-YOLOv4的煤礦井下有遮擋行人檢測 [J/OL].計算機工程與應用,(2021-04-20).https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=JSGG2021041800B&uniplatform=NZKPT&v=3Qinehu7XHJ1uiLWDnHwCMeat_k_uuMqdTuQF5FxoOrvXKBp-3BWElhF90pYeA29.
作者簡介:余長生(1996—),男,漢族,四川內(nèi)江人,碩士在讀,主要研究方向:異物檢測;通訊作者:秦倫明(1983—),男,漢族,江蘇靖江人,講師,博士,主要研究方向:電力設備在線監(jiān)測、多源圖像視頻信息處理等;王悉(1980—),男,漢族,河北邯鄲人,副教授,博士,主要研究方向:列車智能駕駛,模型預測控制;陳鵬,(1997—),男,漢族,山東青島人,碩士在讀,主要研究方向:深度學習與目標檢測。
猜你喜歡
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現(xiàn)代情報(2016年10期)2016-12-15 11:50:53
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49
中國科技博覽(2016年22期)2016-11-01 18:19:47
軟件工程(2016年8期)2016-10-25 15:47:34
中國科技博覽(2016年19期)2016-10-19 13:11:05
科學與財富(2016年28期)2016-10-14 20:23:24
科學與財富(2016年28期)2016-10-14 04:19:29