基于Petri網的產品設計功能建模方法研究 *
2021-05-18 05:32:58張靜,常寧,楊楊
機械研究與應用 2021年2期
張 靜,常 寧,楊 楊
(1.天津理工大學中環信息學院 機械工程系,天津 300380; 2.卡特彼勒(中國)投資有限公司天津分公司,天津 300308; 3.西科沃克瑞泰克熱處理設備制造(天津)有限公司,天津 300385)
0 引 言
產品的功能設計是以多種功能流及其相互關系為特征的一個設計過程,其中包含多種功能之間的相互關系和相互約束。在產品設計過程中,由于機械設計知識非常豐富、復雜,很多是不確定的和非結構化的[1],且對產品設計多方案的評價不夠客觀,方案之間關系不明確,造成對系統的評價不夠準確,當達到一定運行條件時,所設計的產品就會出現不良結果,增加了后期改進設計的強度與增加費用,造成設計中的不必要的浪費。
而Petri網是一種圖形化和數學化的建模工具,兼顧形式化和圖形化兩個方面,擁有強有力的分析技術和仿真工具[2]。利用Petri網進行產品設計過程建模,可以使復雜的設計知識框架結構化、簡單化。這是一種適合于描述產品功能建模的方法。因此,提出了一種基于Petri網的產品功能建模方法。
1 基于Petri網的產品功能建模方法
產品的功能建模廣泛應用于機械等產品的設計,此方法可以簡潔、直觀的了解所設計產品的功能結構以及實現原理,具體步驟如下:①確定系統的功能關系,通過明確總功能、各個分功能及其重要性來完成;②列出條件,明確邊界條件和初始條件;③尋求實現分功能的作用原理,要在廣泛的范圍內尋求解,消除偏見;④任意組合作用原理,得到更多的原理解;⑤評價并優化,建立Petri網模型,以目標和給定條件為依據進行評價,并對比優化;⑥決斷,得到最優解。
1.1 確定功能關系
19世紀40年代,美國通用電氣公司的工程師邁爾斯首先提出功能的概念。他認為,顧客買的不是產品本身,而是產品的功能。系統的功能就是為了滿足人們的需求,而系統各部件的功能就是為滿足系統目標的實現而服務的。功能(如圖1)是輸入流與輸出流之間的轉換,功能流包括物料流(Material)、能量流(Energy)和信息流(Signals)[3]。
功能分解開始于產品總功能的描述,然后將總功能分解為復雜程度比較低的、較為簡單的分功能,從而使問題的復雜程度降低,以利于產品功能的結構求解。
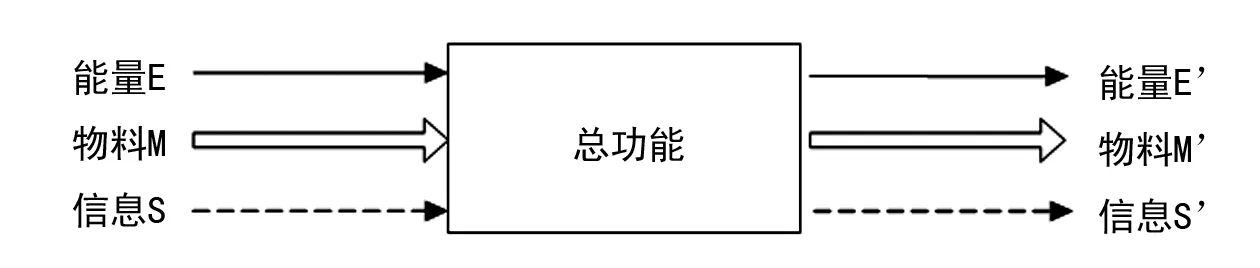
圖1 總功能關系圖
功能分解的方法很多,無論是功能樹方法,還是任務列表,都可用于建立功能模型。功能樹方法主要有兩種方式:一種是自頂向下系統化的功能分析系統技術法(FAST,Function Analysis System Technique)(如圖2),一種是自底向上的[4]。

圖2 功能樹結構
1.2 確定條件
為了確保產品設計的成功率,降低產品成本,需要做到以下幾點:①明確客戶的需求,從而提煉出具有市場潛力的功能要求;②了解現有的發展技術和生產條件,所設計產品要與生產發展需求相適應;③預算產品的經濟效益,要盡可能實現以最小的開發成本,獲得符合市場需求的設計方案;④使環境污染達到最小;⑤要利于產品重復利用;⑥設計要考慮安全性、方便性、舒適度和美觀等[4]。
1.3 尋求作用原理以實現分功能
通常,單獨使用一些物理效應或者將一些物理效應的結合來實現分功能。
1.3.1 尋找原理解的方法
(1) 傳統的方法有:收集信息、分析自然系統、分析已知技術系統、類比和測量與模型測驗。
(2) 直覺的方法有:頭腦風暴法、635法、陳列法、德爾菲法、類比法和聯合法。
(3) 邏輯思維法有:物理過程的系統研究、用分類表進行系統的搜索和設計手冊的使用。
(4) 組合原理解法有:系統性的組合和依靠數學方法的組合。
1.3.2 分功能的實現
將分功能和解決原理以表格形式(見表1),直接、清楚地顯示出各分功能的原理解。

表1 分功能實現原理
1.4 組合原理解
組合原理解的方法有:系統化的組合和借助于數學方法的組合。組合后會得到許多不同程度的實現功能的原理解,這就需要我們選擇最佳解作為產品設計的最終原理方案。
1.5 評價的方法
用Petri網來描述產品的功能,建立模型。從而評價所組合的原理解,選出最優原理解。首先了解一下Petri網的基本概念。
1.5.1 Petri網基本概念
此處應用的Petri網是庫所容量K=∞的庫所/變遷網系統(P/T系統),這屬于高級Petri網,由于雖然基本Petri網描述能力很強,但對于描述復雜的條件,它還是有限的,以下給出高級Petri網的基本定義。
定義1 Petri網是一個六元組Σ=(S,T;F,K,W,M),當且僅當:
(1) S∪T≠Φ;
(2) S∩T=Φ;
(3) F?(S×T)∪(T×S);
(4) dom(F)∪cod(F)=S∪T;其中dom(F)={s∈S∪T|?t∈S∪T:(s,t)∈F},cod(F)={s∈S∪T|?t∈S∪T:(t,s)∈F};
(5) K:S→N+∪{∞}稱為N的容量函數(capacity function);
(6) 對給定的容量函數K,M:S→N,稱為N的一個標識(marking)的條件是: ?s∈S:M(s)≤K(s)。
(7) W:F→N+稱為N上的權函數,對(x,y)∈F,W(x,y)=W((x,y))稱為(x,y)上的權;
其中N+={1,2,3,…},N={0,1,2,…},S和T分別是N的庫所(place)集和變遷(transition)集,F是流關系(flow relation)[5]。
該定義說明Petri網是由庫所、變遷及它們之間的流關系所構成的一個動態網。通過引入變遷發生規則的定義,可以使得標記(token)在網中流動,Petri網的標識不斷更新,從而描述系統的動態過程。
定義2 變遷規則:令Σ=(S,T;F,K,W,M)是一個Petri網,則:
(1) 對于變遷t∈T,變遷t在標識M有發生權(firable)的條件為:?s∈*t: M(s) ≥W(s, t)∧ ?s∈t*: M(s)+W(s, t)≤K(s)
t在M有發生權記作M[t>,也說M授權(enabled)t發生。
(2) 若M[t>,則在標識M下,變遷t可以發生(fire),從標識M發生變遷t得到一個新的標識M′(記為M[t>M′),則對?s∈S,
其中,*t={s| s∈S∪T∧(s, t)∈F},t*={s| s∈S∪T∧(t, s)∈F}分別稱為t(t∈T)的前集和后集。
1.5.2 Petri網建模方法
Petri網是描述和分析具有分析、并發、異步等特征系統的一種有效的模型工具。Petri網建模綜合利用面向事件,面向活動和面向進程的三種建模方法。它不僅能夠自然地描述同步、并發、資源爭用的等特征,且本身自含執行控制機制,非常適用于離散事件系統的描述,是一種常見的離散事件系統建模方法[6]。
1.5.3 產品方案的選擇過程
方案選擇是一個迭代式的五個步驟的過程:
(1) 達成對所有標準的的一致意見。
(2) 達成對所有方案、概念的一致意見。
(3) 對可選方案、概念進行排序。
(4) 對可選方案、概念進行評價。
(5) 對否定意見進行討論。
2 實 例
彈簧是現代工業中常用的元件,大到飛機軍艦,小到手機相機等等各種產品均用到彈簧,因此彈簧的生產已經有幾百年的歷史了。
繞簧機設計是將一根直徑為0.3 mm的鋼絲繞成直徑為2 mm,螺距為2 mm的彈簧的系統設計。實現鋼絲的校直、導料、導向、卷制、定徑和定螺距的功能。
2.1 繞簧機的功能建模
繞簧機的主要結構由傳動、工作和支架三部分組成[7]。繞簧機傳動部分由電機,皮帶和齒輪等組成。由皮帶和齒輪實現減速傳動,從而帶動導料滾輪轉動。工作部分由校直機構、導料滾輪、導絲管、雙頂桿、節距塊和斷絲刀組成。而這些部件都固定在支架上。工作過程中,鋼絲由導料滾輪帶動,經過雙頂桿和節距塊而繞成彈簧。彈簧直徑的大小是用雙頂桿來調整的,彈簧的螺距大小是由節距塊來確定的。
建立總功能和分功能如圖3。

圖3 繞簧機的總功能和主要分功能
2.2 尋求作用原理以實現分功能
2.2.1 原理簡介
初始物料經拉絲模具處理后,得到直徑為0.2 mm的鋼絲。所要設計的結構要能實現鋼絲的送絲,卷絲和輸出彈簧的功能。
(1) 送絲時,要保證鋼絲處于直線狀態(水平或豎直),松緊程度要適當。
(2) 卷絲時,要盡可能減小直徑和螺距的誤差。由此看出,卷絲過程是此模具設計的關鍵。卷絲方式有兩種:有芯模具和無芯模具。
對于有芯模具,芯軸可以是圓錐形(如圖4)或圓柱形(如圖5)。在彈簧卷制過程中,若卷制力越小,卷繞后反向轉動的速度越高,轉數越多,則回彈量就越大。

圖4 功能樹結構1.圓錐形芯軸 2.螺桿 3.導向滾輪 4.導向擺
圓錐形有芯繞簧模具(如圖4)與圓柱形有芯模具(如圖5)中,由4導向擺或扭桿與芯軸的夾角,來確定彈簧螺距的大小。
在生產實踐中,確定回彈量的實質就是確定卷簧芯軸的直徑。導向裝置與芯軸的距離對回彈量也有影響,二者間的距離大,回彈量也大,且不均勻。實際中,影響回彈量的因素復雜。用芯軸定直徑和螺距,容易實現,但是,定螺距需要在芯軸上加槽,考慮到所纏繞的彈簧直徑小,因此,誤差大,出簧困難。

圖5 圓柱形有芯模具1.支架 2.導向環 3.鋼絲 4.扭桿 5.圓柱形芯軸
對于無芯模具(如圖6),誤差小,操作簡單。但是,對節距塊的和頂桿的定位精度要求高。

圖6 無芯繞簧模具1.孔型導料裝置 2.芯軸 3.頂桿 4.切斷裝置 5.節距塊
2.2.2 建立功能結構模型
繞簧機的功能結構模型如圖7所示。
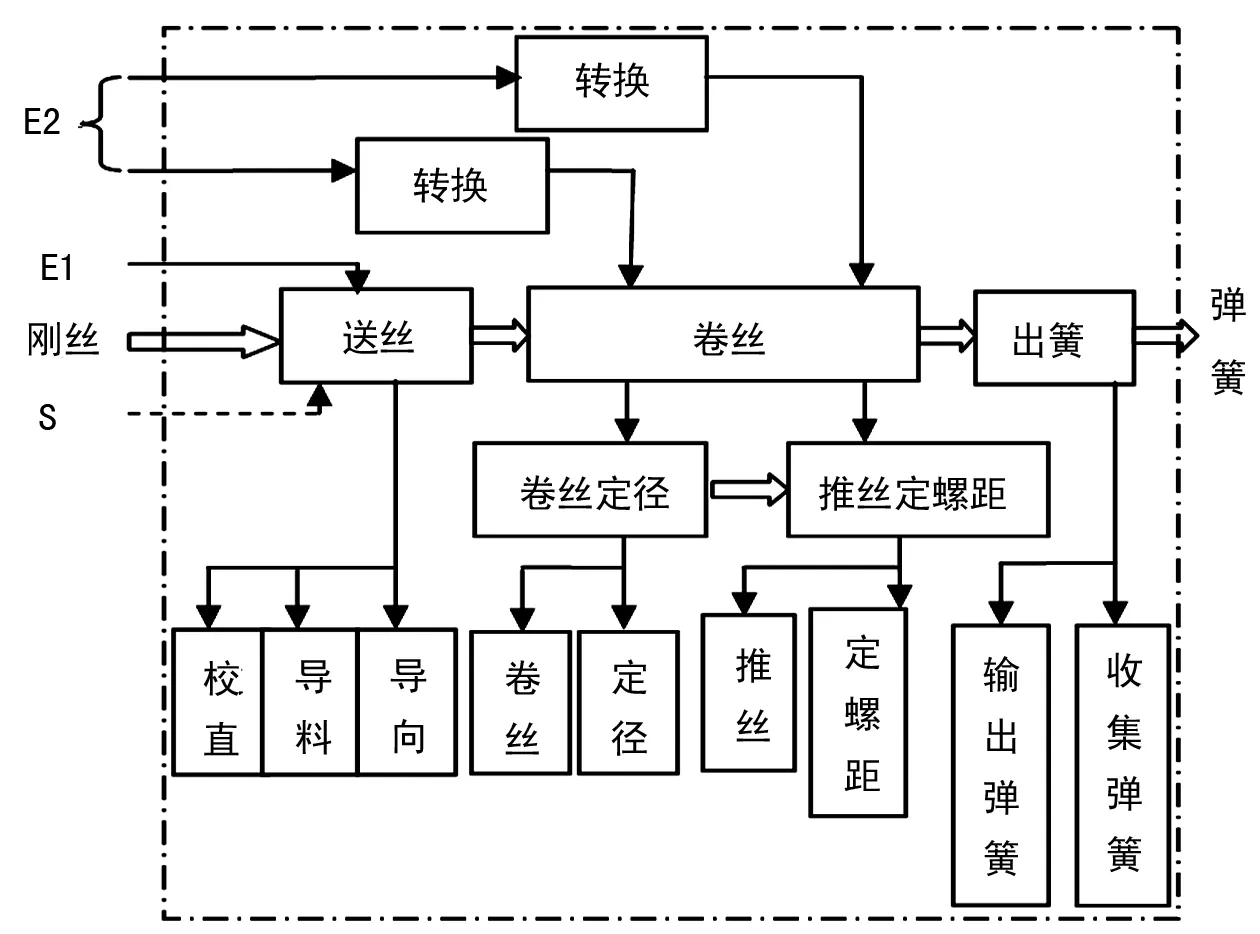
圖7 繞簧機的功能結構模型
2.3 作用原理的組合
作用原理的組合如圖8所示。

圖8 作用原理的組合
2.4 挑選合適的作用原理
根據自動繞簧機的工作原理,校直機構選水平豎直同時校直機構;導料機構選滾輪導料機構;導向機構選導向管;控制送料機構如圖8所示;卷絲機構選頂桿;定徑機構選芯軸;定螺距機構選節距塊,從而得出自動繞簧機原理圖,如圖9所示。
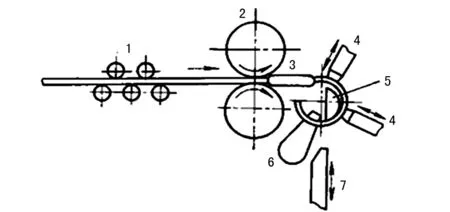
圖9 自動繞簧機原理圖1.校直機構 2.滾輪導料機構 3.導向管 4.頂桿 5.芯軸 6.節距塊 7.切斷裝置
2.5 具體化為原理解
芯軸的外徑:扭簧內徑的確定由芯軸的大小決定,但需考慮扭轉后,簧體的變化,因此需要預留適當的余量。
裝置空間的內徑:若扭轉彈簧裝置采用崁入式,則需考慮崁入式的空間。空間則決定簧體的外徑、自由長、圈數。
動作的起終點:施力扭桿在未做功時,與支點的角度位置,可確定施力扭桿的長短、形式及與支點桿的角度。
2.6 繞簧機工作過程的Petri網描述
2.6.1 繞簧機卷制彈簧的流程
繞簧機工作分三步,即送絲,卷絲和輸出彈簧。
送絲機構包括校直,導料和導向三部分;卷絲機構包括卷絲和定徑兩部分;輸出彈簧機構包括。繞簧機卷制彈簧的流程如圖10所示。

圖10 彈簧機卷制彈簧流程圖
2.6.2 畫出Petri網模型
圖10是繞簧機卷制彈簧過程的Petri網模型,每個庫所表示所處的工作狀態,每個變遷表示工作狀態的轉換[3]。其中庫所元素和變遷元素所代表的意思分別見表2、3所列。

表2 Petri網庫所元素說明
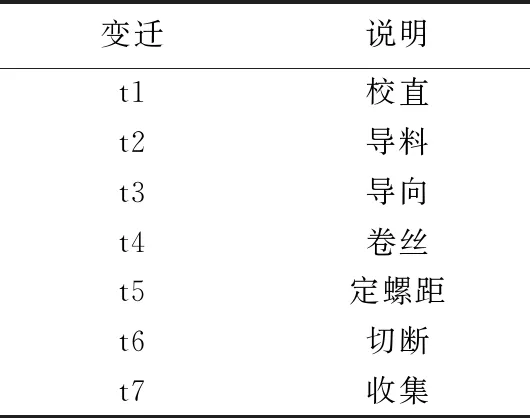
表3 Petri網變遷元素說明
由繞簧機卷制彈簧過程的Petri網模型(見圖11),分析繞簧機的性能:
(1) 有界性:繞簧機的設計是一個可控的循環控制問題,不影響系統的有界性,所以整體產品系統是有界的。
(2) 活性:從初始標識開始,每一個變遷都被至少激發一次,所以所有的變遷都能通過某變遷序列激發,也就是繞簧機的各個狀態的轉變依某邏輯順序是可以實現的,因此,系統是活的。
(3) 可達性:繞簧機設計中Petri網所描述的狀態都能達到,所以系統是可達的,即繞簧機方案實現是合理的。
(4) 前進性:模型中,不存在無用的循環,四個節點的循環都是有益的,可控的,所以系統具備前進性。
通過以上特性分析,可知繞簧機系統的原理解方案,具備邏輯上的合理性與可實現性。

圖11 繞簧機卷制彈簧過程的Petri網模型
3 結 語
將Petri網與功能模型結合起來,得到一種適合于產品設計的功能建模方法理論。該理論方法,首先從分析所設計產品的總功能出發,分析實現總功能的各個分功能,從而建立功能結構模型;其次,尋找實現各分功能的原理,即針對每個分功能,可以找出一系列作用原理;第三,在各分功能的實現原理中,任選一種原理進行組合,即可得到多個原理解;最后,用Petri網建模方法,按照設計產品的工作流程,有條理性的描述產品功能模型,選出最優解。
該方法確定后,以繞簧機為例,建立繞簧機的功能結構模型,得到子功能,然后尋找各功能的作用原理,并組合得到產品的一系列原理解,通過Petri網建模方法選出最優解。由此可以看出,基于Petri網的功能建模方法是可行的。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩詞(2022年6期)2022-12-31 06:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國科技論壇(2017年7期)2017-07-25 08:49:53
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
