一種實現履帶起重機力矩限制器免空鉤標定的算法與應用 *
2021-05-18 05:33:00韓曉東李思奇王永立
機械研究與應用 2021年2期
韓曉東,孫 浩,李思奇,王永立,李 兵
(1.浙江三一裝備有限公司,浙江 湖州 313000; 2.湖州師范學院 工學院,浙江 湖州 313000)
0 引 言
隨著工程機械的快速發展及國內外市場需求的擴大,履帶起重機憑借其可負載行駛、爬坡能力強、接地比壓小等獨特的優勢,在路基建設、風力及化工建設等領域具有較大的市場占有率,具有其他起重設備無法替代的地位[1]。GB6067.1-2010《起重機械安全規程》規定額定起重量隨工作半徑變化的起重機需要安裝力矩限制器,可有效防止超載引起臂架結構件斷裂或車體翻車的危害,減少設備損害和人員傷亡[2]。
目前力矩限制器在實際應用中主要采用反推的方式,通過跑空鉤以獲取臂架自重力矩,進而計算實際吊載重量[3]。該方法需要對不同的工況均實行跑空鉤標定,因此較為繁復。筆者提出一種可實現力矩限制器免空鉤標定的算法與應用,能夠提高其計算效率。
1 力矩限制器原理
履帶起重機力矩限制器算法是通過獲取拉板拉力、臂架角度,以臂架根部絞點為中心建立力矩平衡方程式,再根據方程即可求解臂架吊重,其算法原理如圖1所示。

圖1 力矩限制器算法原理
圖中:A為臂架根部絞點;B為為滑輪中心;a為臂架角度;L為臂架長度;F為拉板拉力;f為鋼絲繩拉力;n為鋼絲繩倍率;H為滑輪效率。
F×LF+f×Lf=T×LT+G×LG+
mg×Lmg
(1)
式中:f=mg/nH,L、α為已知變量,并結合已知結構參數,通過三角關系即可求得公式(1)中各自拉力對應的力臂LF、Lf、LT、Lmg、LG,進而可以計算臂架吊載重量。
2 免空鉤標定
2.1 免空鉤標定算法的研究
免空鉤標定算法能夠根據不同的臂架工況自動計算臂架自重力矩。臂架長度決定臂架的重量,臂架角度決定臂架的力臂,因此通過臂架長度、臂架角度即可計算臂架自重。免空鉤標定算法原理如圖2所示,其中臂架角度由臂架角度傳感器檢測獲取;臂架重量由臂架長度決定,均為已知變量。臂架自重力矩計算公式:
(2)
式中:GX為臂架重心到臂架根部絞點的距離;GY為偏移量。

圖2 免空鉤標定算法原理
2.2 免空鉤標定算法的實現
免空鉤標定算法中臂架自重力矩的計算通過空鉤標定計算軟件實現,該軟件可根據車型和工況自動計算對應臂架的自重力矩。計算的數據存儲在控制器存儲單元中,系統可根據對應的工況自動調用,軟件界面如圖3所示。

圖3 空鉤標定計算軟件
2.3 實驗對比分析
試驗檢測數據以SCC3200A車型為例,針對18種不同的履帶起重機臂架工況,采用免空鉤標定算法得到的計算值與檢測值對比如圖4所示。
應用本文提出的免空鉤標定算法,得到的18種工況下臂架自重力矩的具體計算值如表1所列。
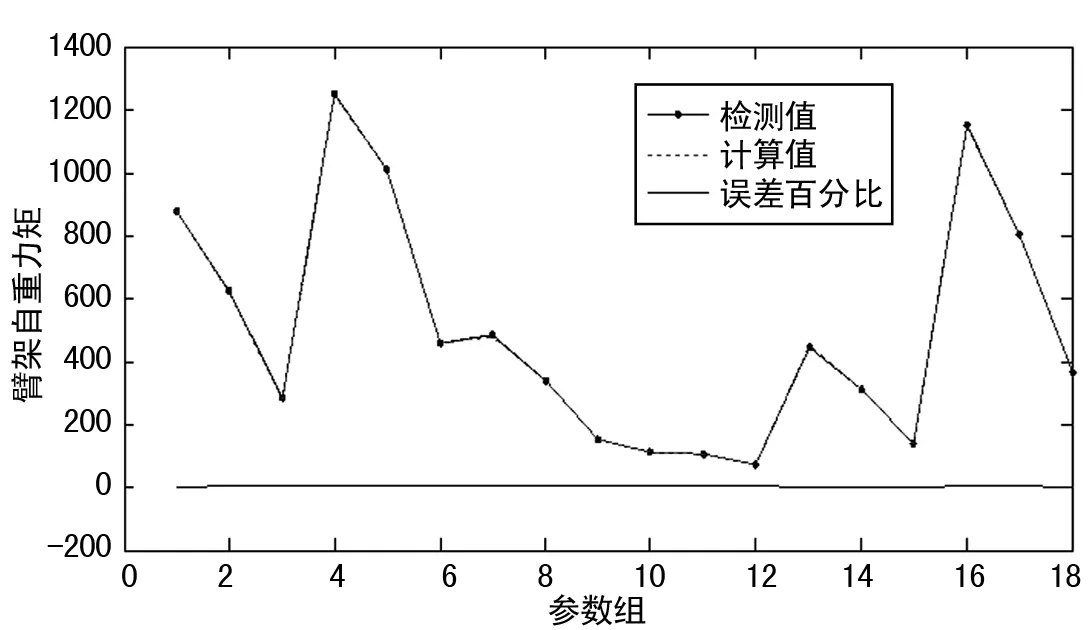
圖4 免空鉤標定算法臂架自重力矩的檢測值與計算值

表1 臂架自重力矩的檢測值和計算值
通過上述18種不同工況對比分析,臂架自重力矩試驗檢測值和理論計算值的誤差率在0.159 3%~1.589 0%。造成誤差的原因主要有,拉力傳感器和角度傳感器精度存在誤差;推導模型相對理想化,沒有考慮臂架撓度等其他因素的影響。在試驗檢測中誤差基本控制在1.5%以下,可以滿足力矩限制器綜合誤差精度的要求。
3 結 語
提出一種力矩限制器免空鉤標定的算法與應用,該算法能夠計算臂架自重力矩,與實驗檢測值的誤差在1.5%以內。該算法可以應用到履帶起重機力矩限制器的免空鉤標定中,能夠提高履帶起重機的工作效率和經濟效益。
