水電站高邊坡實景三維建模工程應用
2021-05-19 01:24:02尚海興柯生學賀春林
西北水電 2021年2期
關鍵詞:模型
張 釗,尚海興,柯生學,邢 文,賀春林
(中國電建集團西北勘測設計研究院有限公司,西安 710065)
0 前 言
建立水電站規劃階段高邊坡實景三維傾斜攝影模型不僅能直觀反映空間屬性[1],也可從不同視角、不同距離了解興趣區山體裂縫、滑坡體狀態,其對水工設計、地質勘測等工作具有一定輔助作用。目前,水電站高邊坡三維建模存在落差大、陰影重、像控點難以布設、空中三角測量復雜等技術難題,許多工程師及科研人員通過多種手段解決這些問題。尚海興、白芝勇提[2-3]使用Phantom4 RTK航攝系統仿地飛行、多角度拍攝方法實現減免地形圖測圖和建模時的像控點數量,但該方法在高落差、大面積的試驗區作業效率低,且短焦鏡頭也無法適用水電站高邊坡;張軍等[4]通過對航攝儀進行檢校、對焦至無窮遠處、建立影像畸變模型等方法糾正部分畸變,但無法大幅度控制鏡頭畸變,無法解決峽谷兩側光照亮度不同,空中三角測量解算困難的問題。
本文以西藏某項目為例,以水電站壩址區高邊坡作為試驗區進行航攝并建模,采用五鏡頭航攝儀配合高精度PPK系統輔助平差,減少像控點數量,同時提高空中三角測量成功率,較常規單鏡頭相機生產出的三維實景模型紋理更優、漏洞更少。
1 測區概況
1.1 測區概況與試驗準備
測區位于西藏某高海拔地區,山體陡峭、樹木高大、植被覆蓋較厚,是兩山夾一河的峽谷地形。試驗測區投影面積約為1.5 km2,谷底路面海拔約為3 100.00 m,相對高差最大約為700 m。常規方法布設像控點難度大,僅能沿溝底道路布設少量像控點;植被覆蓋厚,常規方案空中三角測量計算易失敗;落差大,分辨率難以統一。根據水電站可研階段勘察設計需求,擬構建傾斜攝影三維實景模型,后期可依托模型采集生產1∶2000地形圖和若干水文斷面。
2 試驗方案
根據GB/T 19294-2003《航空攝影技術設計規范》對航攝分區的要求,分區內地形高差一般不大于1/4相對航高[5]。而測區峽谷中高差大、林木高聳,統一航高會導致谷底分辨率過低或頂部影像重疊度不足,常規固定翼無人機巡航速度快、作業效率高等優勢將在峽谷地區受到限制,無固定翼盤旋及轉彎條件。綜上所述,利用旋翼無人機出轉彎靈活、姿態穩定、飛行風險低等優勢進行變高仿地飛行保證飛行安全,預設航攝參數輔以五鏡頭長焦航攝儀保證模型精度及紋理質量。像控工作完成后,采用短焦單鏡頭Phantom4 RTK設備進行等條件、同參數航攝建模,用于后期進行2種不同設備模型觀感對比,此設備及航攝參數不再具體敷述。
2.1 航攝系統情況及優勢簡介
本套系統使用 KWT-X6L-15六旋翼無人機搭載RB-DG4Pros五鏡頭航攝儀,該系統相機具有優異的光學性能,可補償像差且將光學鏡頭畸變率嚴格控制到千分之四以內,起到減免像控的作用。因山體高差大,峽谷兩側長期光照不均,存在陰影,常規單鏡頭相機光線補償困難,常會出現一景影像兩側亮度反差大的情況,故對航攝時段選擇要求較高。本套航攝儀可以設置5個鏡頭分別自動調節感光度(ISO)及曝光參數(EV)進行曝光補償,每個鏡頭單獨進行成像,大面積改善陰影區曝光強度,避免模型成果出現“陰陽”差異,影響模型觀感。本套航攝系統參數詳細信息見表1。
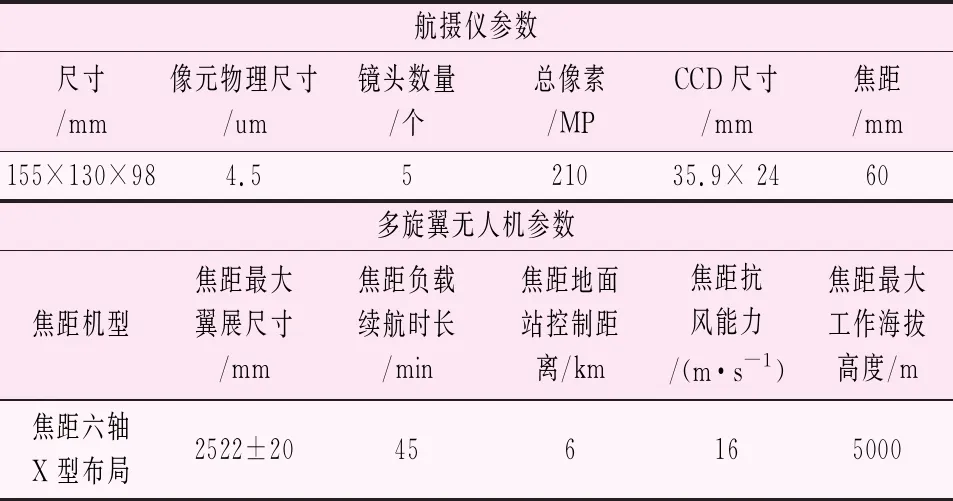
表1 航攝系統參數表
該航攝儀4個側視鏡頭分別對應航攝的前后左右4個方向,并與下視鏡頭成45°夾角。作業時,5個角度的鏡頭同時進行曝光,并同步記錄機載差分數據,用于提升后期空中三角測量計算速度和成功率。隨著峽谷山體角度變大,五鏡頭航攝儀較之單鏡頭優勢明顯,可極大提升航攝重疊度和單次曝光攝影范圍,前后視角的鏡頭可以拍攝到下視鏡頭無法拍攝到的陡峭山壁和倒崖;左右鏡頭可擴大單航線拍攝范圍,獲取更多山體側面紋理,使得模型產品各角度紋理充足,從而減少模型漏洞。此亦有利于后期在模型中準確測制所需要的水文斷面,使庫區容量計算更加準確。
2.2 航攝方案
因航攝既要保證充足的光照,又要避免因山體陡峭出現過大陰影,故航攝選在中午前后各1 h時段內進行,本時段航攝能最大程度弱化其對航攝質量的影響。
本套設備基于開放的地面站軟件系統按高度分層布設航線,進行變高仿地飛行。此操作解決了高邊坡地形布設等高航線出現前文提到的問題;測試區具體參數為:下視鏡頭航攝地面分辨率5 cm,航向重疊度80%,旁向重疊度70%,攝影基線長度48 m,航飛速度設置為8 m/s,轉彎模式為定點轉彎。本次航飛方案主要特點如下:
(1) 變高飛行
本次測試共敷設12條航線,航線參考Google earth軟件中的DEM預留安全高度,自河流左岸逐層過度上升后由右岸逐層下降;峽谷兩側航線相對航高均分為6層,自500~1 000 m每100 m為一層。每條航線高度隨攝影基準面變化而變化,航高改變也直接影響航攝分辨率和航攝重疊度,防止出現因陡峭地形導致最高點重疊度不足或最低點分辨率無法滿足航攝預設要求的情況。
(2) PPK應用
PPK是利用載波相位進行事后差分處理獲取坐標的GNSS 定位技術[6],其無需實時通訊,可應對因峽谷地區信號遮擋嚴重RTK技術造成的數據斷鏈情況,高精度高頻率PPK設備可準確內插出相機曝光點的精準空間位置[7],再配合相機固有夾角提供的3個外方位角元素初始值及5個鏡頭的相對幾何關系,快速定位相鄰影像,提高空中三角測量效率。
隨航飛速度增加,機載GNSS模塊定位會產生線性偏移。本次將航飛預設速度減慢雖降低了部分航攝效率,但提升了差分成果精度。機載差分設備與差分基準站通過相對動態定位獲取曝光點坐標,作為區域網平差中的附加攝影測量觀測值,再與地面像控點進區域網聯合平差,此時地面控制點數量可大幅減少。GNSS輔助空中三角測量的模擬理論[8]認為: GNSS攝站外方位線元素效果優于角元素,且其在區域網聯合平差中極其有效,甚至差分坐標代入平差可免除像控點。差分系統與機載差分設備聯合平差的理論為:機載GNSS差分設備相位中心與航攝儀投影中心利用像片姿態角φ、ω、κ所構成的正交變換矩陣R可得到如下關系式(1)[9]:
(1)
式中:XA,YA,ZA分別為機載差分系統相位中心大地坐標;XS,YS,ZS分別為航攝儀投影中心大地坐標;u、v、w分別為相位中心在像方坐標系中的3個坐標分量。
若像點a在以像主點為原點的像平面坐標系中的坐標為(x,y) , 機載差分系統相位中心在物方空間坐標系中的地面坐標為(X,Y,Z), 則像平面坐標與物空間坐標理論上應滿足投影中心-像點-物點位于一條直線的共線條件方程如式(2)[10]:
(2)
式中:f代表航攝儀主距;a1、a2,…,c3分別為影像外方位角元素表示的方向余弦。
2.3 像控方案
因交通原因,本次實驗區無法按照常規方案全區均勻布設像控點,航攝作業前僅在測試區內河邊路面上均勻布設9個平高像控點,并進行現場采集坐標。后使用以下方法實測大量檢查點,用于建模后對模型精度進行檢查評估,像控點、曝光點位置分布見圖1。

圖1 像控點、曝光點位置分布示意圖
(1) 沿河道路邊遠離像控點位置使用GNSS-RTK技術測量若干碎步點;
(2) 使用機載雷達設備對測區進行掃描,濾波稀釋后保留若干地面特征點。
2.4 空中三角測量平差及建模方案
航攝完成后使用與該套航攝系統配套的SkyScanner軟件剔除非關注區域的側視影像,減少冗余數據的計算量,然后將所有影像和與之對應PPK計算出的差分位置信息自動結合生成block文件。再將其導入本次空中三角測量計算平差及建模使用的軟件中,建模技術路線流程為:數據預處理→block文件導入→航攝儀參數導入→坐標系統定義→空中三角測量參數設置→自由網空中三角測量→引入像控點→約束網空中三角測量→空中三角測量精度檢查→三維模型生產。
在落差大、植被厚的林區進行空中三角測量計算難度大。本次對關鍵點密度、影像組件構造模式、徑向畸變、切向畸變等參數進行自定義設置,從而提升空中三角測量成功率。空中三角測量設置見圖2,空中三角測量平差精度表見表2。

圖2 空中三角測量圖
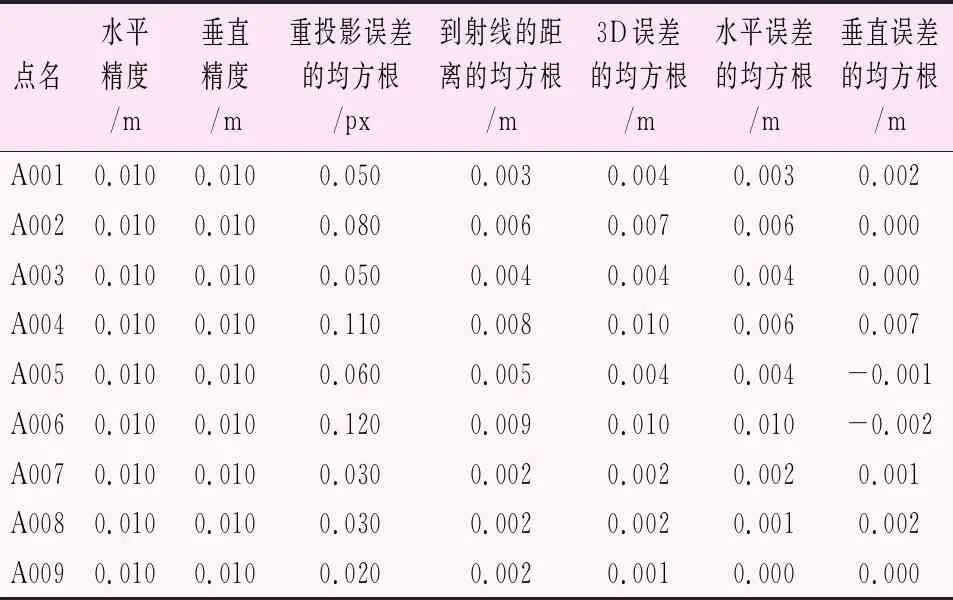
表2 空中三角測量平差精度表
3 精度、紋理檢查與分析
3.1 模型觀感對比
建模完成后對比發現常規Phantom4 RTK設備建立的模型表面紋理差,樹林中細節變形嚴重、出現漏洞,峽谷兩岸出現亮度不均、觀感差等情況。而使用本套設備及方案建立的模型紋理清晰、無漏洞,峽谷兩岸幾乎無亮度差別,顏色均勻,觀感良好。單鏡頭短焦相機與五鏡頭長焦相機模型細節紋理質量對比圖和模型色差及陰影對比見圖3、4。

圖3 單鏡頭短焦相機(左)與五鏡頭長焦相機(右)模型細節紋理質量對比圖

圖4 單鏡頭短焦相機(左)與五鏡頭長焦相機(右)模型色差及陰影對比圖
3.2 精度評定及分析
為了檢查本次試驗的生產精度,使用上文所述方法預先獲取的若干地面檢查點野外實測坐標,與其模型采集坐標進行比對并式(3)所示計算中誤差,誤差公式:
(3)
式中:m為中誤差,mm;Δ為真誤差,mm;n為觀測值個數。
因試驗區為流域重點水電站選壩河段,故項目內部控制精度指標高于NB/T 35029-2014《水電工程測量規范》標準。參照NB/T 35029-2014《水電工程測量規范》[11],平面中誤差限差按規范中表3.0.5-3中的1∶1000丘陵地成圖精度執行,即為0.60 m;高程中誤差限差按規范中表3.0.5-4中山地高程中誤差執行,即為0.66 m。計算完成后,按照地面檢查點與像控點高差每100 m為一類進行分類列表對比。檢查點相對像控點高差與精度關系見表3,檢查點相對像控點高差與平面中誤差關系見圖5,檢查點相對像控點高差與高程中誤差關系見圖6。
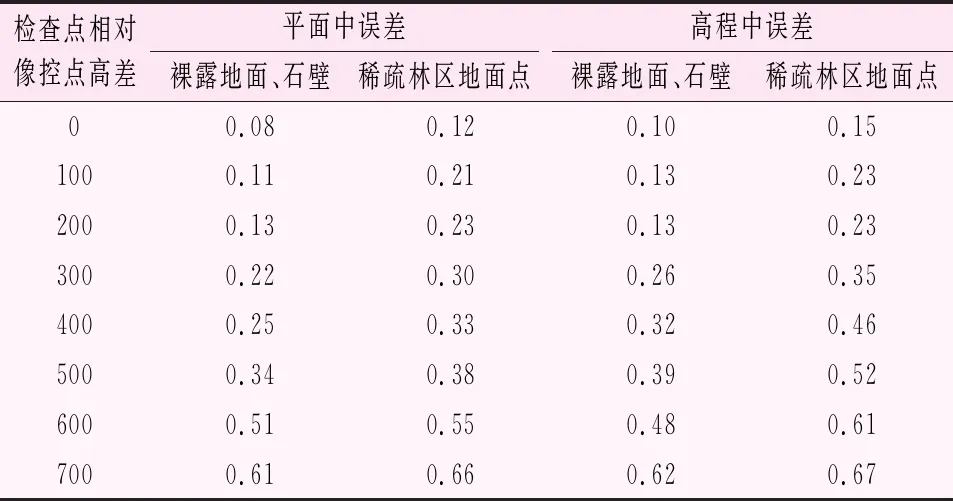
表3 檢查點相對像控點高差與精度關系表
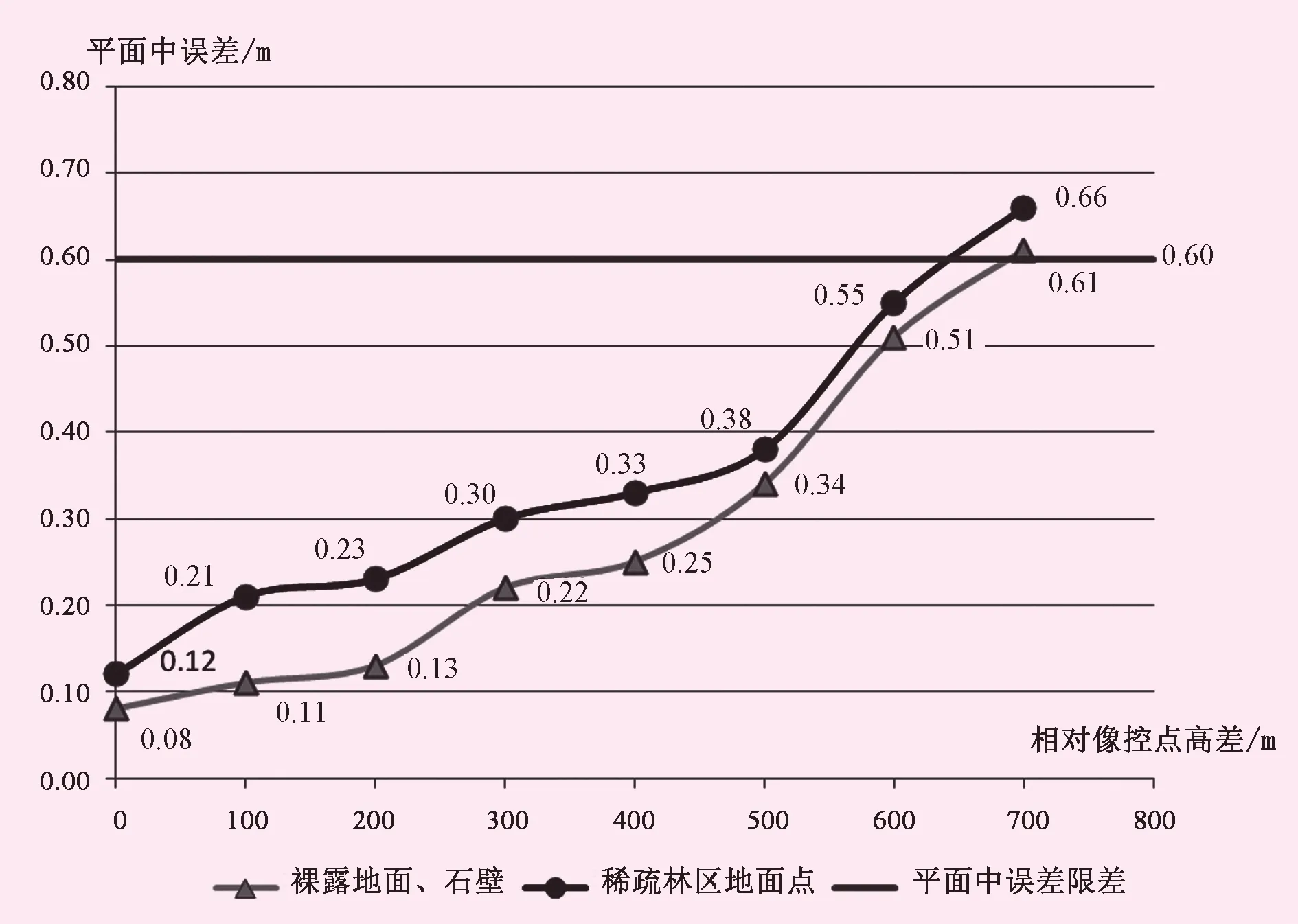
圖5 檢查點相對像控點高差與平面中誤差關系圖
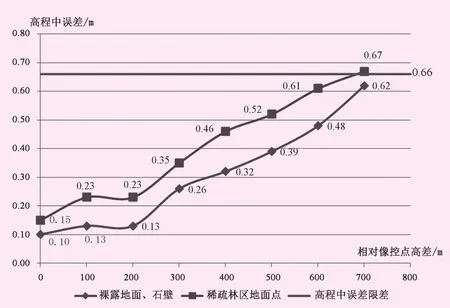
圖6 檢查點相對像控點高差與高程中誤差關系圖
4 結 語
基于本次作業和航攝方案,在相對高差700 m、投影面積1.5 km2的試驗區中,僅在谷底布設9個平高像控點后進行航攝作業、模型生產、檢查成果精度。在檢查計算后,對比項目內控精度指標和規范限差,發現稀疏林區平面和高程中誤差均大于裸露的地面和石壁;且隨著地面檢查點與像控點的相對高差變大,所有檢查點的實測坐標與模型采集坐標平高中誤差均逐漸變大,在檢查點相對像控點高差600 m以下時精度滿足項目內控指標要求;在達到700 m時超出內控指標,但仍滿足1∶2000測圖規范精度。經加入不同數量像控點的多種方法計算,發現本套設備及方案在本實驗區1.5 km2范圍內像控點合理數量為9個,若大于9個像控點,平面和高程精度并未發現大幅提升。
本文對比介紹了本套系統在水電站高邊坡實景三維建模中的應用,其中長航時多旋翼為電量消耗大的變高飛行方案提供了有力支持,通過使用長焦距、小畸變五鏡頭相機進行航攝,配合高精度PPK系統輔助平差減少了像控點數量,提高了空中三角測量成功率,有效解決水電站高邊坡實景建模工程中常規單鏡頭相機航攝模型觀感差、漏洞多等問題。該地區使用本套設備和方案可滿足1∶2000模型精度且紋理良好、無明顯亮度差和色,為其他落差高、植被厚的峽谷地區三維建模提供了思路。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
