基于飛蛾火焰算法的AUV三維全局路徑規(guī)劃
2021-05-26 09:48:22徐煒翔朱志宇
上海理工大學(xué)學(xué)報(bào) 2021年2期
關(guān)鍵詞:規(guī)劃
徐煒翔,朱志宇
(江蘇科技大學(xué) 電子信息學(xué)院,鎮(zhèn)江 212003)
自主水下航行器(autonomous underwater vehicle,AUV)的路徑規(guī)劃是海洋探索和科學(xué)研究的關(guān)鍵問(wèn)題。由于海洋環(huán)境的復(fù)雜性,研究能夠在水下三維環(huán)境和復(fù)雜海流下實(shí)現(xiàn)自主路徑的AUV路徑規(guī)劃方法已成為研究熱點(diǎn)[1]。AUV全局路徑規(guī)劃的主要過(guò)程是將整個(gè)路徑劃分為若干個(gè)子路徑點(diǎn),使AUV能夠沿著子目標(biāo)點(diǎn)構(gòu)成的無(wú)碰路徑安全地移動(dòng)到終點(diǎn)[2]。近年來(lái),關(guān)于AUV路徑規(guī)劃的研究越來(lái)越多,例如:使用改進(jìn)的蟻群算法[3]、A*算法[4]、人工勢(shì)場(chǎng)算法[5]、快速擴(kuò)張隨機(jī)樹(shù)算法[6]等。Zhu等[7]提出了一種基于生物啟發(fā)自組織圖的方法,實(shí)現(xiàn)了AUV的路徑規(guī)劃和自主導(dǎo)航。Yan等[8]提出了一種改進(jìn)粒子群優(yōu)化方法,用于二維平面障礙環(huán)境中AUV歸航和對(duì)接任務(wù)的自主路徑規(guī)劃。孫葉義等[9]全面闡述了AUV路徑規(guī)劃的實(shí)際困難,總結(jié)了目前成熟的規(guī)劃方法。
目前大多數(shù)研究成果將AUV的路徑規(guī)劃問(wèn)題限制在二維環(huán)境中,而對(duì)于實(shí)際三維空間中的路徑規(guī)劃研究更有意義[10]。尤其是在復(fù)雜的海底地形和存在海流干擾的情況下,基于傳統(tǒng)方法的規(guī)劃方式極大地增加了AUV不必要的能量損耗,降低了使用壽命,甚至導(dǎo)致AUV無(wú)法正常運(yùn)行。曹翔等[11]將速度合成方法與生物自組織神經(jīng)網(wǎng)絡(luò)相結(jié)合,用于三維水下工作空間,同時(shí)考慮了各種情況的海流因素,以最小能耗為代價(jià)函數(shù),從而有效地解決了海流對(duì)AUV的影響。但是,這種方法在遇到復(fù)雜障礙物時(shí)運(yùn)行效率緩慢,難以應(yīng)用于實(shí)際任務(wù)。在海洋環(huán)境下,各類復(fù)雜的海洋環(huán)境因素需要被考慮到規(guī)劃問(wèn)題中,如海流、渦流、鹽度、溫度等。若能將各類環(huán)境影響因素信息采集處理并加以利用,則可極大地提高路徑質(zhì)量,擴(kuò)展更多的應(yīng)用范圍。
啟發(fā)式算法已被廣泛地用于機(jī)器人路徑規(guī)劃,如粒子群優(yōu)化算法[12]、人工蜂群算法[13]、布谷鳥(niǎo)搜索算法[14]等。Mac等[15]全面分析和比較了各種啟發(fā)式算法在路徑規(guī)劃中的應(yīng)用,總結(jié)了每種啟發(fā)式算法的優(yōu)缺點(diǎn)。這些傳統(tǒng)的啟發(fā)式算法主要受結(jié)構(gòu)復(fù)雜、參數(shù)多、全局搜索能力不強(qiáng),以及過(guò)早收斂的限制,難以達(dá)到期望的規(guī)劃效果。2015年,Mirjalili[16]提出了一種新的啟發(fā)式算法,即飛蛾火焰優(yōu)化(moth-flame optimization,MFO)算法,其靈感來(lái)自于飛蛾的特殊導(dǎo)航方法。飛蛾在自然界中使用一種稱為側(cè)向定位的特殊機(jī)制來(lái)與月球保持固定角度,以保證直線飛行。但是在人造光下,它們將以螺旋路徑環(huán)繞點(diǎn)光源,最終匯聚在光源上。在MFO算法中,飛蛾和火焰的位置都是搜索空間中可行的解,其中火焰是飛蛾目前搜索到的最佳位置,通過(guò)不斷更新飛蛾的位置來(lái)搜索最優(yōu)解。飛蛾位置的螺旋更新機(jī)制確保了飛蛾不會(huì)丟失最優(yōu)解,同時(shí)保證了極高的搜索效率。作為一種全新的啟發(fā)式算法,MFO算法相較于傳統(tǒng)啟發(fā)式算法在搜索速度和全局性上有明顯優(yōu)勢(shì),且已經(jīng)在工程領(lǐng)域得到了廣泛運(yùn)用,并取得了很多成果[17]。所以將MFO算法運(yùn)用在路徑規(guī)劃領(lǐng)域有廣闊的前景。
本文重點(diǎn)研究水下三維復(fù)雜環(huán)境和靜態(tài)海流下的AUV路徑規(guī)劃問(wèn)題,提出了一種基于MFO算法的AUV全局路徑規(guī)劃方法。結(jié)合AUV自身能耗模型,設(shè)計(jì)出基于能耗最優(yōu)的適應(yīng)度函數(shù)。根據(jù)飛蛾位置更新機(jī)制,調(diào)整路徑點(diǎn)位置,不斷迭代得到最佳路徑。
1 環(huán)境模型構(gòu)建
1.1 三維地形模型
環(huán)境建模是路徑規(guī)劃的基礎(chǔ)部分。假設(shè)海洋環(huán)境地圖數(shù)據(jù)是已知的。采用柵格法對(duì)已知深度數(shù)據(jù)的X軸和Y軸進(jìn)行插值來(lái)獲得初始地形,將水平面與XOY重合,設(shè)定AUV沿X軸前進(jìn)[18]。所得水下三維地形環(huán)境如圖1所示。
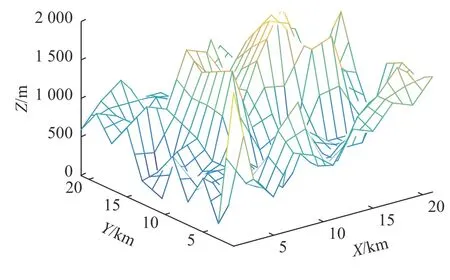
圖1 三維路徑規(guī)劃空間Fig. 1 Three-dimentional path planning space
1.2 靜態(tài)海流模型
考慮到AUV在真實(shí)的海洋環(huán)境中航行會(huì)受到海流、波浪和風(fēng)等各種環(huán)境因素的影響,其中波浪和風(fēng)的影響在水平面2 m以下可以忽略不計(jì),所以僅考慮海流對(duì)AUV運(yùn)動(dòng)的影響[19]。由于地球的自轉(zhuǎn)效應(yīng),海流在水平面中的運(yùn)動(dòng)要比垂直面中的運(yùn)動(dòng)大得多,所以假設(shè)海流在垂直方向上的速度為零,將海流視為在二維水平面中的運(yùn)動(dòng)。將空間縱軸Z按照深度分層,每層都是一個(gè)XOY的二維平面。在該平面進(jìn)行網(wǎng)格劃分,每個(gè)網(wǎng)格是一個(gè)邊長(zhǎng)為1 km的正方形,單個(gè)網(wǎng)格的海流因?yàn)樽兓葮O小而被視為常值。海流模型的數(shù)值方程由多個(gè)粘性渦流函數(shù)疊加表示[20],其數(shù)學(xué)描述如下:
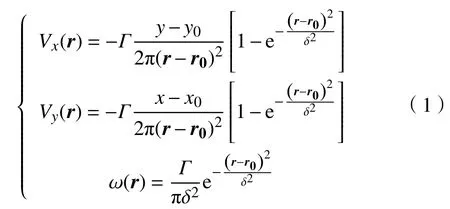
式中:r,r0分別為當(dāng)前位置和渦流中心的坐標(biāo)矢量;δ為渦流半徑;Γ 為渦流強(qiáng)度;Vx(r) ,Vy(r)分別為水平方向和垂直方向的渦流速度分量。本文僅考慮海流隨空間變化的情況,假設(shè)在AUV任務(wù)期間單位海流在區(qū)域中是恒定的。文中假設(shè)的海流參數(shù)分別為:δ=1.0 ;Γ=10;渦流中心矢量r0取平面空間中3個(gè)隨機(jī)坐標(biāo)點(diǎn)。所生成的海流勢(shì)場(chǎng)如圖2所示。
圖2 海流空間勢(shì)場(chǎng)Fig. 2 Spatial potential field of ocean currents
2 AUV能耗模型
AUV的總能耗由AUV在靜態(tài)環(huán)境下的移動(dòng)能耗和海流影響下的能耗疊加而成[21]。首先,建立AUV的水阻力與航行速度的方程、推進(jìn)器推力與效率的方程,計(jì)算獲得AUV在靜態(tài)條件下移動(dòng)時(shí)計(jì)劃路徑的總能耗;然后,將從流場(chǎng)函數(shù)獲得的當(dāng)前海流速度矢量添加到AUV航速模型中,求得AUV的真實(shí)航速;最后,將真實(shí)航速帶入到能耗方程中,獲得在當(dāng)前環(huán)境中移動(dòng)的AUV總能耗。
由于全局路徑規(guī)劃基于先驗(yàn)的水深環(huán)境數(shù)據(jù),僅考慮地形深度數(shù)據(jù)即靜態(tài)障礙物,而不考慮移動(dòng)障礙物,因此,AUV在獲得的路徑子目標(biāo)點(diǎn)間行駛,忽略了明顯的轉(zhuǎn)向動(dòng)作。為了簡(jiǎn)化計(jì)算的復(fù)雜度,假設(shè):
a.AUV在整個(gè)航行過(guò)程中以恒定的速度直線行駛,忽略了路徑初始階段的加速和路徑終點(diǎn)階段的減速;
b.AUV全局路徑基本平滑,忽略航行過(guò)程中由轉(zhuǎn)向引起的減速和加速過(guò)程。
AUV在水下航行時(shí)主要克服水阻力。根據(jù)流體力學(xué)公式,AUV所受的水阻力Fz為

式中:C為流體動(dòng)力系數(shù),其值與傳播介質(zhì)、機(jī)器人的形狀等因素有關(guān),根據(jù)一般經(jīng)驗(yàn)取0.7;ρ為水體密度;v為AUV的航行速度;S為AUV的橫截面積,本文中試驗(yàn)原型機(jī)的橫截面積為0.0625 m2。根據(jù)式(2)可得

當(dāng)AUV在靜態(tài)環(huán)境中移動(dòng)時(shí),忽略AUV推進(jìn)器外部所有組件的能量損耗,假設(shè)AUV的所有能耗都是為了克服水阻力。在勻速運(yùn)動(dòng)時(shí),水阻力等于推進(jìn)器推力。因此,在計(jì)算能耗時(shí),可以使用上式來(lái)構(gòu)建能耗函數(shù)。根據(jù)牛頓第二定律,AUV在恒定速度下的合力應(yīng)為零,即螺旋槳產(chǎn)生的推力等于水阻力。本文中AUV原型的推進(jìn)器使用Maxon無(wú)刷直流電動(dòng)機(jī)。經(jīng)過(guò)試驗(yàn)測(cè)試,采用二次函數(shù)擬合得到推力Ft與輸出功率P的對(duì)應(yīng)關(guān)系為

Maxon推進(jìn)器使用無(wú)刷直流電動(dòng)機(jī),具有獨(dú)特的機(jī)械特性,即在一定速度范圍內(nèi),隨著電動(dòng)機(jī)速度的增加,機(jī)械效率會(huì)逐漸提高。在忽略其余部件能量消耗的情況下,即AUV所有能耗等于電機(jī)能耗。此時(shí),AUV的航行速度與推進(jìn)器的工作效率η存在以下對(duì)應(yīng)關(guān)系:

將式(2)與式(4)代入式(5),可得AUV速度與工作效率的對(duì)應(yīng)關(guān)系

AUV在靜態(tài)環(huán)境下勻速巡航期間的能耗為

式中:t為航行時(shí)間;L為航行距離。將式(2)、式(6)帶入式(7),得到AUV的總能耗公式為

根據(jù)上式可知,除航行速度與航行距離外,其余參數(shù)均是常數(shù),所以AUV的能量消耗僅與AUV的航行速度和航行距離有關(guān)。
3 基于MFO算法的路徑規(guī)劃
類似于布谷鳥(niǎo)算法和蜂群算法等啟發(fā)式算法,MFO算法是一種基于飛蛾行為的新型啟發(fā)式算法。MFO算法模擬了自然界中飛蛾的導(dǎo)航行為,是一種稱為橫向定位的特殊夜間導(dǎo)航方法[22]。在該算法中,假設(shè)候選解是飛蛾,問(wèn)題的變量是飛蛾在空間中的位置。飛蛾和火焰都是解決方案,它們之間的區(qū)別在于它們?cè)诿看蔚械奶幚砗透路绞健ow蛾是在搜索空間中移動(dòng)的實(shí)際搜索媒介,而火焰是迄今為止獲得的飛蛾的最佳位置。MFO算法結(jié)構(gòu)簡(jiǎn)單,主要依靠對(duì)數(shù)螺旋函數(shù)的飛蛾位置更新機(jī)制、火焰序列的迭代更新和種群數(shù)量的自適應(yīng)機(jī)制來(lái)實(shí)現(xiàn)優(yōu)化。試驗(yàn)表明,MFO在解決受到位置搜索空間約束的問(wèn)題方面比其他啟發(fā)式算法具有明顯優(yōu)勢(shì)。該算法在路徑規(guī)劃中的過(guò)程如下。
3.1 種群初始化
首先,在搜索空間中隨機(jī)生成若干飛蛾的空間位置。在路徑規(guī)劃的任務(wù)空間中,一只飛蛾代表一條初始路徑,所以飛蛾的位置是一個(gè)矩陣向量。根據(jù)AUV的起點(diǎn)和終點(diǎn)信息,沿X軸劃分搜索空間以形成若干個(gè)YOZ平面。根據(jù)啟發(fā)式信息在每個(gè)YOZ平面中隨機(jī)選擇生成下一個(gè)路徑點(diǎn),在滿足避碰的前提下,將所有子路徑點(diǎn)連接產(chǎn)生一條初始路徑。飛蛾的位置矩陣M和所有飛蛾的適應(yīng)度值矩陣OM為
式中:mnb為飛蛾的位置向量,n代表飛蛾種群的飛蛾數(shù)量,b代表飛蛾位置向量的維數(shù);OMn為對(duì)應(yīng)飛蛾n的適應(yīng)度值。將每個(gè)飛蛾的位置向量傳遞給適應(yīng)度函數(shù),并將結(jié)果輸出分配給相應(yīng)的飛蛾作為適應(yīng)度值,構(gòu)成飛蛾適應(yīng)度值矩陣。
火焰矩陣與飛蛾位置矩陣的結(jié)構(gòu)相似,同樣由每個(gè)火焰的位置向量組成。飛蛾充當(dāng)在搜索空間中不停移動(dòng)的搜索單元,而火焰是有史以來(lái)飛蛾搜索到的最佳解,在找到更好的解決方案后,火焰位置就會(huì)更新。火焰適應(yīng)度零值矩陣根據(jù)每個(gè)火焰適應(yīng)度值進(jìn)行排序得到。火焰的位置矩陣F和所有火焰的適應(yīng)度值矩陣OF為
式中:fnb為火焰的位置向量,n代表火焰數(shù)量,b代表火焰位置向量的維數(shù);OFn為對(duì)應(yīng)火焰n的適應(yīng)度值。
用于生成初始路徑的啟發(fā)值由兩部分組成:一部分用來(lái)判斷下一個(gè)點(diǎn)是否可達(dá),即是否符合避碰條件;另一部分用來(lái)計(jì)算下一個(gè)點(diǎn)到當(dāng)前位置的距離與下一個(gè)點(diǎn)到目標(biāo)點(diǎn)的距離之和。這兩個(gè)量的乘積作為啟發(fā)式值得到可行的初始路徑。每條路徑包括21個(gè)子路徑點(diǎn),每個(gè)子路徑點(diǎn)都由Y軸坐標(biāo)和Z軸坐標(biāo)表示,因此每個(gè)飛蛾都是一個(gè)具有42個(gè)維度的列向量。
3.2 位置更新
飛蛾的位置更新機(jī)制是MFO算法的核心部分。飛蛾個(gè)體不斷迭代以更新其在火焰周圍的位置,直到找到最佳解決方案為止,而其數(shù)學(xué)描述又分為撲焰行為和棄焰行為兩部分。
a.撲焰行為
自然界中具有趨光性的飛蛾依靠橫向定位導(dǎo)航機(jī)制向距離最近的光源移動(dòng),其飛行軌跡呈螺線型。選擇數(shù)學(xué)描述如下的對(duì)數(shù)螺旋作為飛蛾的
運(yùn)動(dòng)軌跡:

式中:S(Mi,Fj)為更新后的飛蛾位置,其中Mi為飛蛾位置,F(xiàn)j為光源位置;|Fj?Mi|為飛蛾到火焰的距離;ε為與螺線形狀相關(guān)的常量;τ為隨機(jī)數(shù),取值區(qū)間為[?1,1],τ=?1表示最接近火焰的位置,τ=1表示離火焰最遠(yuǎn)的位置。
b.棄焰行為
MFO算法通過(guò)放棄火焰數(shù)量的機(jī)制來(lái)保持最佳火焰位置,自適應(yīng)地減少火焰數(shù)量的過(guò)程如下所示:

式中:N為初始火焰數(shù)量;σ為當(dāng)前迭代次數(shù);T為最大迭代次數(shù)。在迭代T次之后,火焰數(shù)量為1,即代表所得到的全局最優(yōu)解。
3.3 適應(yīng)度函數(shù)
代價(jià)函數(shù)是計(jì)算飛蛾適應(yīng)度值的適應(yīng)度函數(shù),也是目標(biāo)優(yōu)化函數(shù)。采用式(8)對(duì)每個(gè)柵格內(nèi)航行的能耗進(jìn)行求和得到總能耗作為代價(jià)函數(shù)。
從式(8)可以知道,AUV在自身航行速度范圍內(nèi)的速度越高,其能耗越低,因此假定AUV以期望航速2.5 m/s(最大速度)做勻速航行。在海流環(huán)境中,AUV的實(shí)際速度是最大靜態(tài)水流速度與AUV航行方向上的速度之和,可由下式計(jì)算:

式中:Ve為期望航速矢量;Vc為海流流速矢量,由式(1)獲得;cos(Ve,Vc)為Ve與Vc之間的夾角余弦值。最終將v帶入式(8)得到AUV的總能耗。
4 仿真試驗(yàn)
本文重點(diǎn)研究在海流影響下的復(fù)雜海洋環(huán)境中AUV的全局路徑規(guī)劃問(wèn)題。為了驗(yàn)證該方法在AUV路徑規(guī)劃中的優(yōu)越性,在Matlab R2016b軟件平臺(tái)上設(shè)計(jì)了一系列仿真試驗(yàn)。首先整個(gè)規(guī)劃空間 為21 km×21 km×20 km,分 為21×21×20個(gè)獨(dú)立網(wǎng)格。AUV的初始位置坐標(biāo)是(1,10,4),目標(biāo)位置坐標(biāo)是(21,8,5),由于AUV的體積與空間相比可忽略不計(jì),因此將其視為空間中的質(zhì)點(diǎn)。設(shè)定飛蛾火焰算法的基本參數(shù)分別為:飛蛾種群數(shù)量100,最大迭代次數(shù)3000。與同等條件下蟻群優(yōu)化算法(ACA)算法的三維路徑規(guī)劃結(jié)果作對(duì)比。
4.1 靜態(tài)環(huán)境
第一種情況是在由深度數(shù)據(jù)得到的靜態(tài)地形障礙環(huán)境下規(guī)劃從起點(diǎn)到終點(diǎn)的路徑。在這種情況下,不考慮海流對(duì)AUV的影響,并且假定AUV在整個(gè)航行過(guò)程中速度保持恒定不變。根據(jù)式(8)可知,此時(shí)AUV的能量消耗僅與路徑長(zhǎng)度有關(guān),因此將所規(guī)劃路徑的長(zhǎng)度用作目標(biāo)優(yōu)化函數(shù),距離最短的路徑即是能量消耗最低的路徑。圖3是MFO算法在靜態(tài)水環(huán)境中的路徑規(guī)劃結(jié)果,圖4是ACA算法在靜態(tài)水環(huán)境中的路徑規(guī)劃結(jié)果。MFO算法與ACA算法的基本參數(shù)設(shè)定和結(jié)果如表1所示。
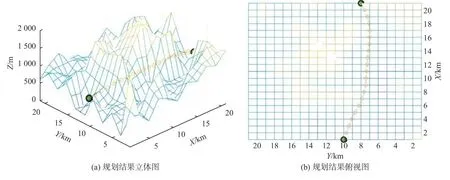
圖3 靜態(tài)環(huán)境下MFO算法路徑規(guī)劃Fig. 3 Path planning in static environment using MFO algorithm

圖4 靜態(tài)環(huán)境下ACA算法路徑規(guī)劃Fig.4 Path planning in static environment using ACA algorithm
從表1可知,雖然MFO算法搜索用時(shí)較ACA算法長(zhǎng),但是由于AUV全局路徑規(guī)劃對(duì)實(shí)時(shí)性要求不高,故可以滿足全局路徑規(guī)劃的需要。
從圖3和圖4的比較可以看出,MFO算法所規(guī)劃的路徑是十分平滑的。由于ACA算法中螞蟻單元的運(yùn)動(dòng)規(guī)則使螞蟻只能在整數(shù)坐標(biāo)點(diǎn)之間運(yùn)動(dòng),導(dǎo)致ACA算法規(guī)劃獲得的路徑不是全局最優(yōu)解。由于MFO算法中飛蛾獨(dú)特的位置更新機(jī)制,使該算法可以探索空間中的任何點(diǎn),這滿足了AUV對(duì)平滑路徑的需求。

表1 規(guī)劃算法的參數(shù)設(shè)定與結(jié)果Tab.1 Parameter settings and results of planning algorithm
圖5為MFO算法和ACA算法的適應(yīng)值曲線。可以看出,MFO算法的適應(yīng)度值在開(kāi)始時(shí)會(huì)很快收斂,收斂速度在經(jīng)過(guò)200次迭代后會(huì)逐漸變緩,最終在迭代1000次左右時(shí)收斂到全局最優(yōu)值。ACA的適應(yīng)值呈階梯狀變化,在前200次迭代中迅速收斂,在200次后陷入局部最優(yōu),之后很長(zhǎng)時(shí)間不再變化。ACA的最終適應(yīng)度值比MFO算法的最終適應(yīng)度值高得多,這主要因?yàn)锳CA算法通常會(huì)進(jìn)入局部最優(yōu)狀態(tài),很難逃脫。而MFO算法的強(qiáng)大之處在于其出色的全局優(yōu)化能力。由于MFO算法中的火焰會(huì)保留每個(gè)飛蛾的最佳位置,因此飛蛾永遠(yuǎn)不會(huì)失去其最佳搜索結(jié)果。隨著搜索次數(shù)的增加,飛蛾適應(yīng)度值將逐漸收斂到最優(yōu)值,而不會(huì)陷入局部最優(yōu)解中,這些功能在AUV全局路徑規(guī)劃中非常有用。盡管MFO算法需要更多的運(yùn)行時(shí)間和更長(zhǎng)的迭代時(shí)間,但是由于全局計(jì)劃對(duì)實(shí)時(shí)性需求不強(qiáng),因此該算法非常適合AUV全局路徑規(guī)劃。
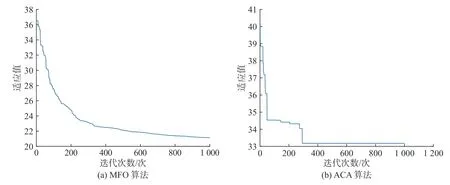
圖5 適應(yīng)值曲線Fig.5 Adaptation value curve
4.2 海流環(huán)境
第二種情況是AUV在海流環(huán)境中從起點(diǎn)到終點(diǎn)的路徑規(guī)劃。在這種情況下,不僅應(yīng)考慮地形障礙,還要考慮海流對(duì)AUV的影響。此時(shí),AUV在不同柵格內(nèi)的速度將發(fā)生變化。AUV的實(shí)際速度根據(jù)式(13)求得,代入式(8)得到總能耗作為代價(jià)函數(shù)。仿真結(jié)果如圖6、圖7所示,在20次仿真試驗(yàn)中,路徑規(guī)劃所需的平均時(shí)間為10.6 s。
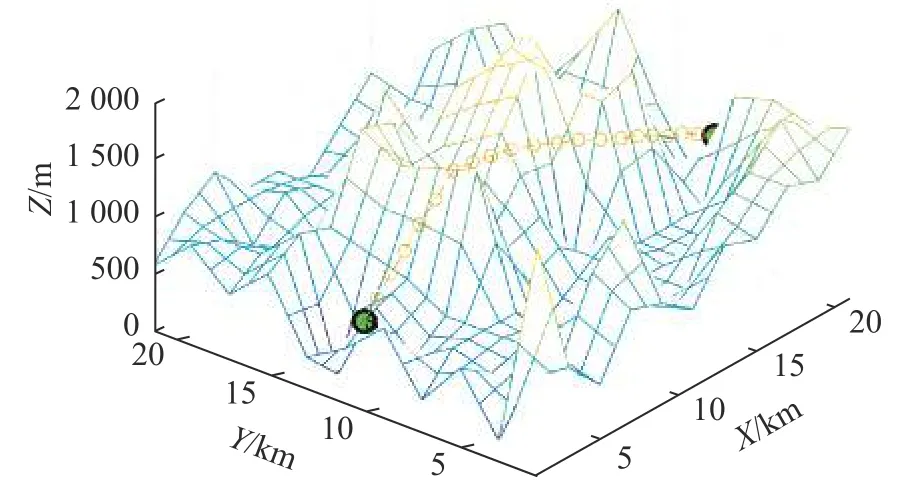
圖6 MFO算法海流環(huán)境下路徑規(guī)劃Fig.6 Path planning in ocean current environment using MFO algorithm
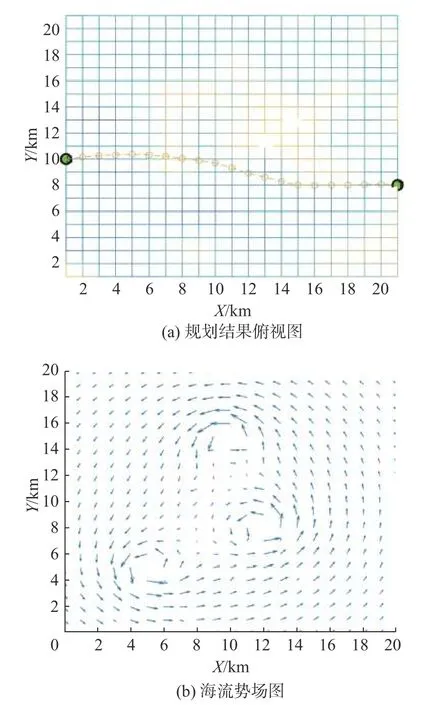
圖7 MFO算法規(guī)劃俯視圖與相關(guān)海流場(chǎng)Fig.7 Plan top view and related currents field using MFO algorithm
如圖7所示,MFO算法所規(guī)劃路徑盡可能避免了逆流對(duì)AUV的減速作用,并充分利用了順流對(duì)AUV的加速作用,獲得了最低能耗代價(jià)的路徑,其全局優(yōu)化能力十分優(yōu)異。試驗(yàn)證明,MFO算法在路徑規(guī)劃中表現(xiàn)出色。
5 結(jié) 論
研究了三維水下環(huán)境中AUV全局路徑規(guī)劃問(wèn)題。綜合考慮了海流和地形障礙的影響,建立了由AUV靜態(tài)能耗模型和海流影響下能耗模型的綜合能耗優(yōu)化目標(biāo)函數(shù),將MFO算法應(yīng)用在解決路徑規(guī)劃的非線性優(yōu)化問(wèn)題中。仿真結(jié)果表明,MFO算法在全局搜索尋找最優(yōu)解時(shí)有出色表現(xiàn),不會(huì)因過(guò)早收斂陷入局部最優(yōu),證明了該方法的可行性和實(shí)用性。盡管具有上述優(yōu)點(diǎn),但仍有許多現(xiàn)實(shí)因素需要考慮。例如,本文中使用的海流模型相對(duì)簡(jiǎn)單,沒(méi)有考慮時(shí)變海流等復(fù)雜情況。將來(lái)仍然需要對(duì)這些問(wèn)題進(jìn)行進(jìn)一步的研究。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國(guó)石油石化(2021年9期)2021-07-17 09:24:00
中國(guó)農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41