采取階段性改進(jìn)的全新ViBe目標(biāo)檢測(cè)算法
2021-06-03 02:22:54涂偉強(qiáng)李炎炎陳金戈
涂偉強(qiáng), 李炎炎, 龍 偉, 陳金戈, 丁 偉
(四川大學(xué)機(jī)械工程學(xué)院, 成都 610065)
1 引 言
隨著計(jì)算機(jī)技術(shù)的高速發(fā)展,運(yùn)動(dòng)目標(biāo)檢測(cè)在智能監(jiān)控、智能交通、航空航海等領(lǐng)域得到了廣泛應(yīng)用,其檢測(cè)效果是后續(xù)目標(biāo)行為分析、目標(biāo)追蹤的關(guān)鍵. 目前,運(yùn)動(dòng)目標(biāo)檢測(cè)算法主要分為三大類:光流法[1-2]、幀差法[3-4]和背景差分法[5-7]. 光流法是在其對(duì)應(yīng)的矢量場(chǎng)中,根據(jù)背景與前景目標(biāo)像素點(diǎn)的速度矢量不同而檢測(cè)出運(yùn)動(dòng)目標(biāo).但這種方法計(jì)算量較大、處理時(shí)間長(zhǎng),難以達(dá)到實(shí)時(shí)性的要求. 幀差法是利用連續(xù)m幀圖像差分獲得檢測(cè)目標(biāo),其原理簡(jiǎn)單且實(shí)時(shí)性好,但只能檢測(cè)出運(yùn)動(dòng)目標(biāo)的邊界信息,導(dǎo)致獲得的目標(biāo)不完整,并且不適應(yīng)背景變化較大的場(chǎng)景. 背景差分法則同時(shí)具備實(shí)時(shí)性、準(zhǔn)確性以及簡(jiǎn)單性等特點(diǎn),可以從視頻序列圖像中提取出較完整的運(yùn)動(dòng)目標(biāo).
由于傳統(tǒng)的背景差分法建立背景模型耗費(fèi)時(shí)間較長(zhǎng),占用內(nèi)存較大. 因此,Barnich等人在2009年提出了視覺(jué)背景提取模型 (Visual Background extractor, ViBe) 建模方法[8]. ViBe算法是一種像素級(jí)圖像背景建模或前景檢測(cè)的算法,該算法將隨機(jī)機(jī)制應(yīng)用到背景模型的建立和更新中,使得背景模型中每個(gè)像素值的樣本值更加符合實(shí)際分布.由于不需要假設(shè)復(fù)雜的概率模型,故檢測(cè)精度高、實(shí)時(shí)性好、內(nèi)存占用少.另外算法簡(jiǎn)單易實(shí)現(xiàn),使得檢測(cè)效率大大提升. 但是,該算法也存在鬼影[9]、目標(biāo)檢測(cè)不完整[10]等問(wèn)題. 針對(duì)鬼影問(wèn)題,文獻(xiàn)[11]提出一種基于ViBe和三幀差法的目標(biāo)檢測(cè)算法,在背景模型更新過(guò)程中加入?yún)⒖紟槊總€(gè)像素點(diǎn)設(shè)置更新因子λ(x,y).由于ViBe算法檢測(cè)過(guò)程中三幀差法需同時(shí)對(duì)目標(biāo)進(jìn)行檢測(cè),運(yùn)算量明顯加大,因此,不能滿足實(shí)時(shí)性要求. 文獻(xiàn)[12]采用一種基于信息度對(duì)圖像進(jìn)行分塊,同時(shí)結(jié)合混合高斯的運(yùn)動(dòng)檢測(cè)算法,使得該算法計(jì)算量大大減少,從而占用時(shí)長(zhǎng)減少,但是運(yùn)動(dòng)目標(biāo)存在大量的空洞. 文獻(xiàn)[13]增加了鬼影抑制模塊,通過(guò) OTSU 算法計(jì)算出最適合當(dāng)前幀的分割閾值,在傳統(tǒng) ViBe 算法基礎(chǔ)上再對(duì)前景像素點(diǎn)進(jìn)行二次判別.該方法能夠很好地適應(yīng)前景目標(biāo)運(yùn)動(dòng)變化較大的情況,更好地抑制鬼影現(xiàn)象,同時(shí)保持較高較穩(wěn)定的檢測(cè)率.
本文針對(duì)ViBe算法傳統(tǒng)建模方法的缺陷提出利用前m幀視頻序列來(lái)構(gòu)建背景模型;針對(duì)ViBe算法中固定參數(shù)影響檢測(cè)精度問(wèn)題,提出擴(kuò)大樣本選取鄰域數(shù)量、自適應(yīng)調(diào)整匹配半徑以及背景更新因子方法;其次提出在目標(biāo)檢測(cè)階段通過(guò)獲取的最佳圖像分割閾值對(duì)前景像素進(jìn)行二次判別.
2 ViBe算法原理介紹與分析
ViBe算法是2009年由Barnich等提出的一種背景建模方法[8],該算法采用鄰域像素來(lái)創(chuàng)建背景模型,通過(guò)比對(duì)背景模型和當(dāng)前輸入像素值來(lái)檢測(cè)前景,整個(gè)過(guò)程如圖1所示.
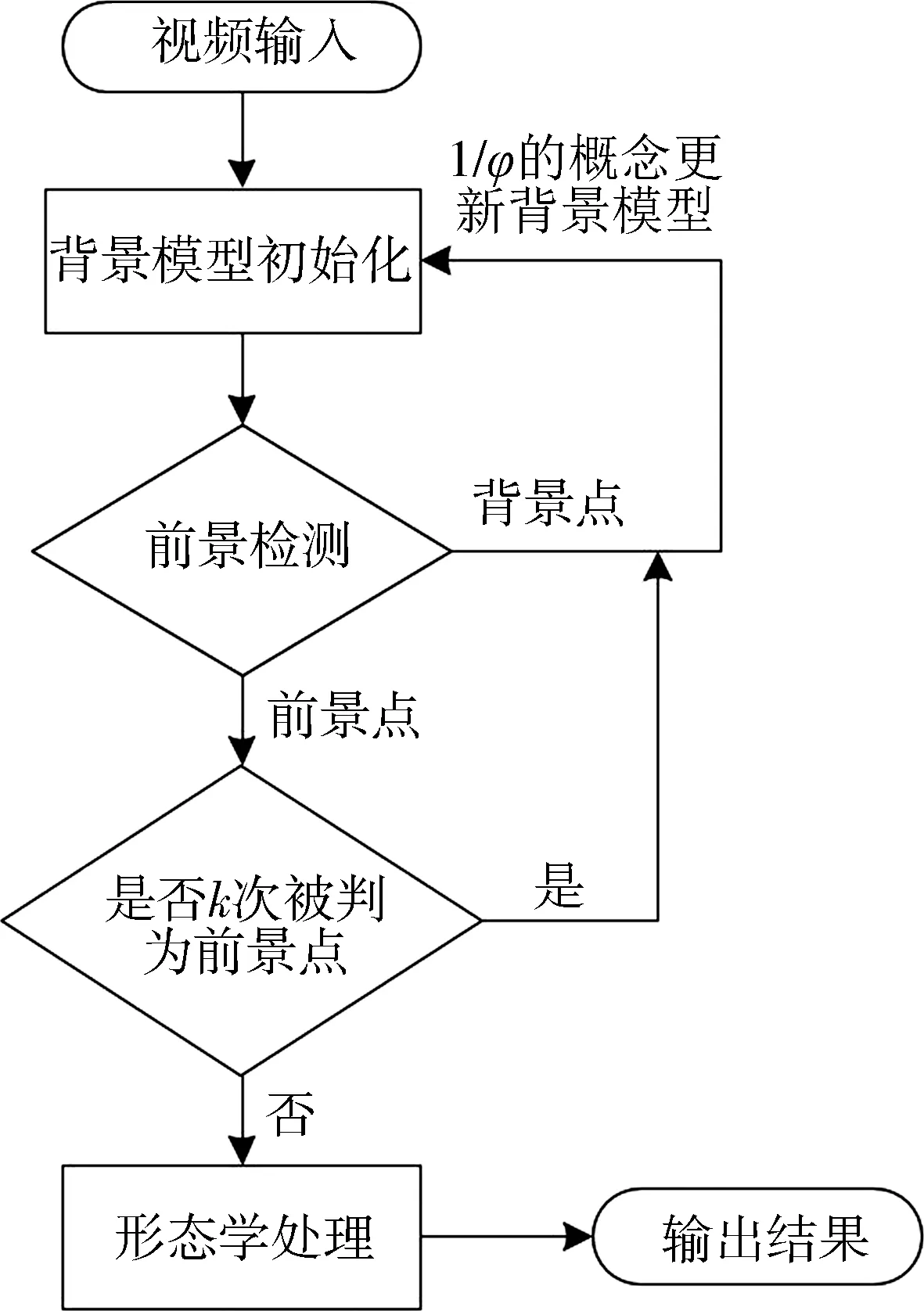
圖1 ViBe算法的基礎(chǔ)流程圖
從圖1可看出,ViBe算法大致可分為模型初始化、目標(biāo)檢測(cè)以及背景模型更新三個(gè)主要階段.
2.1 模型初始化
一般的運(yùn)動(dòng)目標(biāo)檢測(cè)算法在初始化背景模型時(shí)是由一定長(zhǎng)度的視頻序列完成,而 ViBe 算法的模型初始化是根據(jù)首幀圖像的情況來(lái)建立背景模型,如圖2所示. 圖2(a)為某視頻序列的首幀畫(huà)面;圖2(b)表示在像素點(diǎn)x的8鄰域中進(jìn)行隨機(jī)采樣n個(gè)樣本,且圖中Nx為x點(diǎn)處的其中一個(gè)鄰域;圖2(c)為當(dāng)前像素點(diǎn)x的樣本集S(x) = {P1,P2,P3,……,Pn}. 所有像素點(diǎn)的樣本集構(gòu)成了初始化的背景模型.
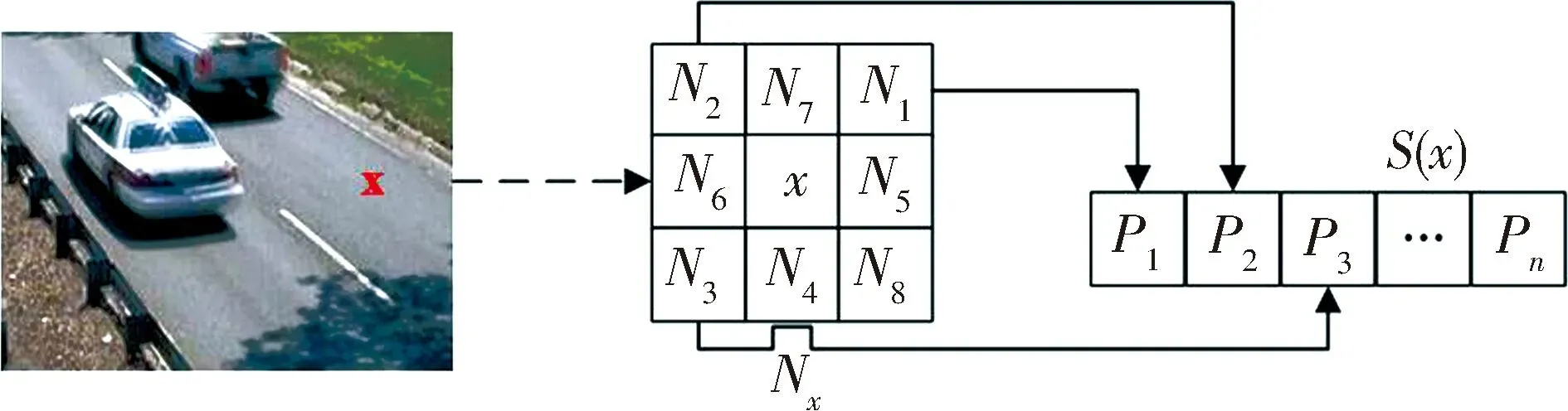
(a) (b) (c)圖2 ViBe背景模型Fig.2 ViBe background model
2.2 目標(biāo)檢測(cè)
前景檢測(cè)是ViBe算法中較為關(guān)鍵的環(huán)節(jié)之一,它通過(guò)比較新的像素值與對(duì)應(yīng)樣本集來(lái)判斷新的采樣點(diǎn)是否為前景點(diǎn). 背景模型中每個(gè)像素點(diǎn)x都存儲(chǔ)了一個(gè)像素樣本集P(x),計(jì)算新的像素值與樣本集中每個(gè)像素值的距離,如果該距離小于設(shè)定的半徑參數(shù),則對(duì)應(yīng)像素點(diǎn)的近似樣本數(shù)增加;如果近似樣本數(shù)小于規(guī)定的閾值,則判定該像素點(diǎn)屬于前景點(diǎn). 檢測(cè)過(guò)程主要由三個(gè)參數(shù)決定:樣本集數(shù)目n,閾值#min和半徑參數(shù)R,圖3參數(shù)設(shè)置為n=20,#min=2,R=20.
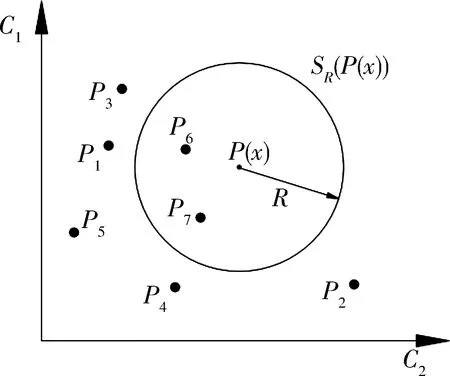
圖3 二維歐氏顏色空間分類示意圖
圖3中,P(x)為新圖像幀的像素值;R為預(yù)先設(shè)定的半徑參數(shù);P1、P2、P3、……為樣本集S(x)中的像素值. 圖中以P(x)為圓心,R為半徑的圓被定義為一個(gè)集合SR(P(x)),S(x)與SR(P(x))的交集為新像素點(diǎn)的近似樣本數(shù) (近似樣本數(shù)越少,新像素點(diǎn)判定為前景點(diǎn)的可能性愈大). 因此,閾值#min和半徑參數(shù)R與模型的靈敏度成正相關(guān),可適當(dāng)調(diào)整#min、R的值來(lái)改變模型的靈敏度.
2.3 背景更新策略
背景模型的更新目的是使其可以不斷適應(yīng)外界環(huán)境的變化,例如光照的變化、背景物體的變化等,其中保守更新與前景點(diǎn)計(jì)數(shù)更新是背景更新的主要更新策略. 保守更新策略規(guī)定前景點(diǎn)不能填充背景模型,由此可能導(dǎo)致死鎖現(xiàn)象出現(xiàn).例如在模型初始化時(shí)如果一塊靜止的區(qū)域被錯(cuò)誤的檢測(cè)為運(yùn)動(dòng)區(qū)域,那么在這種策略下該運(yùn)動(dòng)區(qū)域?qū)⒂肋h(yuǎn)被當(dāng)作前景目標(biāo)來(lái)對(duì)待.而前景點(diǎn)計(jì)數(shù)更新策略則是假設(shè)某個(gè)像素點(diǎn)連續(xù)K次被判定為前景時(shí),將判定更新該像素點(diǎn)為背景像素點(diǎn). 而ViBe算法的更新策略則是保守更新策略與前景點(diǎn)計(jì)數(shù)相結(jié)合. 該策略規(guī)定每一個(gè)被檢測(cè)為背景點(diǎn)的像素點(diǎn)都有1/φ的概率更新它本身的模型樣本值,同時(shí)更新鄰點(diǎn)樣本值的概率也是1/φ. 另外當(dāng)前景點(diǎn)計(jì)數(shù)達(dá)到閾值時(shí)也將更新為背景點(diǎn),并有1/φ的概率去更新它本身的模型樣本值.
筆者針對(duì)事故車輛類型、事故發(fā)生時(shí)間段、肇事人年齡段、性別、是否酒駕、是否持駕照、是否本人車輛、肇事時(shí)間和肇事次數(shù)等指標(biāo)對(duì)事故中的車和人進(jìn)行詳細(xì)分析,從事故發(fā)生根源入手,分析事故發(fā)生原因,從而為預(yù)防事故的措施出臺(tái)提供可靠理論基礎(chǔ)。
3 基于ViBe的目標(biāo)檢測(cè)算法改進(jìn)
3.1 模型初始化階段
首先,針對(duì)建模方式選擇問(wèn)題,由于在真實(shí)場(chǎng)景下,往往第一幀圖像中是否存在運(yùn)動(dòng)物體對(duì)背景建模會(huì)產(chǎn)生極大的影響. 因此,采用前m幀視頻序列對(duì)應(yīng)像素點(diǎn)的均值構(gòu)建背景模型,即通過(guò)計(jì)算對(duì)應(yīng)各個(gè)像素點(diǎn)的平均值來(lái)構(gòu)造一個(gè)虛擬背景,并以此背景為基礎(chǔ)來(lái)建立背景模型,從而使建立的背景模型更加符合理想模型. 其中,式(1)用來(lái)計(jì)算虛擬背景中每一個(gè)點(diǎn)的像素值.
(1)
式中,Va(x,y)為平均像素值;Vi(x,y)為第i幀像素值.
其次,在樣本選取過(guò)程中,ViBe算法所采用的鄰域數(shù)目較少,所需樣本值個(gè)數(shù)明顯多于鄰域個(gè)數(shù),在單一鄰域中出現(xiàn)集中采樣,使得重復(fù)采樣的概率增大. 為有效解決上述問(wèn)題,將原先的8鄰域改為24鄰域進(jìn)行樣本選取,降低樣本選取的集中性,提高背景模型的精確度. 此外當(dāng)像素點(diǎn)x處于圖像邊界時(shí),傳統(tǒng)策略會(huì)導(dǎo)致分類的準(zhǔn)確性降低,因此采用一種新型邊界采樣策略,使得邊界像素點(diǎn)的采樣值更加準(zhǔn)確,如圖4所示.
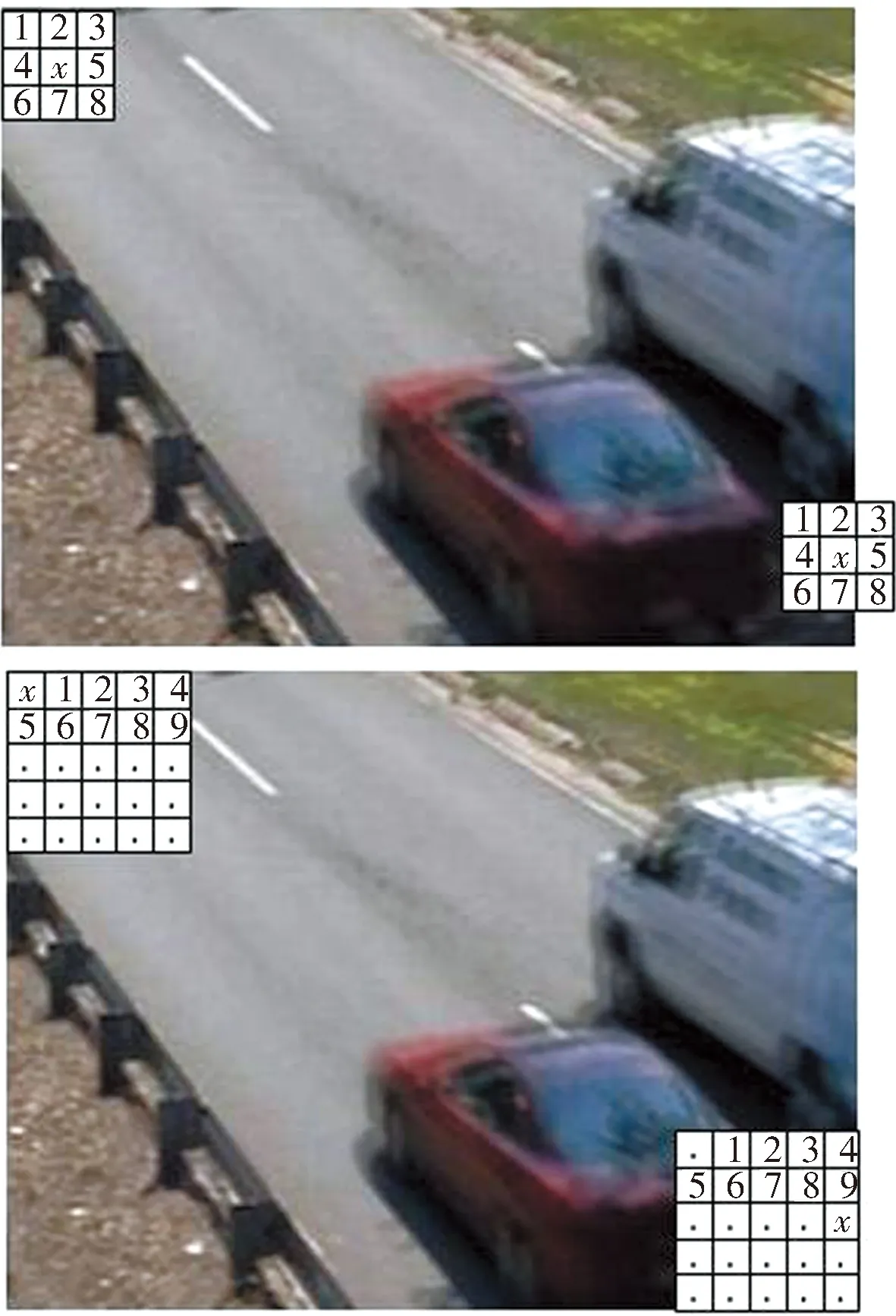
圖4 邊界采樣策略對(duì)比圖
最后,在檢測(cè)過(guò)程中相關(guān)參數(shù)對(duì)像素檢測(cè)的精確度也有一定影響,為改善此影響,根據(jù)背景模型的變化程度以及檢測(cè)目標(biāo)的運(yùn)動(dòng)速度動(dòng)態(tài)調(diào)整原ViBe算法中固定的匹配半徑,使獲得的背景模型更加符合實(shí)際模型.
3.2 目標(biāo)檢測(cè)階段
為了提高算法的容錯(cuò)率,引入最大類間方差法[14]來(lái)計(jì)算當(dāng)前幀的最佳分割閾值[15],對(duì)前景像素進(jìn)行二次判別,從而提高像素判別的正確率. 其中最大類間方差法(OTSU),是一種基于全局二值化的自適應(yīng)閾值[16]確定方法,依據(jù)圖像的灰度特性獲取圖像的最佳分割閾值,并根據(jù)最佳分割閾值將當(dāng)前圖像分為背景和前景兩個(gè)部分. 當(dāng)取最佳閾值時(shí),上述部分之間的差別達(dá)到最大,也就意味著目標(biāo)與背景被錯(cuò)誤分辨的概率降到了最低(錯(cuò)分概率最小[17]).
3.3 背景更新階段
根據(jù)背景變化快慢程度,采用動(dòng)態(tài)調(diào)整更新因子大小的方法. 從圖1可看出,φ值與背景模型的更新速率Vu成反比. 因此,引入了幀間均速測(cè)量值ΔV來(lái)衡量運(yùn)動(dòng)目標(biāo)的運(yùn)動(dòng)速度,使得φ能夠自適應(yīng)地調(diào)整自身值的大小. 其中,幀差測(cè)量值ΔV表示前后幀同一個(gè)運(yùn)動(dòng)物體質(zhì)心間的平均移動(dòng)速度.
(2)
式中,di為當(dāng)前圖像與前一個(gè)圖像對(duì)應(yīng)運(yùn)動(dòng)物體的相對(duì)質(zhì)心差;f為待統(tǒng)計(jì)的幀數(shù).
這里根據(jù)ΔV將更新因子劃分為3個(gè)等級(jí),即
(3)
σ1、σ2的選取是根據(jù)當(dāng)前視頻的實(shí)際情況給出,一般情況下,取σ1= 2,σ2=8.
最后,經(jīng)過(guò)形態(tài)學(xué)圖像處理,清除檢測(cè)時(shí)出現(xiàn)的孔洞以及一些輕微閃爍點(diǎn).算法流程見(jiàn)圖5.
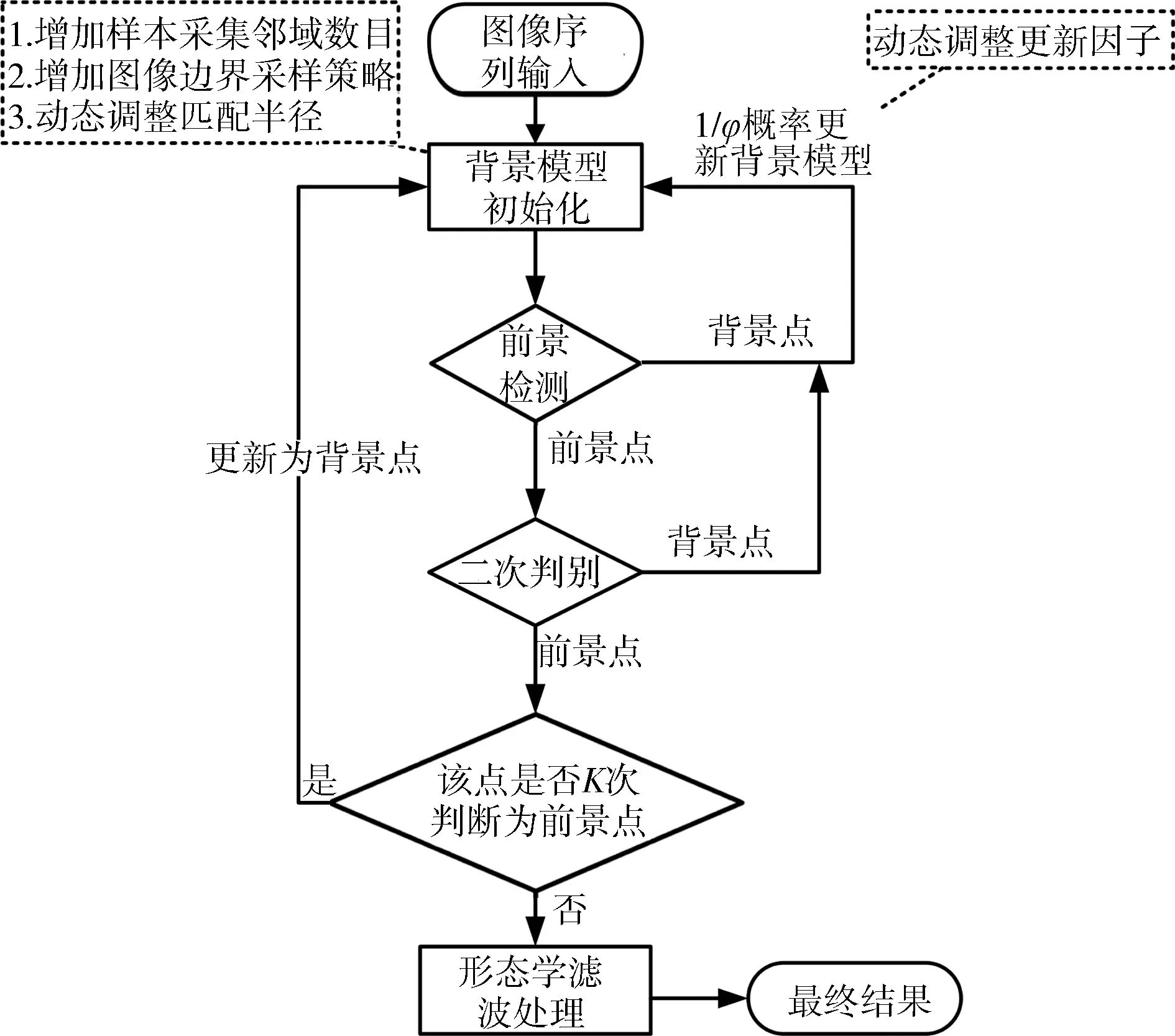
圖5 改進(jìn)ViBe算法流程圖Fig.5 Flow chart of the improved ViBe algorithm
4 實(shí)驗(yàn)結(jié)果與分析
為了驗(yàn)證本文算法對(duì)鬼影和目標(biāo)不完整現(xiàn)象的抑制效果,選用兩組視頻序列對(duì)原ViBe算法與改進(jìn)的ViBe算法進(jìn)行對(duì)比試驗(yàn). 試驗(yàn)運(yùn)行環(huán)境:Win10 64位操作系統(tǒng);處理器為:Intel(R) Core(TM) i5-5200U CPU;內(nèi)存為:4.00 GB;軟件算法平臺(tái):MATLAB 2016b、VS2019、OpenCV 4.0.設(shè)置的起始參數(shù)為:背景樣本數(shù)n=20,似樣本數(shù)規(guī)定的閾值#min=2,匹配半徑參數(shù)R=20,更新概率λ=16.
4.1 結(jié)果試驗(yàn)
鬼影抑制試驗(yàn)選自Change Detection數(shù)據(jù)集中 Highway視頻序列以及PETS2006視頻序列. 其中Highway視頻序列初始幀為第950幀,PETS2006視頻序列初始幀為第40幀.
圖6為Highway視頻序列實(shí)驗(yàn)檢測(cè)結(jié)果,圖 6(a)為第980幀原圖,圖6(b)為ViBe算法檢測(cè)結(jié)果,結(jié)果顯示經(jīng)ViBe算法檢測(cè)的視頻序列有明顯的鬼影現(xiàn)象存在;圖6(c)為本文算法檢測(cè)結(jié)果,可以看到此時(shí)鬼影現(xiàn)象已經(jīng)消除,目標(biāo)完整度得到極大提高,但仍存在少量噪聲點(diǎn);圖6(d)為真實(shí)前景. 通過(guò)ViBe算法處理的圖像序列在1 019幀左右鬼影才消失.

(a) 原始圖像

(b) ViBe算法

(c) 本文算法
(d) 理想檢測(cè)圖
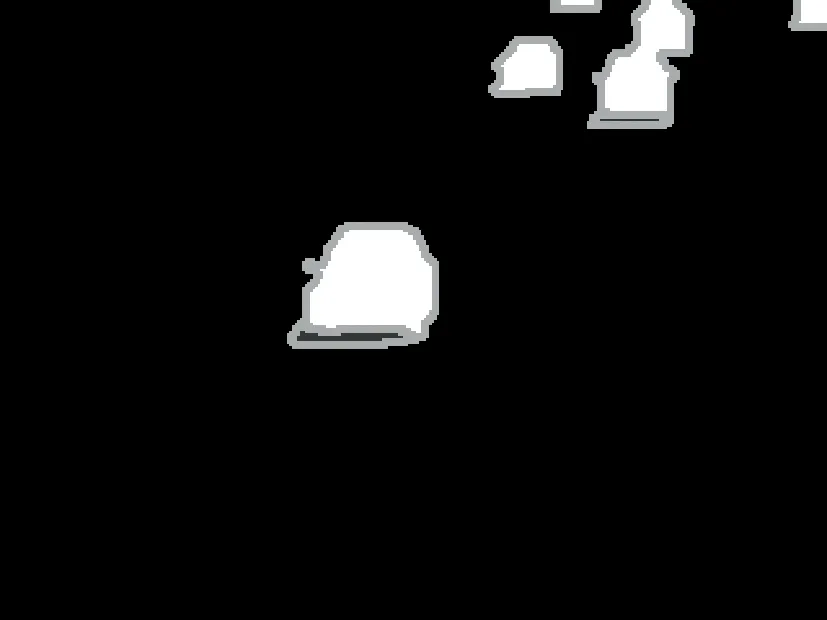
圖7為PETS2006視頻序列實(shí)驗(yàn)結(jié)果.圖7(a)為第75幀原圖.圖7(b)為ViBe算法檢測(cè)圖.檢測(cè)結(jié)果顯示有明顯的鬼影現(xiàn)象存在,并且目標(biāo)檢測(cè)結(jié)果顯示不是較完整.圖7(c)為本文算法檢測(cè)結(jié)果,可以看到此時(shí)鬼影現(xiàn)象已經(jīng)消除.其實(shí)檢測(cè)過(guò)程中鬼影只存在極短時(shí)間就已消失,且經(jīng)過(guò)形態(tài)學(xué)處理之后幾乎不存在噪聲點(diǎn),且目標(biāo)更加完整.圖7(d)為真實(shí)前景. 通過(guò)ViBe算法處理的圖像序列在120幀左右時(shí)鬼影仍然存在,大大降低了目標(biāo)檢測(cè)的準(zhǔn)確性,給后續(xù)目標(biāo)追蹤、目標(biāo)行為分析造成了極大的困難.

(a) 原始圖像
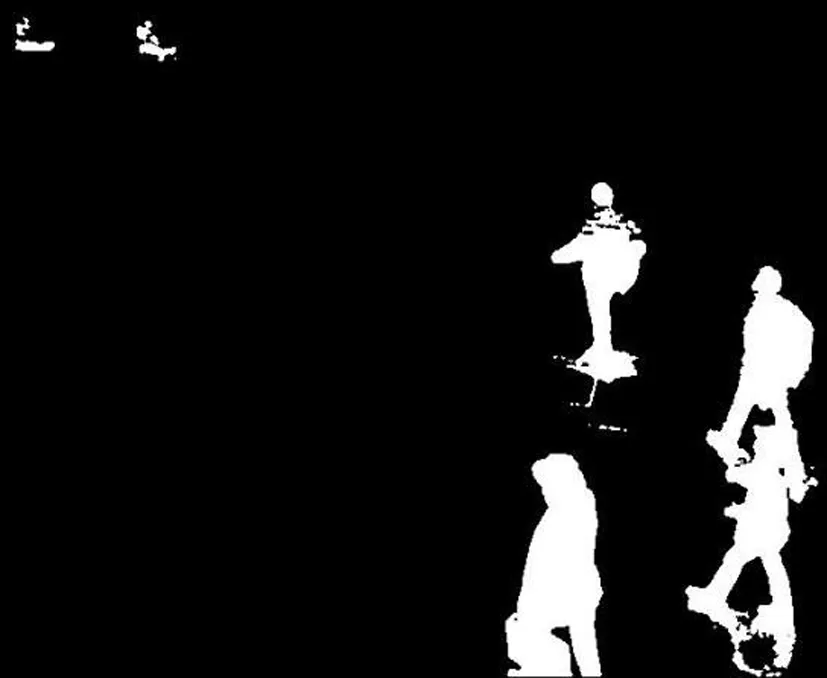
(b) ViBe算法
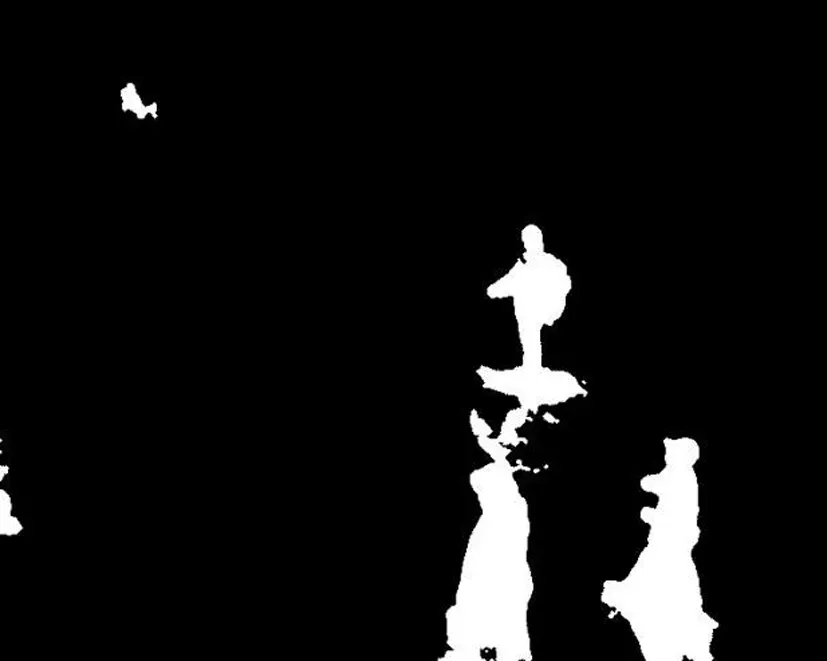
(c) 本文算法
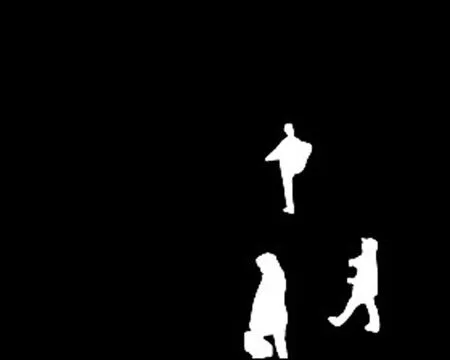
(d) 理想檢測(cè)圖
4.2 性能分析
為了定量分析本文算法與原ViBe算法的性能優(yōu)劣,本文分別用兩種不同評(píng)價(jià)指標(biāo)從不同角度對(duì)兩種算法性能進(jìn)行評(píng)估.
首先,借鑒文獻(xiàn)[18]中采用的PCC指標(biāo)對(duì)算法進(jìn)行性能評(píng)估,其中公式為
(4)
其中,TP和TN分別表示正確檢測(cè)到的前景像素的個(gè)數(shù)和背景像素的個(gè)數(shù);FN和FP分別表示誤判的前景像素的個(gè)數(shù)和背景像素的個(gè)數(shù).
利用上述評(píng)判標(biāo)準(zhǔn)對(duì)本文使用的兩組視頻序列進(jìn)行分析,表1為兩種算法處理本文視頻序列得到的結(jié)果(PCC數(shù)值愈接近100%,則算法檢測(cè)性能愈好).
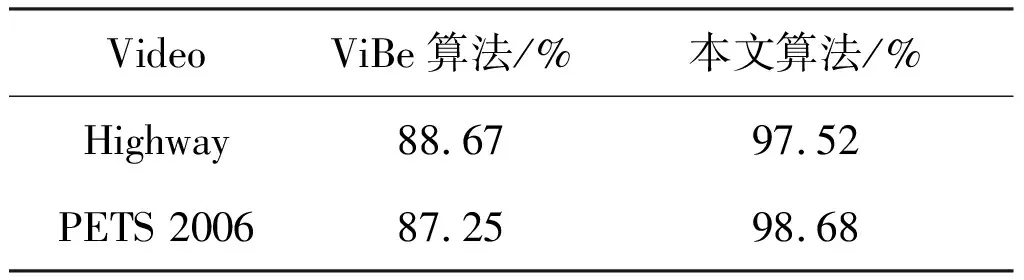
表1 ViBe算法改進(jìn)前后PCC 對(duì)比
然后,為了檢驗(yàn)算法處理視頻序列的實(shí)時(shí)性,分別統(tǒng)計(jì)了兩種算法在兩組視頻中的平均幀率,最終的統(tǒng)計(jì)結(jié)果如表2所示.
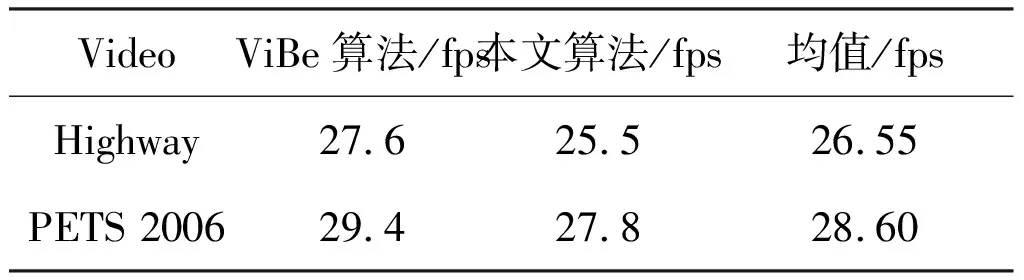
表2 平均幀率統(tǒng)計(jì)結(jié)果
綜合表1和表2的實(shí)驗(yàn)數(shù)據(jù)可以明顯看出,像素點(diǎn)的檢測(cè)準(zhǔn)確率得到大幅度提升,但本文算法的處理速度則略低于原ViBe 算法,不過(guò)處理視頻序列的速度還是在可接受的范圍內(nèi),不影響實(shí)時(shí)檢測(cè)視頻的需求.
本文針對(duì)ViBe算法的不足進(jìn)行了改進(jìn).首先,采用前m幀均值構(gòu)建背景模型,解決了首幀圖像存在運(yùn)動(dòng)目標(biāo)所造成的鬼影問(wèn)題,提高了背景模型的準(zhǔn)確性. 其次為了降低樣本集重復(fù)選取的概率,增加了樣本選取鄰域數(shù)目,同樣使得背景建模更加準(zhǔn)確. 根據(jù)背景變化程度以及變化的速度,動(dòng)態(tài)調(diào)整匹配半徑和背景更新因子. 然后通過(guò)引入最大類間方差法計(jì)算當(dāng)前幀的最優(yōu)分割閾值,對(duì)前景點(diǎn)進(jìn)行二次判別提高前景點(diǎn)的檢測(cè)準(zhǔn)確率,達(dá)到快速消除鬼影效果. 最后,對(duì)圖像進(jìn)行形態(tài)學(xué)濾波處理,使提取的運(yùn)動(dòng)目標(biāo)區(qū)域更加完整. 改進(jìn)算Change Detection公共數(shù)據(jù)集上進(jìn)行了試驗(yàn),與原ViBe運(yùn)動(dòng)目標(biāo)檢測(cè)算法進(jìn)行比較. 試驗(yàn)結(jié)果表明,改進(jìn)算法在滿足實(shí)時(shí)性視頻處理的同時(shí),檢測(cè)精度得到大幅提高,能夠有效去除鬼影. 未來(lái)將進(jìn)一步探索基于深度學(xué)習(xí)的目標(biāo)檢測(cè)算法.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
