基于51單片機的多功能黃瓜蘸花噴藥機設計
2021-06-07 01:37:56王高樂韓祥森
現代信息科技 2021年24期
關鍵詞:單片機
王高樂 韓祥森


摘 ?要:通過對農業黃瓜種植過程中黃瓜蘸花以及種植環境的檢測,制作了一種多功能黃瓜蘸花噴藥機系統,并設計了一種新型黃瓜蘸花噴頭,能夠實現自動檢測,自動噴灑,藥液回收等功能。該系統還搭載了多種環境檢測模塊,利用單片機串口通信將環境檢測參數通過藍牙傳送到手機APP,方便了基層農戶及時了解環境狀況。實驗表明該系統設計的新型噴頭達到了預期效果,環境檢測方面工作穩定,切實幫助了基層農戶的農業管理。
關鍵詞:黃瓜蘸花;單片機;環境檢測;串口通信
中圖分類號:TP391;S126 ? ? ? ? ?文獻標識碼:A文章編號:2096-4706(2021)24-0051-05
Abstract: Through the detection of cucumber flower dipping and planting environment in the process of agricultural cucumber planting, a multifunctional cucumber flower dipping and spraying machine system is made, and a new cucumber flower dipping nozzle is designed, which can realize the functions of automatic detection, automatic spraying, liquid medicine recovery and so on. The system is also equipped with a variety of environmental detection modules. The serial communication of single-chip microcomputer is used to transmit the environmental detection parameters to the mobile phone APP through Bluetooth, which is convenient for grassroots farmers to know the environmental conditions in time. The experiment shows that the new nozzle designed for this system has achieved the expected effect and operation stably in environment detection, which effectively helps the agricultural management of grassroots farmers.
Keywords: cucumber flower dipping; single-chip microcomputer; environmental detection; serial communication
0 ?引 ?言
隨著時代的發展,農業領域也越來越倍受社會關注,一款好用的農用工具往往能推動該領域的發展。在農業黃瓜種植過程中存在黃瓜蘸花工作,對于黃瓜蘸花工作現在市面上沒有成熟的工具,主要以人工蘸花為主,人工蘸花效率低,過程復雜,蘸花藥液易撒濺,容易損害人體皮膚,人員安全性差。人工長時間進行蘸花工作,蘸花人員的胳膊會酸痛腫脹,十分艱苦。市面上現存的工具是一種“c”型噴頭,采用噴灑的方式對黃瓜進行蘸花,導致了有將近80%的藥液稀釋在了空氣中,造成了藥液的浪費并且會對植株葉片和人體皮膚造成損害,“c”型噴頭工具采用機械按鍵,需要人工用力按壓,長時間工作會造成手指酸痛。因此市面上現存的兩種黃瓜蘸花方式存在極大弊端;現階段智慧農業大棚建設飛速發展,智慧農業大棚內搭載多種環境傳感設備,主要對大棚內環境進行檢測,方便工作人員進行管理,對大棚建設要求很高,與此同時帶來的便是造價高昂的建設費用,無法滿足基層農戶對性價比的要求,導致了基層農戶對大棚內環境只能依靠經驗判斷無法準確進行判斷。所以筆者基于我校山東省大學生創新創業訓練項目提出了基于51單片機的多功能黃瓜蘸花噴藥機系統,旨在解決農業生產種植過程中的黃瓜蘸花問題以及種植環境的檢測問題,為我國農業發展貢獻一份力量。
1 ?系統總體設計方案
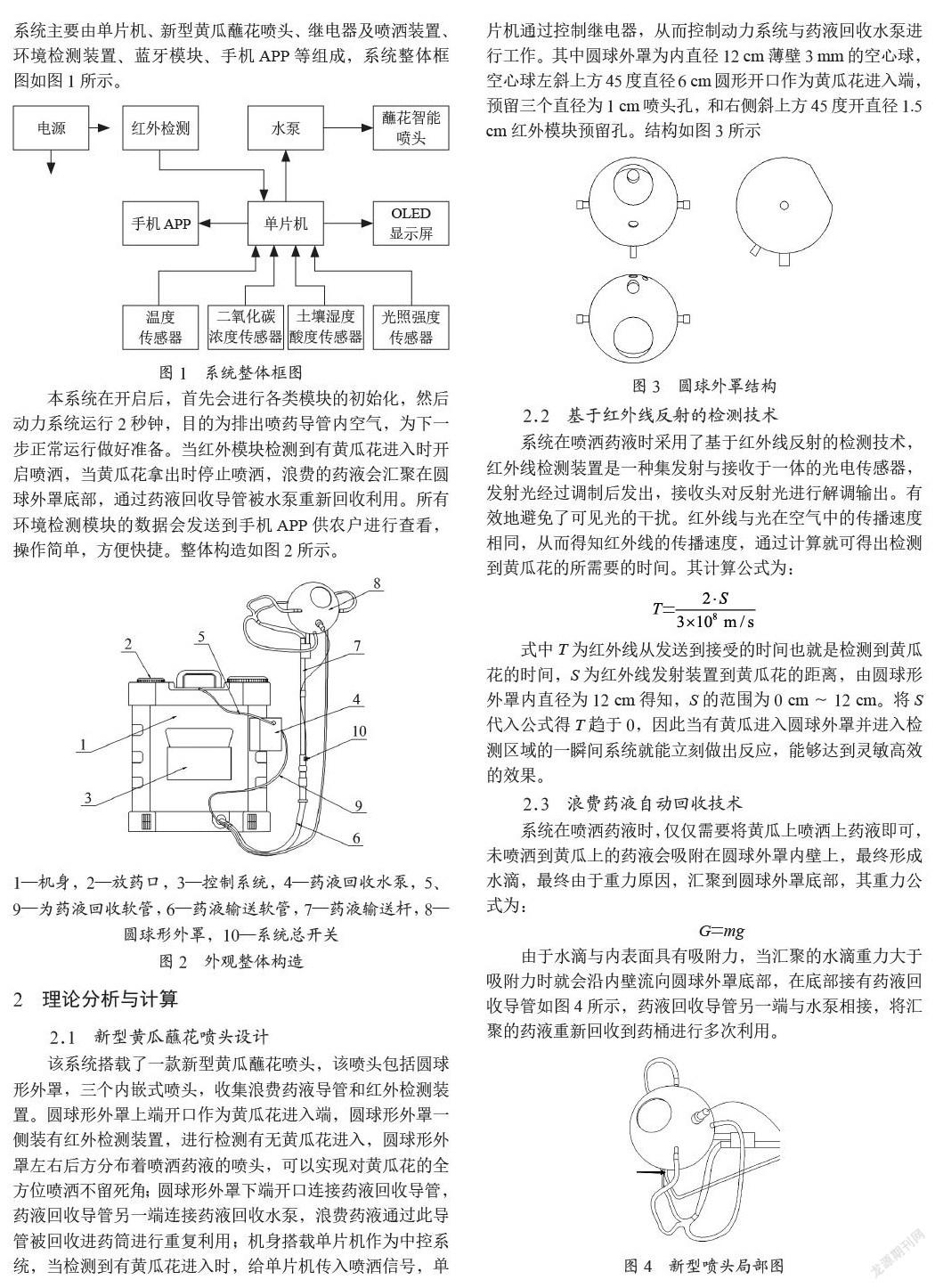
該系統設計了一款新型黃瓜蘸花噴頭,該噴頭采用3D打印技術制作而成,采用PLA材料打印而成,具有輕便兼顧,塑性好等特點。該噴頭采用上方開口式圓形中空外觀,內置三個噴頭,低端留孔接藥液回收導管;控制系統采用51單片機,具體芯片型號為STC12C5A60S2,這款單片機是開源的硬件開發平臺,其因具有處理速度較快,資料多,操作與編程簡單,芯片不容易燒壞,外設豐富等優點被廣泛應用于系統設計中,故采用該單片機作為控制核心。采用單片機控制繼電器模塊從而間接控制水泵工作,繼電器模塊具有價格低廉,靈敏度高,不易損壞等優點;蘸花噴頭內的紅外檢測裝置采用E18-D80NK型號,因為E18-D80NK模塊易于裝配使用方便,并且為外殼全包裹式,不易進水,防水性好,因此選用E18-D80NK作為噴頭內部的檢測模塊。該系統主要功能是采用新型噴頭進行黃瓜蘸花工作和環境檢測,為此設計出一款搭載多種檢測模塊的采用芯片控制的噴藥機。此系統主要由單片機、新型黃瓜蘸花噴頭、繼電器及噴灑裝置、環境檢測裝置、藍牙模塊、手機APP等組成,系統整體框圖如圖1所示。
本系統在開啟后,首先會進行各類模塊的初始化,然后動力系統運行2秒鐘,目的為排出噴藥導管內空氣,為下一步正常運行做好準備。當紅外模塊檢測到有黃瓜花進入時開啟噴灑,當黃瓜花拿出時停止噴灑,浪費的藥液會匯聚在圓球外罩底部,通過藥液回收導管被水泵重新回收利用。所有環境檢測模塊的數據會發送到手機APP供農戶進行查看,操作簡單,方便快捷。整體構造如圖2所示。
2 ?理論分析與計算
2.1 ?新型黃瓜蘸花噴頭設計
該系統搭載了一款新型黃瓜蘸花噴頭,該噴頭包括圓球形外罩,三個內嵌式噴頭,收集浪費藥液導管和紅外檢測裝置。圓球形外罩上端開口作為黃瓜花進入端,圓球形外罩一側裝有紅外檢測裝置,進行檢測有無黃瓜花進入,圓球形外罩左右后方分布著噴灑藥液的噴頭,可以實現對黃瓜花的全方位噴灑不留死角;圓球形外罩下端開口連接藥液回收導管,藥液回收導管另一端連接藥液回收水泵,浪費藥液通過此導管被回收進藥筒進行重復利用;機身搭載單片機作為中控系統,當檢測到有黃瓜花進入時,給單片機傳入噴灑信號,單片機通過控制繼電器,從而控制動力系統與藥液回收水泵進行工作。其中圓球外罩為內直徑12 cm薄壁3 mm的空心球,空心球左斜上方45度直徑6 cm圓形開口作為黃瓜花進入端,預留三個直徑為1 cm噴頭孔,和右側斜上方45度開直徑1.5 cm紅外模塊預留孔。結構如圖3所示
2.2 ?基于紅外線反射的檢測技術
系統在噴灑藥液時采用了基于紅外線反射的檢測技術,紅外線檢測裝置是一種集發射與接收于一體的光電傳感器,發射光經過調制后發出,接收頭對反射光進行解調輸出。有效地避免了可見光的干擾。紅外線與光在空氣中的傳播速度相同,從而得知紅外線的傳播速度,通過計算就可得出檢測到黃瓜花的所需要的時間。其計算公式為:
式中T為紅外線從發送到接受的時間也就是檢測到黃瓜花的時間,S為紅外線發射裝置到黃瓜花的距離,由圓球形外罩內直徑為12 cm得知,S的范圍為0 cm~12 cm。將S代入公式得T趨于0,因此當有黃瓜進入圓球外罩并進入檢測區域的一瞬間系統就能立刻做出反應,能夠達到靈敏高效的效果。
2.3 ?浪費藥液自動回收技術
系統在噴灑藥液時,僅僅需要將黃瓜上噴灑上藥液即可,未噴灑到黃瓜上的藥液會吸附在圓球外罩內壁上,最終形成水滴,最終由于重力原因,匯聚到圓球外罩底部,其重力公式為:
G=mg
由于水滴與內表面具有吸附力,當匯聚的水滴重力大于吸附力時就會沿內壁流向圓球外罩底部,在底部接有藥液回收導管如圖4所示,藥液回收導管另一端與水泵相接,將匯聚的藥液重新回收到藥桶進行多次利用。
2.4 ?基于藍牙模塊的串口通信技術
系統在正常運行時,用戶可以在手機APP端觀測周圍環境內的環境數據,如溫度、土壤濕度、光照強度、二氧化碳濃度都會通過藍牙模塊將數據回傳到手機端。串口通信是指外設和計算機間,通過數據信號線、地線、控制線等,按位進行傳輸數據的一種通訊方式。這種通信方式使用的數據線少,在通信中可以節約通信成本,但其傳輸速度比并行傳輸低。它很簡單并且能夠實現遠距離通信。該系統用的是HC-42藍牙模塊,具有低功耗、低延時的特點。符合本系統短距離數據傳輸,方便快捷,低延時,低功耗的需求。
3 ?硬件電路與軟件設計
3.1 ?硬件電路設計
系統控制模塊采用了STC12C5A60S2單片機,該單片機的運算能力強,處理速度較快,用其來完成重量數據的采集、運算處理以及計時模塊的時間轉換極大程度上提高了系統的靈敏度與準確性,用其來完成黃瓜花檢測,控制繼電器通斷,信息傳輸,環境數據處理,語音提醒、效果監測等功能。依據實際需求采用12 V大功率隔膜泵來實現藥液的霧化控制和12 V蠕動泵作為藥液回收水泵,噴頭與噴桿處采用硅膠管進行連接,噴頭采用三個可調霧化直噴噴頭代替,采用兩個1路5 V繼電器作為水泵的間接控制開關,測溫模塊采用DS18B20,二氧化碳傳感器采用MH-Z19B模塊,在搭建完成基本電路加入了充電過沖保護模塊和開機鎖等功能。
新型黃瓜蘸花噴頭采用PLA材料打印,尾端采用1 m不銹鋼導管與手柄進行連接,使整個噴頭重量不超過400克,使之達到輕便效果,并在新型噴頭上添加紅外檢測裝置,檢測到有黃瓜花進入時,進行自動噴灑,當檢測到有黃瓜進入時,紅外檢測裝置信號輸出角就會對單片機輸出高電平信號,供單片機進行識別,并且由公式得,紅外檢測裝置極其靈敏,如圖5為藥液噴灑裝置電路圖
3.2 ?系統軟件設計
系統程序開始后單片機會啟動系統電源自檢程序、對環境檢測模塊、藍牙模塊進行初始化,最后對噴灑系統進行初始化,啟動噴灑系統2秒鐘,排空導管內空氣使導管內充滿藥液。當紅外檢測裝置檢測到有黃瓜進來時給單片機傳入信號,單片機啟動噴灑。當手機與藍牙模塊連接后,就會自動向手機APP進行發送環境信息。系統軟件工作流程如圖6所示。
紅外檢測裝置與水泵藥液噴灑以及藥液回收工作過程關鍵代碼為:
if(c3==0)//紅外檢測
{ms1=1;c2=1;PS_Start();}//噴灑中
else{ms1=0;c2=0;PS_Stop();}//噴灑停止
if(miao1>=5)//噴灑工作總時長
{c1=0;miao1=0;ms2=1;miao2+=30;//水泵工作時長
if(miao2==0)CS_Stop();//抽水停止
elseCS_Start();//抽水中
環境檢測中以溫度檢測為例,關鍵代碼為:
int Ftemperature()
{unsigned char low=0,high=0;int temp=0;
init_ds18b20();
Write_DS18B20(0xCC);
Write_DS18B20(0x44); //啟動溫度轉換
Delay_OneWire(200);
init_ds18b20();
Write_DS18B20(0xCC);
Write_DS18B20(0xBE); //讀取寄存器
low = Read_DS18B20(); //低字節
high = Read_DS18B20(); //高字節
temp=high;temp<<=8;temp|=low;
if((temp&0xf000)==0x0000)
{temp>>=4;}
temp = temp*10 + (low&0x0f)*0.625;溫度轉化
return temp;}
4 ?實驗測試與分析
最終本系統包括硬件與手機APP,如圖7(a)所示,該系統供電后開始運行,紅外檢測裝置會處于檢測狀態,當檢測到有黃瓜進入到噴頭內時開啟自動噴灑,此時OLED屏幕會顯示此時的工作狀態,當噴灑達到規定時間后藥液回收水泵會自動開啟,將藥液會收到藥桶內進行二次使用。同時搭載了兩塊太陽能板為電池持續充電,延長了續航時間。同時手柄處還設置了應急開關,可以隨時關閉噴灑系統,各類傳感器如圖7(b)所示。APP頁面如圖7(c)所示,將環境檢測模塊顯示出來供管理者讀取。
在對該系統的黃瓜蘸花速度進行測試時,選取了三畝黃瓜種植農田,分別將三畝農田劃分為等面積的三塊農田標號為1、2、3號,采用該系統蘸花與人工蘸花和“c”型噴頭工具蘸花三組蘸花方式進行蘸花工作,定義該系統為甲組,人工蘸花為乙組。“c”型噴頭工具蘸花為丙組,使甲、乙、丙組分別對1、2、3號黃瓜農田輪流進行蘸花作業,因此每畝農田會被蘸花3次,確保對植株的安全性,因此使用清水代替蘸花藥液。三組同時開始蘸花,每工作一畝記錄一次時間,最后得到如表1測試數據:
從實驗結果來看,甲組(該系統組)從噴灑效率上遙遙領先了人工蘸花組,同時大幅度提升了藥液使用的效率,對此噴頭的改進達到了預期的效果。
除此之外,對于其他模塊的性能也進行過多次測試,通過與其他溫度計和其他測試器件多次比測試,測量的環境參數誤差也在允許范圍內,對HC-42藍牙模塊的靈敏度與在保證傳輸數據準確的情況下,發送數據的時延性也符合要求。測試表明本系統良好,準確度較高,靈敏性較強,能夠滿足設計的要求。
5 ?結 ?論
該系統對基于51單片機的多功能黃瓜蘸花噴藥機進行設計研究,給出了一款攜帶有革新蘸花噴頭于能進行環境檢測的多功能蘸花噴藥機系統,能夠借助噴藥機電源使噴藥機在農閑時成為一套大棚內的環境檢測系統,方便了基層種植者對農作物的管理,滿足了基層種植者對環境檢測的需要,達到了智慧農業大棚最基礎的功能。此外,研究設計的新型黃瓜蘸花噴頭,通過在結構和設計上的創新,使其在蘸花速率和藥液使用率上大幅度提升,能夠在保證了不浪費藥液的情況下,工作效率提升了近三倍,并且減輕了工作勞動量,簡化了工作流程,保障了人員的安全性,同時對黃瓜葉片的影響達到最小。此系統達到了研究的目的與效果,在一定程度上推動了農業的發展。
參考文獻:
[1] 武宇星,韓祥森.基于Arduino單片機的智能藥盒系統設計 [J].現代信息科技,2021,5(7):29-32+37.
[2] 謝文和.傳感器及其應用 [M].北京:高等教育出版社,2003.
[3] 劉巍.應變式傳感器的原理及對應變片性能的測定 [J].科技經濟市場,2015(2):102-103.
[4] 高天學.基于STM32的無線運動傳感節點設計 [J].現代信息科技,2020,4(24):35-38.
[5] 高天學,曹偉.基于物聯網的新型農藥化肥自動噴灑系統設計 [J].現代信息科技,2021,5(9):154-157.
[6] 華成英,童詩白.模擬電子技術基礎 [M],第四版,清華大學出版社,2006.
[7] 求是科技.單片機典型模塊設計實例導航 [M].北京:人民郵電出版社,2004.
[8] 譚浩強.C程序設計 [M].北京:清華大學出版社,1991.
作者簡介:王高樂(2002—),男,漢族,山東聊城人,本科在讀,研究方向:電子信息工程;韓祥森(1994—),男,漢族,山東淄博人,助教,本科,研究方向:電子與通信技術、智能控制。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36