基于雙饋式前級信號處理技術的永磁同步電機啟動性能改善方法研究
2021-06-08 08:29:32司文凱喬志杰
蘭州文理學院學報(自然科學版) 2021年3期
董 藝,司文凱,喬志杰
(1.安徽電子信息職業技術學院 機電系,安徽 蚌埠 233030;2.安徽理工大學 電氣與信息工程學院,安徽 淮南 232001)
目前針對永磁同步電機啟動控制方法的研究有很多,但多數方法只是對電機控制環節的設計加以改進.筆者通過研究發現,多數條件下與其在控制環節增加復雜的算法來改善性能還不如在輸入級進行性能優化以獲得優秀的控制效果.從理論上說,永磁同步電機的典型輸入信號多是階躍信號或者斜坡信號[1].階躍信號雖然可以快速給定目標值,但它包含無限頻帶寬度的諧波信號,而實際系統的帶寬是有限的.過高的頻率信號送入系統,勢必會引起系統震蕩,進而形成較大的超調量,這樣有可能造成對設備的損害.斜坡信號可以讓信號以一種漸進增加的形式逐漸到達目標值,變無限頻帶為有限頻帶,其給定速率取決于斜坡的斜率.斜坡信號漸進增加的特性可以大大減少系統內積分環節帶來的超調量[2].
斜坡信號也存在幾個問題:第一,要做到理想輸入,對于不同系統或者同一系統不同的需要,所需斜率可能是不同的[3-4];第二,由于對系統的超調量沒有反饋信息,減小斜率會加大系統的反應時間,加大斜率可能又會導致系統超調量增加[5-6],因此難以找到最佳的斜率值.
1 雙饋式前級信號處理原理
針對階躍和斜坡兩種信號自身存在的問題,筆者基于電機控制系統提出一種雙饋式前級信號處理技術,加入雙饋式前級信號處理環節的電機控制系統如圖1所示.
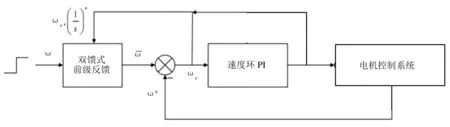
圖1 加入雙饋式前級信號處理環節的電機控制系統
由圖1可以看出,通過設計出雙饋式前級信號控制器,從而將輸入階躍信號進行處理然后送給控制系統,最后利用速度環和轉速差的反饋信息來調節控制器,進而觀察能否達到較為理想的控制效果.
由文獻[2]可知雙饋式前級信號可以利用誤差和積分反饋信號對輸入信號作處理.信號的處理采用指數函數.圖2為雙饋式前級信號處理框圖.

圖2 雙饋式前級信號處理框圖
雙饋式前級信號信號處理部分采用指數函數,它的輸出值表達式為:
(1)
式中:yout為信號輸出,kq1、kq2為擴張系數、xin為輸入信號、a1、a2為指數因子、t0為切換點時間、t2為終止時間、c為切換余值.雙饋式前級信號處理的函數圖像與對應的方程如圖3所示.
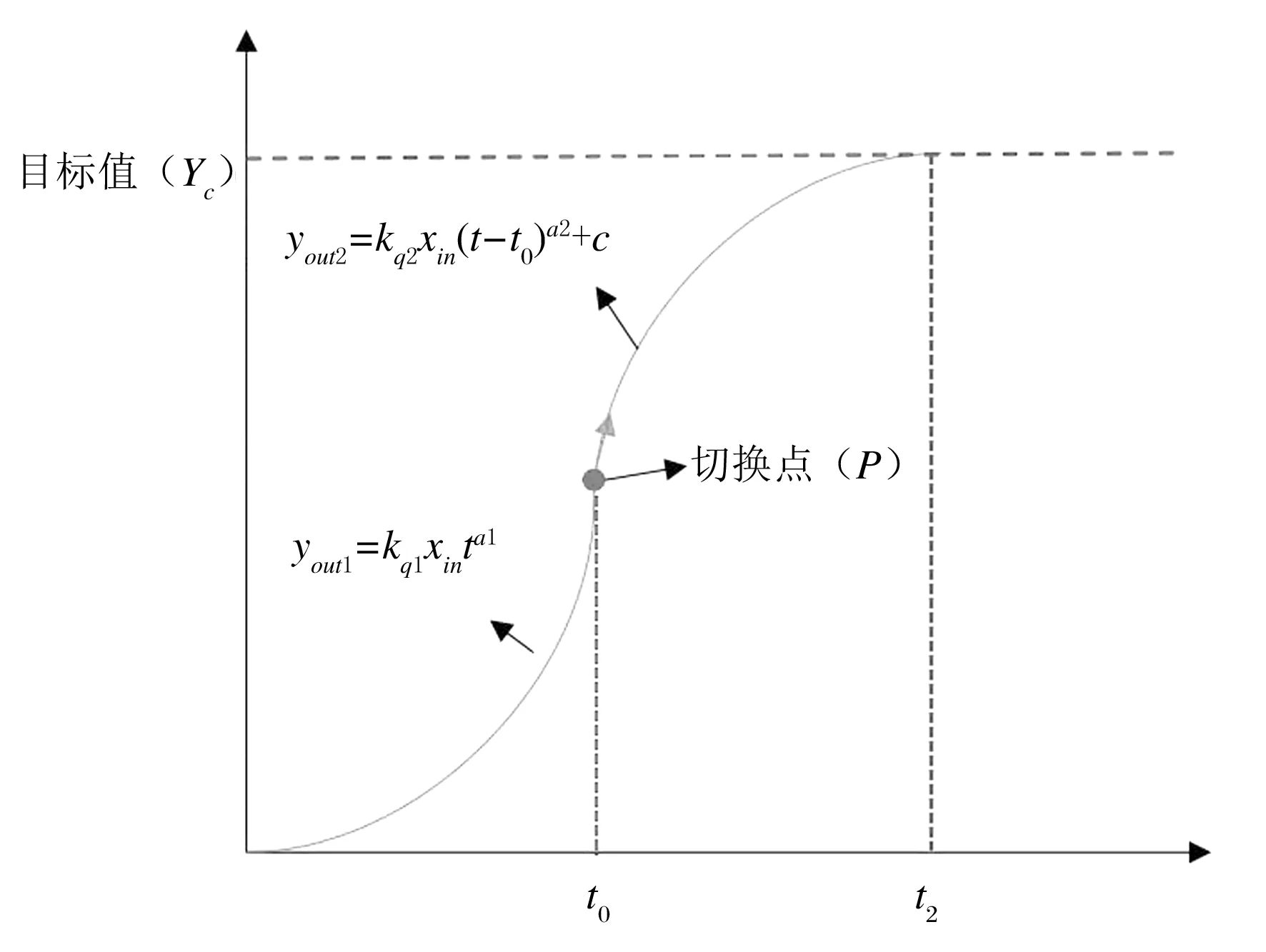
圖3 雙饋式前級信號處理圖

(2)
此函數斜率為:
(3)
此時輸出的信號函數為:
yout1=kq1xinta1.
(4)
此函數斜率為:
S2=a1kq1xinta1-1.
(5)
當它們的斜率相等時,有:
(6)
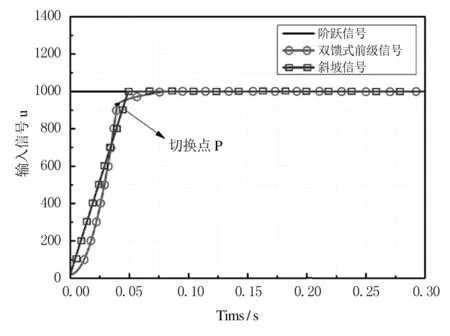
因為a1>0,所以0 斜坡函數y2斜率為: (7) 指數函數斜率為: S4=a2kq2xin(t-t0)a2-1. (8) 當它們的斜率相等時,有: (9) 由前述可知,雙饋式前級信號控制主要是由兩個不同的指數函數構成.當滿足條件時,第一個指數函數將切換到第二個指數函數,這勢必會存在一個切換點P,切換點的位置判斷條件要依據兩個反饋信號.此外我們知道越是在接近實際值時,往往在控制器中會積累相當多的不必要誤差信息,這些信息會讓系統即使達到了目標值也無法及時穩定下來,使系統繼續出現超調,只有在控制器經過多次的調節后方能穩定.所以后期的積分誤差信息也是需要考慮的內容之一.因此控制器數學基本表達式為: (10) (11) 其中zp為判斷函數,α1、β1為權值,k1為縮減系數. (12) 根據以上分析,可以設計出雙饋式前級信號處理器的Simulink仿真圖,如圖4所列. 仿真實驗中,筆者在三相永磁同步電機(PMSM)的前級加入圖4所設計的雙饋式前級信號處理器,并分別對其施加圖5中階躍信號、斜坡信號以及雙饋式前級信號處理器處理后的信號,得到的實驗結果如圖6所示. 圖6 PMSM系統輸出轉速波形圖 圖4 雙饋式前級信號處理器Simulink仿真圖 圖5 對PMSM控制系統施加3種信號的波形圖 為了獲得永磁同步電機優良的啟動效果,很多研究人員在電機控制環節進行了大量的研究與探索,也獲得了很多成果,但是幾乎都使得控制系統變得非常復雜,從而增加了設計成本與控制成本.筆者針對電機的輸入級入手,設計了一種實用的、成本相對較低的前級信號處理器.通過仿真實驗可以看出,使用前級信號處理之后,明顯地改善了永磁同步電機的啟動特性.在采用閉環控制條件下,系統可以自適應在不同參考值下改善系統的啟動性能.
2 雙饋式前級信號控制器的設計



3 仿真實驗與分析



4 結語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
