基于三維激光掃描技術的建筑立面應用研究
2021-06-18 03:29:30黃文嘉
資源導刊(信息化測繪) 2021年4期
黃文嘉
(廣州市城市規劃勘測設計研究院,廣東 廣州 510060)
目前常用的建筑測繪方法主要有傳統測繪法、近景攝影測量法和三維激光掃描技術測量法,其中,傳統測繪方法主要采用手工測量或傳統測繪儀器測量;近景攝影測量法通過在地面攝影測量的方式實現;三維激光掃描技術則通過掃描獲取建筑物的特征信息,通過后期處理得到建筑物二維立面圖、三維線劃圖和三維模型[1]。相較于傳統的測量手段,三維激光掃描技術能在多種環境下全天候作業,采用主動發射激光的方式,無需直接接觸目標物,即可獲取目標物表面的點云數據[2],還能在掃描過程中實時、動態顯示掃描數據,并采用數字化方式儲存,以便后期各種建模軟件的處理與輸出。
1 點云數據采集
數據采集要準備以下儀器設備:Riegl VZ-1000三維激光掃描儀、配套電池兩塊及其充電器、三腳架1 個、配套單反相機1 套、高分辨率數碼相機1 臺、筆記本電腦1 臺。
在掃描作業時,首先在控制點位置架設儀器,必要時搭設平臺進行掃描。通過與Riegl VZ-1000 掃描儀配套的RiSCAN PRO 軟件對目標進行數據采集:設置分辨率為10 mm 進行全景掃描,確定目標物所在區域的范圍和方位,然后根據掃描需要,設置分辨率為2 mm,選取建筑物所在影像區域進行精細掃描,獲取點云數據。檢查點云數據的完整性,如有缺失或異常數據,應及時補測;若沒有就命名并儲存點云數據,進行下一測站的掃描工作,直至完成所有掃描任務。
2 點云數據處理
2.1 點云配準
使用Geomagic Studio2016 軟件的全自動配準功能,一鍵將所有測站拼接起來。配準時需要選擇1 個基準測站,基準測站配準過程中保持坐標不變,其他測站會與基準測站尋找公共部分,并通過平移旋轉拼接到正確位置,因此,基準站必須是水平測站[3]。全自動配準具體過程如下:
(1)粗略配準。系統分析每個測站中所有豎直面并進行編號,計算出各個測站之間匹配的唯一解。
(2)精化配準。系統分析每個測站中的所有水平面,對配準結果進一步優化;然后使用迭代最近點法(ICP)讓兩個測站的點云數據擁有最大重疊率,并使得重疊區域有最小殘差值。
(3)提取預覽點云。預覽點云相當于步長為6 進行采樣。步長采樣原理為: 將當前測站的點云數據視為一張以儀器位置點為中心的全景圖,每個三維點視為1 個不會被重疊的全景像素。當所有像素均被提取時,步長為1;當每6 個像素提取1 個三維點時,步長為6。使用步長采樣可以快速獲取輕量化的稀疏點云,并保持現實世界的結構特征,有利于在自動拼接結束時,快速對拼接質量進行檢查。測試地點1 為一條歷史建筑街面,共掃描24 站,每個測站掃描2 min,外業總用時不到2 h。全自動拼接用時30 min,拼接完成后會自動顯示配準報告,報告顯示點云配準整體精度為4.7 mm,基于公共點的點云拼接如圖 1 所示。
軟件將兩測站的對象點云,通過手動注冊方式完成對點云數據的初始拼接:首先在視圖窗口將兩站點云視圖,調整至相近方位,然后依次選取兩站點云中的3 對公共點。公共點盡量選擇帶有明顯標識性信息的點,如角點、拐點等。兩站點云間的平均距離為9 mm,標準偏差為21 mm,拼接精度滿足初始配準的精度要求。
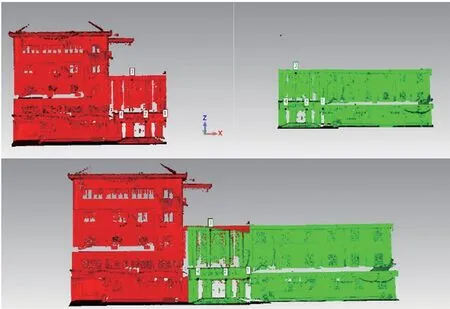
圖1 基于公共點的點云拼接
2.2 點云去噪
準備測量的建筑物位于越秀區較繁華街道,由于附近來往游客以及周圍植被、建筑物等遮擋物的影響,獲取的點云數據必然存在一些噪聲點。噪聲點不僅會影響三維模型的精度,還會影響處理速度,因此為了降低噪聲對后續建模精度的影響,有必要對點云進行去噪,保證后期三維建模時的精度。噪聲點主要是來往行人、雜亂的電力線、城市綠化、空氣中的灰塵顆粒以及儀器本身造成的粗差點云等。
這些噪聲點一般有以下幾種處理方法:
(1)對于一些數據量大且人眼可直接觀察的點云數據,可以直接使用點云處理軟件中人機交互的方式,手動框選后將其刪除;
(2) 對于空氣中的灰塵,可以利用軟件自帶的“采樣”功能,將其分離出去;
(3)剩余噪聲多屬于離群點,密度不均且離主體建筑物對象較為接近,手工刪除效率較低、去噪效果較差,因此,可以選擇軟件的“去噪”功能,去除該類噪聲。
項目掃描時間避開了上下班高峰期,行人、車輛較少,噪聲點大多為樹木、空氣中的灰塵等。將三個測站的點云導入軟件,發現數據存在噪聲點云,影響點云配準的精度,因而,先通過軟件“選擇”功能中的“非連接項”和“體外弧點”選項,初步去噪。非連接點是通過與主體點云的距離關系,剔除與主體點云沒有連接關系的噪聲點;體外弧點是剔除與主體點云中絕大多數點云相距較遠的噪聲點。綜合考慮去噪效果、去噪工作的時間消耗等多方面因素,可以發現當迭代次數為3 次時,最終結果最為良好,因此本次點云去噪流程,設置迭代次數為3 次。前兩步去噪剔除了大部分噪聲點。但是由于有部分灰塵顆粒,其反射率高于建筑物,或者較為接近地面的噪聲點,難以依靠軟件的去噪算法進行剔除,需要手動剔除,最終得到圖2 所示的去噪前后對比圖。

圖2 點云去噪前后對比圖
2.3 數據精簡
掃描分辨率越高、目標物越大,采集到的點云數據量就越多,因為是通過重疊部分的公共點進行點云配準,所以點云會存在數據冗余,需要進行數據精簡。
通過軟件的“統一采樣”功能,采用均勻抽稀的方法精簡數據,并調整點云間的疏密,以避免點云疏密不均導致的數據不準確問題。精簡后點云數量由850 萬縮減至398 萬個。
3 建筑物立面圖的生成
建筑物立面圖主要包含建筑物的外貌和外部結構信息、建筑各部分垂直方向的高度、外部裝飾造型等。
以點云為原始數據,繪制立面圖,其精度與點云精度基本一致,且立面圖比例為1∶1,可以更精確呈現建筑物表面的紋理和結構特征。由于數據量十分龐大、CAD 加載的數據量有限,實際繪制之前必須對點云數據進行分割,然后再利用AutoCAD 進行繪制。
具體方法為:通過Geomagic 處理軟件將點云模型進行平面投影處理,得到投影后數據,再進行提取并繪制。該方法提高了繪圖效率,減少多余點云的干擾。具體操作可分為下列幾步:
(1)本文案例的點云數據量并不多,可直接利用軟件設置為las 格式,并定義坐標軸,將點云數據導出。(2)通過Autodesk Recap 將las 格式點云轉換為rcp 格式。(3)通過軟件的“附著”功能加載點云。(4)觀察導入的數據是否為需要的視圖方向,若不是就先調整點云的坐標系,使其與視圖坐標系相同。然后定義平面,根據正射點云數據繪制立面圖。(5)重復上述步驟建立建筑西面的立面圖。由于該建筑物位于十字路口,沿街立面只有北面和西面,因此只需建立建筑物北面和西面的立面圖,如圖3 和圖4 所示。

圖3 建筑北面立面圖
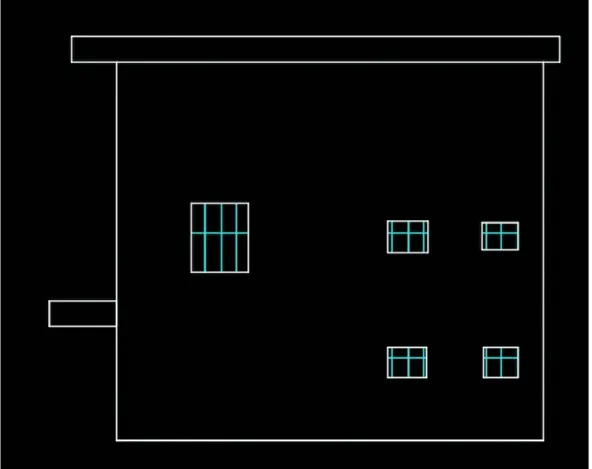
圖4 建筑西面立面圖
4 結束語
本文以廣州市某大樓為例,詳細闡述了大樓的外業數據采集流程及其注意事項和避免手段,對大樓點云進行配準、去噪、簡化等數據預處理,總結與分析了實際數據采集過程中遇見的問題。基于大樓的點云數據,完成了大樓點云模型的建立,通過點云模型可以量測整個大樓的尺寸數據,為大樓的傾斜度、平整度檢測提供了數據支持;通過繪制立面圖、精度分析驗證可行性,為以后大樓的立面改造提供了數據保障。
