運載火箭推進劑利用系統變門限控制方法研究
2021-06-19 08:45:54楊虎軍董余紅
導彈與航天運載技術 2021年3期
劉 秉,李 東,楊虎軍,何 巍,董余紅
(1. 北京宇航系統工程研究所,北京,100076;2. 西北工業大學,西安,710072;3. 中國運載火箭技術研究院,北京,100076)
0 引 言
采用雙組元推進劑的液體運載火箭,存在由于兩種推進劑加注量偏差引起的加注混合比偏差和飛行過程中由于干擾因素引起的發動機混合比偏差。為了確保有效載荷入軌,必須留有足夠的推進劑安全余量,以克服上述偏差對有效載荷入軌概率的影響。而加注混合比偏差和發動機混合比偏差存在一定隨機性,推進劑安全余量留取過多將影響運載能力,留取過少則影響飛行安全。
工程上一種可行的解決方法是在液體運載火箭設計中增加推進劑利用系統,在飛行中實時控制混合比偏差[1~8],以減少推進劑安全余量,提高火箭的運載能力。宇宙神和土星五號火箭、半人馬座上面級等運載器均采用了推進劑利用系統。推進劑利用系統已廣泛應用于各航天大國的液體運載火箭設計中[9~12]。
推進劑利用系統根據測量的液位高度,計算出推進器兩組元的剩余量,并由控制機根據給定的控制方程輸出調節活門控制信號,利用調節發動機燃燒混合比控制推進劑的剩余混合比,盡可能地減少關機時燃料或氧化劑的剩余質量。
葛李虎等[13]介紹了推進劑利用系統在國外型號上的應用情況,研究重點在技術方案的分析、混合比偏差的控制等方面,對低溫推進劑利用系統的詳細控制方法研究較少。按個關于低溫推進劑利用系統的研究始于20世紀80年代。隨著中國低溫運載火箭研究的不斷深入,逐步開展了低溫推進劑利用系統詳細控制方法的研究工作。
本文首先建立了低溫推進劑利用系統混合比偏差控制的數學模型;其次對變門限調節控制方案開展了研究;然后介紹了仿真和飛行試驗驗證情況。
1 混合比偏差控制模型
1.1 推進劑利用調節原理
利用系統控制器接收貯箱內的液位傳感器實時測得剩余推進劑信息[14],根據預定的控制目標,輸出控制指令給發動機上的利用調節閥門。發動機上的利用調節閥門作為控制剩余推進劑混合比偏差的執行裝置,對混合比偏差實時進行調節。調節信息流見圖1。
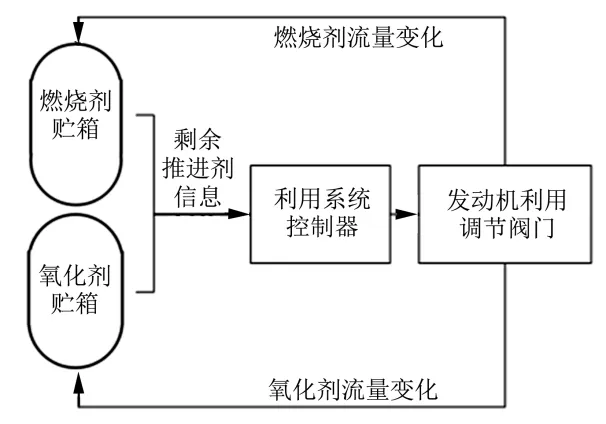
圖1 推進劑利用調節信息流Fig.1 Adjusting Information Flow of Propellant Utilization
1.2 混合比偏差控制模型
設火箭飛行中剩余氧化劑和燃燒劑的質量分別為My和Mr,則My和Mr分別是氧化劑和燃燒劑液位高度隨時間變化的函數,可用如下公式表示:
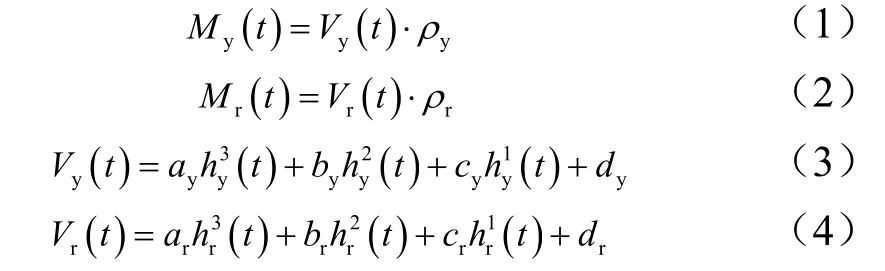
式中hy(t)為氧化劑液位高度,mm;hr(t)為燃燒劑液位高度,mm;Vy(t)為剩余氧化劑體積,m3,是隨液位高度hy(t)變化的函數,用三階多項式表示;ay,by,cy,dy為多項式系數;Vr(t)為剩余燃燒劑體積,m3,是隨hr(t)變化的函數,用三階多項式表示;ar,br,cr,dr為多項式系數;ρy為剩余氧化劑密度,kg/m3;ρr為剩余燃燒劑密度,kg/m3。
設利用系統調節的目標混合比為K,利用系統調節過程就是將火箭飛行中實際的剩余推進劑混合比調整到K值附近,使得氧化劑和燃燒劑的比例達到設計要求的最佳水平。為此,設混合比偏差控制模型如下[15]:

式中B(t)為剩余推進劑綜合控制值,kg;G0為調節偏差控制常數,kg。
由式(1)至式(5)可知,在K,0G,yρ,rρ等參數給定的情況下,通過氧化劑和燃燒劑液位高度隨時間變化的數值,可以計算得到剩余推進劑綜合控制B值隨時間變化的數值。
2 基于變門限的利用系統控制方法
2.1 利用系統控制邏輯
利用系統的控制目標是將B的數值控制在零值附近。控制邏輯為:
a)當B值在正負門限內時,表示剩余氧化劑和燃燒劑的比例在預定值附近,此時將發動機利用調節閥門置為一開一閉狀態,發動機為額定工況,氧化劑流量和燃燒劑流量處于額定狀態,利用系統不進行調節。
b)當B值超出正門限時,表示剩余氧化劑偏多,此時將發動機利用調節閥門置為全開狀態,發動機轉為高工況,氧化劑流量增大,燃燒劑流量減少,利用系統調節的結果是使得B值變小,直至回到正負門限內。
c)當B值超出負門限時,表示剩余燃燒劑偏多,此時將發動機利用調節閥門置為全閉狀態,發動機轉為低工況,氧化劑流量減少,燃燒劑流量增大,利用系統調節的結果是使得B值變大,直至回到正負門限內。
2.2 固定門限控制方法的局限性
基于固定門限的利用系統控制方法如圖2所示。固定門限如圖2中虛線所示,正門限和負門限是恒定的數值,不隨時間變化。
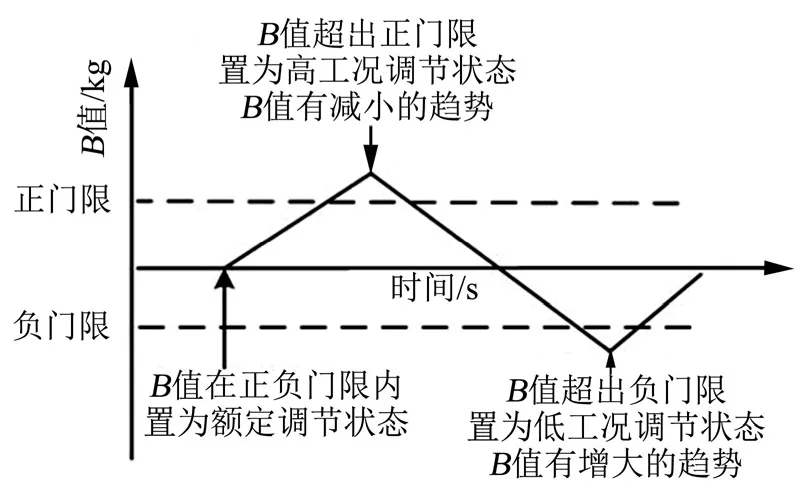
圖2 推進劑利用控制方法(固定門限)Fig.2 Propellant Utilization Control Method (Fixed Threshold)
固定的調節門限設置,是基于對混合比偏差控制的需要,混合比偏差量超出門限可能引起調節。為了盡量提升運載能力,門限設置不能過寬,否則無法起到調節作用。
在工程實際實施過程中發現,固定門限控制方法存在一定的局限性。
一方面,利用系統自身誤差引起不必要調節。由于推進劑液位存在晃動現象,同時液位傳感器局部存在測量誤差,會引起B值波動,若采用固定門限進行調節控制,則B值很容易超出門限。
另一方面,過多的調節閥門動作增加發動機工況切換負擔,成為飛行中的隱患。這種調節并不是由于剩余推進劑混合比偏差超出預定值而產生的,造成了發動機調節閥門動作次數較多,進而在不同工況之間反復切換。
綜上所述,從避免利用系統自身誤差引起不必要調節、過多的調節閥門動作增加發動機工況切換負擔角度出發,提出基于變門限的混合比偏差控制方案。
2.3 變門限控制方法
變門限調節方法,即從利用調節開始,實時計算當前調節門限值,該門限值不是最終控制值,而是飛行時間剩余量(即距離當前時刻多長時間以后關機)乘以單位時間剩余推進劑偏差控制量得到的,即在剩余時間內,利用系統最多可以調節掉多少剩余推進劑偏差量。若超出該限值,應該立即啟動調節;若未超出該限值,則可以先不調節,從而達到推遲第1次調節發生的時間,減少調節次數的目的。
基于變門限的利用系統控制方法如圖3所示。變化門限如圖3中虛線所示,正門限和負門限是隨時間變化的數值。
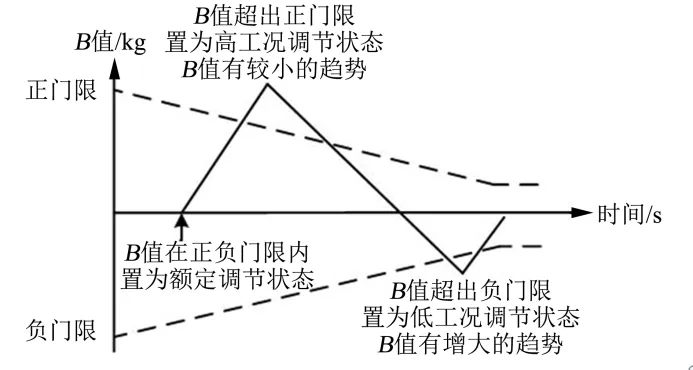
圖3 推進劑利用控制方法(變門限)Fig.3 Propellant Utilization Control Method (Variable Threshold)
2.4 小 結
本節首先介紹了利用系統進行剩余推進劑混合比偏差控制的基本邏輯,即比較剩余推進劑綜合控制值(B值)與設定的門限值(D值)之間的關系,根據比較結果向發動機利用調節閥門輸出控制指令;其次,從利用系統自身調節誤差、發動機頻繁工況切換風險角度,分析了傳統固定門限控制方法的局限性;最后,給出變門限利用系統控制的邏輯。
3 隨時間變化門限計算方法
門限值的具體計算方法是變門限控制的關鍵。隨時間變化的門限曲線類似于喇叭形,當推進劑剩余量偏差(B值)位于“喇叭口”內的區域時,利用系統可以滿足調節量的要求;當推進劑剩余量偏差(B值)位于“喇叭口”外的區域時,利用系統不滿足調節量的要求,即:推進劑剩余量偏差量太大,以至于剩余允許調節時間內調節不完。當推進劑剩余量偏差(B值)落在“喇叭口”輪廓線上時,利用系統剛好能夠滿足調節量的要求。
隨時間變化的門限具體數值等于當前時刻利用系統的最大調節能力,即:在允許調節時間范圍內,t時刻的B值等于門限值時,從t時刻開始調節,正好到允許關機時刻可以將推進劑剩余量偏差(B值)調節完成。若晚于t時刻開始調節,則不能完全消除推進劑剩余量偏差,可能影響運載能力。
在利用系統調節初期忽略可以容許的偏差,待偏差累積到限值時再開始調節,在滿足調節能力的同時,達到推遲首次調節發生的時間、減少調節次數的目的。
隨時間變化的門限D值,計算公式如下:
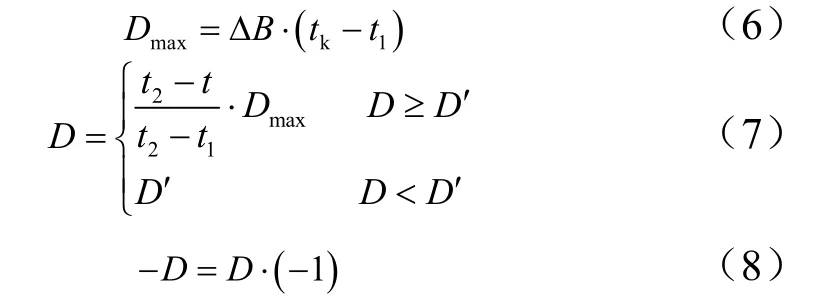
式中Dmax為發動機調節區控制量最大值;BΔ 為發動機高/低工況下,相對于額定工況下B值的變化速率,通過發動機試車獲得的高/額定/低工況下氧化劑和燃燒劑的流量數據計算得到,kg/s;tk為利用系統停止調節時間,一般等于發動機關機指令發出時間,s;1t為利用允許調節開始時間,s;D′為門限收窄后的固定值,kg;t為相對于起飛的當前飛行時間,s;t2為一級發動機調節區控制量D值理論計算為零的時間,s。
4 仿真試驗及分析
在前述利用系統混合比偏差控制的數學模型基礎上,使用Matlab工具搭建數學仿真平臺,對利用系統固定門限和變門限兩種不同的控制方式開展比較分析。
4.1 固定門限調節仿真
按照固定門限的推進劑利用調節方案,利用閥門調節狀態見圖4、圖5。從圖4可以看出,首次調節時間出現在178 s,利用調節閥門切換頻繁,全程共計調節38次。

圖4 固定門限利用系統仿真結果(全程)Fig.4 Simulation Results of Fixed Threshold Utilization System(Whole Process)
特別是在220~240 s,B值位于零值附近,在推進劑液位波動的影響下產生B值波動,反復穿越正負控制門限,產生了連續的閥門調節動作,見圖5。

圖5 固定門限利用系統仿真結果(局部)Fig.5 Simulation Results of Fixed Threshold Utilization System(Local)
4.2 變門限調節仿真
使用基于變門限的利用調節優化算法,進行仿真計算,利用閥門調節狀態見圖6和圖7。首次調節時間出現在357 s,利用調節閥門切換次數大幅減少,全程共計調節5次。特別是在220~240 s,雖然B值在推進劑液位波動的影響下產生波動,但是始終在正負控制門限內,且有較大距離,沒有產生閥門調節動作,見圖7。
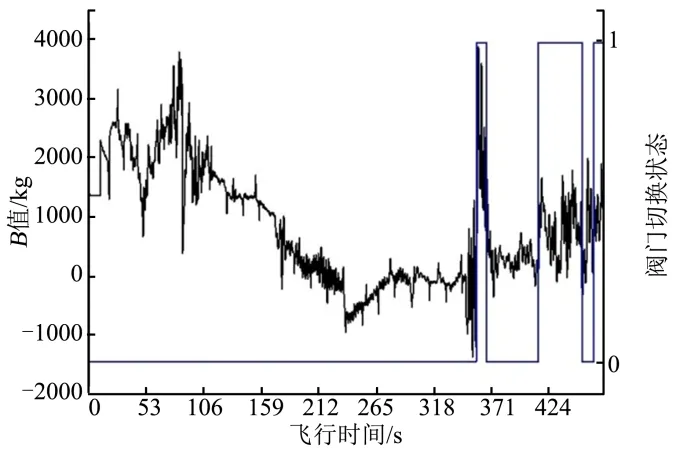
圖6 變門限利用系統仿真結果(全程)Fig.6 Simulation Results of Variable Threshold Utilization System (Whole Process)
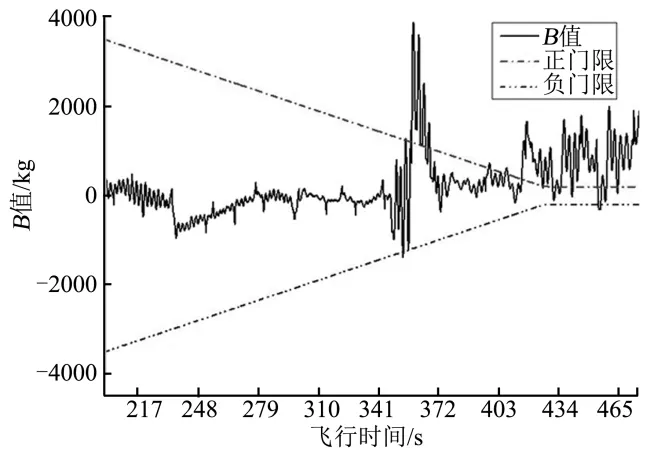
圖7 變門限利用系統仿真結果(局部)Fig.7 Simulation Results of Variable Threshold Utilization System (Local)
固定門限和變門限調節的效果對比分析見表1。仿真結果表明,基于變門限的利用調節在滿足調節偏差控制精度的同時,可顯著降低調節次數,推遲利用閥門首次調節出現的時間。

表1 固定門限和變門限調節的效果對比分析Tab.1 Comparative Analysis of the Effect of Fixed Threshold and Variable Threshold Regulation
5 飛行試驗及分析
運載火箭推進劑利用系統變門限控制方法已在飛行試驗中得到應用。變門限利用系統飛行試驗結果如圖8所示。在滿足混合比偏差控制要求的同時,飛行全程僅調節2次,與仿真試驗結果相當。與固定門限的調節方法相比,變門限控制方法滿足調節需要的同時,調節次數大幅降低。
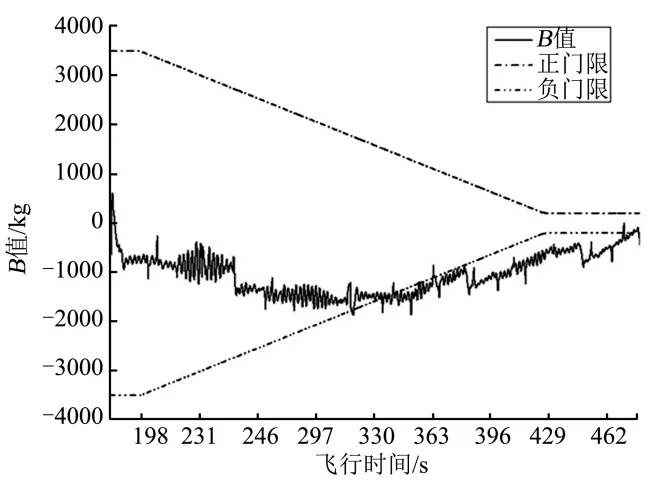
圖8 變門限利用系統飛行試驗結果(局部)Fig.8 Flight Test of Variable Threshold Utilization System(Local)
飛行試驗證明,采用變門限推進劑混合比實時控制技術,可根據調節能力和飛行時間設置調節門限,使調節門限既能夠滿足利用調節的需求,又能夠顯著減少調節次數,降低利用調節引起發動機故障的風險。
6 結束語
針對低溫運載火箭推進劑利用調節過程中調節次數過多問題,提出一種基于變門限的調節方法。仿真計算和飛行試驗證明,該方法可顯著減少推進劑利用調節次數,在滿足調節精度要求的同時,大幅降低發動機工況切換次數,提升飛行可靠性。
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:08
中等數學(2022年2期)2022-06-05 07:10:50
煤氣與熱力(2021年3期)2021-06-09 06:16:18
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
汽車與新動力(2015年1期)2015-02-27 12:11:01
中學科技(2014年11期)2014-12-25 07:38:53
太空探索(2014年3期)2014-07-10 14:59:39