雷達通信頻譜共享及一體化:綜述與展望
2021-07-05 11:31:18劉凡袁偉杰原進宏張健費澤松周建明
雷達學報 2021年3期
劉凡 袁偉杰 原進宏 張健 費澤松 周建明
①(倫敦大學學院電子與電氣工程系 倫敦 WC1E7JE)
②(新南威爾士大學電氣工程與通信學院 悉尼 NSW2052)
③(悉尼科技大學全球大數據技術中心 悉尼 NSW2007)
④(北京理工大學信息與電子學院 北京 100081)
1 引言
隨著5G時代的到來,無線通信設備數量呈現爆炸式增長趨勢。在這一背景下,全球通信產業對無線頻譜的需求日益迫切。自2015年以來,英國的網絡運營商每年需要為900MHz和1800MHz這兩組頻段分別支付1.0×109~1.5×109美元費用,用以提供2G/3G/4G的網絡服務[1]。2015年,位于700~1800MHz的4組頻段在德國被拍賣出了6×109美元的天價[2]。近期,美國聯邦通信委員會完成了第1次5G頻段競拍,其中28GHz頻段以6×108億美元成交[3]。根據報道,到2025年全世界將有超過7.5×1010臺互聯設備。這使得發掘額外的頻譜資源更加迫在眉睫[4]。為緩解這一矛盾,未來的通信系統將要探索與其他電子設備在同一頻段下共存的可行性。其中,雷達頻段被廣泛認為是實現這一目的的最佳候選頻段之一[5]。
雷達起源于20世紀上半葉兩次世界大戰期間。經過數十年的發展,現代雷達系統已在全球范圍內部署,并被應用于氣象預報、警戒監視和航空導航等多個領域。目前,在10GHz頻段以下,L波段(1~2GHz),S波段(2~4GHz)和C波段(4~8GHz)主要被大量軍用或民用雷達系統所占據。然而,這些頻段在未來將有可能容納更多的長期演進技術(Long Term Evolution,LTE),5G新型無線電(New Radio,NR)系統和Wi-Fi系統[5]。在更高頻段,5G毫米波通信頻段與車載毫米波雷達的工作頻段十分接近。隨著無線通信技術的進一步發展,將有越來越多的雷達頻段受到干擾。從歷史發展來看,雷達與通信系統向小型化以及更高頻段不斷演進。目前,在毫米波頻段,現有雷達與通信系統的硬件架構、信道特性以及信號處理方法已經十分接近。從民用角度看,有相當一部分5G/B5G新興應用需要進行感知與通信聯合設計,例如智慧城市、智慧家庭等物聯網應用,以及車聯網、自動駕駛等智能交通應用。從軍用角度看,雷達、通信、電子戰等無線射頻系統的發展長期以來呈現相互割裂、各自為政的狀態,消耗了大量頻譜與硬件資源,降低了作戰平臺的效能。為高效利用頻譜資源,并服務于多種民用與軍用新興應用場景,雷達與通信的頻譜共享(Radar and Communication Spectrum Sharing,RCSS)近期引起了學界和工業界的高度關注[6–9]。
總體而言,RCSS技術包含兩條研究路徑(見圖1):(1)雷達與通信頻譜共存(Radar-Communication Coexistence,RCC);(2)雷達通信一體化(Dual-Functional Radar-Communication system,DFRC)[10]。其中,前者考慮的是分立的雷達與通信系統共用同一頻譜,如何設計行之有效的干擾消除與管理技術來實現兩者的互不干擾。后者則考慮的是雷達與通信系統除了共享同一頻譜外,還共用同一硬件平臺,如何設計一體化信號處理方案來同時實現通信與雷達感知功能。RCC技術往往要求雷達和通信系統周期性地交換一些信息以實現合作互利,例如雷達的發射波形、波束圖樣,通信的調制方式、幀格式以及雷達與通信系統之間的信道狀態信息等等。在實際系統中,這一信息交換過程具有較高的復雜度。DFRC技術則直接通過共享硬件平臺實現了頻譜共享,并不需要額外的信息交換。此外,DFRC技術還能夠通過雙方的協同工作來同時提升二者的性能。如上文所述,當前,DFRC技術的內涵及應用已遠遠不止于對頻譜利用率的提升,而是被進一步拓展至包括車聯網、室內定位和隱蔽通信在內的多種新興的民用及軍用場景[11–14]。
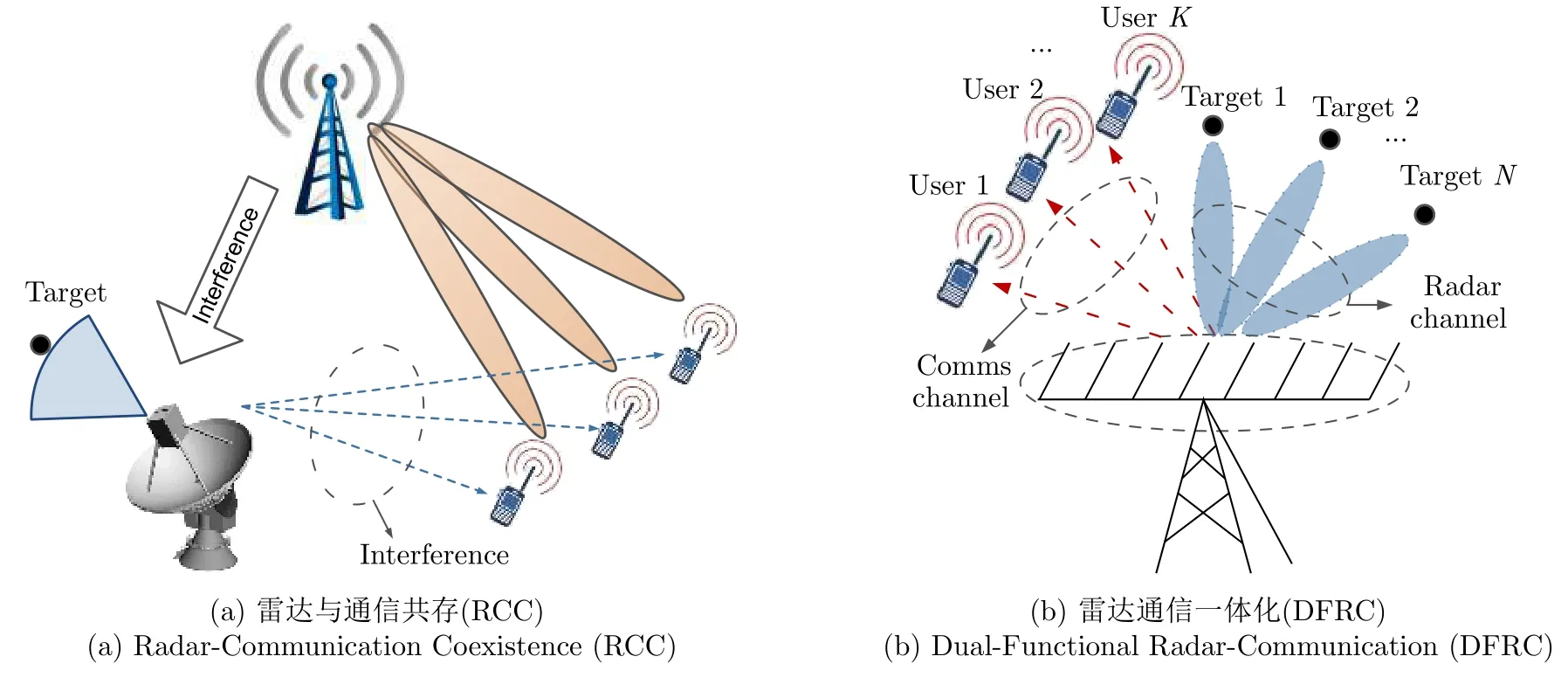
圖1 RCSS技術的兩條研究路徑Fig.1 The two research directions of RCSS
綜上所述,本文將首先簡要介紹RCC和DFRC技術的應用場景,再對兩種技術的最新研究進展進行綜述。
2 應用場景
2.1 雷達與商用無線通信系統的共存
本節給出不同頻段上雷達與商用通信系統頻譜共存的實例:
(1)L波段(1~2GHz)。該頻段主要被用于遠距離空中監視雷達,如空中交通管制雷達(Air Traffic Control,ATC)。同時也被分配給5G NR,頻分雙工LTE(Frequency Division Duplexing-LTE,FDD-LTE)等蜂窩通信系統,以及全球衛星導航系統(Global Navigation Satellite System,GNSS)的上下行鏈路[15]。
(2)S波段(2~4GHz)。該頻段通常用于高發射功率的機載預警雷達[16]。由于該頻段的電磁波對強降水等天氣較為敏感,諸多遠距離氣象雷達亦在此頻段上工作[5]。該頻段上的通信系統包括802.11b/g/n/ax/y WLAN網絡,3.5GHz TDD-LTE及5G NR[17]。
(3)C波段(4~8GHz)。該頻段對氣象變化更加敏感,因此被分配給大多數氣象雷達用于定位小/中雨[5]。該頻段亦可以用于戰場/地面監控和船舶交通服務[5]。處于該頻段的無線系統主要包括802.11a/h/j/n/p/ac/ax等WLAN網絡[18]。
(4)毫米波頻段(30~300GHz)。該頻段一般用于車載雷達,以實現防碰撞檢測、高精度成像等功能[19]。然而,值得注意的是,由于毫米波通信即將成為5G NR標準的一部分[20],該頻段在將來也會變得較為擁擠。目前,毫米波頻段也被廣泛用于802.11ad/ay等WLAN網絡[18]。
在以上共存實例中,蜂窩基站和空中交通管制雷達的互干擾作為一個長期遺留的歷史問題亟需解決[15]。在即將到來的5G網絡中,相同的問題仍然存在。
2.25 G車聯網毫米波定位
為滿足下一代自動駕駛車輛的指標需求,車聯網(Vehicle-to-everything,V2X)通信要求低時延的數據傳輸。一般通信系統可以將時延控制在幾百毫秒,而自動駕駛關鍵應用要求時延在10ms量級[11]。在同樣場景下,雷達感知應當能夠提供穩定可靠的厘米級高精度障礙物檢測及環境感知功能。在本文著述之時,汽車定位和聯網框架大多基于GNSS或默認標準,例如專用短程通信技術(Dedicated Short Range Communication,DSRC)[21]和進階長期演進技術(LTE-Advanced,LTE-A)的D2D模式[19]。盡管這些方案可以提供基礎的V2X功能,但均不能達到上文所述的要求。舉例來說,4G蜂窩網絡可以在10m的精度范圍內提供定位信息,時延一般高于1s,而這遠遠不能達到保障安全駕駛的要求[11]。
可以預見,5G通信技術將能夠利用大規模MIMO天線陣列和毫米波頻譜來滿足上述V2X網絡的定位與通信需求[22,23]。毫米波頻段具有充裕的可用帶寬,不僅可以實現更高的數據傳輸效率,也可以顯著提升距離分辨率。此外,大規模的天線陣列可以形成“鉛筆式”的窄波束,準確地指向車輛或者其他感興趣的目標所在方向。這可以補償毫米波信號的路徑損失,同時提高方位角的估計精度。更重要的是,由于毫米波信道的稀疏性,其僅包含少數多徑分量。與sub-6GHz頻段豐富的散射路徑相比,毫米波信道中雷達目標回波受到的雜波干擾要小得多,因此十分有利于對車輛的定位[11]。此外,利用雷達通信一體化傳輸,還可以進一步實現車輛的情景信息感知[24]。
綜上所述,有必要在車載平臺或者路邊單元(Road Side Unit,RSU)同時實現雷達感知與通信功能。現有的雷達通信一體化方案大多是針對sub-6GHz頻段設計。面向智能交通以及車聯網的毫米波雷達通信一體化方案則較少見諸報道。在此場景下,一體化設計將需要考慮諸多限制條件,例如毫米波信道、車輛的高動態以及軌跡約束等。
2.3 WiFi室內定位及動作識別
隨著物聯網的發展,對室內定位服務的需求與日俱增[12,25]。盡管GNSS技術在室外環境下非常適用,其性能在室內應用中將大打折扣。作為一種低成本的解決方案,WiFi室內定位系統(WiFi-based Positioning System,WPS)在近年受到了學術界和工業界極大的關注[12]。在WPS系統中,無線路由器收到用戶端發射的信號,并根據測量信號的到達時間(Time of Arrival,ToA)和到達角(Angle of Arrival,AoA)來推斷用戶端的位置。此外,定位信息還可以通過測量接收信號強度(Received Signal Strength,RSS)及其他信號特征來獲取。典型的信號特征包括頻率響應、I/Q信號幅度等。這些信號特性將與一個預先測量好的特征數據庫進行匹配,從而估計出一個最有可能的用戶端位置[26–28]。
為獲取包括人體動作在內的更多目標細節信息,WiFi路由器還能夠直接處理由人體反射或散射的目標回波。相比于傳統的WPS系統,這類系統更類似于一種雙站雷達。特別地,WiFi路由能夠從信道狀態信息(Channel State Information,CSI)提取因人體動作所引起的微多普勒頻移,從而識別人的行為[29]。這一技術的潛在應用將不僅局限于傳統的室內定位,還能夠拓展到包括老年人健康監測、情景感知、反恐行動和智能家居等一系列新型場景中[30–32]。值得一提的是,近期由谷歌先進技術項目組(Advance Technology And Projects,ATAP)主導的“Soli”項目采用了類似的思想,即利用手機搭載的毫米波雷達對人的手勢進行識別,從而實現無接觸式的人機交互[33]。
以上技術可以被視作利用WiFi網絡來實現一種特殊的雷達/感知功能,因而可以被囊括在雷達通信一體化領域中。為實現同時同頻的WiFi通信與定位,需要進一步發展先進的協同信號處理技術。
2.4 無人機感知與通信
在一些具有巨大數據需求量(例如球賽轉播、演唱會等)或災害應急場景(地震、火災等)中,無人機可作為空中基站來服務于地面用戶[34]。在這些場景中,無人機既需要感知環境獲得數據,又需要將這些數據傳輸給通信用戶。因此,感知與通信是無人機網絡兩個不可或缺的功能。無人機平臺上常用的攝像頭傳感器對包括光照強度、天氣等在內的環境因素較為敏感。與此相比,基于電磁波的雷達傳感器則能夠全天候使用,還能被用于無人機集群編隊和碰撞檢測/避免[35]。長期以來,無人機的通信與感知的研究是相互分離的。在感知與通信一體化技術方面少有以無人機網絡為背景的研究工作。雷達傳感器和通信收發機共享同一硬件平臺,將能夠有效地減小無人機的載荷,從而在降低能耗的同時提升無人機的機動性[36]。
另外,由于無人機可能被用來進行物理和網絡攻擊,其對基礎設施和人員也會構成威脅[37–39]。即使是民用無人機,無意間飛入禁區也可能造成嚴重的后果[40]。為了檢測和跟蹤未經授權的無人機,研究者提出了多種技術,例如雷達、攝像機和聲學傳感器。然而,部署專門用于偵測無人機的專用設備代價比較高昂[41]。因此,人們越來越需要利用現有的通信系統(例如蜂窩基站)來監視未授權的無人機,同時向已授權的用戶提供無線通信服務。因為這一部署不需要大量的額外硬件,從而有效降低了成本[42]。此外,通過將基站改造為低功率雷達,包含有大量微基站的未來超密集網絡(Ultra Dense Network,UDN)可以被用作城市防空系統,對未授權無人機威脅提供低空預警。
2.5 多功能射頻系統
從發展歷史來看,包括通信、電子戰(Electronic Warfare,EW)和雷達在內的艦載與機載射頻系統的開發是相互分離的。這些子系統的增長使得戰斗平臺的體積和重量以及天線陣列尺寸顯著增加。這會導致更大的雷達截面積(Radar Cross-Section,RCS),從而大大增加了被敵方偵測到的可能性。此外,這些子系統的共存不可避免地引起電磁兼容性問題,因而可能造成嚴重的相互干擾。為了解決這些問題,美國國防高級研究計劃局(Defence Advanced Research Projects Agency,DARPA)于1996年啟動了先進多功能射頻概念(Advanced Multi-function Radio Frequency Concept,AMRFC)項目,其目的是設計能夠同時支持上述多種功能的綜合射頻系統[43,44]。在2009年,海軍研究辦公室(Office of Naval Research,ONR)實施了一項后續項目,即集成上層建筑(Integrated Topside,InTop)計劃[45],這一項目的目標是基于AMRFC的結果進一步開發基于多功能射頻系統的寬帶射頻組件和天線陣列。
顯而易見,如何融合雷達與通信子系統是上述研究的核心問題。隨后,DARPA在2013年資助了一項名為“雷達和通信共享頻譜接入(Shared SPectrum Access for Radar and Communications,SSPARC)”的專用項目,并在2015年推進到第2階段[46]。這一項目的目的之一是釋放部分6GHz雷達系統的頻譜,以供雷達和無線通信共享使用。SSPARC的目標不僅包括軍事通信系統共享雷達頻譜,還包括民用無線系統共享雷達頻譜,這與上一節所討論的雷達與商用通信系統共存問題密切相關。
2.6 雷達輔助的低截獲概率(Low-Probability-of-Intercept,LPI)通信
許多通信應用都具有保密的需求。即在通信信息傳輸過程中應保護敏感信息,例如商業信息或關鍵設施的位置。因此,可以利用被截獲概率來刻畫保密通信的關鍵性能。傳統上,LPI是通過跳頻/跳時或擴頻方法來實現的,這需要大量的時間和頻率資源[47,48]。從雷達通信一體化的角度來看,一種更經濟的方法是將通信信號嵌入雷達回波中,以掩蓋數據傳輸[14,49,50]。
在上述場景中,LPI系統模型一般由散射目標、RF標簽/應答器和雷達收發器組成。簡單地說,雷達首先發射探測波形,這一波形可以被RF標簽在到達目標時捕獲。然后,RF標簽用通信信息對雷達信號進行重調制,再將其發送回雷達,該RF標簽自然會嵌入到所反射的雷達回波中[14]。在這一過程中,應當通過控制其發射功率以及與雷達波形的相關性/相似性來設計相應的通信波形。如此一來,由于通信信號隱藏在隨機的雜波和回波中,對其進行識別將非常困難。而雷達則可以利用一些先驗信息對通信信號進行解碼[49]。因此,通過精心設計的波形和先進的信號處理技術,可以在雷達感知、通信速率和信息保密性之間取得多種性能折中。
2.7 無源雷達 (Passive Radar,PR)
從更廣泛的角度來看,利用非合作通信信號進行目標探測的無源雷達可以被看作一種特殊的RCSS技術。這些信號源包括電視信號、蜂窩基站和數字視頻/音頻廣播(Digital Video/Audio Broadcasting,DVB/DAB)[51]。為了檢測目標,無源雷達首先接收一個從外部發射機發出,經視距路徑(通常稱為“參考信道”)傳輸的參考信號。同時,它會收到同一信號經由目標散射(稱為“監視信道”)后的散射信號[52,53]。與有源雷達系統類似,這些散射信號同樣包含目標的參數信息。因此,可以通過計算從兩個信道收集的信號之間的相關性來估計有關目標參數。
眾所周知,由于無源雷達在進行目標探測時保持靜默,其很難被定位或者受到干擾,因此十分適用于對隱蔽性要求較高的場景。此外,它不需要額外的時間/頻率資源,從而使得其成本和復雜度大大低于傳統的有源雷達設備。因此,無源雷達又被稱為“綠色雷達”[52]。然而,由于所使用的信號不是專門為目標檢測而設計的,并且發射源通常不受無源雷達的控制,其可靠性較差[52]。為進一步提高檢測概率同時保證良好的通信性能,可以采用RCSS技術進行聯合波形設計和資源分配[54]。
2.8 其他
除了上述場景外,還存在一些潛在的雷達通信一體化應用尚未引起人們的關注,舉例如下:
(1)無線射頻識別(Radio Frequency IDentifi cation,RFID)。典型的RFID系統由讀取器和RF標簽組成。RF標簽可以分類為有源或無源的,取決于其是否攜帶電池。在進行射頻識別時,讀取器首先向標簽發送詢問信號,標簽將該信號調制后返回給讀取器,該調制信號中包含有標簽天線陣列負載所形成的獨特信號特征,讀取器據此即可完成標簽的識別[55]。RFID技術具有類似雷達的傳輸機制,又通過背向散射通信在讀取器和標簽之間建立通信鏈路,所以可以在某種程度上視作雷達與通信的一體化。
(2)醫學傳感器。生物傳感器可被嵌入到人體內用來檢測人體的健康狀態。這些傳感器只能支持低功耗的感知功能,且計算性能有限。因此,一般需要將測量的原始數據傳輸到體外設施完成進一步的處理。如何在該領域實現通信與感知一體化仍然是一個開放問題[56]。
(3)雷達作為通信中繼。與傳統無線通信不同,大多數雷達信號的傳輸都具有高功率和高指向性,這些特性使得雷達非常適合作為通信中繼來使用。雷達可以將微弱通信信號放大后,轉發給遠距離通信用戶[57]。雷達通信一體化中繼技術將能夠在中/遠距離通信應用中發揮重要作用。
3 主要研究問題
本節對RCSS領域研究中存在的主要問題與挑戰進行梳理。
3.1 雷達與通信同頻共存的主要研究問題
總體而言,雷達通信同頻共存可看作一種特殊的認知無線電場景。與傳統僅包含通信系統的認知無線電不同的是,雷達與通信的同頻共存需要同時考慮雷達探測與通信的性能指標,并且還要針對雷達所獨有的工作模式進行優化設計。宏觀而言,這一領域所研究的問題可大致分為以下3類:
(1)干擾信道估計。為實現雷達與通信系統間的干擾消除,應首先對干擾信道進行估計。然而,與傳統的通信系統間基于導頻的信道估計不同,雷達所采用的工作模式、波形設計以及信號處理都與通信系統全然不同,因而傳統信道估計方法往往并不適用。此外,雷達系統往往存在安全與隱私的需求,與民用系統之間共享導頻信號進行合作式信道估計將有可能對其傳輸的安全性造成隱患,這就要求我們考慮非合作式的干擾信道估計方法。
(2)發射機設計。在獲取干擾信道信息以后,需要在發射端進行信號設計、波束成型和預編碼等操作,以克服雷達與通信之間的互干擾,并盡量保證兩者的性能指標不受太大影響。除通信的信號干擾噪聲比、誤碼率、通信速率等指標外,還需要考慮雷達的估計與檢測性能。相關性能指標包括檢測概率、虛警概率和估計誤差等。如何在認知無線電框架下對雷達性能進行分析與優化,是實現發射預編碼設計的關鍵。
(3)接收抗干擾設計。在雷達與通信共存場景下,接收機可能會同時收到雷達回波與通信信號。由于兩種信號處于同一頻段,往往需要對其進行分離,并對干擾信號進行抑制。例如在通信接收端,需要對雷達回波/散射波進行抑制,從而對通信信號進行低誤碼率解調;在雷達接收端,則需要識別并抑制通信信號,從而高精度地恢復目標回波。
3.2 雷達通信一體化的主要研究問題
相比雷達通信同頻共存,雷達通信一體化需要實現雷達感知與無線通信功能的深度融合,因此所涉及的問題更為基礎和本質。總體而言,我們可以將這一領域的研究分為以下3類:
(1)雷達通信一體化信息論。為了揭示感知與通信一體化的信息論本質,需要對雷達通信一體化信息論進行研究。與傳統香農信息論所不同的是,雷達探測具有不同的性能指標和極限。例如,目標檢測性能由檢測概率/虛警概率給出,目標參數估計方差的最優下界則由Cramér-Rao下界給出。需要在此基礎上建立新的感知通信一體化信息論,探明兩者的最佳性能邊界及性能折中。
(2)雷達通信一體化信號處理。雷達通信一體化的信號處理具體包括一體化波形設計、聯合發射波束成型、聯合信號接收等。總體可以歸納為時頻域和空域信號處理兩個方面。此外,從功能優先級的角度看,還可以將一體化信號處理思想分為以雷達為主的一體化設計(radar-centric),以通信為主的一體化設計(communication-centric)和聯合加權設計(joint design)3種類型。目前國內外對于雷達通信一體化的研究主要集中在信號處理這一方面,將在后文對相關研究現狀進行詳細綜述。
(3)雷達通信一體化協議及系統架構設計。從工作體制來看,通信一般采用時分或頻分雙工,而雷達則可大致分為脈沖式與連續波雷達。為實現雷達與通信體制的進一步融合,需要設計新的傳輸協議與系統架構,以實現雷達與通信功能的互不干擾甚至協同傳輸。此外,已有雷達通信一體化系統往往工作在sub-10GHz頻段。在未來的一體化應用場景,例如在車聯網、無人機集群等網絡中,將要在毫米波頻段對感知與通信功能進行融合,來同時提供高精度定位與高速率通信服務。因此,需要設計低成本、低復雜度和高效率的毫米波雷達通信一體化的新系統架構。
4 研究現狀
本節將對RCSS領域的研究現狀進行梳理和綜述,首先討論分立的雷達與通信系統的共存,再討論雷達通信一體化的相關研究進展。
4.1 雷達與通信同頻共存研究現狀
(1)機會頻譜共享。機會頻譜共享可以看作傳統認知無線電技術的一種簡單擴展,其中雷達是頻譜的主要用戶(primary user),通信系統則是次級用戶(secondary user)。這類方案通常要求次級用戶感知頻譜,并且在頻譜未被占用時進行傳輸[58]。為避免對雷達產生干擾,通信系統需要通過控制其傳輸功率來保證雷達接收到的干擾噪聲比(Interference-to-Noise-Ratio,INR)小于其能容忍的門限。在此基礎上,美國卡耐基梅隆大學的Saruthirathanaworakun等人[59]于2012年進一步考察了蜂窩通信系統的旋轉掃描雷達的同頻共存。在這一模型中,雷達天線的主瓣在不斷旋轉,從而通信系統可以在位于雷達旁瓣內時進行通信。他們考慮了在給定雷達所能容忍的干擾噪聲比要求下,基站與雷達之間的最短距離。同時,還計算了在此INR要求下基站對其下行用戶所能達到的信號干擾噪聲比(Signal-to-Interference-plus-Noise-Ratio,SINR),從而給出了機會頻譜共享場景下的下行通信速率,并分析了多種數據業務例如語音、視頻和文件下載在這一場景下的可行性及其性能。
值得注意的是,以上方案雖然易于工程實現,但無法真正實現雷達與通信系統在時、頻、空的資源共享。這是因為機會頻譜共享方案僅僅允許通信系統在一定條件下傳輸信號,在其他情況下則不能。這些條件通常包括:(a)雷達是否正在該頻段傳輸;(b)通信系統傳輸的信號功率是否會干擾雷達工作;(c)通信系統是否位于雷達波束圖樣的主瓣位置。因此,這一方案無法做到高效利用資源。此外,這些研究通常考慮的是機械式或相控陣掃描雷達與通信系統的共存,而這些雷達將在不久的將來為下一代集中式MIMO雷達所取代[60,61]。對比旋轉掃描雷達,MIMO雷達在進行目標搜索時通常發射全向正交波形,在進行目標跟蹤時又需要進行波束成型。這使得基站很難在MIMO雷達隨機切換其波束圖樣時識別其主瓣和旁瓣的位置。因此,需要采取更為先進的技術,例如預編碼,來消除雷達與通信系統的互干擾。
(2)干擾信道估計。在進行預編碼設計之前,首先需要獲取雷達與通信系統之間的干擾信道狀態信息(Interference Channel State Information,ICSI)。傳統上,可以通過雷達向通信系統發射導頻信號來估計干擾信道,而這將不可避免地造成計算資源和信號資源的浪費,且會影響雷達正常的目標探測等操作。文獻[62]進一步提出可以在雷達與通信系統之間架設一個控制中心來協調ICSI的估計和發射預編碼的設計。在雷達具有優先權的頻譜共享系統中,該控制中心還可以同時作為雷達的信息融合中心使用,并隸屬于雷達站進行管理,從而避免了將雷達信號參數共享給民用通信系統所引起的安全問題。然而,控制中心的建設成本往往較高。有鑒于此,文獻[63]提出一種新的雷達通信干擾信道估計方案,其核心思想是利用MIMO雷達的探測信號作為導頻,因此雷達不需要再額外發射導頻。由于MIMO雷達在目標搜索和跟蹤兩種模式間隨機切換,基站需要首先利用假設檢驗方法判別雷達的工作模式,然后再據此對信道進行估計。
(3)具有閉式解的預編碼方案。在獲取干擾信道以后,為保證雷達與通信系統真正同時同頻工作,且互不干擾,可以在雷達或通信端進行預編碼設計來消除干擾。與MIMO通信的迫零預編碼(Zero-Forcing,ZF)類似,一種較為簡單的具有閉式解的預編碼方案是所謂零空間投影預編碼(Null-Space Projection,NSP),最早見于2012年由美國弗吉尼亞理工大學Sodagari等人發表的文獻[64]。這一工作考慮了集中式MIMO雷達與MIMO通信接收機之間的共存問題,其預編碼設計在雷達端進行。具體步驟為:首先估計雷達發射機與通信接收機之間的互干擾信道。然后,通過奇異值分解(Singular Value Decomposition,SVD)得到信道的右奇異向量矩陣,利用其中對應奇異值為0的部分奇異向量矩陣構造投影矩陣,該矩陣可以將任意信號投影至信道的零空間(null-space)中。最后,利用該投影矩陣對雷達信號進行線性預編碼,即可保證其對通信接收機的干擾功率為0。可以看到,這一算法與MIMO通信中的SVD預編碼有諸多相似之處。所不同的是,這一操作勢必會對雷達的性能造成影響。根據作者的分析,MIMO雷達估計性能的Cramér-Rao下界(Cramér-Rao Bound,CRB)將會惡化[64]。這是因為當MIMO雷達采用正交波形時得到的CRB是最優的,而投影矩陣無疑破壞了這種正交性。后續文獻[65]中,作者進一步考慮了利用特征值矩陣中所有對應奇異值不超過某一門限的奇異向量構成的矩陣來設計預編碼矩陣。利用該矩陣進行預編碼后,雷達信號對通信系統造成的干擾將低于某一門限。作者同時指出,當特征值門限趨于無窮時,投影矩陣將趨近于單位矩陣,因此不會對雷達波形的正交性造成任何影響,同時卻無法控制對通信接收機的干擾大小。反之,如果將干擾降為0,則經過預編碼后的雷達波形將會嚴重失真。這正是雷達與通信性能的兩種極端情況。而隨著門限取值的變化,預編碼矩陣可以在通信與雷達性能之間進行權衡。2015年,在先前研究的基礎上,Khawar等人[66]進一步分析了NSP預編碼方法對MIMO雷達檢測性能的影響,給出了檢測概率(detection probability)性能曲線。
以上工作雖然能夠較好地利用預編碼設計解決雷達通信同頻共存,但也存在兩個較大的問題:(a)NSP預編碼對通信接收機造成的干擾大小依賴于信道的奇異值,而奇異值的大小無法人為控制,因而并不能真正將干擾最小化,或是降低到任意給定門限以下;(b)若待探測目標的方向恰與干擾信道的零空間對齊,則該目標將無法被雷達識別。這些缺陷迫使學界考慮利用凸優化(convex optimization)方法來實現雷達與通信的同頻共存。
(4)基于凸優化方法的預編碼設計。2016年,美國羅格斯大學的Li等人[67]首先考慮了利用凸優化技術實現P2P MIMO通信系統與矩陣完成MIMO雷達(Matrix Completion MIMO Radar,MC-MIMO Radar)之間的同頻共存問題。MC-MIMO雷達與普通MIMO雷達的不同之處在于,其僅對接收信號矩陣的部分元素進行采樣,然后在接收端利用矩陣完成算法近似恢復出完整的雷達信號,從而達到節省計算資源的目的[67]。文獻[68]對通信發射信號的協方差矩陣和雷達的次采樣矩陣進行聯合優化,用以最小化雷達端在對接收信號采樣后的等效干擾功率,同時滿足通信系統的發射功率以及容量約束。作者利用拉格朗日對偶分解(Lagrangian dualdecomposition)和交替最小化算法(alternating minimization)對相關問題進行了求解。2017年,Li等人[62]進一步將與信號相關的雷達雜波(signaldependent clutter)引入優化模型中,使其更符合雷達工作的實際情形。美國哥倫比亞大學的Zheng等人[68]考慮了脈沖式雷達(pulsed radar)與通信的共存問題。他們指出,在共存場景下,通信對雷達的干擾是持續不斷的,而由于脈沖占空比的存在,雷達對通信的干擾則是間歇性的。因此,他們給出了一種新的通信速率度量方式,即所謂的“復合速率”(compound rate)。該速率是存在雷達干擾時的通信速率與不存在干擾時的通信速率的加權和。在文獻[68]中,作者對通信信號的協方差矩陣以及雷達信號進行了優化,用以最大化通信的復合速率,同時滿足雷達和通信的發射功率預算,以及雷達的接收SINR門限。這一優化問題在雷達干擾滿足特殊條件時可被解析求解。
為進一步實現MIMO雷達與多用戶MIMO通信系統(Multi-User MIMO,MU-MIMO)的頻譜共存,文獻[69]給出了一種在不完美ICSI假設下的穩健預編碼方案,在最大化雷達的檢測概率的同時保證下行通信用戶的SINR約束條件。文獻[70]給出一種干擾對齊預編碼方案來實現多個雷達與多個通信系統之間的頻譜共享。文獻[71]則考慮了雷達估計性能的優化,在存在通信干擾的情況下,通過在雷達端進行預編碼來最小化目標估計的Cramér-Rao界。進一步地,文獻[72]給出了一種基于“建設性干擾”概念的通信端發射預編碼方案,即利用已知的通信用戶間干擾來加強下行用戶的接收SINR,同時最小化對雷達的干擾。仿真結果顯示,在相同的發射總功率約束下,相比于傳統預編碼方案,這一方案中通信系統的性能得到極大提升,同時雷達收到的通信干擾顯著減小。
(5)接收機設計。在本節最后討論了雷達通信共存場景下的接收機設計方案。這一接收機需要在存在雷達干擾的情況下解調通信信號,或是在存在通信干擾的情況下對雷達目標進行估計。目前,這方面的主要工作都集中在通信接收機的設計上。文獻[73]首先考慮了在雷達與通信非協作情況下的通信接收機設計。在這一模型中,通信接收機在有多個未知雷達干擾源的情形下工作,并嘗試解調通信信號。他們首先證明,在某種表示域下,通信系統接收到的雷達干擾是稀疏(sparse)的。同時,在迭代式解調算法中,解調錯誤將隨著迭代次數的增加變得更加稀疏。綜合這兩點后,他們提出了基于壓縮感知(compressed sensing)和原子范數(atomic norm)約束的優化算法,以實現聯合解調及雷達波形估計,由此消除雷達信號干擾并恢復通信信號。仿真結果顯示,這一算法可以使通信接收機獲得較好的誤符號率(Symbol Error Rate,SER)性能。
在典型共存場景下,通信系統將周期性地收到雷達的干擾脈沖,這類脈沖信號通常具有較高的幅度和較窄的時間寬度。因此可以將通信接收機收到的雷達干擾近似建模為具有恒定幅度的加性信號。雖然干擾信號的幅度可以較為準確地進行估計,但由于雷達信號的隨機時延,其相位將難以進行估計。文獻[74]考慮了在雷達干擾信號的幅度已知相位未知情況下的通信接收機設計問題,主要包括:(a)在給定通信星座圖的情況下,如何根據最大似然準則決定最佳的判決域;(b)如何設計自適應的最優星座圖來最小化通信的誤符號率。仿真結果顯示,在低功率雷達干擾下,最優星座圖呈同心六邊形形狀;在高功率雷達干擾下,最優星座圖為非等間距的脈沖幅度調制(Pulse Amplitude Modulation,PAM)。
4.2 雷達通信一體化研究現狀
(1)雷達通信一體化系統的信息論研究。為了研究雷達通信一體化系統所能達到的性能極限,必須在統一的理論框架下對兩種系統的性能度量進行討論。這就要求使用信息論來對其進行分析。這其中的一個關鍵問題是,如何給定雷達系統性能的信息論度量。眾所周知,傳輸速率是衡量通信系統性能的重要指標。通信發射符號一般取自一個可數的離散星座圖(constellation)。假設星座圖的大小為N,則每一個星座點包含了log2N比特信息,因而可以用比特率(bit rate)來對通信速率進行度量。與通信系統相反,雷達系統發射的信號并不是取自一個離散的星座點集,且其本身并不包含信息。只有在被待探測目標反射回來后,才會在回波中攜帶目標的信息。因此難以將比特率這樣的概念用到雷達系統中。注意到,在點目標模型下,雷達通常需要估計目標的距離、速度和方位角這3個重要參數,分別對應于雷達信號的3個維度:快時間域(fast time,即單個脈沖內時間)、慢時間域(slow time,即脈沖個數)和空間域。在這3個維度,可以將信號經過采樣后劃分為多個分辨單元,每個單元對應了一個特定的目標距離、速度和角度。而對回波的處理,就是通過脈沖壓縮、傅里葉變換和接收波束成型等操作,判斷其在哪個單元內具有最大的響應,從而將該分辨單元作為目標參數的估計[75]。這就啟發我們,可以將每一個分辨單元視作一個“星座點”,從而對雷達獲取目標信息的“速率”進行度量。這一思想最先由美國的Guerci等人[76]在2015年提出。進一步注意到,通信系統的傳輸速率極限由香農容量給定,而香農容量定義為發射端到接收端的最大互信息(mutual information)。那么雷達系統中是否存在與之對應的性能界呢?一個自然的聯想是雷達的Cramér-Rao下界。根據參數估計理論,CRB是所有無偏估計器的性能下界。換言之,CRB給出了參數的無偏估計所能達到的最小方差[77]。如果將方差視為對參數估計量的不確定性,那么,類似于通信系統中互信息的概念,可以將雷達對“目標參數不確定性的消除”定義為雷達與目標之間的互信息,亦即雷達與目標之間的“信道容量”。基于這一認識,2016年,美國亞利桑那州立大學的Chiriyath等人[78]定義了雷達的“估計速率”(estimation rate),并利用上述方法導出了估計速率的上界。在文獻[78]中,他們考慮一種雷達通信一體化接收機,該接收機同時處理雷達信號的回波以及通信用戶的上行信號,因而可以被看作一種特殊的多址信道。與此同時,他們類比通信系統中對多址信道的分析方法,分別考慮了時分、頻分、串行干擾消除(Successive Interference Cancellation,SIC)以及注水(water-filling)體制下,雷達的估計速率與通信的比特率之間的性能權衡曲線。2017年,文獻[79]進一步給出了一種加權頻譜效率,通過對一體化系統的雷達和通信功能分別賦予一定的權重,來計算二者頻譜效率的加權和,并以此作為一體化系統的一種綜合性能度量。2018年,文獻[80]針對多天線一體化系統進行了分析,并給出了其估計速率的定義。
(2)雷達通信一體化系統的時頻域信號處理。雷達通信一體化系統的一個核心問題就是一體化波形設計,即設計一種新型復用波形,使之既能攜帶通信信息,又能用于雷達目標探測。早期的雷達通信一體化波形主要集中在對時頻域信號的處理上。其中,最早的一體化方案可以追溯到1963年,Randall提出利用雷達脈沖對通信數據進行調制的單向通信系統。該系統利用地面雷達向導彈發射脈沖組,每個脈沖相對于參考脈沖的位置不同代表不同意義,也即利用脈沖組攜帶了信息[81]。2003年,加州大學洛杉磯分校的Brown等人[82,83]率先提出了利用斜率相反的Chirp信號調制通信信息的雷達通信一體化系統,由于相反斜率的Chirp信號之間存在準正交性,因而可以將雷達與通信信號區分開來。2008年,瑞典布京理工學院的Jamil等人[84]提出利用Oppermann多相序列擴頻碼來區分雷達探測功能和通信功能,他們得出Oppermann序列有較好的自相關性和較小的互相干性,模糊函數具有較好的多普勒容忍性,在通信方面具有多址的能力,非常適合作為雷達通信一體化波形。
2009年,德國卡爾斯魯厄理工學院的Sturm等人[85]提出了基于正交頻分復用(Orthogonal Frequency Division Multiplexing,OFDM)的雷達通信一體化系統,并提出了對OFDM通信波形的雷達處理方案,該方案利用快速傅里葉逆變換(IFFT)算法和快速傅里葉變換(FFT)算法分別估計距離與速度,能夠實現距離域與多普勒域的解耦,具有極佳的性能。2010年,美國邁阿密大學的Garmatyuk等人[86]也提出了OFDM雷達通信一體化信號的處理方式。2010年,加拿大蒙特利爾大學的Han等人[87]提出了基于時分雙工體制的雷達通信一體化系統,該體制將系統工作時隙劃分為雷達時隙與通信時隙,雷達使用正斜率-無斜率-負斜率變化的線性調頻波形,通信則可使用任意調制方式,通信周期和雷達周期交替出現,在時域上互不干擾。2011年和2012年,Sturm等人[88]和Han等人[89]分別發表綜述性論文。總結了截止到當年學術界有關雷達通信一體化波形設計的研究與進展。Sturm等人將一體化波形分類為線性調頻體制、擴頻碼體制與OFDM體制,并對這幾種方案分別做了仿真分析,得出OFDM體制是性能最佳的一體化波形這一結論。2016年,英國思克萊德大學的Gaglione等人[90]提出利用分數階傅里葉變換(Fractional Fourier Transform,FrFT)替代OFDM中的離散傅里葉變換(DFT),從而可以將正弦載波替換為Chirp信號載波,同時實現雷達功能和通信功能。國內方面,在王小謨院士的指導下,中國電子科學研究院的Chen等人[91]于2011年提出一種結合Chirp信號與MSK調制的恒包絡一體化波形,稱為LFM-MSK信號,并在文獻[91]中分析了這種波形的雷達模糊函數。2015年,北京理工大學的文獻[86]在此基礎上進一步給出了LFM-MSK的時頻分析。由于調制了隨機通信數據,LFM-MSK信號的雷達匹配濾波將出現較高副瓣。為此,劉志鵬[92]還提出一種加窗反卷積方案來對副瓣進行消除。近期,國內對基于OFDM體制的雷達通信一體化也有諸多研究,例如西安電子科技大學的劉永軍[93]提出了MIMO-OFDM體制下的雷達通信一體化信號處理方法,西安電子科技大學的劉冰凡等人[94]進一步結合了LFM和OFDM體制,給出了一種不影響波形正交性的一體化波形設計。為了增加信號的傳輸距離,使得發射機能夠滿功率工作在功放的飽和區而不引起信號失真,需要進一步降低OFDM一體化信號的峰值平均功率比(Peak-to-Average Power Ratio,PAPR),甚至設計恒包絡的OFDM信號。這方面的研究與討論見文獻[95]和文獻[96]。
(3)雷達通信一體化系統的空域信號處理。通過對上述工作的總結可以看出,基于時頻域分析的單天線雷達通信一體化波形設計已經有了較為充分的研究。然而,隨著4G和5G通信技術的發展,MIMO技術已被廣泛應用于各類民用通信系統中。為實現雷達與MIMO通信系統的結合,在空間域上對一體化波形進行分析與設計是一種必然趨勢。近年來,MIMO雷達在學界得到了廣泛的研究。與MIMO通信類似,MIMO雷達也利用多天線得到更高的分集增益和自由度,極大提升了信號處理的性能。兩種技術之間的相似性提供了結合M I M O 雷達與MIMO通信的可能性。這一方向的文獻主要見于美國維拉諾瓦大學Amin等人的相關研究。2006年,澳洲的Donnet等人[97]首先提出了結合MIMO雷達與OFDM通信的設想。2015年,Hassanien[98]首次提出在視距信道內利用MIMO雷達發射波束圖樣的副瓣進行通信的方案。具體而言,這一方案利用發射波束成型來調整副瓣的高度,用于表示不同的通信符號,相當于對其進行了幅度調制。通信接收機則利用能量檢測來判斷收到的符號是“1”還是“0”。一體化系統利用主瓣進行目標探測,利用副瓣進行通信,因此其雷達功能基本不受影響。為提升通信速率,并將這一方案拓展至多用戶通信場景,2016年,Hassanien等人[99]考慮MIMO雷達發送Q個正交波形,可以在一個脈沖內代表Q個比特,并利用兩個加權向量對發送波形加權,使得合成波形擁有相同的主瓣和不同的旁瓣,用以區分二進制數據,且不影響雷達性能。再進一步假設有N個通信用戶分布在N個角度,于是需要使得這N個角度的副瓣產生高低變化。同年,文獻[100]提出一種在MIMO雷達中利用相位調制傳輸通信信息的方案,具體是利用不同的加權向量表示不同的相位,其中有一個加權向量為基準向量,其他加權向量乘以方向矢量后與它和方向矢量乘積的比值的相角即為PSK符號。后續文獻[101]提出通過交換雷達波形在不同天線上的位置來進行通信,亦即利用置換矩陣(permutation matrix)攜帶了信息。這一方案對于雷達的發射波束成型性能沒有任何影響,因為雷達波形本身沒有發生任何變化。2017年,美國堪薩斯大學的Mccormick等人[102]利用凸優化方法設計MIMO一體化信號,使得在最小化發射功率的同時,能夠將雷達信號和通信信號分別發射至指定角度。值得注意的是,這一優化問題可以解析求解。進一步地,還可以利用交替投影算法來逼近指定的恒包絡參考波形,使一體化信號滿足恒包絡特性。同年,在其后續工作[103]中,Mccormick等人[102]利用基于軟件無線電的硬件平臺,演示驗證了文獻[102]中的一體化波形設計方法。這也是MIMO雷達通信一體化波形首次得到硬件試驗驗證。
在以上MIMO雷達通信一體化方案中,注意到一個通信符號通常由一個或多個雷達脈沖所表示,這使得通信速率基本上與雷達的脈沖重復頻率(Pulse Repetition Frequency,PRF)相當,從而只能支持kbps-Mbps速率的通信應用,難以提供Gbps級別的傳輸速率。此外,基于雷達副瓣調制的一體化方案僅能支持視距通信。這是因為在非視距信道中,由雷達副瓣發送到通信接收機的符號將會受到其他方向到達的多徑干擾而產生嚴重失真。因此,文獻[104]討論了在非視距信道下MIMO雷達與MU-MIMO通信系統的一體化波束成形問題。其中,通信信號被直接用于雷達探測,一個通信符號即代表一個雷達快時間采樣點,因此不會影響下行通信速率。通過優化設計一體化波束成形矩陣,可以在產生符合雷達探測要求的波束圖樣的同時滿足下行通信用戶的SINR約束。文獻[105,106]進一步討論了MIMO雷達通信一體化系統的恒包絡波形設計問題,其目的是在最小化通信用戶間干擾的同時,滿足雷達波形的相似性約束和恒包絡約束。作者提出一種快速的分支定界算法來求解非凸優化問題,該算法能夠在短時間內找到全局最優解。
(4)5G時代的雷達通信一體化系統。盡管學界已對雷達通信一體化進行了充分的研究,現有的一體化方案大多基于sub-6GHz系統及相關應用。為應對無線設備與服務的爆炸性增長,5G網絡將利用毫米波頻段的大帶寬來成百上千倍地提高容量。與此同時,5G時代的毫米波基站將被賦予感知功能,可被用于包括V2X網絡在內的多種新興應用場景。目前,毫米波頻段的雷達通信一體化是該領域的一個新的研究方向。文獻[107,108]提出利用60GHz頻段的IEEE802.11ad WLAN協議來實現雷達感知功能。由于WLAN協議一般基于室內場景,且適用于小規模天線陣列,其只能支持較短距離的目標探測。為克服毫米波信號較高的路徑損耗,通常需要采用大規模天線陣列(mMIMO)來進行波束成形。更進一步地,mMIMO陣列的高自由度使得毫米波頻段的雷達通信一體化成為可能。文獻[109]首次分析了mMIMO雷達的檢測性能。其仿真結果顯示,mMIMO雷達僅需要單個雷達信號快拍即可達到采用多快拍的普通MIMO雷達的性能,且不易受到未知干擾的影響。
值得注意的是,毫米波和大規模天線陣列所帶來的性能增益建立在更高的硬件和計算資源消耗上。在全數字大規模天線陣列的情形下,由于所需要的毫米波射頻鏈路數量巨大,這一資源消耗將尤其顯著。為解決這一問題,通常在毫米波基站中采用所謂的模數混合波束成型結構[110–113]。此結構僅需少量射頻鏈路,通過移相器網絡與大規模天線陣列相連接,而不需要每根天線都與一個單獨的射頻鏈路相連,從而達到降低射頻鏈路成本和功耗的目的[114]。注意到這一思想不僅在通信領域,也在雷達領域的研究中有所體現,即所謂的phased-MIMO雷達[115]。這種雷達結合了相控陣雷達和全數字MIMO雷達的優勢,將天線陣列劃分為多個子陣列,在子陣列之間傳輸獨立的數字波形,在子陣列上進行相控陣波束成型[116]。如此一來,在保留了MIMO雷達高自由度的同時,可以通過控制子陣列的相位來將信號能量集中在感興趣的目標方向,從而提高回波的信干噪比。與通信中的混合模數陣列類似,phased-MIMO雷達能夠在全數字和全模擬波束成型之間取得性能折中。
考慮到混合波束成型與phased-MIMO雷達之間的天然聯系,在5G毫米波基站中融合兩種技術具有極大的潛力,且有助于多種新興應用的發展,包括車聯網和massive MIMO定位等。目前已有工作中,文獻[117]提出了一種基于毫米波混合波束成型架構的雷達通信一體化系統,并討論了其信道估計、上下行通信、雷達目標搜索與跟蹤等多個方面的一體化傳輸與接收算法。單個模擬天線陣列通常用來生成定向的窄波束,在雷達通信一體化系統中,這種使用方式使得雷達探測方向局限于通信方向。為了支持不同方向的通信和目標探測,文獻[118]提出了一個多波束方案:單個模擬陣生成的波束包含兩個以上的主瓣,除非通信和雷達掃描方向重合。其中一個方向固定的子波束指向通信接收機,剩余一個或多個子波束每個數據包改變一次方向用作雷達掃描。波束生成和更新、雷達探測的算法都在文獻[118]中做了探討。兩個子波束的多種共性合成的方法在文獻[118–120]中做了深入研究,以實現在同時滿足通信和雷達性能要求下的多波束波形優化。波束成形的系數量化方法和性能分析在文獻[119]中做了探討。國內方面,電子科技大學的羅渝悅對混合波束成型體制下的雷達通信一體化傳輸方法進行了總結[121]。文獻[122,123]進一步提出利用大規模MIMO毫米波基站作為路邊單元,對多個車輛同時進行定位與通信。由于采用雷達回波對波束成型進行輔助,相比傳統的基于純通信協議的波束跟蹤能夠極大地減少導頻的開銷,從而提升了通信速率。
5 結論與展望
本文圍繞雷達通信頻譜共享(RCSS)的兩個研究方向,即雷達通信共存和雷達通信一體化,做了深入而全面的綜述。本文首先列舉了RCSS技術的多種應用場景,然后分別對共存系統與一體化系統的最新研究進展進行了梳理。盡管在這兩方面都已有相當多的研究工作,本領域仍然存在一些挑戰和開放問題亟待解決,舉例如下:
(1)安全和隱私問題。在共存場景下,商用通信系統經常需要與雷達共享頻譜,這使得敏感信息存在泄漏的風險。在一體化場景下,雷達目標有可能是潛在竊聽者,能夠截取包含通信信息的雷達探測波形。為應對這些情況,需要進一步發展與RCSS技術相匹配的物理層安全技術[124–126]。目前在一體化系統的物理層安全方面有一些初期的工作,可參見文獻[127–130]。
(2)機器學習方法。在雷達通信一體化接收機設計中,一個最重要的問題就是如何在噪聲和干擾存在的情況下區分雷達與通信信號。傳統的信號處理方法適用于信號模型比較精確的場景,在模型未知的場景下,往往需要采用機器學習方法來完成信號分類的工作。例如,如果雷達與通信信號在統計特性上存在區別,可以采用獨立成分分析(Independent Component Analysis,ICA)進行分類。文獻[73]提出了基于壓縮感知理論的算法來進行兩種信號的分類與處理。
(3)通信與感知一體化信息論。為刻畫雷達通信一體化系統的性能極限,需要發展通信與感知一體化的信息論來統一兩者的數學模型。目前,已有工作提出了“估計速率”來描述雷達的估計性能,然而,這一指標與雷達的常用性能指標,例如檢測概率、虛警概率和均方誤差等聯系尚不明確。因此還需要進一步考慮基于雷達實際功能的信息論性能指標,并進一步揭示其與通信信息論的聯系。
(4)面向高動態場景的新型一體化波形。在未來高移動性場景中,多普勒頻偏對現有基于OFDM技術的雷達通信一體化信號的通信性能產生嚴重影響。這對能有效抵抗快速移動環境的新型信號波形設計提出了要求。目前,有學者提出了基于正交時頻空間(Orthogonal Time Frequency Space,OTFS)的新型調制方式,通過在時延-多普勒域傳輸信號有效解決時變信道的影響。有關OTFS的初步研究可以參考文獻[131,132]。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25