基于5G通信的調車作業安全防護技術研究
2021-07-08 07:39:02孟甲元
鐵道通信信號 2021年6期
孟甲元
隨著國鐵集團對無線調車機車信號和監控系統(以下簡稱“STP”)設備專項整治行動的開展,STP在全路得到了大規模的推廣應用。作為重要的調車作業技防設備,STP有效防止了專用調車機調車作業過程中“擠道岔”“沖撞土擋”“脫線”等事故的發生,在保障調車作業安全的同時,有效提高了站場整體作業效率。以2017年全路行車安全一般D類事故統計(共計150件)為例,所發生的調車作業事故(30件)均為本務機車調車或未配備STP的專用調車機調車所導致,未發生配備STP的專用調車機調車作業責任事故。
由車載設備和地面設備組成的STP,車地間通過無線通信方式完成調車機車信號、行車許可、機車工況、命令執行結果、站場顯示和調車作業通知單等信息的交互。既有無線通信采用數傳電臺或GSM-R網絡實現,除太原局集團有限公司和上海局集團有限公司部分車站應用的STP采用GSM-R網絡進行車地通信外,全路絕大部分車站應用的STP仍基于數傳電臺(主要采用450 MHz、400 MHz、230 MHz、160 MHz、150 MHz等頻段)進行車地無線通信[1]。隨著國家對5G建設工作的全面推進,5G-R在鐵路上的應用也逐漸開展。作為鐵路運輸過程的重要組成部分,調車作業的安全直接關系車站整體運輸安全,因此研究5G在調車作業安全防護領域的應用顯得尤為重要。本文正是基于此目的研究基于5G網絡傳輸技術的調車作業安全防護技術方案。
1 STP通信及調車作業安全防護現狀分析
1.1 既有STP通信現狀分析
1)STP基于數傳電臺傳輸技術進行車地無線通信,具有控制簡單、通信延遲小、實時性高、便于自組網等優點。但也存在以下缺點:天線安裝施工量較大,且對雷電防護要求較高;傳輸距離受環境的影響較大,工作頻段易受非法信號干擾;半雙工通信機制,單一地面設備同時控車數量相對有限。
2)STP基于GSM-R網絡傳輸技術進行車地無線通信,具有可靠性高、安全性好的優點。GSM-R基站的天線較高,其覆蓋的范圍廣,不易受干擾,且有完備的防雷設施[2]。另外GSM-R系統電路交換數據模式采用點對點的全雙工通信,STP的車地間通信不需要采用效率較低的輪詢方式。但與數傳電臺相比,GSM-R傳輸速率偏低,且目前普速車站GSM-R承載業務趨于飽和,沒有額外的通信資源用于STP,甚至部分車站沒有GSM-R網絡覆蓋。此外,自2025年起,G網設備供應商將停止對GSM-R設備的升級和技術支持[3]。因此,STP基于GSM-R網絡數據傳輸技術尚難以在全路推廣應用。
3)2017年,中國鐵路總公司發布《鐵路站場寬帶無線接入系統總體技術要求(暫行)》(鐵總運〔2017〕48號)[4]后,鄭州局鄭州北站、南寧局南寧南站、哈爾濱局哈爾濱南站等陸續進行了基于1 800 MHz頻段LTE寬帶集群的寬帶無線接入系統的試點應用,主要用于車務應急指揮、貨檢、語音通話等業務,未見STP或其他調車作業技防設備接入相應LTE網絡運行的報道,且寬帶無線接入系統建設需綜合考慮投資、運營、管理、維護等多方面因素,尚未在全路推廣建設,STP基于LTE網絡傳輸技術也尚未得到廣泛應用。
此外,除了基于數傳電臺、GSM-R網絡、LTE網絡完成調車技防設備車地通信外,部分調車作業技防設備采取其他無線通信技術完成車地通信,如自建WiFi,相對來說站場需要布置較多無線接入點,建設成本和維護成本均較高;采用公網4G,受到移動基站覆蓋、峰值網速受限、網絡信息安全等限制,均未在全路大范圍推廣應用。
1.2 既有調車作業安全防護現狀分析
1)基于STP的調車作業防護現狀。STP控制范圍為車站平面調車作業的集中聯鎖控制區,適用于進行平面調車作業的機車。在正常調車監控條件下,按照《列車運行監控裝置(LKJ)控制模式設定規范》設定的條件實現監控功能[5?6]。STP有效保證了站場集中區內進行平面調車作業的機車調車作業安全,但仍存在如下問題[7]:初次進入存車線,無法對存車線內存留車進行防護;單一地面控制區域內同時作業機車較多時,控車效率會下降。
2)其他調車作業安全防護現狀。在全路8 000多個車站中,仍有超過一半的中間站、專用線、段管線等存在大量無信號聯鎖的非集中區。非集中區往往具有線路多、環境復雜、調動車型復雜、進路準備繁瑣、盡頭式推進調車等特點,調車機車在該區域內的調車作業完全依靠人控,缺乏有效的技術、設備保障安全。調車作業過程中擠道岔、沖撞土擋、撞壞大門等事故時有發生,嚴重時直接威脅作業人員生命安全[8?9]。此外,全路20 000多臺本務機車和10 000多臺自輪運轉特種設備(軌道車)在站場內進行調車作業時,也缺乏行之有效的調車作業防護設備,也是導致本務機和軌道車調車作業冒進信號、越出站界、沖撞土擋等事故頻發的原因[10]。
2 基于5G通信的調車作業安全防護技術
2020年03月24日,工業和信息化部發布《關于推動5G加快發展的通知》(工信部通信〔2020〕49號),全力推進5G網絡建設、應用推廣、技術發展和安全保障,充分發揮5G新型基礎設施的規模效應和帶動作用,支撐經濟高質量發展,將進一步推動5G實現建設好、應用好、發展好的良好生態。十四五期間,中國鐵路通信發展有3個重要方向:一是以5G技術為引領,全面推進鐵路通信技術換代升級;二是聚焦關鍵業務和應用,深化鐵路5G專網組網技術研究;三是統籌5G專網建設和信息化應用。
2.1 安全防護技術分析
作為當前世界最先進的網絡通信技術之一,相比較4G通信技術而言,5G通信具有大帶寬、高速率、大容量、低時延等優點。基于5G的車地通信不僅只是通信速率、通信帶寬的提升,更多的關注點應落腳于對既有調車防護技術控制架構的優化,以及對既有車地通信技術不足的彌補,而不是簡單將車地通信技術升級為5G通信技術而已。針對5G通信技術特點,基于5G通信技術的調車作業安全防護技術的提升主要在如下幾個方面[11]。
2.1.1 大帶寬、高速率
理論上講,5G網絡傳輸速率是4G網絡傳輸速率的近百倍,傳輸速率的提升將大大縮短數據傳輸過程所需的時間,而傳輸穩定性的提高將使設備對工作環境的復雜場景適應性明顯加強。基于5G網絡傳輸技術對既有調車作業安全防護技術提升體現在以下方面。
1)優化并提升系統控車邏輯。受限于數傳電臺的半雙工機制,為保證對控制范圍內的多臺調車機的同時控制和車地信號應變時間符合要求,既有STP采取周期性輪詢機制,由地面控制設備控制輪詢周期,具體輪詢過程見圖1。一般情況下,單一地面控制中心同時控制的入網機車數目不超過5臺,如果出現多臺本務機車和軌道車在該區域同時作業時,系統控制效率將明顯下降。基于5G網絡通信后,STP整體控車邏輯將由半雙工輪詢機制升級為實時全雙工機制,控車邏輯的改變將使控車效率得到明顯提升,同一控制區域同時受控的作業機車數量將完全滿足站場內調車作業防護需求。

圖1 基于數傳電臺通信時的STP輪詢發送過程
2)優化并提升系統安全邏輯。受限于數傳電臺傳輸速率和通信延遲,在確保安全的前提下,為保證車地通信的實時性,既有STP將車地通信數據盡可能壓縮處理以減少通信數據量。基于5G網絡通信后,STP通信數據碼距可明顯加長,車地通信數據抗干擾能力加強,數據安全性更有保障。以信號機為例,加長碼距后的信號機狀態定義,可以用4個甚至更長字節表示單一信號機不同狀態信息,與既有STP相比,碼距提高十倍甚至更高,顯著提高傳輸錯誤時的檢錯概率。
此外,既有車地通信顯示數據和控制數據傳輸時間縮短后,系統可以增加車地通信信息,并將每個控制周期剩余時間更多用于主備系運行比較、系內邏輯檢查、雙系信息交互和整體狀態監測等安全相關內容;且可以縮短既有通信周期時間設置,加快車地數據交互頻率,明顯提高系統控車精度和動作響應時間。
2.1.2 大容量、低時延
1)填補物聯網設備采集狀態接入STP聯控的空白。基于5G網絡通信后,站場大規模的物聯網采集設備(智能鐵鞋、脫軌器、非集中區道岔狀態、機務段股道自動化設備狀態、軌旁設備狀態、存車線存留車檢查、作業人員人身定位等)接入調車作業安全防護系統成為可能,通過豐富STP控制信息來源,提高STP在調車作業全過程中的控制效率。
2)填補車載和軌旁智能感知設備信息采集和傳輸的空白。基于5G網絡通信后,可通過圖像識別、雷達點云數據等智能感知技術,探測車列前方的車輛、人員、脫軌器等障礙物;通過機器視覺、激光雷達等,智能感知線路實時情況,實時探測存車位置,精確測量對位距離,實現對存車線內存留車作業的防護;通過運行進路上視頻監控圖像的實時傳輸,實現司乘人員的超視距瞭望和調度指揮人員的實時作業監控,為調車機車遠程遙控駕駛和自動駕駛奠定技術基礎。
2.2 安全防護技術架構
基于5G通信的調車作業安全防護技術采用分層分布式架構,整體技術架構分為通信控制層、命令執行層、狀態感知層、決策控制層、綜合監控層。整體技術架構見圖2。
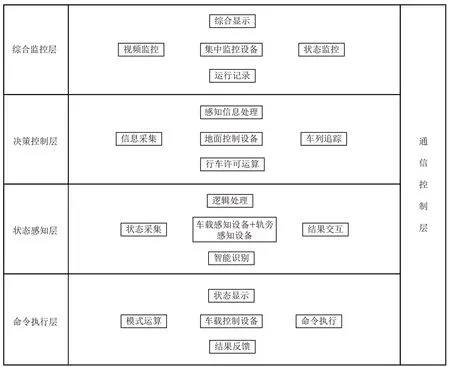
圖2 整體技術架構
其中,通信控制層控制系統內各子系統之間的通信,移動設備之間采用5G通信;固定設備間施工難度較大的,也以5G通信為主,施工難度較小的,以光纖通信為主。命令執行層除實現既有STP監控功能外,還包括車列前方超視距瞭望顯示、控車模式曲線動態運算、遠程駕駛和自動駕駛執行結果實時反饋等。狀態感知層包括機車兩端和作業車列前端的視頻圖像和雷達點云數據的融合計算、站場內物聯網設備狀態采集、軌旁感知設備探測數據處理、關鍵目標和障礙智能識別等。決策控制層包括計算機聯鎖信息、股道自動化信息、非集中區信息采集、車列位置實時追蹤、行車許可自動運算、站場感知信息融合處理、作業人員自動定位等。綜合監控層實現對站場內作業機車、作業人員、物聯網采集設備實時位置、運行軌跡和工作狀態的全程監控和顯示,以及對相關監控和顯示數據的存儲和查詢。
2.3 安全防護關鍵技術
1)環境感知:基于圖像及雷達點云數據融合運算的行車障礙物識別及測距技術。車載環境感知和軌旁環境感知的結構如圖3所示,通過在機車兩端、運行車列前端和站場軌旁,加裝視頻采集設備、激光雷達、毫米波雷達等感知設備,將視頻圖像數據和雷達點云數據經過預處理、配準和融合后,利用深度學習算法自動識別作業車列前方的鐵路軌道、機車車輛、作業人員、鐵鞋、動物及其它較大障礙物,并探測車列前端距各障礙物的距離,將識別結果傳給地面控制設備和車載控制設備[12]。環境感知與障礙物測距見圖4。
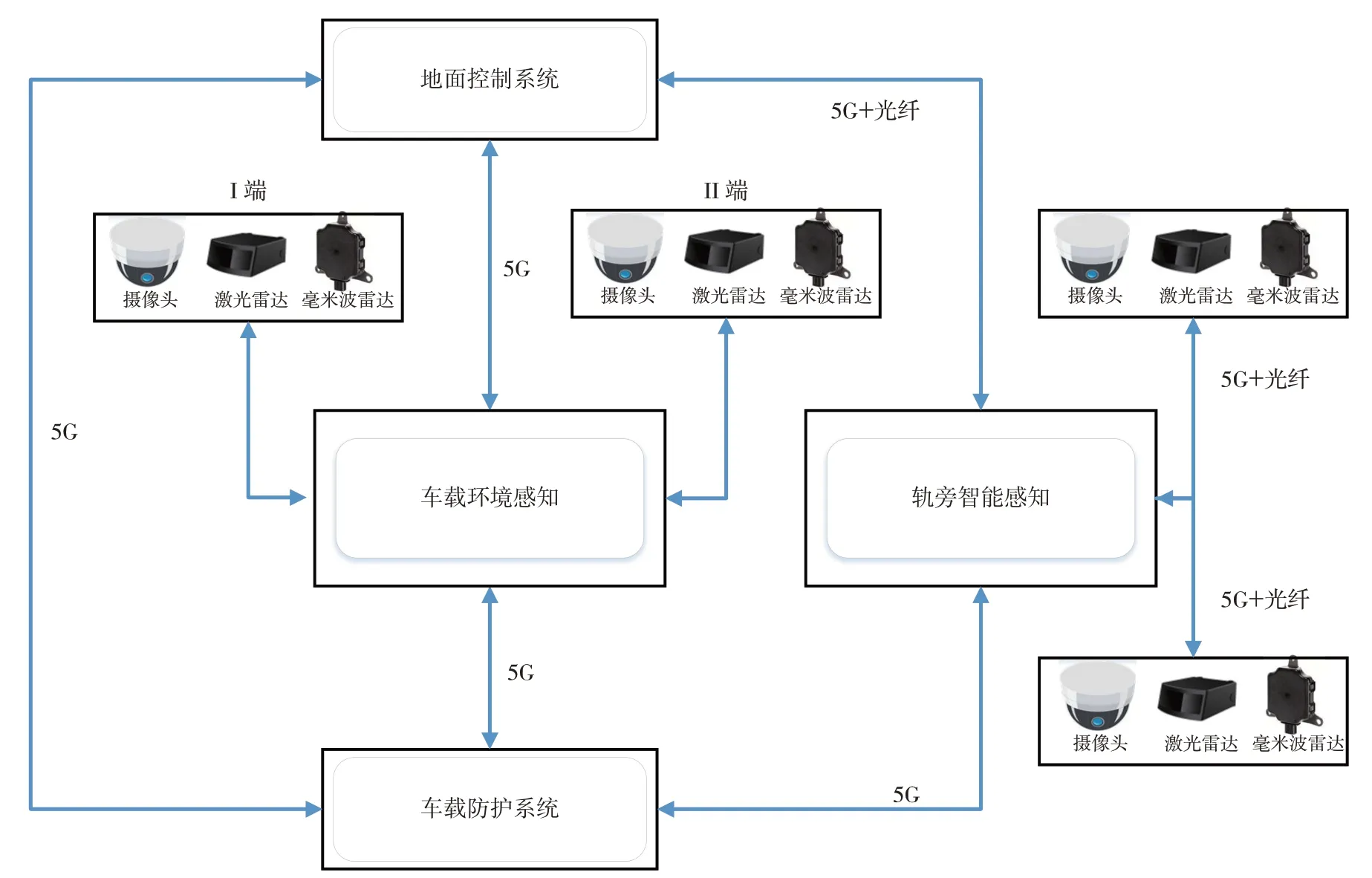
圖3 環境感知結構示意圖
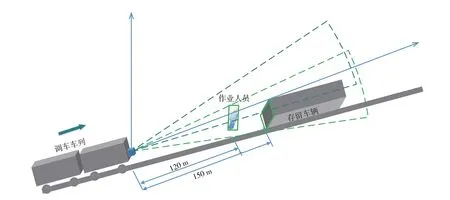
圖4 車列前方環境感知與障礙物測距示意圖
2)精準定位:存車線內停留車輛位置定位和站場內調車作業人員定位技術。通過在作業車列前端加裝便攜測距裝置,實現對車列前方視頻采集、距離探測等。便攜測距裝置利用北斗差分定位、慣性傳感器結合車載里程計實現精準定位,利用激光雷達實現對存車線內停留車輛的距離探測。通過加裝便攜測距裝置,調車作業人員只需在地面跟車前行,無需攀爬車列隨車走行,既降低了調車人員的勞動強度,也避免了作業過程中人員跌落、摔傷等事故發生。作業人員手持終端實時將差分后的北斗導航數據通過5G回傳給地面控制中心,并根據地面控制中心的相應指令提示作業人員。地面控制中心根據作業計劃結合高精度地圖,完成作業人員作業電子圍欄規劃和作業人員實時軌跡追蹤和越界提示。停留車輛定位示意圖見圖5。
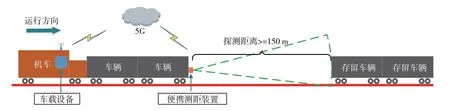
圖5 存車線停留車輛定位示意圖
3)決策規劃:調車作業行車許可自動計算技術。地面控制設備通過站場軌道電路、車載北斗差分定位、慣性傳感器和車載里程計,并結合進路開放條件,實現對作業車列和作業機車的精準定位,作業全程的車列完整性檢查和車列、機車位置追蹤,自動根據車列前方調車信號開放狀態、關鍵作業點(一度停車點、限速道岔、限速區段、站界、盡頭線等)允許通過或接近信息、感知系統反饋的車列前方車輛及人員等障礙物信息,實現調車行車許可融合計算,計算結果通過5G上傳到車載控制設備。
4)控制執行:綜合了調車車列及線路參數計算的機車控制技術和運行曲線計算技術。車載控制設備根據地面控制設備計算的行車許可,并結合行車障礙物識別、車列長度、接風管數量、調車作業通知單中的空/重車、車輛類型等信息,綜合計算機車運行曲線,控制機車牽引電路或制動機進行加速、減速、制動、換向、鳴笛等,以規劃模式到達調車作業目的地。具體功能包括:根據前方防護點類型進行速度曲線計算,基于PID機器改進算法進行機車速度控制、單機連掛速度控制、存車線存留車對標停車控制等。
3 結束語
基于5G通信的調車作業安全防護技術可充分發揮5G技術優點,優化既有STP車地通信邏輯,彌補既有數傳電臺半雙工通信缺點,填補調車作業相關設備采集狀態和智能感知信息與STP聯控的空白,實現了對STP控制技術的整體升級和STP控車效率的明顯提升。系統通過對站場內鐵鞋、脫軌器等設備狀態、車載和軌旁智能感知設備感知信息、車列運行前方視頻圖像和激光雷達點云數據融合等信息的引入,促進了鐵路站場集中區、非集中區和機務段內進行調車作業的專用調車機、本務機和軌道車技防手段升級,為站內作業機車遠程駕駛和自動駕駛奠定了技術基礎,明顯降低了司乘人員、調車人員和指揮人員的勞動強度,也降低了作業過程發生人身傷亡事故的可能性,具有很高的經濟效益和社會效益。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
故事大王(2016年7期)2016-09-22 17:30:08
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57