列控系統車地不匹配性分析與探討
2021-07-08 07:39:04陳建強
鐵道通信信號 2021年6期
關鍵詞:案例
陳建強
自2008年我國第一條具有完全自主知識產權、設計時速300 km的京津城際通車運營以來,截至2020年底,我國高速鐵路運營里程已達3.8萬km。列控系統(CTCS)作為我國高鐵的關鍵核心技術之一,對其相關技術的研究與積累,以進一步提高其技術體系的完備性,對我國高鐵更好地走出國門具有重要意義。
根據系統配置和功能,我國列控系統劃分為CTCS-0~4級[1],目前國內高鐵推廣應用的是CTCS-2級(C2)和CTCS-3級(C3)列控系統。列控系統由地面子系統和車載子系統組成,地面子系統一般由工程設計單位和系統集成商分別負責設計和實施;車載子系統則由車載設備供應商負責設計及制造。為避免因不同的分工導致車地之間出現不匹配,我國鐵路管理部門陸續頒布了如文獻[2]~[9]等行業標準,分別對車載設備設計制造與地面設計實施進行約束。但隨著我國鐵路網密度不斷加大,既有線路與新建線路交織、樞紐日趨復雜、鐵路運用與建設的矛盾以及環境等因素,導致列車運行場景繁復多樣,工程建設過程中不斷出現車地不匹配的案例。
通過對多年來累計出現的列控系統車地不匹配案例進行梳理分析,探討形成原因,并提出改進建議,希望引起相關領域專家重視,進而研制出更完備的具有自主知識產權的列控系統。
1 車地不匹配性案例分析與策略
1.1 分相區在進站口外方
1)案例簡述。如圖1所示,某站SLF進站口外方796 m處有一分相區,列控數據表中對該分相位置進行了描述。實際運用時發現,動車組列車以C2完全監控模式(FS)由下行正向側線5道進站,經轉線發車(X→X5→SF)通過時,在SF信號機后約247 m處,車載輸出過分相指令,控制車載真空斷路器斷開(此處實際并無分相區)。
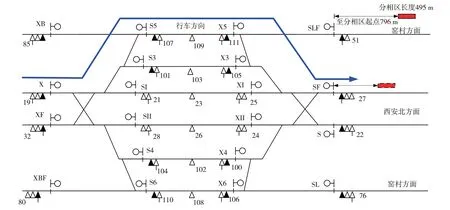
圖1 分相區在進站口外方平面示意圖
2)原因分析。據查X信號機處有源應答器按規范發送了特殊區段信息(ETCS-68包),描述了SLF信號機外方796 m的分相區情況(窯村方向);X5、SF信號機處應答器組報文不包含分相區信息。當車載ATP經過X信號機處應答器時,收到分相區信息,經過X5、SF信號機處應答器時,無新的分相區信息。按照ATP設備處理邏輯,ATP以FS側線運行時,不會丟棄ETCS-68包,直到收到新的ETCS-68包才會更新。因此ATP從X5→SF轉線時,一直保存從X信號機處應答器收到的分相區信息。在列車行至SF信號外方區間247 m時,輸出過分相指令。
3)解決方案。根據車載處理邏輯,當排列X5→SLF直股發車時,出站有源BX5應答器的發車進路報文維持預告SLF外方的分相區;當排列X5→SF或者X5→S發車時,在出站有源BX5應答器的發車進路報文中增加ETCS-68包,表明進站外方無分相,動車在經過此應答器時,更新區間分相區信息。
1.2 站場未開通線路限速
1)案例簡述。如圖2所示,某站由于ⅤG/ⅥG向煙臺方面發車進路暫不開通,因此工務提供5#、7#道岔(42號道岔)的側向速度為30 km/h。列車在ⅤG/ⅥG以部分監控模式(PS)往濰坊方面發車,經過出站應答器組后觸發制動。
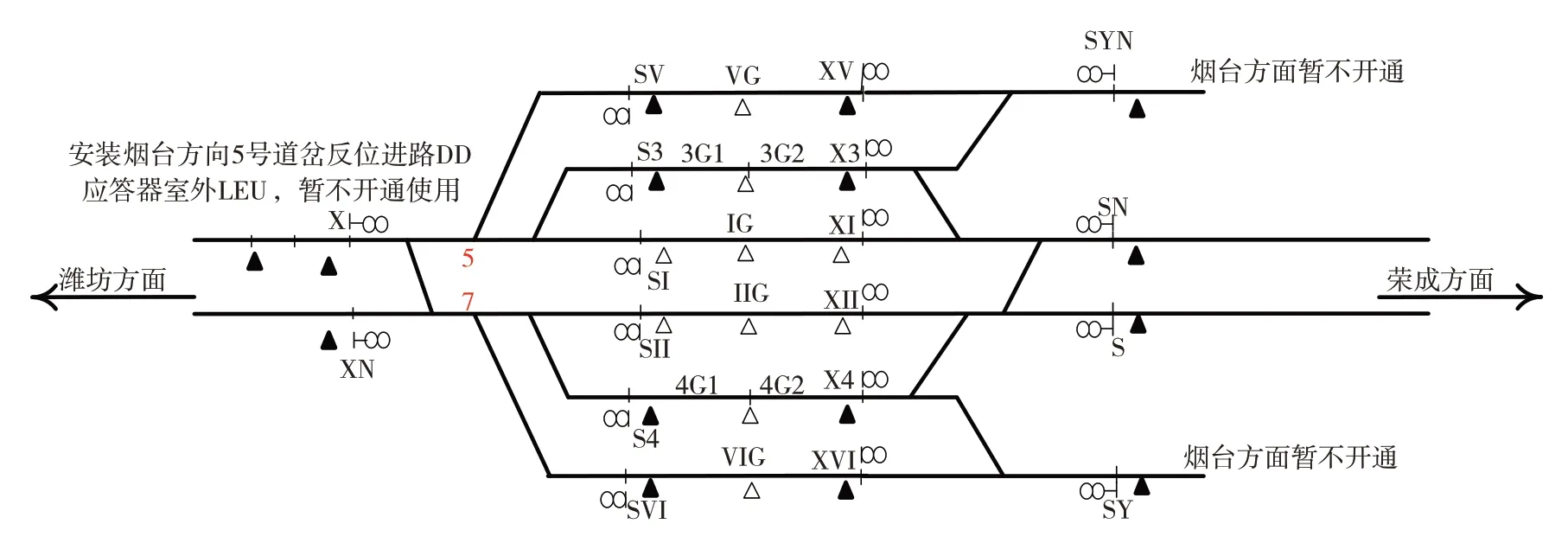
圖2 某站平面示意圖
2)原因分析。PS下車載ATP僅監控列車速度是否超過45 km/h,ATP在經過出站應答器組時,收到有源應答器中E27包描述的線路速度為71 m(應答器安裝距離)后30 km/h,并在出站信號機處轉為FS,此時常用制動速度模式曲線(NBP)由45km/h陡降至30 km/h,如列車在經過出站應答器組時速度已提升到45 km/h,車載此時會判斷當前NBP速度不滿足71 m后降至30 km/h,就會引起制動。
3)解決方案。5#、7#道岔的側向速度在出站應答器組報文中描述為45 km/h,現場由司機根據《站細》人工限速30 km/h側向過岔。
1.3 反向運行時的車載要求及使用限制
1)案例簡述。某站既有反向直向發車進路沒有設置電碼化,車站改造為C2后,進站口有源應答器給出了反向運行報文,但部分型號車載在進入發車進路后產生制動。
2)原因分析。目前全路在用車載設備包括200C、200H、300T、300S和300H型,反向運行時發車進路是否需要載頻、有效碼,各車載設備的處理方式存在差異[10]。正常在車載收到反向運行報文情況下,200C和300T車載不要求地面有低頻或檢測碼(JC),反向發車進路可以不補碼;200H、300S和300H車載則要求地面至少需要有JC,用于輔助判斷軌道電路是否完好,否則將產生制動。
3)解決方案。對反向直向發車進路補發JC碼。
1.4 過絕緣節時車載收碼延時
1)案例簡述。某線原有一處級間轉換點與進站應答器合設,即級間轉換點位于進站信號機絕緣節外方30 m處,200C車載過絕緣節時觸發制動。
2)原因分析。200C車載過絕緣節時,載頻和低頻信息會中斷約1 s,到達級間切換點轉為C2時,尚未收到有效低頻碼,ATP不能計算移動授權,認為冒進而觸發制動。
3)解決方案。將級間轉換應答器組移設至距絕緣節200 m處。
1.5 車載對轉頻碼的處理邏輯
1)案例簡述。某線聯調聯試過程中發現,動車組側向進入股道后,會瞬間觸發B7制動,通過ATP記錄數據分析,應答器描述的無碼區長度小于車載子系統收到有效碼時的實際走行距離,且超過車載子系統允許誤差。
2)原因分析。某線典型車站的載頻布置如圖3所示,站內采用97型25 Hz軌道電路,僅正線及股道發碼。因該線為客貨共線鐵路,為實現未裝備ATP車載子系統的機車上、下行載頻自動切換,故設計了轉頻碼。
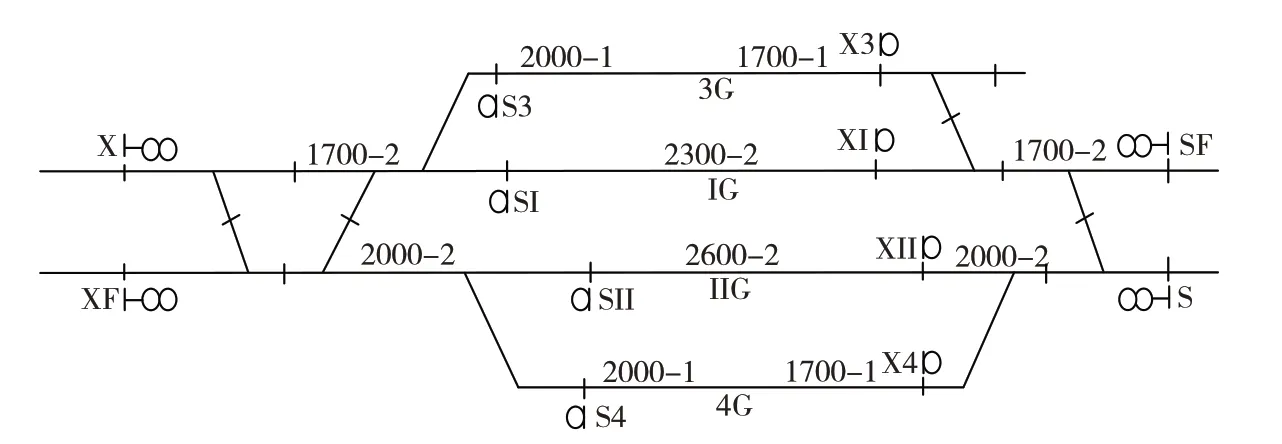
圖3 某線典型車站頻率布置示意圖
根據大量的測試數據分析,絕大部分B7制動均存在有轉頻的進路。某線調試動車組為CRH2、CRH5型,分別裝備200H、200C車載子系統。根據車載設備廠家對低頻信息的處理方式:200H在應答器描述的無碼區范圍(允許50 m誤差)收到并譯出載頻,即認為到了有碼區;200C在應答器描述的無碼區范圍(窗口時間約2.3 s)內收到并譯出有效低頻,才認為到有碼區。由于軌道電路的分路狀況、列控中心反應時間、車載子系統的解碼時間等,都會對動車組進入股道后能否及時收到地面信息帶來影響,如側線股道絕緣節處的銹蝕、轉頻碼本身需占用的時間,都使得車載子系統在譯出有效低頻時,經常超出其系統設備設定的誤差范圍,故出現B7制動現象。
3)解決方案。取消轉頻碼,當未裝備ATP的列車需轉頻時,由司機采用手動轉換開關的方式進行上、下行載頻切換。
1.6 直向始發列車在部分模式下的制動現象
1)案例簡述。裝載200H的動車組以PS在某站XIG經上行線反向發車時,如圖4所示,在SL1前發生瞬間B7制動,相同場景以FS發車,在該位置卻未發生該現象。
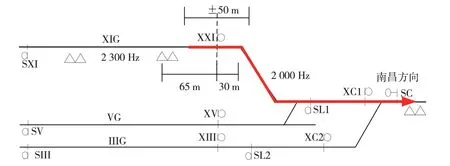
圖4 直向始發場景示意圖
2)原因分析。當200H車載ATP從股道以PS發車時,保持下行載頻鎖定,雖在出站應答器指定65 m處為岔區載頻2 000 Hz的起點,但列車運行65 m后,ATP因考慮測距誤差不會立即鎖定2 000 Hz載頻,此時在岔區內由于地面發送上行載頻,因ATP保持下行鎖定而判定為掉碼,直至(65+30)m處ATP強制鎖定2 000 Hz載頻并開始解碼,但時間已超過4 s,觸發B7制動。若采用FS發車,200H車載ATP提前鎖定2 300 Hz和2 000 Hz載頻,處于位置確定狀態,能夠在過信號后立即接收2 000 Hz載頻并解碼,因而未發生制動現象。
3)解決方案。采用修改地面子系統的特殊處理方案。一是列控中心修改出發信號機處有源應答器BXXI-1的XXI至XC1直向進路報文:①軌道區段信息包(CTCS-1包,反方向有效)中增加1個長度為65 m軌道區段的描述,其中描述起點D_signal=0,該軌道區段載頻為2 300 Hz(與股道載頻一致),其末端信號機類型為7;②線路速度信息包(ETCS-27包,反方向有效)也做相應修改,描述起點為0,其描述范圍與CTCS-1包的描述范圍一致。二是修改BXXI-2無源應答器報文中的線路坡度信息包(ETCS-21包,反方向有效),描述起點改為0,不短于CTCS-1包的描述范圍。
1.7 側停后直進盡頭式存車線制動問題
1)案例簡述。如圖5所示的某動車段內站型,裝載300H的動車組由XF進入AG停車后啟動,直向駛往前方存車庫線,動車組越過XA絕緣節收到HU碼后,制動停車。
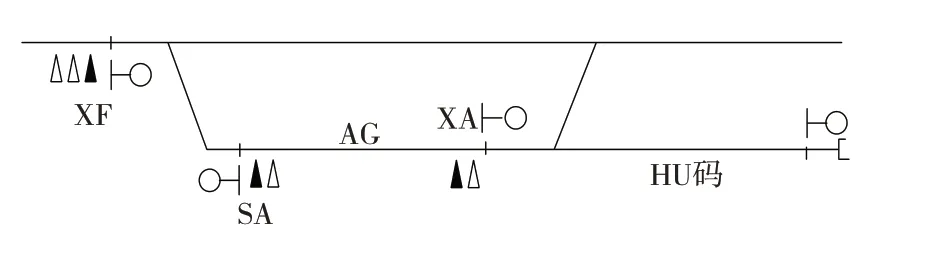
圖5 動車段特殊站型示意圖
2)原因分析。300H由PS轉FS的邏輯為收到地面有效低頻(非HU)碼+應答器中線路和限速信息,越過地面絕緣節后30 m內,仍為有效低頻碼時轉入FS。由于此處為盡頭線路,越過XA絕緣節后地面只能發HU碼,因此該處300H無法按PS運行到前方信號機處。
3)解決方案。取消XA應答器和XA絕緣節后地面的發碼,AG改發UU碼,讓列車以部分監控運行到前方信號機處。
1.8 關于部分車載對進路信號機的特殊處理
1)案例簡述。某站存在進路信號機,聯調聯試期間,因進路信號機應答器報文將信號機類型描述為“進路信號機”,裝載200H的動車組經進路信號機側向接車經過應答器后,出現超速冒進。
2)原因分析。由于200H車載ATP無針對進路信號機的描述類型,當進路信號機對應的應答器報文將信號機類型描述為“進路信號機”時,ATP按區間信號機處理。當排列側向接車進路,且丟失該進路應答器組后,ATP將維持正線接車處理邏輯,僅作報警提示,但會使用正線數據進行控車,導致目標點錯誤而冒進信號機。
3)解決方案。將進路信號機的信號機類型描述為“進站信號機”,排列側向接車進路后,如果丟失該進路應答器組,ATP按照側線接車丟進站應答器處理,觸發最大常用制動,轉為部分監控模式,從而避免冒進信號機。根據已開通項目動車兼容性試驗結論,上述處理方法對目前在用的5種車載ATP均可適用,不會影響其他處理邏輯。
這里需指出,200H、300S和300H因本身缺少“進路信號機”專有描述類型,導致通過地面子系統修改來適應車載子系統,即為了兼容所有車載設備,將地面設備原本正確的描述改為與實際不符,此種做法值得商榷[11]。
2 案例特點歸納總結
列控系統作為安全等級高達SIL4級的“故障-安全”系統,其對安全苛求的實現必須滿足系統所適用的條件。車載安全邏輯有很多,如默認報文處理、無碼處理邏輯、控制模式轉換處理、側線特殊控制邏輯、應答器一致性檢查、車尾保持邏輯以及等級轉換處理等,其總原則是車地協調,在滿足基本功能的同時,實現基于安全的可用性的最大化[12]。歸納以上各個案例的特點,總結梳理見表1。
從表1可以看出,各個案例均采用修改地面子系統的方案解決問題,案例1~7均包含車載安全邏輯;車載安全邏輯在特殊場景下體現為車載特殊處理邏輯,部分案例的車載特殊處理邏輯未納入車載相關規范,甚至部分車載子系統未執行車載相關規范,導致車地不匹配問題難以被提前發現;遇到特殊站型,更易出現車地不匹配問題。
3 車地不匹配性原因探討
綜上所述,造成列控系統車地不匹配的原因主要是車載安全邏輯在實際運用中因場景特殊所致,也有專家認為是工程設計單位對車載設備某些邏輯限制條件了解不夠透徹,未充分考慮列控系統的特殊性造成[13]。
1)列控車載子系統的核心關鍵技術是安全計算機平臺。在發展初期,由于安全計算機平臺的軟、硬件受國外技術約束,當現場出現問題時往往難以及時修正,特別是涉及平臺軟件底層時,問題修正只能依賴外方或作為遺留問題[12],現場只能通過修改地面子系統進行適應,最終使全路各種特殊地段的地面子系統成了特殊設計,造成表1中案例的解決均是通過修改地面設備。

表1 車地不匹配案例分析表
2)雖然目前車載子系統已突破國外技術瓶頸,具備了自我修正的能力,但優化修改車載軟件必須同時修改地面子系統的特殊設計。面對多年歷史積累遺留的特殊場景,進行全面統一的修正,代價太高,因而在一段時間內需維持原來的車載子系統邏輯,制約了軟件修改的可行性;同時車地不匹配問題往往在聯調聯試期間,或者開通運營之后才被發現,此時若對車載子系統進行修改,就面臨鐵路運用與建設的工期矛盾問題,也造成修改車載軟件難以實施。
3)伴隨著列控系統復雜程度的相應增加,加大了車地子系統的設計難度,也給列控系統車地不匹配問題的出現提供了可能。
4)在我國,列控車、地子系統分別由不同單位分工設計,缺少直接交流;雖然有相應的技術規范,但因設計者往往只關注本領域的規范內容,對其他規范理解的深度和廣度不足,難以做到統籌考慮。
5)我國列控系統相關技術規范本身具有一定的局限性。以車載子系統為例,各車載設備供應商提供的系統架構模型、處理邏輯等均存在極大差異,難以做到完全統一要求,即技術條件規定無法完全涵蓋車載設備本身的特殊處理邏輯,即使地面子系統設計同時完全執行車、地技術規范,也無法完全避免車地不匹配問題的出現。
綜上,因歷史原因導致的車載子系統軟件的特殊處理邏輯將長期存在,因此通過修改地面設備條件,以適應車載軟件特殊處理邏輯的情況,也將在我國長期存在。
4 相關建議
1)具備車地子系統底層軟件的自主修改能力是實現車地協調匹配的前提條件。目前我國的安全計算機平臺已基本滿足運用需求和自主知識產權要求[12],但各設備廠商仍需進一步加強科研攻關,實現對車地子系統底層軟件的全面掌握,擁有列控系統完全自主知識產權。
2)加強不同車載子系統廠家與地面子系統廠家之間的交流。建議國鐵集團定期舉辦列控系統車載、地面設計者和鐵路工程設計者交流會,通過彼此深入探討碰撞,雖求同存異,但期統籌融合。
3)建議在路內提倡具有豐富經驗的工程設計者投身從事列控車載子系統的科研開發,同時具有豐富列控車載子系統研究經驗的科研人員,在設計院定期開展工程設計工作,通過雙方人員的融合交流,探索開發出更加完備的列控系統。
4)建議在全路范圍內對列控系統存在的車地不匹配現狀進行深入詳盡的調查,形成完整的調查報告,并委托工程設計單位進行車地不匹配性整改的可行性研究,形成整改方案、投資等成果文件,上報國鐵集團決策,擇機進行整治。
5 結語
通過對多年來工程建設中出現的列控系統車地不匹配案例進行分析,進一步探討列控系統車地不匹配問題的原因,并提出建議措施。目前很多案例的解決方案側重于對實際運營干擾小、付出代價低,缺少站在系統架構的高度進行深謀遠慮的思考,因此需要在問題發生前期,提早進行系統分析歸類,從源頭、系統層面去克服車地不匹配問題,真正構建完備的列控系統,為我國具有自主知識產權的列控系統技術走出國門,奠定更為堅實的基礎。
猜你喜歡
幼兒100(2023年36期)2023-10-23 11:41:48
家庭影院技術(2021年2期)2021-03-29 07:18:58
家庭影院技術(2021年2期)2021-03-29 07:18:56
少先隊活動(2021年2期)2021-03-29 05:40:48
家庭影院技術(2021年1期)2021-03-19 05:14:56
家庭影院技術(2020年8期)2020-09-11 06:45:20
家庭影院技術(2020年8期)2020-09-11 06:45:18
中學生數理化(高中版.高二數學)(2019年6期)2019-06-24 03:37:50
中國公路(2017年7期)2017-07-24 13:56:38
中學生數理化(高中版.高二數學)(2016年4期)2016-03-01 03:46:18