基于RFID技術的低地板有軌電車位置檢測系統(tǒng)設計
2021-07-08 07:39:08李生軍
鐵道通信信號 2021年6期
李生軍
伴隨著城市軌道交通的快速發(fā)展,低地板有軌電車在城市軌道交通中日益普及,有軌電車以其站間距短、發(fā)車頻次高、乘坐便捷等優(yōu)勢成為了市民出行常選的公共交通工具。有軌電車線路與城市道路之間大都存在交叉路口、部分線路存在天橋等特殊路段,這些路段往往不架設接觸網供電線路,而對于單純用接觸網供電的有軌電車是無法通過這種無網無電區(qū)路段的。因而一種新型的混合供電制式列車應運而生,即列車采用接觸網和超級電容雙供電模式,在線路有電區(qū)列車升弓后采用接觸網供電,在線路無電區(qū)列車降弓后采用超級電容供電。為提高有軌電車的運行效率和安全,提升列車的智能化水平,本文開發(fā)了一套位置檢測系統(tǒng)來控制列車實現(xiàn)供電模式的自動切換、受電弓的自動升降等功能,從而保證列車安全、高效的運營。
1 位置檢測系統(tǒng)組成及原理
有軌電車的車輛定位方式主要有2種:一是衛(wèi)星系統(tǒng)定位技術,其信號易受到遮擋、反射、折射、多路徑等因素影響,導致可用性受限[1];二是軌旁定位技術,包括信標定位、軌道檢測環(huán)線定位、裂縫波導定位等[2]。列車位置檢測系統(tǒng)采用信標定位方式,應用射頻識別(Radio Frequency Iden?tification,RFID)[3]技術對地面信標進行檢測,通過無線射頻信號準確、快速地獲取信標的數(shù)據信息[4?5],從而根據信標的位置對有軌電車的位置進行精確定位,進而實現(xiàn)具體的控制功能。
1.1 系統(tǒng)組成
位置檢測系統(tǒng)是以信號接收、傳輸、控制為核心的自動控制系統(tǒng),能夠對有軌電車在線路特定位置處的列車地理位置進行精確定位[6]。該系統(tǒng)設備分為車載設備、地面設備和編碼設備三部分:車載設備包括可編程控制器PLC、RFID閱讀器(集成了天線內置模塊);地面設備為無源信標;編碼設備為手持式讀寫器。以5模塊編組的有軌電車為例,位置檢測系統(tǒng)的組成及設備分布示意見圖1。
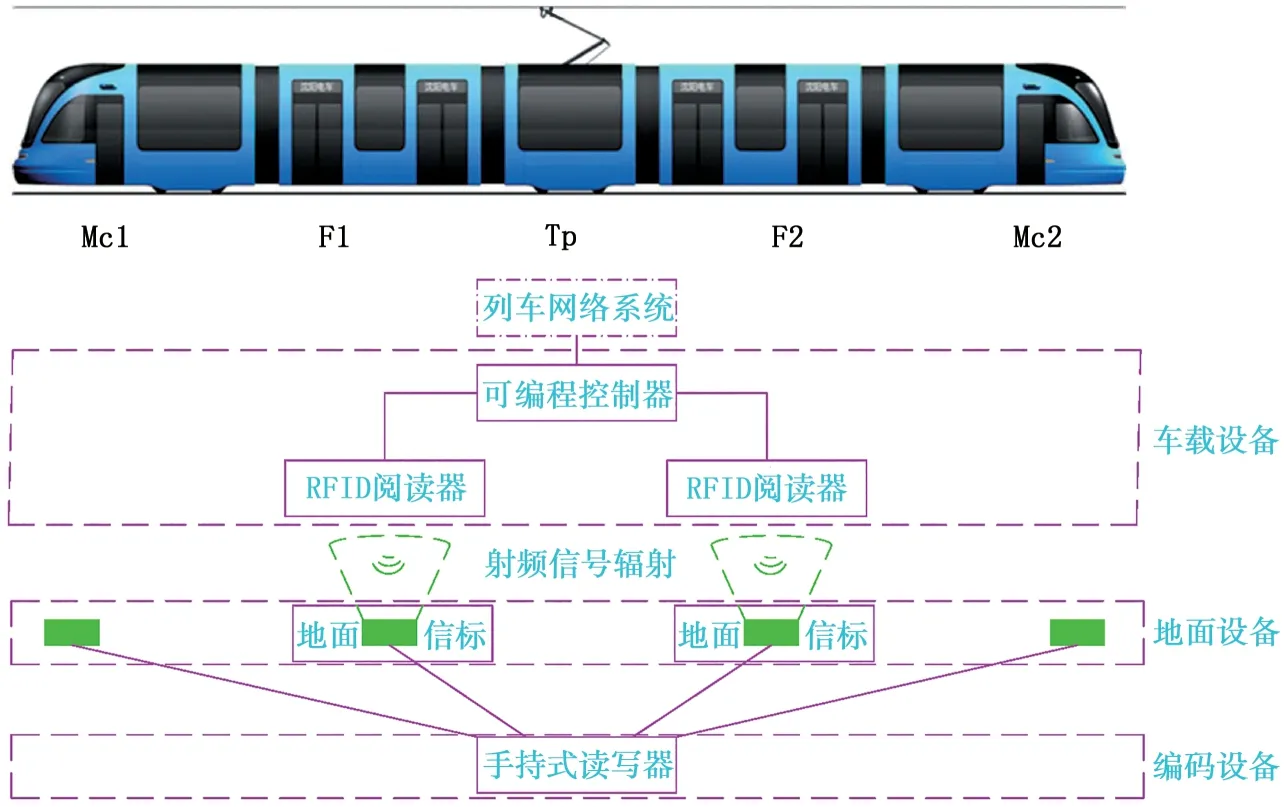
圖1 位置檢測系統(tǒng)的組成及設備分布示意圖
在Tp車的車內設置可編程控制器PLC,可采用以太網或RS-485串口通信以及硬線I/O與列車網絡系統(tǒng)進行通信;在F1/F2車的車底合適位置對稱安裝2臺閱讀器,閱讀器與可編程控制器之間通過RS-485以及硬線IO進行通信;在線路特定位置布設地面信標,信標的數(shù)量和布設位置根據閱讀器的安裝位置以及需要控制的具體功能等因素來確定。
1.2 工作原理
該系統(tǒng)利用軌旁信標進行位置定位,將無源信標按照設計需求布置在線路軌道路面下,通過手持式讀寫器給每個信標編寫ID碼;列車車體的底部安裝RFID閱讀器,列車經過信標路段時,由RFID閱讀器的天線發(fā)射特定頻率的無線射頻信號來激活信標,信標通過內置天線將內存中的ID數(shù)據調制信號發(fā)射到RFID閱讀器的接收天線,經閱讀器解調和解碼后,實現(xiàn)車載RFID閱讀器和地面信標的數(shù)據信息交互[7];車載可編程控制器PLC與RFID閱讀器建立數(shù)據通信后,調用閱讀器中的數(shù)據信息與軟件數(shù)據庫中存儲的信息進行比對,根據信標的唯一ID碼識別出列車此時的精確地理位置,可編程控制器經內部控制邏輯處理后輸出控制信號進行列車相關功能的控制。
1.2.1 可編程控制器
根據系統(tǒng)控制功能電氣接口及通信接口要求,可編程控制器選用西門子的S7-1200 PLC。該PLC集成了14個數(shù)字量輸入、10個數(shù)字量輸出接口及2個PROFINET通信接口。PROFINET接口可用于PLC的調試端口,也可用作與其他設備之間的以太網通信接口;該接口具有自動交叉網線的RJ45連接器接口,提供100 Mb/s的數(shù)據傳輸速率,支持TCP/IP通信協(xié)議,PLC供電電壓為DC24 V[8]。為適應閱讀器的RS-485通信需求,配置了2個RS-485通信模塊來實現(xiàn)PLC與2個閱讀器之間的點到點高速串行通信。
1.2.2 RFID閱讀器
RFID閱讀器采用無線射頻讀寫器,內部集成了射頻單元(發(fā)送和接收模塊)、控制模塊和天線單元,具有數(shù)據通信接口(RS-485/RS-232,可配置以太網接口)和I/O數(shù)字量輸入輸出接口,供電電壓為DC24 V。
閱讀器通過內置天線單元實現(xiàn)能量的傳遞和數(shù)據的交互,以無機械接觸的方式通過發(fā)射射頻信號獲取信標數(shù)據[9]。閱讀器工作時自動發(fā)送125 kHz的發(fā)射信號,信標接收此激活信號后,將存儲在芯片中的數(shù)據信息通過6.78 MHz的頻率發(fā)射給閱讀器,由閱讀器進行報文處理后存儲在內部只讀存儲器(EEPROM)中,再通過PLC發(fā)出的信標讀取指令將信標信息傳送給可編程控制器進行相關邏輯功能控制。
閱讀器對外電氣接口采用的連接器具備IP67高防護等級,防護性能好,能夠適應列車底部的安裝環(huán)境。
1.2.3 RFID信標
RFID信標是安裝在軌道線路沿線用來反映絕對位置的物理標志[10]。信標安裝在軌道路面下,信標安裝后沿軌道的縱向中心線與閱讀器安裝后沿車體的縱向中心線相對重疊,信標安裝后的上表面與閱讀器安裝后的下表面之間的相對垂直距離在100~800 mm之間,以便于在閱讀器發(fā)射的磁場范圍內可靠地讀取到信標信息。
當列車閱讀器經過信標上方時,閱讀器發(fā)射的125 kHz射頻信號激活信標工作,信標將存儲的ID編碼信息以無線射頻信號傳遞給閱讀器,為列車提供絕對地理位置信息。信標信息包含具體的公里標、序列號等內容,可根據需要存儲的數(shù)據要求通過手持式讀寫器對信標進行編碼。無源信標采用全密封結構,外殼堅固,內裝芯片(具有多個字節(jié)存儲容量),具有IP67高防護等級,能夠適應地面潮濕環(huán)境。
在實際應用中,為避免路面長期積水損壞信標,便于現(xiàn)場施工作業(yè)及維護更換,可將信標安裝在預制的非金屬保護盒內后再安裝于線路硬化路面或綠化帶上。為避免金屬環(huán)境對磁場的干擾和信號的衰減,信標需要安裝在無金屬環(huán)境的基坑內,并保證在信標周圍一定距離范圍內無金屬環(huán)境,距離信標前、后方向D>100 mm,距離信標底部方向H>100 mm,信標頂部至地面方向h的距離范圍應為無金屬環(huán)境。信標周圍無金屬環(huán)境安裝要求示意見圖2。
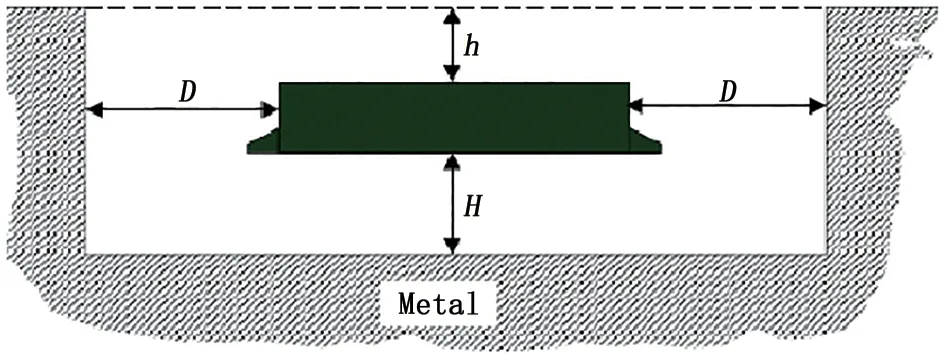
圖2 信標周圍無金屬環(huán)境安裝要求示意圖
1.2.4 手持式讀寫器
手持式讀寫器作為信標編碼和線路信標檢查維護的便攜式讀寫設備,在信標安裝完成后用來給線路上的每個信標進行唯一編碼;自帶液晶顯示屏和操作鍵盤,由電池供電,其感應范圍小,與信標之間的感應距離一般為幾厘米到10幾厘米;通過其內置天線為信標供電并與信標進行無線感應通信,從而將編程代碼字節(jié)信息寫入到信標的芯片存儲器中或讀出信標存儲器中的ID碼,以十進制或十六進制格式在液晶顯示屏上顯示。
2 信標布置及控制功能
信標在線路上的布設位置及數(shù)量是以實現(xiàn)具體的控制功能為前提進行設計的,本文以北京亦莊T 1線有軌電車位置檢測系統(tǒng)的應用情景為例進行介紹。線路存在多個有網無電區(qū)和無網無電區(qū),列車在有網有電區(qū)內行駛時通過接觸網供電,從有網有電區(qū)進入有網無電區(qū)前需切換到車載電容供電,列車在進入無網無電區(qū)前需完成降弓,列車從無網無電區(qū)進入有網無電區(qū)后需完成升弓,列車從有網無電區(qū)進入有網有電區(qū)后需切換為接觸網供電。基于此控制功能需求,利用位置檢測系統(tǒng)來實現(xiàn)車輛供電模式的自動切換和受電弓的自動升降。當車輛經過信標路段時,由閱讀器讀取地面信標信息后,傳輸給PLC進行數(shù)據解析和功能邏輯處理,然后輸出DO信號來控制車輛電路的繼電器得電或失電,從而實現(xiàn)具體的電氣控制功能。以其中一個區(qū)段為例進行地面信標布設,見圖3。此區(qū)段布設5個信標T 1~T 5,第1個信標用來判斷列車行駛的線路方向(上行線或下行線,功能1),第2個信標用來觸發(fā)車載電容供電(功能2),第3個信標用來觸發(fā)降弓(功能3),第4個信標用來觸發(fā)升弓(功能4),第5個信標用來觸發(fā)接觸網供電(功能5)。當列車經過第1個信標時車輛控制電路自動閉合繼電器K1、斷開繼電器K5,通過繼電器K1的常開觸點來控制功能1的實現(xiàn);當列車經過第2個信標時車輛控制電路自動閉合繼電器K2、斷開繼電器K1,從而控制功能2的實現(xiàn)。依次類推,列車經過第N個信標時閉合KN繼電器、斷開KN-1繼電器,從而控制功能N實現(xiàn)。信標布置的相對距離是結合列車在此區(qū)間段的最大運行速度、信標采集傳輸時間、各功能的執(zhí)行時間、閱讀器的安裝位置、受電弓的位置、車輛長度等因素綜合計算后得出的。布設的原則是保證位置檢測系統(tǒng)在檢測到信標后列車有足夠的距離和時間來執(zhí)行對應的控制功能,確保行車安全。
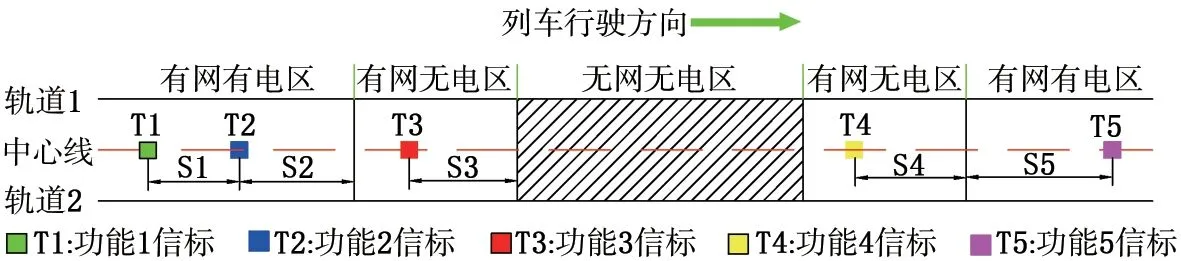
圖3 信標的布置方案示意圖
3 系統(tǒng)控制軟件設計
位置檢測系統(tǒng)的控制軟件設計是通過TIA軟件對PLC進行硬件組態(tài)后,按照控制功能需求進行PLC程序編程,通過閱讀器的上位機配置軟件對閱讀器進行通信接口參數(shù)設置。閱讀器的所有參數(shù)都存儲在非易失型EEPROM存儲器中,可編程控制器PLC與閱讀器RFID之間通過RS-485進行串口通信,支持多種波特率選擇。PLC和閱讀器的RS-485接口參數(shù)均配置為19 200 bps、偶校驗、8位數(shù)據位+1位停止位。通過PLC對閱讀器進行指令問詢,閱讀器返回應答數(shù)據,數(shù)據以十六進制格式發(fā)送和接收。
基于上述信標布置及控制功能需求,位置檢測系統(tǒng)軟件控制流程見圖4。
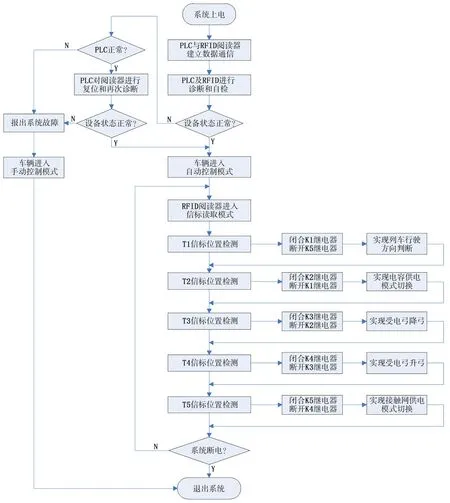
圖4 位置檢測系統(tǒng)軟件控制流程圖
3.1 設備正常模式下的控制
系統(tǒng)上電后PLC與RFID閱讀器建立數(shù)據通信,PLC和閱讀器進行自診斷,設備正常后列車司機臺上的位置檢測系統(tǒng)狀態(tài)指示燈亮,司機將位置檢測控制模式開關打到自動位,車輛進入自動控制模式,PLC自動發(fā)送信標讀取指令使得閱讀器進入信標讀取模式。列車行駛中當檢測到信標時,由RFID閱讀器采集信標存儲的編碼信息并解碼后,將數(shù)據傳送給PLC,PLC經過內部數(shù)據處理和功能邏輯判斷后輸出相關指令信號,控制繼電器來實現(xiàn)車輛相關功能控制。完成此區(qū)間路段的自動控制功能后列車繼續(xù)前行,在線路下一個特定位置區(qū)間內繼續(xù)重復信標檢測控制功能,直至設備斷電或手動控制模式激活時,位置檢測系統(tǒng)退出。
3.2 設備異常模式下的控制
系統(tǒng)上電后PLC與RFID閱讀器建立數(shù)據通信,PLC和閱讀器進行自診斷,當PLC發(fā)生故障時位置檢測系統(tǒng)退出;如果閱讀器設備自檢出現(xiàn)故障,PLC將發(fā)送復位代碼指令給閱讀器進行復位,復位后PLC發(fā)送診斷指令給閱讀器對其進行診斷,如果系統(tǒng)設備正常則進入正常控制模式,如果系統(tǒng)設備依舊故障,系統(tǒng)根據故障來源將相應的故障代碼信號報告給列車網絡系統(tǒng),位置檢測系統(tǒng)退出,同時司機臺上的位置檢測狀態(tài)指示燈保持熄滅狀態(tài),此時司機需將位置檢測控制模式開關打到手動位,在列車行駛至有網無電區(qū)前司機停車后,通過操作司機臺上的供電模式切換開關打到電容模式位切換到電容模式供電,再按下降弓按鈕進行降弓,車輛駛離無電區(qū)后司機通過升弓按鈕進行升弓并將供電模式開關打到接觸網模式位繼續(xù)行駛。手動控制模式會大大降低列車運行的效率,因而僅作為位置檢測系統(tǒng)故障模式下的應急處理方案。
為實現(xiàn)上述案例流程圖控制功能,對可編程控制器PLC的軟件程序進行模塊化設計,包括主程序、中斷程序、通信程序、故障診斷程序、指令控制程序、信息采集處理程序、數(shù)據校驗程序、控制邏輯輸出程序、數(shù)據記錄程序等。通過數(shù)據記錄程序,可將讀到的信標、通信數(shù)據、控制信息等數(shù)據以.csv格式存儲在PLC的WEB界面下,便于查詢和分析。
4 結語
位置檢測系統(tǒng)通過RFID技術對列車進行準確定位,實現(xiàn)了低地板有軌電車供電模式的自動切換控制、受電弓自動控制等功能,也可用于列車位置檢測的其他輔助控制功能。該系統(tǒng)已在北京亦莊T 1線有軌電車上裝車應用,通過在運營線路上的試驗驗證,位置檢測系統(tǒng)的控制功能能夠滿足車輛定位控制需求,數(shù)據記錄顯示列車在不同速度下(0~70 km/h),信標的讀取率均可達到100%。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業(yè)設計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
海峽科技與產業(yè)(2016年3期)2016-05-17 04:32:12