一種多擾流片裝置的推力矢量特性數值研究 ①
2021-07-15 01:46:48李修明陳振陽林天一李曉夢
固體火箭技術 2021年3期
童 悅,鄭 慶,李修明,陳振陽,林天一,李曉夢
(上海航天動力技術研究所,上海 201109)
0 引言
擾流片推力矢量控制技術具有結構簡單、響應快、操縱力矩小等優點,廣泛用于小彈徑潛射導彈,如美國潛射型戰斧導彈,俄羅斯克拉布導彈。隨著反潛技術的發展,增加潛射導彈發射深度已成為提高潛射導彈、潛艇生存能力的有效措施之一。但大深度水下發射時,因水下環境的復雜性與隨機性,需采用主動控制方式增強導彈的穩定性,滿足出水彈道的要求[1]。
國外對擾流片推力矢量控制的研究較早,取得了一系列研究結果。文獻[2]詳細介紹了“戰斧”導彈助推發動機的擾流片推力矢量系統,多項點火試驗測試結果表明擾流片推力矢量技術在水下、艦載及陸基發射下均能正常工作,且水下的矢量效率高于地面。此外,文獻[3-5]重點討論了擾流片對超音速射流的影響,并使用試驗及仿真手段,研究了擾流片形式及分布參數的影響。
國內各高校與科研單位在擾流片推力矢量技術領域也開展了較多的設計、分析和實驗研究工作。例如,南京理工大學數值研究了擾流片結構形狀與噴管內型面幾何參數對流場的影響,并搭建推力矢量控制系統,完成了單擾流片熱試驗與伺服機構動態響應研究[6-8];哈爾濱工業大學采用多相流仿真手段對比了相同背壓下空氣與水環境的擾流片流動結構,討論了安裝間隙、水深、面阻塞率對水下擾流片矢量特性的影響[9];上海機電工程研究所設計了一種不受彈體滾轉干擾的擾流片控制方式,但未考慮水下復雜干擾的影響[10]。上述研究主要集中在擾流片固有矢量特性上,獲得了一定有價值的結果,但未解決擾流片矢量裝置無法提供滾轉力矩的問題。擾流片裝置在實際工程應用中仍需配合導彈副翼等其它姿控裝置來實現彈體姿態控制。
針對擾流片推力矢量方案無滾轉控制力矩的問題,提出了一種適用于多通道控制的多擾流片矢量裝置,并對噴管內流場開展了三維流動仿真研究,分析了其俯偏和滾轉矢量特性。
1 矢量裝置方案
固體火箭發動機噴管出口截面設置有8片擾流片,由相應的電機轉軸控制。對稱布置的2個擾流片為一組,其電機轉向相反,如圖1中擾流片1所示。多擾流片推力矢量裝置工作原理為:當彈體需要俯仰/偏航單通道控制力時,控制相應的一組擾流片向噴管內轉動,側向力的大小可通過調節轉角實現;當彈體需要滾轉控制力矩時,由2片對角分布的擾流片提供,如擾流片1a與擾流片3b、擾流片1b與擾流片3a。本方案的優點在于僅使用噴管出口布置的擾流片就可實現彈體俯仰/偏航以及滾轉多通道控制。
圖1 多擾流片矢量裝置方案示意圖
2 模型簡化
文中選擇擴張半角為18°,喉徑為Dt,擴張比ε=5的錐形噴管作為研究對象。分析表明,擾流片阻塞面積與側向力成正比[7]。因此,文中設計的擾流片阻塞面積A與電機轉角α成線性變化,如圖2所示,以降低矢量控制系統的非線性度,提高控制效率。
圖2 單個擾流片轉角與阻塞面積關系曲線
為便于研究擾流片對矢量特性的研究,將物理模型進行簡化:(1)彈體俯仰/偏航或滾轉時僅由一對擾流片控制;(2)不考慮燃氣對喉徑、擴張段及擾流片等內型面燒蝕的影響;(3)不考慮擾流片與噴管安裝間隙的影響。
簡化后的模型(滾轉控制狀態)如圖3所示,De為噴管出口直徑。
圖3 簡化后模型示意圖
3 數值方法
文中使用Fluent軟件進行數值模擬,采用有限體積法對雷諾平均三維Navier-Stokes(N-S)方程進行離散,無粘對流通量采用基于MUSCL差值的Roe格式進行裂解,而時間推進采用了隱式格式,湍流粘性的計算選用Spalart-Allmaras(S-A)模型,流動方程組以及湍流模型方程組均采用二階迎風格式進行離散。
選取噴管、擾流片及噴管外直徑為55Dt,長80Dt的外部流場作為計算域,同時進行網格劃分,見圖4。整個計算域采用六面體網格單元進行填充,并且在噴管近壁面、擴張段和擾流片等型面變化劇烈的區域進行網格加密。網格單元總數約為370萬,大部分近壁面網格單元的y+保持在20左右。
圖4 計算域及擾流片壁面處網格
仿真中各邊界條件給定如下:噴管入口設置為壓力入口邊界。計算參數為:燃燒室壓強pc=13.5 MPa,燃氣溫度Tc=2750 K,燃氣摩爾質量M=25.28 kg/kmol;計算域前、后方給定為壓力遠場邊界,其靜壓p0=101 324 Pa,靜溫T=300 K;其他邊界均為絕熱固壁邊界。計算過程中,對燃氣作如下假設:燃氣為純氣相且在噴管中的流動為凍結流,不考慮熱輻射、內壁面燒蝕等影響。
文中使用面阻塞率KA,定義為擾流片阻塞的出口面積與噴管出口初始面積之比,對擾流片位置狀態進行描述。同時,采用無矢量控制系統時發動機理論軸向推力F對軸向推力Fz與側向力Fc進行無量綱化,滾轉力矩Mz采用發動機理論軸向推力F與噴管喉徑Dt的乘積進行無量綱化。
4 算例驗證
采用上述數值方法,首先對帶單凸圓弧形擾流片的噴管內外流場進行了仿真研究,并將仿真結果與實驗數據相對照,以校驗仿真手段的準確性。單擾流片發動機實驗裝置見圖5,擾流片采用鎢滲銅難熔合金材料加工而成,固定于噴管出口端面,面阻塞率KA=14.27%。發動機推進劑為低鋁清潔推進劑,工作時間為5 s。實驗時發動機立于KISTLER多分力測力板上,測量其軸向力與側向力,同時使用高速攝影儀記錄發動機工作過程中噴管羽流狀態。
圖5 單擾流片發動機實驗裝置
圖6給出了實驗噴管羽流與仿真結果對比情況,表明該仿真方法可較好地模擬噴管出口擾流片處羽流激波與膨脹波等復雜流動現象,與實驗結果相吻合。此外,表1給出了仿真和實驗獲得的軸向推力、側向力與矢量角,數據表明,仿真值與實驗值吻合良好,側向力Fc誤差在6%以內,軸向推力Fz誤差稍大,但在8%以內。導致軸向推力誤差的原因可能是實驗中喉徑燒蝕引起軸向推力下降。因此,本文所采用的數值模擬方法具有較高的可信度,可作為擾流片矢量裝置進一步研究的工具。
圖6 實驗噴管羽流與仿真結果對比
表1 仿真、實驗獲得的推力矢量參數對比
5 計算結果及分析
5.1 俯仰/偏航矢量特性研究
按上述仿真方法,對控制彈體俯仰/偏航力矩的一對相鄰的擾流片開展數值計算。圖7為擾流片面阻塞率KA=8.84%時噴管內流場對稱面馬赫數分布云圖,可以看出,燃氣沿軸線馬赫數不斷增大,噴管擴張段為超音速流動;對稱面截面雖無擾流片堵塞,但擴張段下壁面出現旋渦,二維流線呈“流體源”狀;擴張段主流區燃氣經過斜激波后,流向發生偏轉。圖8較清晰地展示出了噴管內擾流片區域處燃氣三維流線:燃氣沿流向流動,受擾流片堵塞影響,在擾流片前部出現旋流,形成高壓強低速旋流,燃氣向雙擾流片兩側排出;同時,因擾流片需轉動,雙擾流片中有一定縫隙,旋流內的高壓低速燃氣流在對稱面處相互堆積后經縫隙處排出。
圖7 對稱面馬赫數分布云圖
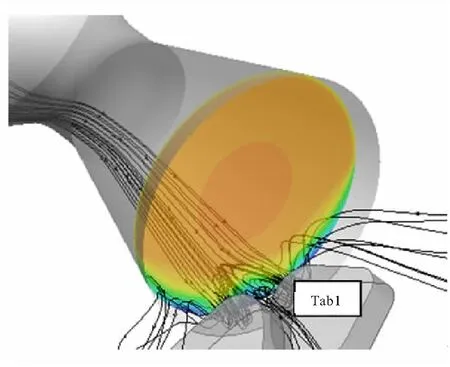
圖8 噴管內流道三維流線
進一步對比了不同面阻塞率下多擾流片裝置的俯偏矢量特性,見圖9。明顯看出,雙擾流片俯偏矢量規律與單擾流片特性一致:噴管軸向推力與擾流片面阻塞率成反比,隨著擾流片面阻塞率的增大,噴管軸向推力由0.941降至0.846;噴管側向力與擾流片面阻塞率成正比,研究范圍內側向力最大為0.147,噴管矢量角達9.88°。圖9還對比給出了俯偏控制與滾轉控制下裝置軸向推力曲線。可見,俯偏狀態下相鄰兩擾流片內部流場更為復雜,旋流區相互干擾劇烈。因此,流動損失大,軸向推力小。
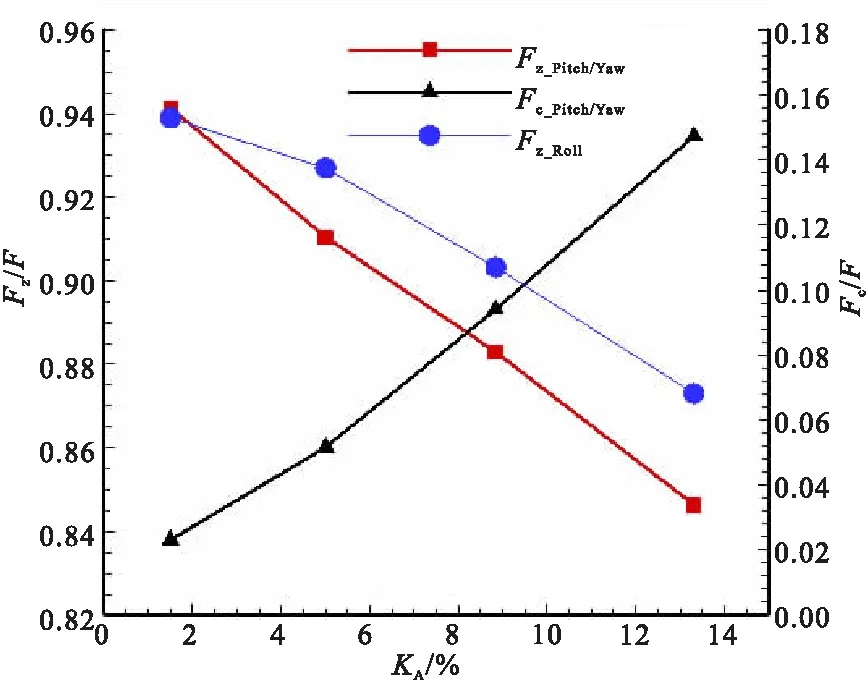
圖9 矢量特性曲線
此外為研究噴管側向力影響因素,分別對擴張段壁面、擾流片壁面壓強積分計算側向力,結果見圖10所示。擴張段獲得的側向力Fc_cone隨擾流片面阻塞率增大而增大,但擾流片上側向力Fc_tab基本不隨面阻塞率變化。由此可知,隨著面阻塞率增大,噴管擴張段獲得的側向力逐漸占主導,增加擾流片軸向厚度對控制系統的最大側向控制力無增益。
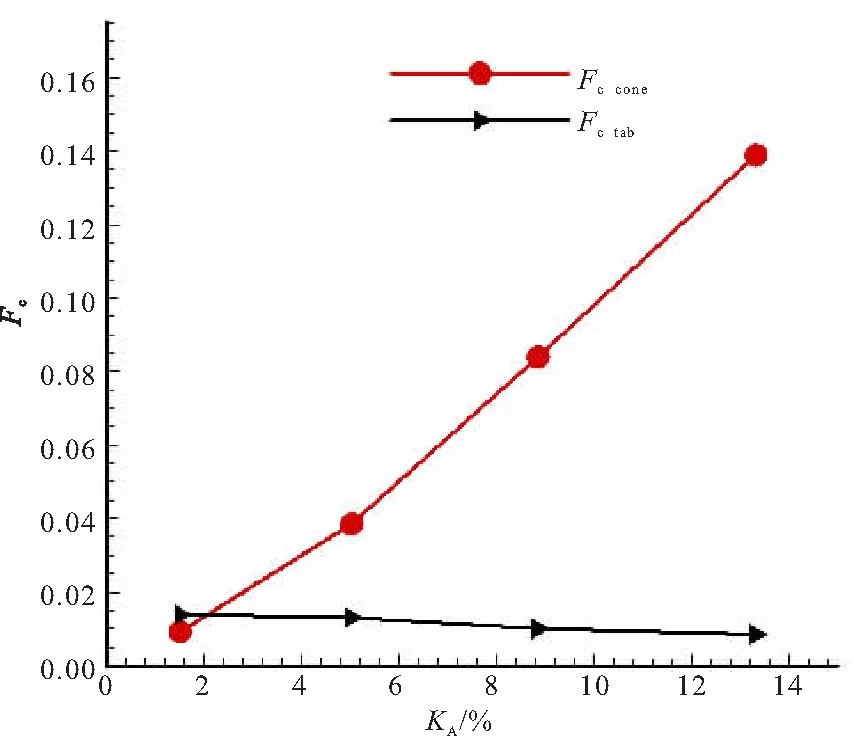
圖10 擴張段與擾流片獲得的側向力對比
5.2 滾轉矢量特性研究
為研究多擾流片裝置的滾轉特性,對圖11所示控制彈體滾轉力矩的一對擾流片開展數值計算,同時仿真分析了擾流片預制偏角β對滾轉力矩的影響規律。
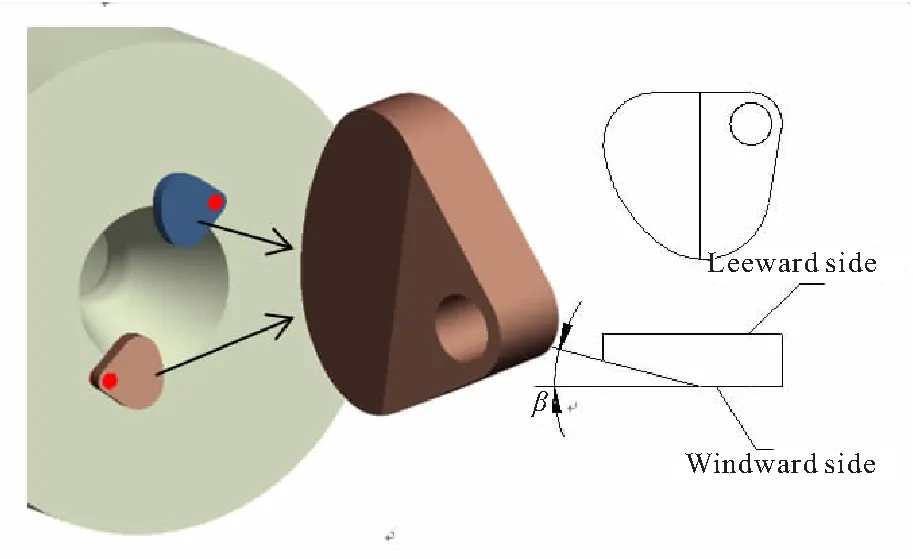
圖11 帶預制偏角的擾流片
圖12為擾流片面阻塞率KA=8.84%,擾流片不同預制偏角時,矢量裝置的滾轉特性曲線。不難看出,擾流片無預制偏角時,矢量裝置滾轉力矩為0;通過設置擾流片的預制偏角,實現了矢量裝置的滾轉控制,同時滾轉力矩隨擾流片預制偏角增大而增大,并且噴管軸向推力僅出現小幅下降,研究范圍內變化量僅3.2%。
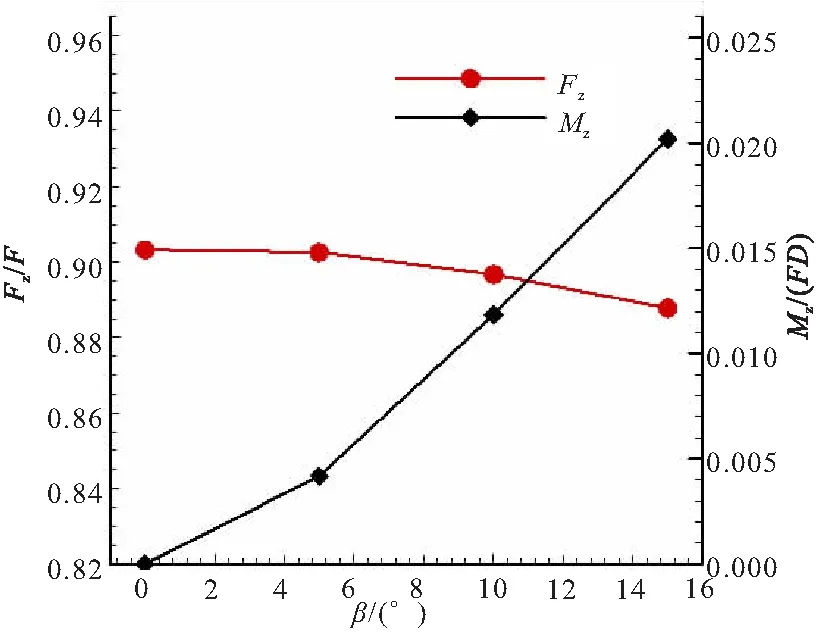
圖12 擾流片預制偏角對滾轉矢量特性曲線
為揭示上述矢量特性,積分計算各狀態下噴管擴張段壁面與擾流片的控制力矩。結果表明,擴張段壁面滾轉力矩為零,矢量控制裝置的滾轉力矩完全由擾流片提供。這是因為軸對稱擴張段內燃氣壓強作用力的作用方向為壁面法向,相對發動機中心軸無有效力臂,因此無法形成滾轉控制力矩。
同時,擾流片無偏角時,噴管內旋渦流動沿幾何對稱面對稱分布,擾流片受力方向與發動機軸線平行,因此無滾轉控制力矩。擾流片預制偏角后,因擾流片迎風面與噴管出口截面距離沿切向方面逐漸增大,擴張段高壓滯止區燃氣不斷從該間隙處排出,破壞了原有對稱分布的旋渦流動結構,如圖13(b)所示。因此,擾流片迎風面壓強不再對稱分布,見圖14,擾流片合力方向與噴管軸線存在一定偏角,從而形成了滾轉控制力矩。
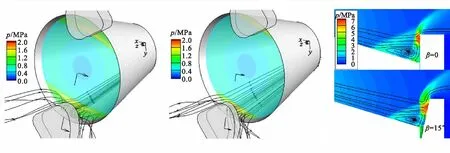
(a)β=0 (b)β=15° (c)Coutour plots on symmetry plane of the tab
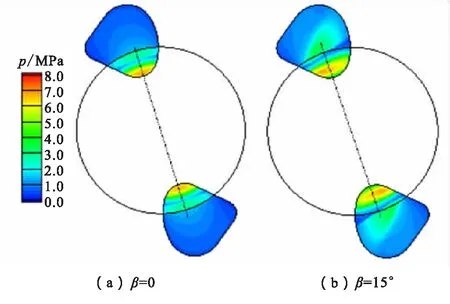
圖14 預制偏角對擾流片迎風面壓強的影響
此外,值得注意的是,隨著擾流片預制偏角的增大,高壓旋流區長度與高度分布均大幅下降,見圖13(c)所示,這將造成多擾流片裝置俯仰/偏航狀態下側向力的快速下降。圖15為同一面堵塞率下,俯偏狀態下擾流片預制偏角對側向力與軸向推力的影響,可見:軸向推力出現小幅波動,但側向力隨著預制偏角的增大而大幅下降,研究范圍內最大降幅達26.5%。因此,多擾流片裝置設計時需綜合考慮矢量裝置的滾轉與俯仰/偏航特性。
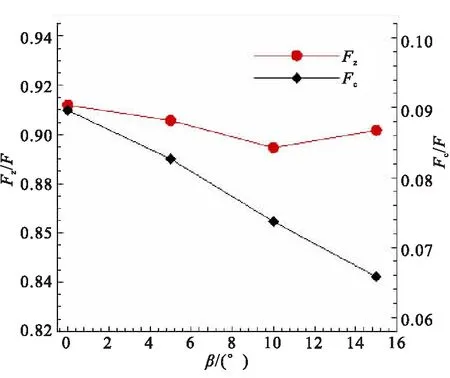
圖15 擾流片預制偏角對俯偏矢量特性的影響
6 結論
針對常規擾流片推力矢量控制方案無滾轉控制力矩的問題,設計了一種多擾流片矢量裝置,該方案可獨立實現俯仰/偏航和滾轉矢量多通道控制,滿足復雜工況下導彈對機動性與姿態控制的需求。文中對帶多擾流片裝置的噴管內流場開展了三維流動仿真,分析了其俯偏和滾轉矢量特性,獲得主要結論如下:
(1)對比單擾流片地面實驗結果,測試數據及羽流與仿真結果吻合良好,表明采用的仿真方法具有較高的可信度。
(2)所提出的多擾流片矢量裝置俯偏矢量控制規律與單擾流片特性一致。但多擾流片內部流場復雜,相鄰擾流片前旋流區存在明顯相互干擾,流動損失大,軸向推力小。
(3)通過采用帶預制偏角的擾流片,可獲得滾轉控制力矩,同時,滾轉力矩隨偏角的增大而增大,但將使俯偏狀態下側向力的大幅下降。
因此,從CFD仿真結果可看出,所提出的多擾流片矢量方案,在氣動上是可行的。
