對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu)在可變結(jié)構(gòu)機(jī)構(gòu)設(shè)計(jì)中的應(yīng)用
2021-07-15 01:46:12冷鴻彬
機(jī)械研究與應(yīng)用 2021年3期
冷鴻彬,顧 丹,章 偉,朱 鵬
(四川城市職業(yè)學(xué)院,四川 成都 610101)
0 引 言
隨著社會(huì)需求和科技的進(jìn)步,移動(dòng)機(jī)器人性能不斷完善,其應(yīng)用范圍也越來(lái)越廣泛。在排雷、搜捕、救援、星球探測(cè)等領(lǐng)域,要求機(jī)器人對(duì)各種復(fù)雜地形要有很好的通過(guò)性和適應(yīng)性,即具有一定的越障能力、避障能力和環(huán)境適應(yīng)能力[1]。
機(jī)器人的懸架設(shè)計(jì)對(duì)其移動(dòng)性能有著很大的影響,文中將對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu)應(yīng)用于可變結(jié)構(gòu)的機(jī)器人懸架機(jī)構(gòu)設(shè)計(jì),對(duì)與平行四邊形、平行六邊形兩種機(jī)構(gòu)的組合變胞機(jī)構(gòu)進(jìn)行了特性分析。在此基礎(chǔ)上設(shè)計(jì)了一種可變結(jié)構(gòu)的機(jī)器人懸架機(jī)構(gòu),該機(jī)構(gòu)在通過(guò)某些復(fù)雜地形,如高低不平的地面、狹窄的縫隙時(shí)能夠改變自身結(jié)構(gòu)形態(tài)和車(chē)身橫向?qū)挾龋虼司哂懈玫耐ㄟ^(guò)性和環(huán)境地貌適應(yīng)能力。
1 對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu)特性分析
圖1所示為對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu),其有兩個(gè)主要特征:①機(jī)構(gòu)特征:該機(jī)構(gòu)由兩套共用一個(gè)曲柄的對(duì)心式曲柄滑塊組成,兩曲柄BC、CD和兩連桿AB、DE的尺寸分別相等。兩套對(duì)心式曲柄滑塊機(jī)構(gòu)以C為中心呈中心對(duì)稱(chēng)分布;②運(yùn)動(dòng)特性:該機(jī)構(gòu)兩滑塊A、E的運(yùn)動(dòng)狀態(tài)始終相同,只是移動(dòng)方向相反[2]。曲柄逆時(shí)針轉(zhuǎn)動(dòng),當(dāng)α=180°時(shí),兩滑塊處于距離最遠(yuǎn)位置;曲柄繼續(xù)轉(zhuǎn)動(dòng)至α=360°時(shí),兩滑塊處于距離最近位置。
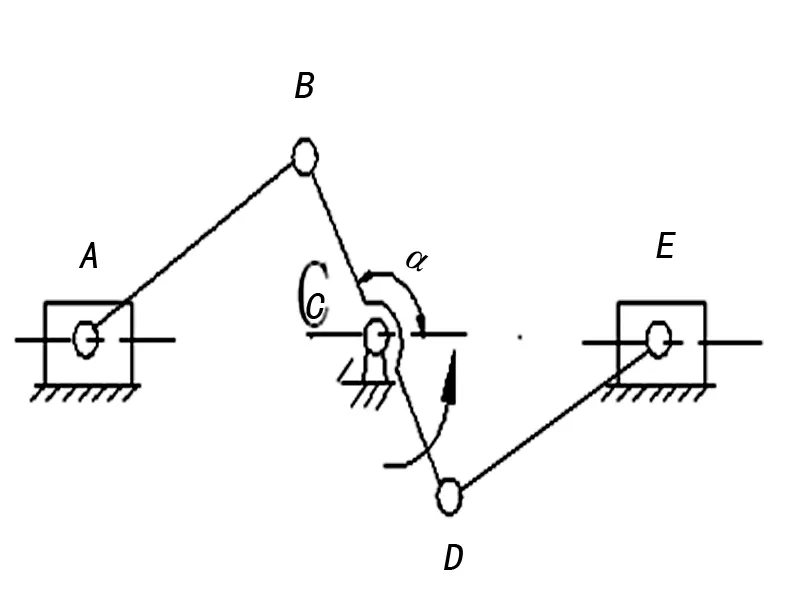
圖1 對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu)簡(jiǎn)圖
2 與平行四邊形組合的變胞機(jī)構(gòu)[3]特性分析
2.1 機(jī)構(gòu)組成原理
如圖2所示,該機(jī)構(gòu)由對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu)AFEGC和平行四邊形機(jī)構(gòu)ABCD組成,且自由度為1。平行四邊形機(jī)構(gòu)由于各構(gòu)件幾何尺寸的特殊關(guān)系(相對(duì)桿件長(zhǎng)度相等,或四個(gè)桿件長(zhǎng)度都相等)在運(yùn)動(dòng)過(guò)程中都會(huì)出現(xiàn)四個(gè)桿件共處同一直線(xiàn)位置的情況[4]。β隨兩滑塊距離的增大而增大,減小而減小。曲柄逆時(shí)針轉(zhuǎn)動(dòng),當(dāng)θ=180°時(shí)兩滑塊處于距離最遠(yuǎn)位置,β達(dá)到最大值βmax,若桿件取適當(dāng)?shù)闹凳功耺ax=180°,則機(jī)構(gòu)變形成一條直線(xiàn)且自由度變?yōu)?,拓?fù)浣Y(jié)構(gòu)圖也發(fā)生變化,屬于變胞機(jī)構(gòu)的研究范圍。當(dāng)曲柄繼續(xù)轉(zhuǎn)至θ=360°時(shí),兩曲柄處于距離最近位置,此時(shí)β達(dá)到最小值βmin,機(jī)構(gòu)處于收攏狀態(tài)。

圖2 變胞機(jī)構(gòu)簡(jiǎn)圖1.滑槽 2.滑塊1 3.連桿1 4.曲柄 5.桿1 6.桿2 7.桿3 8.桿4 9.連桿2 10.滑塊2
2.2 機(jī)構(gòu)構(gòu)態(tài)變換分析[5-7]
如圖2所示,將曲柄EF與水平的夾角θ(0°<θ<180°)作為機(jī)構(gòu)的第一構(gòu)態(tài),圖3中序號(hào)1~10與圖2中桿件序號(hào)對(duì)應(yīng)。其機(jī)構(gòu)對(duì)應(yīng)的拓?fù)鋱D如圖3所示。
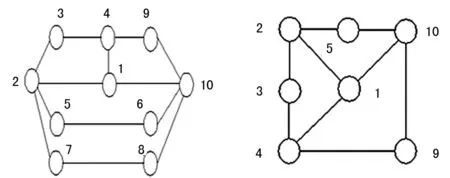
圖3 第一構(gòu)態(tài)拓?fù)?圖4 第二構(gòu)態(tài)拓?fù)鋱D
描述該構(gòu)態(tài)的鄰接矩陣為:
當(dāng)角θ= 180°時(shí),角β=βmax=180°,機(jī)構(gòu)處于水平共線(xiàn)狀態(tài),桿件5、6、7、8合并成一個(gè)構(gòu)件,統(tǒng)一用5表示,將其作為機(jī)構(gòu)的第二構(gòu)態(tài),圖4中序號(hào)1~10與圖2中桿件序號(hào)對(duì)應(yīng)。其機(jī)構(gòu)對(duì)應(yīng)的拓?fù)鋱D如圖4所示。
描述該構(gòu)態(tài)的鄰接矩陣為:
2.3 桿件尺寸關(guān)系

即 2a=2b+c
(1)
當(dāng)角度θ=360°時(shí),角度β有最小值βmin,且:

(2)
在△ABC中,由余弦定理得:
(3)
將式(1)、(2)帶入式(3)可得:
(4)
且由式(1)、(2)可知:
(5)
將式(5)帶入式(4)可得:
(6)
若βmin=60°,帶入式(4)可得:
(7)
若βmin=90°,帶入式(4)可得:
(8)
若要使βmin∈(arccos,90°),結(jié)合式(4)、(5)可得:
(9)
3 應(yīng) 用
3.1 機(jī)構(gòu)組成原理
如圖5(a)所示,該機(jī)構(gòu)由對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu)MHGLN和平行六邊形機(jī)構(gòu)ABCDEF組成,且自由度為1,平行六邊形機(jī)構(gòu)具有一定的可展開(kāi)可折疊性質(zhì)。以此機(jī)構(gòu)為懸架的機(jī)器人具有一定的變形能力,但穩(wěn)定性較差,因此在其基礎(chǔ)上設(shè)計(jì)了圖5(b)所示懸架機(jī)構(gòu)。
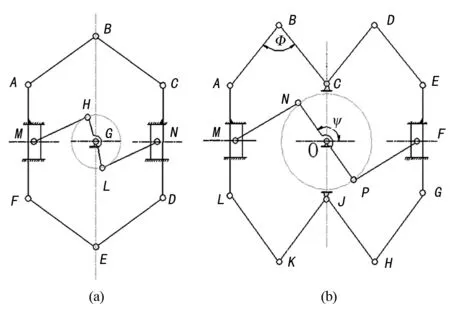
圖5 機(jī)構(gòu)簡(jiǎn)圖
該懸架機(jī)構(gòu)由兩個(gè)對(duì)稱(chēng)的平行六邊形機(jī)構(gòu)和一個(gè)對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu)組成,具有較強(qiáng)的穩(wěn)定性,且自由度為1,控制簡(jiǎn)單,其控制過(guò)程是通過(guò)曲柄轉(zhuǎn)動(dòng)控制兩滑塊的距離來(lái)改變角度φ的大小從而使機(jī)器人車(chē)身的橫向?qū)挾劝l(fā)生變化。當(dāng)ψ=180°時(shí),角度φ有最大值φmax且φmax=180°,此時(shí)機(jī)構(gòu)為完全展開(kāi)狀態(tài),橫向?qū)挾茸畲螅龅綑M向?qū)挾容^大的障礙物時(shí)可以不用繞行直接越過(guò);當(dāng)ψ=360°時(shí),角度φ有最小值φmin,此時(shí)機(jī)構(gòu)為收攏狀態(tài),橫向?qū)挾茸钚。龅姜M縫時(shí)可以直接穿行,從而使機(jī)器人具有更好的越障避障能力。
3.2 角度φ與ψ的關(guān)系


(10)
在△MNO中由余弦定理得:
(11)
(12)
則由式(10)~(12)可解得:
(13)
其中φ∈[0°,180°],ψ∈[0°,360°)
則式(13)就是角度φ與曲柄轉(zhuǎn)角ψ的關(guān)系式。
3.3 桿件尺寸關(guān)系
如圖5(b)所示,當(dāng)角度ψ=180°時(shí),角度φ有最大值φmax,且φmax=180°,此時(shí)機(jī)構(gòu)為完全展開(kāi)狀態(tài),且有:

(14)
當(dāng)ψ=360°時(shí),角度φ有最小值φmin,且:

(15)
在△ABC中由余弦定理得:
(16)
將式(14)、(15)、帶入式(16)可得:
(17)
由式(14)、(15)可知:
2b=4a-c>0,b-c>0,c=4a-2b>0
(18)
將式(18)帶入式(17)可得:
(19)
由式(14)可得:
(20)
將式(20)帶入式(18)可得:
(21)
由式(17)可知,若確定φmin的取值范圍時(shí),即可得出a、b、c之間的關(guān)系式。如取定φmin=60°,帶入式(17)并結(jié)合式(18)、(21)可得:

(22)
若取定φmin=90°, 帶入式(16)并結(jié)合式(18)、(21)可得:

(23)
(24)
3.4 橫向?qū)捳茸兓?/h3>

(25)
(26)
式(25)表明:可以通過(guò)特定的a、b、c的關(guān)系式來(lái)控制λ的取值范圍。
4 結(jié) 語(yǔ)
文中主要介紹了對(duì)稱(chēng)式對(duì)心雙曲柄滑塊機(jī)構(gòu)與平行四邊形機(jī)構(gòu)組合的變胞機(jī)構(gòu)特性,滿(mǎn)足變形要求的桿件尺寸關(guān)系和機(jī)構(gòu)構(gòu)態(tài)變換分析。在此基礎(chǔ)上設(shè)計(jì)了一種可變結(jié)構(gòu)的機(jī)器人懸架機(jī)構(gòu),該機(jī)構(gòu)能夠根據(jù)地形環(huán)境變化其橫向?qū)挾龋覟閱巫杂啥葯C(jī)構(gòu),控制簡(jiǎn)單,為可變形機(jī)構(gòu)的設(shè)計(jì)提供了新的思路。