考慮姿軌耦合的航天器高精度實(shí)時(shí)導(dǎo)航定軌方法
2021-07-18 08:52:58楊盛慶徐煒莉劉美師
上海航天 2021年2期
關(guān)鍵詞:測(cè)量
楊盛慶,陳 樺,徐煒莉,劉美師,王 禹,鐘 超
(1.上海航天控制技術(shù)研究所,上海 201109;2.上海市空間智能控制技術(shù)重點(diǎn)實(shí)驗(yàn)室,上海 201109;3.上海市宇航學(xué)會(huì),上海 200235)
0 引言
隨著體系的日趨完善,全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)測(cè)量系統(tǒng)已成為近地軌道上航天器軌道確定的主要手段[1-2]。基于GNSS 測(cè)量信息能夠?qū)崿F(xiàn)高精度的實(shí)時(shí)導(dǎo)航與定軌,是實(shí)現(xiàn)航天器自主智能軌道控制的基礎(chǔ)[3-4]。傳統(tǒng)的軌道動(dòng)力學(xué),通常將航天器視為質(zhì)點(diǎn)進(jìn)行分析和軌道積分仿真。實(shí)際上,航天器在進(jìn)行姿軌耦合的剛體運(yùn)動(dòng)。作為自主軌控輸入?yún)?shù)的實(shí)時(shí)導(dǎo)航與定軌領(lǐng)域,缺少姿軌耦合方面的研究工作。GNSS 接收機(jī)的原始測(cè)量數(shù)據(jù)基于瞬時(shí)的運(yùn)動(dòng)狀態(tài),測(cè)量點(diǎn)是GNSS 天線(xiàn)的相位中心[5]。早期,由于GNSS 測(cè)量精度在10 m 到100 m量級(jí),GNSS 天線(xiàn)安裝位置與航天器質(zhì)心偏差造成的定軌誤差基本可以忽略[6]。與之相反,相對(duì)運(yùn)動(dòng)的研究?jī)?nèi)容為編隊(duì)坐標(biāo)系下的相對(duì)軌道特征參數(shù)。相對(duì)運(yùn)動(dòng)過(guò)程中姿態(tài)變化對(duì)相對(duì)測(cè)量信息造成的影響較為明顯,姿軌耦合運(yùn)動(dòng)造成的影響不容忽視[7-8]。此外,相較絕對(duì)軌道的參數(shù)確定,相對(duì)運(yùn)動(dòng)可以忽略軌道攝動(dòng)環(huán)境中的長(zhǎng)期性和周期性影響。因此,航天器姿軌耦合問(wèn)題的研究工作,起初主要針對(duì)航天器的交匯對(duì)接、在軌服務(wù)等任務(wù)[9-10]。當(dāng)GNSS 測(cè)量達(dá)到米級(jí)精度,導(dǎo)航與定軌的精度要求也隨之提高,單點(diǎn)幾何定軌的算法中GNSS 天線(xiàn)的安裝關(guān)系不能再被忽略。
目前,高精度的絕對(duì)軌道定軌工作主要集中在事后精密定軌領(lǐng)域[11-12]。經(jīng)精密定軌處理的軌道數(shù)據(jù)在地心軌道系徑切法方向已達(dá)到厘米級(jí)精度,可以作為軌道控制效果評(píng)估的手段[13-15]。但是,由于事后精密定軌歷史數(shù)據(jù)充分,數(shù)據(jù)批處理過(guò)程中位速參數(shù)的確定可以采用數(shù)據(jù)擬合插值,不僅僅依賴(lài)于測(cè)量信息[16]。但是,姿軌控系統(tǒng)的星載導(dǎo)航與定軌算法對(duì)實(shí)時(shí)性要求較高。算法一般采用基于測(cè)量信息的貫序數(shù)據(jù)處理方法,在構(gòu)造濾波算法時(shí)需要針對(duì)GNSS 天線(xiàn)的安裝關(guān)系進(jìn)行精準(zhǔn)的位速修正[17]。研究表明,GNSS 天線(xiàn)相位中心不同于天線(xiàn)的幾何參考點(diǎn)(Antenna Reference Point,ARP),需要結(jié)合相位中心偏差(Phase Center Offset,PCO)和天線(xiàn)相位中心變化(Phase Center Variations,PCV)進(jìn)行優(yōu)化,能夠使事后精密定軌得到毫米級(jí)的精度提升[18]。因?yàn)镚NSS 天線(xiàn)相位中心的變化(毫米級(jí))相對(duì)于天線(xiàn)的安裝關(guān)系(米級(jí))是一個(gè)小量[13],本文主要針對(duì)天線(xiàn)的幾何參考點(diǎn)與航天器質(zhì)心的安裝關(guān)系開(kāi)展研究。
航天器作為剛體,不同質(zhì)點(diǎn)所受的引力偏差造成的影響表現(xiàn)為重力梯度力矩[19-20]。分析剛體的自由運(yùn)動(dòng)情況較為復(fù)雜,考慮到航天器在軌的姿態(tài)指向與軌道系的關(guān)系相對(duì)明確,可以圍繞其姿態(tài)特征提煉出針對(duì)安裝關(guān)系的位速修正項(xiàng),進(jìn)而分析由安裝關(guān)系造成的定軌誤差的解析解及其周期變化規(guī)律。航天器星載軟件的實(shí)時(shí)導(dǎo)航與定軌,通常采用基于測(cè)量信息轉(zhuǎn)換為慣性系狀態(tài)變量后的擴(kuò)展卡爾曼濾波算法。濾波算法中的狀態(tài)估計(jì)方程以地球引力中心項(xiàng)為主要因素,濾波過(guò)程能夠有效修正狀態(tài)量估計(jì)信息和GNSS 測(cè)量信息的白噪聲。對(duì)于在軌的穩(wěn)態(tài)運(yùn)動(dòng),姿態(tài)抖動(dòng)和GNSS 天線(xiàn)安裝關(guān)系導(dǎo)致的位速偏差可以視為狀態(tài)量信息與測(cè)量信息之間的噪聲。但是,針對(duì)SAR 衛(wèi)星載荷工作的多普勒頻移原理,往往需要進(jìn)行偏航為主的姿態(tài)導(dǎo)引補(bǔ)償[21-22]。此刻,GNSS 天線(xiàn)與航天器質(zhì)心之間的差異對(duì)導(dǎo)航與定軌的影響明顯。本文結(jié)合軌道動(dòng)力學(xué)原理,提出了考慮安裝關(guān)系的高精度GNSS 測(cè)量信息模擬方法,圍繞具有姿態(tài)導(dǎo)引要求的航天器實(shí)時(shí)導(dǎo)航與定軌算法,數(shù)學(xué)仿真證明了GNSS 天線(xiàn)安裝關(guān)系補(bǔ)償?shù)谋匾浴?/p>
1 軌道動(dòng)力學(xué)原理
1.1 二體問(wèn)題的積分常數(shù)
已知慣性系位置r、速度v,二體相對(duì)運(yùn)動(dòng)的微分方程[23-24]為

矢量叉積滿(mǎn)足

式中:r×v為積分常量,定義為軌道的動(dòng)量矩為[1]

使用點(diǎn)積式(1),可得

作為積分常數(shù),可以推導(dǎo)得到活力公式為

式中:a為軌道半長(zhǎng)軸。
利用橢圓方程半通徑的定義p=a(1?e2)及,軌道半長(zhǎng)軸滿(mǎn)足

1.2 慣性系下的剛體運(yùn)動(dòng)
考慮空間中的剛體運(yùn)動(dòng),剛體中任意質(zhì)點(diǎn)可以描述為慣性空間oIxIyIzI的平移運(yùn)動(dòng)和旋轉(zhuǎn)運(yùn)動(dòng),如圖1 所示,慣性空間中質(zhì)點(diǎn)mi的位置為
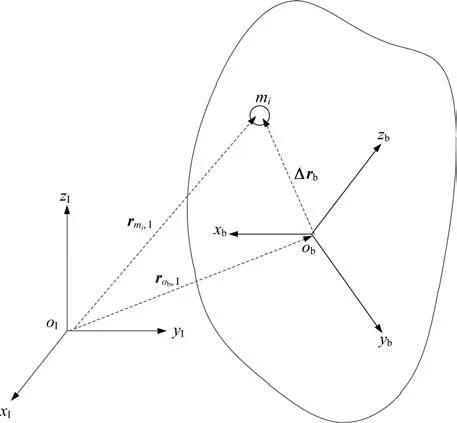
圖1 空間剛體的運(yùn)動(dòng)學(xué)Fig.1 Kinematics of rigid body in space

式中:A為本體系相對(duì)于慣性空間的旋轉(zhuǎn)矩陣;A?Δrb為質(zhì)點(diǎn)mi關(guān)于質(zhì)心的修正項(xiàng)。安裝關(guān)系Δrb不變的情況下,慣性空間中質(zhì)點(diǎn)mi的速度為

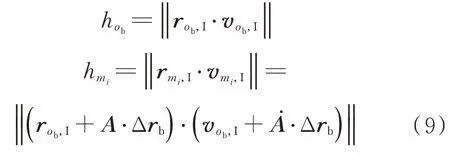
因此,軌道半長(zhǎng)軸的瞬態(tài)偏差為
1.3 軌道運(yùn)動(dòng)特征
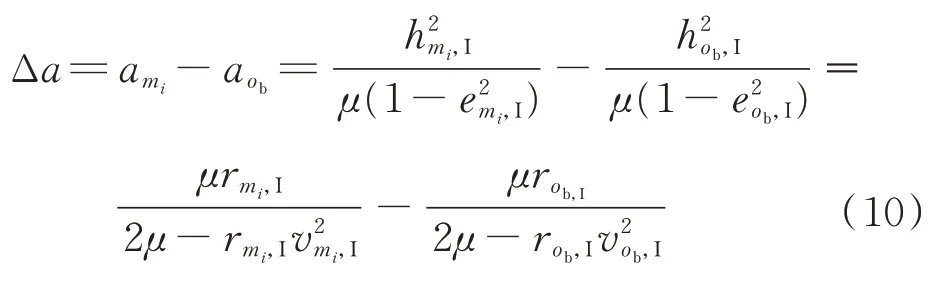
航天器作為剛體,在軌道運(yùn)動(dòng)過(guò)程中姿態(tài)特征的一種為保證星體的穩(wěn)態(tài)對(duì)地指向。理想情況是航天器的本體系與軌道系重合,即零姿態(tài)運(yùn)動(dòng)[25]。在理想情況的假設(shè)下,分析無(wú)攝軌道運(yùn)動(dòng)在慣性空間中的閉合曲線(xiàn)運(yùn)動(dòng)。如圖2 所示,本體系在一個(gè)軌道周期內(nèi)的指向變化相對(duì)于繞其yb旋轉(zhuǎn)1 周。
圖2 瞬時(shí)軌道運(yùn)動(dòng)的坐標(biāo)系Fig.2 Coordinate systems describing instantaneous orbital motion
不妨假設(shè)緯度幅角u=0 處的本體系到慣性系轉(zhuǎn)換矩陣為A0,不同緯度幅角處A(u)=Ry(u) ?A0。導(dǎo)數(shù)形式,其中,n為軌道角速度。
在零姿態(tài)運(yùn)動(dòng)假設(shè)的基礎(chǔ)之上,考慮本體系三軸獨(dú)立偏離質(zhì)心±2 m 的質(zhì)點(diǎn),進(jìn)行速度項(xiàng)補(bǔ)償與不補(bǔ)償?shù)臄?shù)值仿真。仿真分析如圖3 和圖4 所示,可以發(fā)現(xiàn)在進(jìn)行式(8)所示速度項(xiàng)修正的基礎(chǔ)之上,本體系X軸(對(duì)應(yīng)軌道系航向)安裝與質(zhì)心的位置偏值對(duì)半長(zhǎng)軸確定的影響軌道周期明顯,修正后半長(zhǎng)軸確定精度改良明顯。在本體系Y軸(對(duì)應(yīng)軌道系法向)安裝與質(zhì)心的位置偏值對(duì)半長(zhǎng)軸確定的影響較小。在本體系Z軸(對(duì)應(yīng)軌道系徑向指向地心)安裝與質(zhì)心的位置偏值對(duì)半長(zhǎng)軸確定存在相同極性的偏值現(xiàn)象,可以理解為在零姿態(tài)運(yùn)動(dòng)情況下質(zhì)點(diǎn)掃過(guò)的行程不同。此外,不同軸偏離質(zhì)心量的極性會(huì)影響波動(dòng)周期的相位特性。
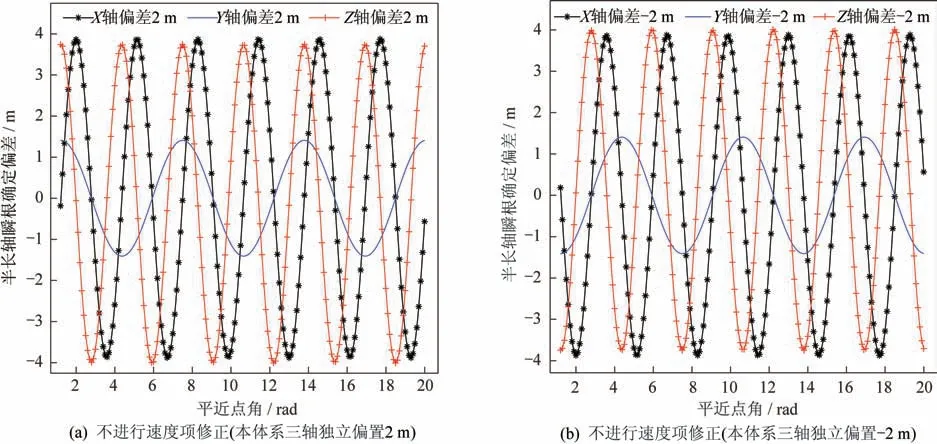
圖3 不進(jìn)行速度項(xiàng)修正的半長(zhǎng)軸確定偏差Fig.3 Semi?axis determing errors without velocity correction
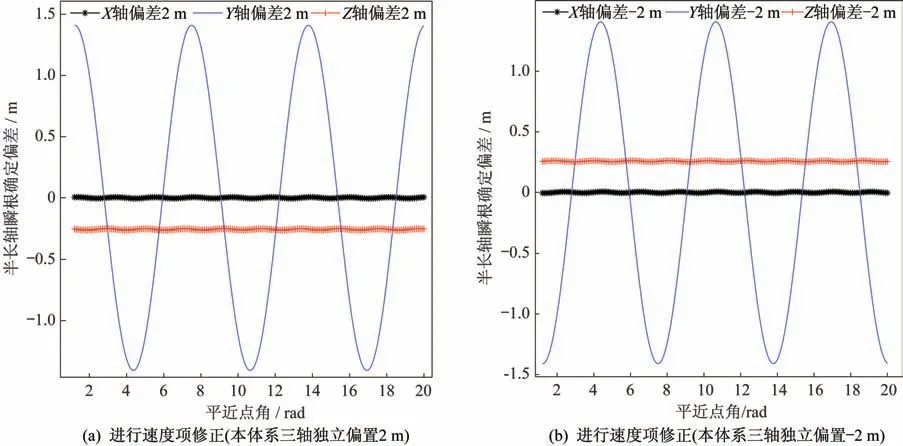
圖4 進(jìn)行速度項(xiàng)修正的半長(zhǎng)軸確定偏差Fig.4 Semi?axis determining errors with velocity correction
2 GNSS 天線(xiàn)安裝與航天器質(zhì)心
2.1 GNSS 天線(xiàn)的安裝關(guān)系
在半長(zhǎng)軸確定偏差的力學(xué)解析解基礎(chǔ)之上,進(jìn)一步分析姿態(tài)運(yùn)動(dòng)對(duì)半長(zhǎng)軸確定的影響。已知GNSS 天線(xiàn)幾何中心相對(duì)航天器質(zhì)心的安裝關(guān)系為Δrb=[Δx,Δy,Δz]T,使用刻畫(huà)軌道運(yùn)動(dòng)的坐標(biāo)轉(zhuǎn)換慣例,將航天器本體系到慣性系的轉(zhuǎn)換分為軌道系到慣性系、本體系到軌道系兩個(gè)步驟,物理含義清晰。如圖5 所示,假設(shè)GNSS 天線(xiàn)幾何中心相對(duì)航天器質(zhì)心的安裝關(guān)系在慣性系的表述為

圖5 GNSS 天線(xiàn)與航天器的安裝關(guān)系Fig.5 Installation relationship of GNSS antenna and spacecraft

已知慣性系航天器的質(zhì)心矢量rsat,GNSS 天線(xiàn)幾何中心的位置參數(shù)在慣性系下的描述為

記航天器質(zhì)心的速度為vsat,vsat=r?sat,GNSS 天線(xiàn)幾何中心的速度參數(shù)在慣性系下的描述為[26]

2.2 軌道系與慣性系的轉(zhuǎn)換
區(qū)別于理想情況的封閉軌道假設(shè),實(shí)際情況軌道受攝運(yùn)動(dòng)情況復(fù)雜,需要根據(jù)實(shí)時(shí)確定的軌道參數(shù)確定軌道系到慣性系的坐標(biāo)轉(zhuǎn)換矩陣Aoi,
2.3 本體系與軌道系的轉(zhuǎn)換
區(qū)別于理想情況的零姿態(tài)假設(shè),實(shí)際情況需要考慮航天器在主動(dòng)姿態(tài)運(yùn)動(dòng)控制情況下,由實(shí)時(shí)測(cè)量的姿態(tài)角確定本體系到軌道系的坐標(biāo)轉(zhuǎn)換矩陣:
其導(dǎo)數(shù)項(xiàng)滿(mǎn)足:

3 導(dǎo)航算法的設(shè)計(jì)與驗(yàn)證
3.1 GNSS 接收機(jī)測(cè)量信息的模擬
傳統(tǒng)的軌道仿真中,普遍采用軌道動(dòng)力學(xué)積分得到的位置、速度疊加誤差噪聲作為GNSS 接收機(jī)測(cè)量數(shù)據(jù)的模擬量。本文提出了考慮姿軌耦合的GNSS接收機(jī)測(cè)量信息模擬方法,要求GNSS 接收機(jī)測(cè)量數(shù)據(jù)的模擬考慮航天器的剛體運(yùn)動(dòng)特征、GNSS 天線(xiàn)的幾何中心rGNSS、vGNSS與航天器質(zhì)心rsat、vsat差別。
3.2 測(cè)量信息與導(dǎo)航定軌的濾波算法
航天器的姿軌控系統(tǒng)一般會(huì)對(duì)GNSS 接收機(jī)的測(cè)量數(shù)據(jù)進(jìn)行導(dǎo)航濾波與軌道確定。擴(kuò)展卡爾曼濾波(EKF)導(dǎo)航濾波算法流程可分為狀態(tài)估計(jì)、測(cè)量修正兩大步驟。濾波算法的狀態(tài)變量是慣性系的位置、速度X=[x,y,z,vx,vy,vz]T,濾波過(guò)程中使用軌道的二階微分方程進(jìn)行狀態(tài)估計(jì),其單拍積分的有限差分形式為
式中:加速度項(xiàng)
式中:μ為地球引力常數(shù);aJ2、aJ3、aJ4分別為地球引力場(chǎng)J2、J3和J4項(xiàng)攝動(dòng)加速度矢量;axJ2、ayJ2、azJ2為aJ2的三軸分量;axJ3、ayJ3、azJ3為aJ3的三軸分量;axJ4、ayJ4、azJ4為aJ4的三軸分量。
3.3 導(dǎo)航算法的天線(xiàn)安裝修正
在模擬剛體運(yùn)動(dòng)特征的GNSS 接收機(jī)測(cè)量信息的基礎(chǔ)之上,星載軟件的導(dǎo)航算法同樣需要結(jié)合姿態(tài)測(cè)量信息,將GNSS 天線(xiàn)測(cè)量的慣性系位置、速度轉(zhuǎn)換到航天器質(zhì)心。
以航天器質(zhì)心的慣性系位置、速度作為狀態(tài)變量和濾波觀測(cè)量,進(jìn)行EKF 濾波。濾波輸出的航天器質(zhì)心慣性系位置、速度與軌道動(dòng)力學(xué)積分理論值的偏差,即為導(dǎo)航濾波的精度。
在軌導(dǎo)航系統(tǒng)已知rGNSS、vGNSS,可得

3.4 姿軌耦合導(dǎo)航濾波的算法驗(yàn)證
在假設(shè)航天器質(zhì)心滿(mǎn)足軌道運(yùn)動(dòng)特征的基礎(chǔ)之上,天線(xiàn)幾何中心相對(duì)航天器質(zhì)心的慣性系位置、速度需要補(bǔ)償修正項(xiàng)。在上述兩類(lèi)質(zhì)點(diǎn)的慣性系位置、速度的基礎(chǔ)之上,分析軌道半長(zhǎng)軸的確定偏差。
同時(shí),結(jié)合導(dǎo)航濾波算法,分析不同質(zhì)點(diǎn)慣性系信息接入濾波時(shí)的定軌差別。為了驗(yàn)證高精度姿軌耦合的導(dǎo)航算法,設(shè)計(jì)如圖6 所示的導(dǎo)航精度驗(yàn)證系統(tǒng)。
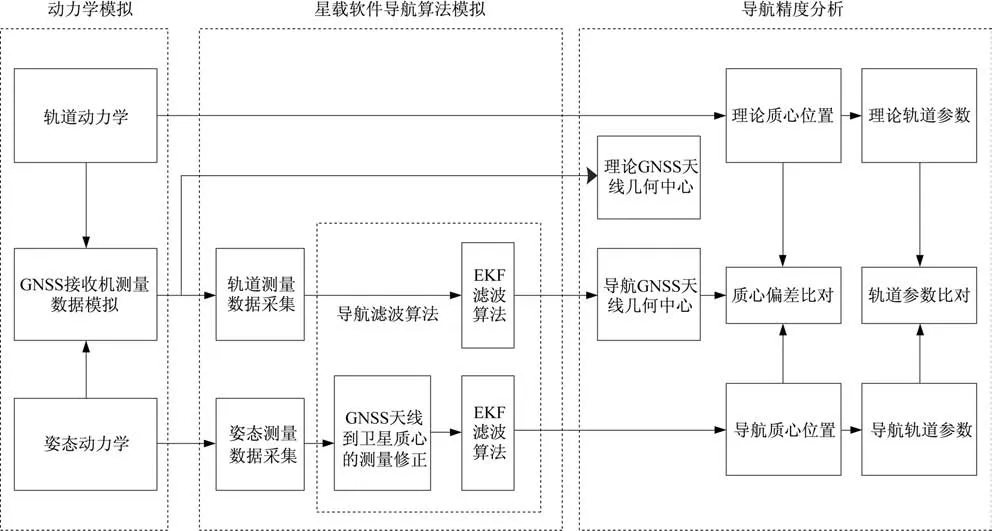
圖6 導(dǎo)航精度分析的邏輯說(shuō)明Fig.6 Logical illumination of the navigation precision analysis
仿真結(jié)果如圖7~圖9 所示。仿真結(jié)果顯示,當(dāng)航天器不進(jìn)行姿態(tài)導(dǎo)引時(shí),使用GNSS 天線(xiàn)測(cè)量的慣性系位速信息、補(bǔ)償安裝關(guān)系后的航天器質(zhì)心慣性系位速信息作為EKF 的濾波輸入,定軌偏差較小。當(dāng)航天器進(jìn)行姿態(tài)導(dǎo)引時(shí),定軌偏差出現(xiàn)與導(dǎo)引規(guī)律相應(yīng)的周期特性。
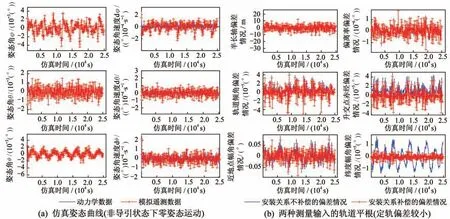
圖7 非導(dǎo)引狀態(tài)下兩種測(cè)量輸入的軌道平根Fig.7 Mean orbital elements without steering
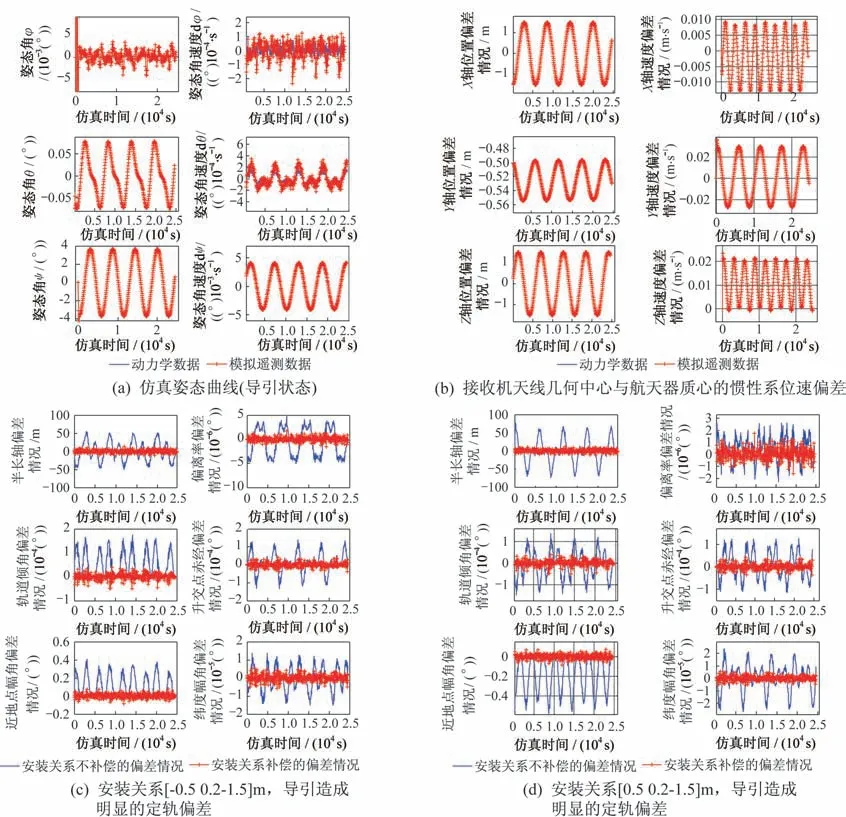
圖8 導(dǎo)引狀態(tài)下兩種測(cè)量輸入的軌道平根Fig.8 Mean orbital elements with steering
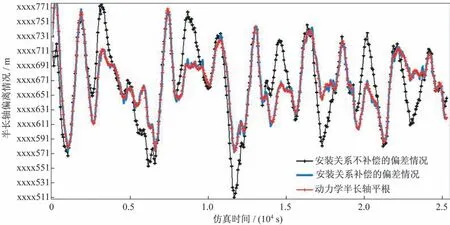
圖9 仿真過(guò)程中導(dǎo)引狀態(tài)下半長(zhǎng)軸平根變化情況Fig.9 Variations of the mean semi-major axis under the steering state during the simulation process
根據(jù)前文分析,本體系X軸安裝關(guān)系導(dǎo)致的周期特性明顯,設(shè)置Δrb=[±0.5,0.2,?1.5]T,單位m。如圖8(c)和圖8(d)所示,兩者安裝關(guān)系會(huì)導(dǎo)致周期性規(guī)律的極性偏差。
4 結(jié)束語(yǔ)
本文針對(duì)航天器自主軌控使用的軌道參數(shù),圍繞具有偏航導(dǎo)引姿態(tài)控制特征的合成孔徑雷達(dá)(SAR)衛(wèi)星存在的導(dǎo)引與定軌數(shù)據(jù)的特征關(guān)聯(lián)問(wèn)題,考慮采用不同質(zhì)點(diǎn)測(cè)量信息進(jìn)行導(dǎo)航濾波對(duì)定軌精度的影響,并進(jìn)行了仿真驗(yàn)證。本文的研究基于軌道動(dòng)力學(xué)原理,將航天器視為剛體運(yùn)動(dòng),分析了GNSS 天線(xiàn)幾何中心與航天器質(zhì)心在慣性系中的相對(duì)運(yùn)動(dòng)關(guān)系,明確了實(shí)時(shí)定軌誤差與慣性系位置、速度的關(guān)系。姿軌控制系統(tǒng)在使用GNSS 接收機(jī)測(cè)量數(shù)據(jù)時(shí),需求辨明測(cè)量數(shù)據(jù)屬于幾何法還是經(jīng)濾波處理的動(dòng)力學(xué)版本。后續(xù)研究將圍繞在軌大角度機(jī)動(dòng)狀態(tài)下的實(shí)時(shí)定軌精度與導(dǎo)航濾波參數(shù)優(yōu)化設(shè)計(jì)。結(jié)果表明,適當(dāng)?shù)卦龃笳`差協(xié)方差矩陣主對(duì)角線(xiàn)元素的速度相關(guān)項(xiàng)(認(rèn)為速度測(cè)量置信度低),能有效減小機(jī)動(dòng)對(duì)速度項(xiàng)造成的影響,從而保證實(shí)時(shí)導(dǎo)航軌道平半長(zhǎng)軸的穩(wěn)定性。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
