基于Matlab的純電動客車經濟性仿真分析
2021-07-22 03:11:24周翔孫長存王凱林永茂童驍
汽車實用技術 2021年13期
周翔,孫長存,王凱,林永茂,童驍
(江西博能上饒客車有限公司 技術中心,江西 上饒 334000)
前言
純電動客車的續駛里程受行駛工況、動力參數、儲能參數匹配等條件的影響[1-2]。客戶在項目初期均會對純電動客車的續駛里程提出一定的要求。因此在產品設計初期對客車的經濟性進行仿真顯得尤為重要。
有學者在汽車設計過程中,使用GT Power、Cruise等商業軟件,對客車的經濟性做了模擬仿真[3]。但是,這些商業化的計算分析軟件,價格昂貴,應用不方便,如操作過于繁瑣、所需參數過多、模型準備時間太長等。如果不是專業的CAE工程師操作,很難完成此項工作。而在整車的開發初期,某些參數獲取困難,模擬仿真難以實現。Matlab具有強大建模及編程功能,所以能很好地解決這一方面的問題[4-6]。
1 經濟性仿真的數據準備
1.1 車型參數導入
純電動公交車項目 6116BEVG1的車型仿真所需的主要數據見下表1所示。

表1 車型參數
1.2 路譜數據的導入
項目初期客戶提出公交車需在指定的路線按照公交車運行工況行駛,未開啟空調時續駛里程要達到230 km。為獲取準確的路譜數據,我司技術人員在該線路行駛的公交車上安裝由RACELOGIC公司生產的VBOX數據采集系統,記錄下車輛的車速、經緯度、海拔等信息(見圖1,為其中截取的一段)。

圖1 車輛數據及海拔圖像
可用VBOX Tools軟件直接導出成Matlab可直接讀取的EXCEL格式的數據文件。
1.3 電機外特性和效率數據的導入
將電機在各轉速和扭矩下的效率數據導入Matlab,電機效率Z當成電機轉速X和扭矩Y的函數,采用最小二乘法和回歸分析法擬合得的電機MAP圖見圖2[7-8]所示。求解得的電機效率的函數為:


圖2 電機MAP三維圖
2 經濟性仿真的計算模型
2.1 整車動力學模型
車輛驅動力:

Ttq為電機扭矩,ηt為傳動系統的機械效率,ig為主減速比。
滾動阻力:

其中f0和f1為與滾動阻力有關的系數,G為車輪對地面的壓力,ua為車速。
空氣阻力:

其中CD為空氣阻力系數,A為車輛迎風面積。
坡度阻力:

其中ɑ為坡度角,h為海拔。
加速阻力:

δ為汽車旋轉質量的轉換系數,a為車輛加速度。
根據汽車行駛阻力平衡方程[9-10]:

2.2 制動能量回收計算
制動能量回收需要滿足一定條件,如動力電池 SOC<90%,且車速>20 km/h。
當滿足上述條件時,假設車輛在車速v以減速度a行駛時,有平衡方程:

其中Fh為制動回收的反向力矩到車輪上的作用力。
Th為電機的回饋力矩,η為制動力回饋的機械傳遞效率。此時根據車速計算出電機轉速n,在回饋模式的外特性圖中求得額定工況下的最大扭矩T0,T0即為該車速下電機能產生的最大反向力矩。
當Fh≦F0時,制動時時回饋給儲能系統的充電功率Ph=n*T*ηh/9550,其中ηh為電機在該轉速和扭矩的回饋模式下的效率。
當Fh>F0時,Ph=n*T0*ηh/9550。
最終因能量回收使儲能電池增加的電能。

3 仿真結果分析
3.1 電耗計算
將上述計算模型編程,并輸入整車等相關參數后得到車速及累計電耗的曲線,見圖4(為截取的一段)。經計算的該純電動公交車在客戶指定工況下運行平均電耗為 0.92 kWh/km。為純電動車留有剩余 10%SOC的安全量,客戶要求的230 km的續駛里程應對應整車電量255.48×90%=229.93 kWh。為滿足客戶要求,電耗應小于1 kWh/km。由此可得,該車型仿真結果滿足客戶的續駛里程要求。

圖4 車速與電耗曲線圖
后續在樣車試驗驗證階段在客戶指定道路上以該工況運行,測得實際電耗為0.94 kWh/km,與仿真結果的0.92 kWh/km非常接近。
3.2 電機負載分析
對電機的實時功率進行計算并繪制成曲線,見圖 5。可以看出電機的實時功率基本都在100 kW(額定功率)以內,超過100 kW的最長時間僅為15 s,且功率值遠低于峰值功率。所以該車型動力性較為充足,使用中不存在電機負載長期過高的現象。
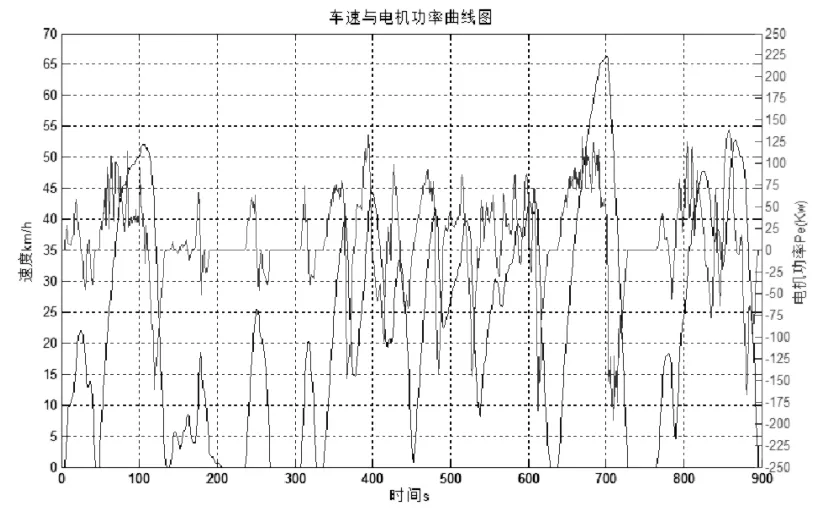
圖5 車速與電機功率曲線圖
4 結論
本文提出了一種基于 Matlab程序的純電動客車經濟性仿真分析方案,包含電機效率模型的建立、整車動力模型的建立和整車制動能量回收模型的建立。程序能通過導入實際的路譜,滿足客戶的定制化需求,并能對電機運行的負荷狀況進行評價。本方案經與實車路試結果對比,有較高的可參考性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
甘肅教育(2020年14期)2020-09-11 07:57:42
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
四川電力技術(2015年5期)2015-12-19 11:04:54
減速頂與調速技術(2015年4期)2015-03-16 03:39:41
時代英語·高二(2015年1期)2015-03-16 00:08:11
