無(wú)刷直流電機(jī)匝間短路故障定位及 定量評(píng)估方法研究
2021-07-25 03:04:07王吉亮王慧王驍賢陸思良
河北科技大學(xué)學(xué)報(bào) 2021年3期
王吉亮 王慧 王驍賢 陸思良

摘 要:針對(duì)無(wú)刷直流電機(jī)匝間短路故障問(wèn)題,提出一種結(jié)合深度遷移學(xué)習(xí)和多維特征擬合方法,以實(shí)現(xiàn)匝間短路故障的精確定位和定量評(píng)估。同步采集電機(jī)定子繞組的三相電流信號(hào),將一維電流信號(hào)轉(zhuǎn)化為圖像信號(hào),采用基于遷移學(xué)習(xí)的卷積神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)匝間短路故障的定位,在確定故障相之后,從電流信號(hào)中提取并篩選敏感特征,采用特征擬合方法實(shí)現(xiàn)故障等級(jí)的定量評(píng)估。實(shí)驗(yàn)結(jié)果表明,所提出的方法能夠?qū)崿F(xiàn)100%精度的故障相定位,同時(shí)故障定量評(píng)估的相對(duì)平均誤差低至4.33%。該方法對(duì)于永磁電機(jī)系統(tǒng)的定子繞組故障精確定位和精密診斷具有潛在的應(yīng)用價(jià)值。
關(guān)鍵詞:電機(jī)學(xué);無(wú)刷直流電機(jī);匝間短路;故障定位和定量評(píng)估;遷移學(xué)習(xí);特征擬合
中圖分類號(hào):TM351; TM307+.1 文獻(xiàn)標(biāo)識(shí)碼:A
doi:10.7535/hbkd.2021yx03006
Localization and evaluation method of interturn short circuitfault in BLDC motor
WANG Jiliang, WANG Hui, WANG Xiaoxian, LU Siliang
(College of Electrical Engineering and Automation, Anhui University, Hefei, Anhui 230601, China)
Abstract:Brushless direct current (BLDC) motors have been widely used in industry and factory automations, and electric vehicles. Interturn short circuit fault is one of the dominated faults for a BLDC motor, and this fault affects precision control, induces noise and vibration, and even causes motor burn down and fires. Hence, diagnosis of interturn short circuit fault of BLDC motor is of significance. This paper proposes a method that combines of transfer learning and features fitting to realize accurate fault localization and evaluation. First, the three-phase current signals of the motor stator windings are synchronously sampled. The one-dimensional current signals are transformed to an image, and then a transfer learning-based convolutional neural networks model is trained for fault localization. When the fault phase has been localized, the sensitive features are extracted and selected from the corresponding phase current, and then features fitting method is designed to qualitative evaluate the fault levels. Experimental results indicate that the proposed method can localize the faults with accuracy of 100%, and the relative average error of fault quantitative assessment is 4.33%. The proposed method shows potential applications for accurate localization and evaluation of stator winding faults in permanent magnet motor systems.
Keywords:
electrical machinery;BLDC motor;interturn short circuit;fault localization and evaluation;transfer learning;feature fitting
隨著稀土永磁材料和電力電子技術(shù)的發(fā)展,無(wú)刷直流電機(jī)以結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠、工作壽命長(zhǎng)等優(yōu)勢(shì),在工業(yè)自動(dòng)化和新能源電動(dòng)汽車領(lǐng)域得到廣泛應(yīng)用[1]。但工作環(huán)境惡劣時(shí),電機(jī)在高溫、振動(dòng)等情況下長(zhǎng)時(shí)間運(yùn)行時(shí)難免發(fā)生故障。根據(jù)電機(jī)使用過(guò)程中收集的失效數(shù)據(jù)來(lái)看,無(wú)刷直流電機(jī)系統(tǒng)的故障主要表現(xiàn)在繞組絕緣故障和驅(qū)動(dòng)電路故障,而繞組絕緣故障中的匝間短路故障占了很大比例[2]。匝間短路后電流激增、磁場(chǎng)畸變,容易對(duì)電機(jī)造成極大的損害,因此對(duì)無(wú)刷直流電機(jī)的匝間短路故障研究十分有必要。
目前,電機(jī)故障診斷技術(shù)通常可分為基于模型[3-5]、基于信號(hào)處理[6-8]、基于機(jī)器學(xué)習(xí)和深度學(xué)習(xí)[9-10]等類別。其中基于信號(hào)處理和機(jī)器學(xué)習(xí)的方法具有應(yīng)用方便、數(shù)據(jù)驅(qū)動(dòng)、簡(jiǎn)單高效等優(yōu)點(diǎn)。電機(jī)的電氣故障可以通過(guò)分析電機(jī)定子繞組的電流或電壓信號(hào)實(shí)現(xiàn)。常用的信號(hào)處理方法包括快速傅里葉變換(fast Fourier transform, FFT)、小波變換、希爾伯特變換等[11-12]。常用的機(jī)器學(xué)習(xí)和深度學(xué)習(xí)方法包括支持向量機(jī)、卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural network, CNN)、概率神經(jīng)網(wǎng)絡(luò)(probabilistic neural network, PNN)等[13-15]。例如,文獻(xiàn)[16]提出用小波分解的方法提取無(wú)刷直流電機(jī)三相電流的故障特征,再使用PNN訓(xùn)練分類識(shí)別。文獻(xiàn)[17]采用定子電流和振動(dòng)信號(hào)融合分析,結(jié)合小波包變換和FFT分析頻譜諧波分量,得到永磁同步電機(jī)故障時(shí)的諧波分量變化特征。文獻(xiàn)[18]從電機(jī)模型預(yù)測(cè)控制系統(tǒng)中的價(jià)值函數(shù)出發(fā),分析電機(jī)匝間短路時(shí)的定子電壓、電流,得到電機(jī)故障時(shí)價(jià)值函數(shù)會(huì)出現(xiàn)直流分量和二次諧波分量的結(jié)論。
以上文獻(xiàn)方法對(duì)于特定電機(jī)的特定故障識(shí)別具有較好的效果。但是,直流無(wú)刷電機(jī)的電流和反電動(dòng)勢(shì)都是梯形波,且受到脈寬調(diào)制噪聲的干擾,因而傳統(tǒng)方法對(duì)于實(shí)現(xiàn)直流無(wú)刷電機(jī)的故障定位和定量評(píng)估仍存在困難。為此,本文提出一種基于遷移學(xué)習(xí)和特征擬合方法,實(shí)現(xiàn)無(wú)刷直流電機(jī)匝間短路故障的精確定位和精確定量評(píng)估。
1 方法描述
本文提出的方法包含2個(gè)主要步驟:1)采用基于遷移學(xué)習(xí)的CNN模型對(duì)電機(jī)故障相進(jìn)行定位,2)采用多維特征擬合模型對(duì)電機(jī)故障程度進(jìn)行定量評(píng)估。
1.1 故障定位分析
將采集的無(wú)刷直流電機(jī)的三相電流信號(hào)轉(zhuǎn)換為RGB圖片,再采用基于遷移學(xué)習(xí)的GoogLeNet網(wǎng)絡(luò)對(duì)不同故障圖片分類實(shí)現(xiàn)電機(jī)定子繞組故障相的定位。
1.1.1 電流信號(hào)轉(zhuǎn)換
電機(jī)的三相電流以離散形式可表達(dá)為
iABC[n], n=1,2,…,N,(1)
其中:N=fs×K為采樣點(diǎn)數(shù),fs為采樣頻率,K為采樣時(shí)長(zhǎng)。將三相電流信號(hào)轉(zhuǎn)化為3通道RGB圖像的二維矩陣表達(dá)式見(jiàn)式(2)。
I(a,b,1)=iA[k+(b-1)×m+a], I(a,b,2)=iB[k+(b-1)×m+a], I(a,b,3)=iC[k+(b-1)×m+a],(2)
其中:a=1,2,…,m;b=1,2,…,n;m和n分別為二維矩陣行列數(shù);k為隨機(jī)選取的起始采樣點(diǎn)位置。得到3通道的二維矩陣后,為了方便轉(zhuǎn)化為8位的RGB圖像,需要將數(shù)值映射到0~255之間,見(jiàn)式(3)。
I(a,b,c)=I(a,b,c)-min(I(:,:,c))max(I(:,:,c))-min(I(:,:,c))×255,(3)
其中c = 1,2,3。
1.1.2 基于遷移學(xué)習(xí)的GoogLeNet模型實(shí)現(xiàn)故障定位
GoogLeNet是CHRISTIAN等學(xué)者提出的一種CNN深度學(xué)習(xí)網(wǎng)絡(luò)架構(gòu),該網(wǎng)絡(luò)共有22層,以實(shí)現(xiàn)高維數(shù)據(jù)的特征表示[19]。通常深層網(wǎng)絡(luò)都伴隨著缺陷,例如參數(shù)太多容易過(guò)擬合、計(jì)算復(fù)雜度大難以應(yīng)用、梯度往后容易消失等。GoogLeNet巧妙地在不同深度處增加了2個(gè)loss來(lái)避免梯度回傳消失的現(xiàn)象。在網(wǎng)絡(luò)寬度方面采用了Inception結(jié)構(gòu),這是一種網(wǎng)中網(wǎng)(network in network)的結(jié)構(gòu),即原來(lái)的結(jié)點(diǎn)也是一個(gè)網(wǎng)絡(luò)。為了提高訓(xùn)練的效率,本文采用預(yù)訓(xùn)練的GoogLeNet模型,該模型用于ILSVRC比賽中的圖像識(shí)別[20]。電機(jī)的故障相分為A,B,C 3類,加上電機(jī)健康狀態(tài)1類,因此本文將無(wú)刷直流電機(jī)電流轉(zhuǎn)換成的4類圖片再采用遷移學(xué)習(xí)的方法在預(yù)訓(xùn)練的GoogLeNet模型上進(jìn)行訓(xùn)練。在對(duì)新圖像分類時(shí),由于網(wǎng)絡(luò)最后一個(gè)可學(xué)習(xí)層和最終分類層包含對(duì)輸入圖像分類的圖像特征,因此需要將這2個(gè)層替換為適合新數(shù)據(jù)集的新層。最后,在保證分類精度的情況下,不斷嘗試將較淺網(wǎng)絡(luò)層的學(xué)習(xí)率設(shè)置為零來(lái)“凍結(jié)”這些層的權(quán)重。在訓(xùn)練過(guò)程中,網(wǎng)絡(luò)不再更新已凍結(jié)層的參數(shù)。由于不需要計(jì)算已凍結(jié)層的梯度,因此凍結(jié)多個(gè)初始層的權(quán)重可以顯著加快網(wǎng)絡(luò)訓(xùn)練速度并且可以防止這些層過(guò)擬合新數(shù)據(jù)集。訓(xùn)練完成后即可實(shí)現(xiàn)電機(jī)故障檢測(cè)和A相、B相、C相故障定位。
1.2 故障程度分析
在實(shí)現(xiàn)無(wú)刷直流電機(jī)故障相定位后,進(jìn)一步對(duì)故障相電流信號(hào)進(jìn)行分析以定量評(píng)估其故障程度。本文提取故障相電流的有效統(tǒng)計(jì)特性作為特征值,根據(jù)特征值和對(duì)應(yīng)的故障程度使用曲線擬合得到一條隨特征值變化的故障程度曲線。
1.2.1 故障特征提取與篩選
為了規(guī)范統(tǒng)計(jì)特性的計(jì)算,對(duì)電流信號(hào)進(jìn)行截?cái)嗪蛯?duì)齊。首先,根據(jù)式(4)計(jì)算1個(gè)周期的采樣點(diǎn)數(shù)TN。
TN=fswn,(4)
式中wn為電流信號(hào)基頻。wn可根據(jù)從電流的FFT頻譜圖中獲得,F(xiàn)FT公式見(jiàn)式(5)。
I(w)=∑N-1n=0iABC(n)e-j2πNwn, w=0,1,2,…,N-1。(5)
得到頻譜圖后,根據(jù)電機(jī)特性可知頻譜中最大幅值對(duì)應(yīng)的橫坐標(biāo)值就是其基頻值。隨后,從電流信號(hào)中提取12種時(shí)域統(tǒng)計(jì)特征,計(jì)算公式如表1所示。
由于信號(hào)的特征具有不確定性,因此進(jìn)一步從以上12個(gè)特征中通過(guò)散點(diǎn)圖篩選出和故障程度敏感性最高的幾個(gè)特征作為用于擬合的特征值。
1.2.2 曲線擬合
曲線擬合能夠從實(shí)驗(yàn)或觀測(cè)數(shù)據(jù)得到數(shù)據(jù)之間的固有規(guī)律,從而實(shí)現(xiàn)對(duì)未知數(shù)據(jù)的預(yù)測(cè)。本文采用線性擬合實(shí)現(xiàn)電機(jī)故障定量評(píng)估。線性擬合的本質(zhì)為采用最小二乘法通過(guò)最小化損失函數(shù)得到參數(shù)b。若給定一個(gè)n行m維的數(shù)據(jù)集X,考慮到參數(shù)b存在初值,故將X表示為
X=1x11x12…x1m 1x21x22…x2m1xn1xn2…xnm,(6)
其對(duì)應(yīng)輸出為Y=[y1,y2,…,yn]T,設(shè)參數(shù)即權(quán)重b=[b0,b1,…,bm]T,則可以根據(jù)式(7)得到輸出理論值y^。
y^(i)=1,xi1,xi2,…,ximb0bm, i=1,2,…,n。(7)
假設(shè)損失函數(shù)為
S(b)=∑ni=1(y(i)-y^(i))2,(8)
由式(7)可得
S(b)=yTy-2bTXTy+bTXTXb,(9)
式(9)中,x,y已知,那么該損失函數(shù)是一個(gè)多元函數(shù),其自變量為b0,b1,b2,…,bm。若要使損失函數(shù)最小,就是求得一組b值,使得該損失函數(shù)的值達(dá)到最小。將b看成列向量,則損失函數(shù)對(duì)于列向量的微分公式為
S(b)b=-2XTy+2XTXb。(10)
令式(10)等于零,得到權(quán)值b的表達(dá)式如下:
b=XTX-1XTy(11)
分別對(duì)三相故障電流信號(hào)的敏感特征進(jìn)行擬合,即可得分別得到三相匝間短路故障的定量評(píng)估模型。
2 實(shí)驗(yàn)平臺(tái)與數(shù)據(jù)集
2.1 實(shí)驗(yàn)平臺(tái)
為了驗(yàn)證本文提出方法的有效性,搭建如圖1 a)所示的外轉(zhuǎn)子無(wú)刷直流電機(jī)實(shí)驗(yàn)平臺(tái)。實(shí)驗(yàn)裝置由外轉(zhuǎn)子無(wú)刷直流電機(jī)(27N30P)、相同型號(hào)的電機(jī)用作負(fù)載發(fā)電機(jī)、電機(jī)控制器、AC-DC整流器、電子負(fù)載(DL3021,Rigol)、數(shù)據(jù)采集卡(USB4472,NI)、3個(gè)電流探頭(80i-110s, Fluke)組成。其中,電機(jī)參數(shù)如表2所示。電機(jī)和發(fā)電機(jī)通過(guò)聯(lián)軸器相連,發(fā)電機(jī)三相交流輸出經(jīng)過(guò)整流器變?yōu)橹绷鳎俳尤朐O(shè)置為恒電阻模式的電子負(fù)載。
無(wú)刷直流電機(jī)匝間短路的實(shí)驗(yàn)示意圖如圖1 b)所示,在電機(jī)每一相繞組的9槽線圈上分別引出接頭,連接不同槽的接頭即可實(shí)現(xiàn)不同大小的匝間短路故障設(shè)置。由于本實(shí)驗(yàn)中電機(jī)短路故障程度較大,故選用一個(gè)0.1 Ω的電阻(Rf)在短路處串聯(lián)以保護(hù)電機(jī)。例如,相鄰兩槽引出接頭串聯(lián)0.1 Ω電阻,即表示該相短路比例為1/9。電機(jī)在不同故障狀態(tài)的電流通過(guò)電流鉗采集,采樣頻率fs設(shè)置為20 kHz。
2.2 數(shù)據(jù)集
在本文中,通過(guò)連接每相不同槽的引出接頭來(lái)實(shí)現(xiàn)短路比例設(shè)置。考慮到短路比例過(guò)大時(shí)會(huì)造成電流過(guò)大和線圈溫度過(guò)熱,因此本文實(shí)驗(yàn)的短路比例只設(shè)置為1/9,2/9,3/9,4/9。圖2所示分別是實(shí)驗(yàn)獲得的A相線圈短路1/9,2/9,3/9和4/9的三相電流信號(hào)。從圖2中三相電流信號(hào)可以看出,在短路時(shí),A相電流的平均幅值大于其他兩相幅值,如圖2b)中A相電流的平均幅值(1.94 A)稍大于其他兩相幅值(1.86 A和1.87 A)。另外,在短路比例增大時(shí),各電流信號(hào)都隨之增大。由于故障相幅值的增大主要體現(xiàn)在波形的稍微上升,并沒(méi)有具體的位置體現(xiàn),所以通過(guò)信號(hào)處理的方法得到少數(shù)故障特征通常缺少部分故障信息。
本文通過(guò)大量數(shù)據(jù)的深度特征表示以實(shí)現(xiàn)故障分類。將三相電流信號(hào)分別截取50 176個(gè)采樣點(diǎn),采用式(1)—式(3)生成3通道的二維矩陣并轉(zhuǎn)化RGB圖像。需要分類的有A,B,C共3類故障及正常4種模式。4種模式由三相電流做成的彩色圖像如圖3所示,其中故障模式的圖是從各短路比例數(shù)據(jù)中選取,圖中顏色的不同表示三相電流幅值的不同。從圖3中可以看出,
不同模式之間光暈色度有一定差異,而同一故障模式中不同故障比例的圖中在色度分布中也有差距。
隨后,從每種模式中選取600組數(shù)據(jù)作為數(shù)據(jù)集,其中A,B,C共3類故障模式數(shù)據(jù)是由各150組短路比例1/9,2/9,3/9,4/9的數(shù)據(jù)組成的,如表3所示。每個(gè)模式選取420組共1 680組作為訓(xùn)練集,其余720組作為測(cè)試集。
3 故障定位實(shí)驗(yàn)結(jié)果與討論
3.1 深度學(xué)習(xí)模型的訓(xùn)練及故障定位精度分析
3.1.1 訓(xùn)練過(guò)程
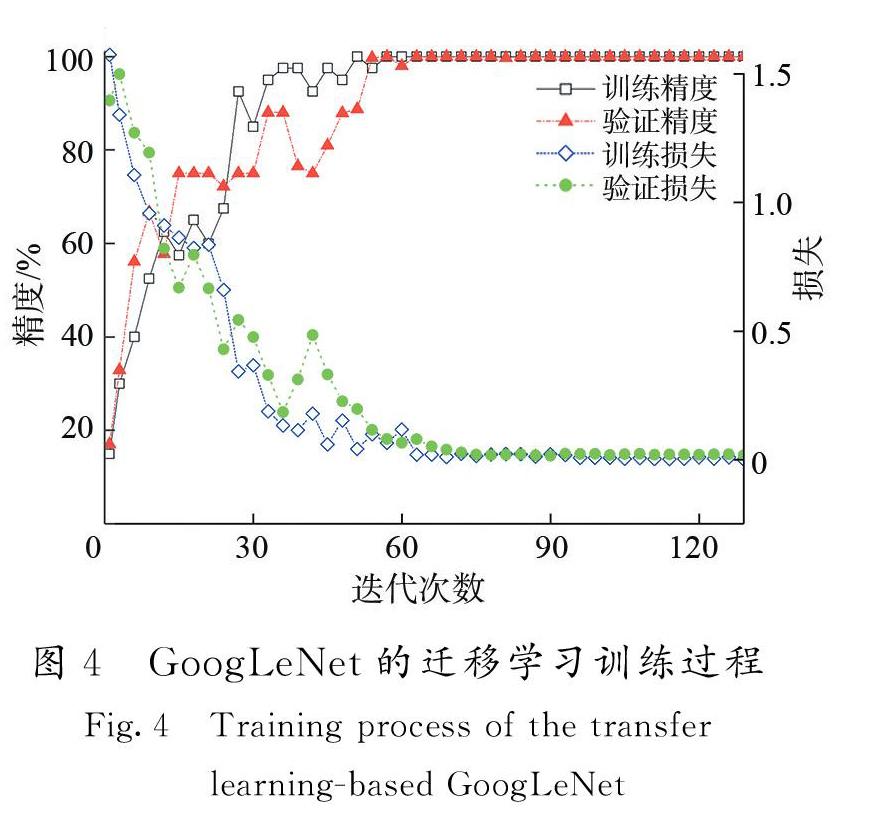
本文采用GoogLeNet的遷移學(xué)習(xí)對(duì)4種電機(jī)狀態(tài)生成的圖像
進(jìn)行訓(xùn)練和驗(yàn)證。在不影響網(wǎng)絡(luò)分類準(zhǔn)確率前提下將網(wǎng)絡(luò)的前10層凍結(jié),以降低網(wǎng)絡(luò)參數(shù)并提高網(wǎng)絡(luò)計(jì)算速度。將網(wǎng)絡(luò)的驗(yàn)證間隔設(shè)置為3次迭代,訓(xùn)練結(jié)果如圖4所示。可見(jiàn)模型在33次迭代訓(xùn)練后達(dá)到100%的訓(xùn)練精度,同時(shí)其驗(yàn)證精度在63次迭代之后達(dá)到100%。與此相對(duì),模型的損失隨著迭代次數(shù)的增加在不斷降低,最終在72次迭代后訓(xùn)練和驗(yàn)證的損失都收斂至零線附近。
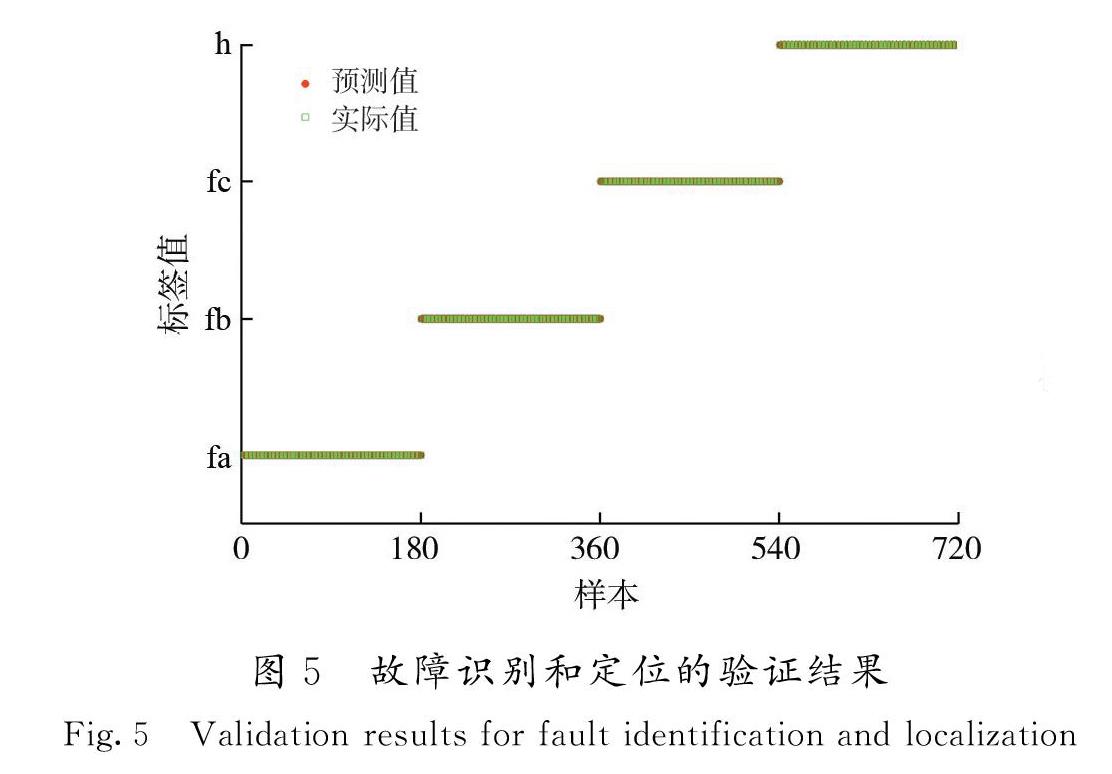
3.1.2 測(cè)試結(jié)果
在模型訓(xùn)練完成之后對(duì)測(cè)試集進(jìn)行分類測(cè)試,模型區(qū)分健康電機(jī)以及不同故障相的分類結(jié)果如圖5所示,可見(jiàn)測(cè)試樣本的分類精度達(dá)到100%,驗(yàn)證了本文所提故障定位方法的有效性。為了進(jìn)一步檢查GoogLeNet模型對(duì)短路故障類型的區(qū)分效果,從每種模式類型180組驗(yàn)證數(shù)據(jù)隨機(jī)抽取1組,網(wǎng)絡(luò)預(yù)測(cè)狀態(tài)和真實(shí)狀態(tài)的矩陣如圖6所示。從圖6可以看出,網(wǎng)絡(luò)對(duì)故障模式正確預(yù)測(cè)的概率都超過(guò)97%,而誤判為其他故障模式的概率接近為零。該結(jié)果再次驗(yàn)證了本文方法對(duì)無(wú)刷直流電機(jī)故障相定位的效果。
3.2 本文方法和傳統(tǒng)方法的對(duì)比
為了驗(yàn)證本文方法的優(yōu)越性,采用文獻(xiàn)[16]所述方法進(jìn)行對(duì)比,該方法采用小波變換提取故障特征,再使用PNN網(wǎng)絡(luò)對(duì)無(wú)刷直流電機(jī)的故障進(jìn)行分類定位。
對(duì)比方法數(shù)據(jù)集的劃分模式與本文相同,分類結(jié)果如圖7所示,其準(zhǔn)確率只有78.2%。因此,本文提出的方法相比于傳統(tǒng)方法在多數(shù)據(jù)故障定位方面具有明顯優(yōu)勢(shì)。
4 故障定量分析結(jié)果與討論
4.1 特征提取和篩選結(jié)果
在確定電機(jī)的故障相之后,進(jìn)一步采用本文提出的方法定量評(píng)估短路故障的大小。首先根據(jù)表1計(jì)算1/9—4/9不同短路比例信號(hào)的12個(gè)時(shí)域特征,畫(huà)出散點(diǎn)圖,對(duì)比12種統(tǒng)計(jì)特性在隨短路比例改變時(shí)的趨勢(shì)。隨后,選出相關(guān)性高的4個(gè)特征值,即平均值、標(biāo)準(zhǔn)差、方差、峭度因子,作為故障相電流的特征值。圖8所示為A相短路時(shí)A相電流信號(hào)特征隨匝間短路故障程度變化的結(jié)果。隨后通過(guò)線性擬合得到隨故障比例變化的曲線,實(shí)現(xiàn)故障大小的定量評(píng)估。
4.2 數(shù)據(jù)擬合結(jié)果
針對(duì)A,B,C 3種故障相電流信號(hào),從故障相短路比例1/9,2/9,3/9,4/9(對(duì)應(yīng)標(biāo)簽為1,2,3,4)中選取其中3種各50組數(shù)據(jù)進(jìn)行曲線擬合,以剩余一種短路比例數(shù)據(jù)50組作為測(cè)試數(shù)據(jù),具體選取方式如表4所示。
最終得到曲線擬合結(jié)果如式(2)所示。
y=yA=-7.195+0.399x1+9.153x2-3.127x3+0.026x4, yB=-7.065-6.889x1+11.909x2-0.431x3-0.002x4, yC=-5.953-6.393x1+10.434x2+0.174x3-0.008x4。(12)
式中:yA, yB, yC分別為A,B,C相故障時(shí)對(duì)應(yīng)的故障定量評(píng)估輸出;
x1,x2,x3和x4分別為篩選出的4個(gè)指標(biāo)。將測(cè)試數(shù)據(jù)輸入式(12)得到測(cè)試結(jié)果如圖9所示。可以看出預(yù)測(cè)結(jié)果與實(shí)際結(jié)果稍有偏差,A,B,C三相預(yù)測(cè)結(jié)果和實(shí)際結(jié)果之間的相對(duì)誤差分別計(jì)算為7.84%, 3.31%, 1.83%,三相的平均相對(duì)誤差為4.33%。由于圖1 a)中的測(cè)試電機(jī)的定子繞組線圈為手工繞制,因此每槽線圈的電阻值存在一定誤差。工業(yè)規(guī)模生產(chǎn)的電機(jī)一致性較高,采用本方法進(jìn)行匝間短路定量分析的誤差將有望進(jìn)一步降低。
5 模型的適應(yīng)性實(shí)驗(yàn)
本文設(shè)計(jì)了一個(gè)深度遷移模型并采用11510型號(hào)的電機(jī)進(jìn)行訓(xùn)練,以實(shí)現(xiàn)電機(jī)匝間短路故障的模式識(shí)別。為進(jìn)一步驗(yàn)證該模型的適應(yīng)性,將訓(xùn)練得到的模型在型號(hào)
圖10 新電機(jī)無(wú)訓(xùn)練時(shí)故障識(shí)別和 定位的驗(yàn)證結(jié)果
Fig.10 Verification results of fault identificationand location for new motor without training
6010的無(wú)刷直流電機(jī)(100 W, 18N24P)上進(jìn)行測(cè)試。從4種模式隨機(jī)抽取180組共720組作為測(cè)試集,利用現(xiàn)有模型對(duì)新電機(jī)的數(shù)據(jù)進(jìn)行測(cè)試,結(jié)果如圖10所示,計(jì)算得到的識(shí)別正確率只有25%。由該結(jié)果可知,不同的電機(jī)故障信號(hào)特征存在區(qū)別,模型不能很好地適用不同種類的電機(jī)。
為了解決此問(wèn)題,進(jìn)一步將6010電機(jī)的4種故障模式數(shù)據(jù)加入原遷移模型中進(jìn)行訓(xùn)練。該模型共有2種電機(jī)的8種故障類型,模型的訓(xùn)練過(guò)程及測(cè)試結(jié)果分別如圖11和圖12所示。此時(shí),模型訓(xùn)練花費(fèi)了18 min,對(duì)8種電機(jī)模式的識(shí)別正確率達(dá)到100%。由此可見(jiàn),由于本文方法為有監(jiān)督學(xué)習(xí)方法,為了實(shí)現(xiàn)不同電機(jī)不同故障類型的分類,還需要加入該種電機(jī)的故障類型數(shù)據(jù)進(jìn)行訓(xùn)練。在后續(xù)的研究中,可以進(jìn)一步研究不同種類電機(jī)的數(shù)據(jù)特點(diǎn),以期在無(wú)法獲得足夠多的電機(jī)訓(xùn)練數(shù)據(jù)情況下提升模型的分類精度和適應(yīng)性。
6 結(jié) 語(yǔ)
本文提出了一種結(jié)合遷移學(xué)習(xí)和特征擬合方法,實(shí)現(xiàn)了無(wú)刷直流電機(jī)匝間短路故障的準(zhǔn)確定位和精確定量分析。通過(guò)采集電機(jī)的三相電流信號(hào)并轉(zhuǎn)換為圖像信號(hào),基于遷移學(xué)習(xí)的GoogLeNet深度網(wǎng)絡(luò)模型,實(shí)現(xiàn)了精度100%的電機(jī)故障檢測(cè)和定位。在確定故障相之后,從電流信號(hào)中提取并篩選敏感多維特征進(jìn)行擬合,實(shí)現(xiàn)了平均相對(duì)誤差為4.33%的故障定量分析。所提出的方法具有精度高、效率高、容易應(yīng)用等優(yōu)點(diǎn),有望推廣應(yīng)用于永磁電機(jī)系統(tǒng)的在線故障診斷和狀態(tài)監(jiān)測(cè)。由于實(shí)驗(yàn)中選擇串聯(lián)短路的小電阻保持不變,因而對(duì)實(shí)際電機(jī)短路的模擬還不夠精確,未來(lái)擬選擇不同小電阻,深入研究其對(duì)無(wú)刷直流電機(jī)故障識(shí)別和定位的影響。
參考文獻(xiàn)/References:
[1] 鄭淑琴,龍江啟.電動(dòng)汽車永磁無(wú)刷輪轂電機(jī)控制策略建模[J].中國(guó)機(jī)械工程,2017,28(6):744-749.
ZHENG Shuqin,LONG Jiangqi.Control tactics modeling of electric vehicle permanent magnet brushless wheel motors[J].China Mechanical Engineering,2017,28(6):744-749.
[2] 程啟華,盛國(guó)良.無(wú)刷直流電動(dòng)機(jī)匝間短路故障檢測(cè)及識(shí)別方法[J].微特電機(jī),2014,42(2):14-17.
CHENG Qihua,SHENG Guoliang.Detection and recognition on inter turn short- circuit fault of brushless DC motor[J].Small & Special Electrical Machines,2014,42(2):14-17.
[3] 李爭(zhēng),馮威,趙江.永磁同步直線電機(jī)模糊預(yù)測(cè)控制策略[J].河北科技大學(xué)學(xué)報(bào),2020,41(4):289-295.
LI Zheng,F(xiàn)ENG Wei,ZHAO Jiang.Fuzzy predictive control strategy of permanent magnet linear synchronous motor[J].Journal of Hebei University of Science and Technology,2020,41(4):289-295.
[4] WANG H,LU S L,QIAN G,et al.A two-step strategy for online fault detection of high-resistance connection in BLDC motor[J].IEEE Transactions on Power Electronics,2020,35(3):3043-3053.
[5] 姚存治,尚展壘.模型預(yù)測(cè)控制五相感應(yīng)電機(jī)系統(tǒng)開(kāi)關(guān)故障診斷[J].電氣傳動(dòng),2020,50(12):104-110.
YAO Cunzhi,SHANG Zhanlei.Open-switch fault diagnosis of five-phase induction motor system based on model predictive control[J].Electric Drive,2020,50(12):104-110.
[6] 麻少旭,郭立煒,安國(guó)慶,等.基于改進(jìn)型相關(guān)算法的變頻異步電機(jī)定子故障診斷[J].河北科技大學(xué)學(xué)報(bào),2014,35(1):39-45.
MA Shaoxu,GUO Liwei,AN Guoqing,et al.Stator fault diagnosis in induction motor fed with variable converter via improved correlation algorithm[J].Journal of Hebei University of Science and Technology,2014,35(1):39-45.
[7] 郝亮亮,常江,李洪學(xué),等.核電多相角形無(wú)刷勵(lì)磁機(jī)定子匝間短路故障特征分析[J].中國(guó)電機(jī)工程學(xué)報(bào),2019,39(22):6726-6736.
HAO Liangliang,CHANG Jiang,LI Hongxue,et al.Characteristics analysis of stator inter-turn short circuits in nuclear power multi-phase angular brushless exciter[J].Proceedings of the CSEE,2019,39(22):6726-6736.
[8] 郭立煒,周昇龍,安國(guó)慶,等.基于中點(diǎn)電壓信號(hào)分析的逆變器功率管開(kāi)路故障診斷研究[J].河北科技大學(xué)學(xué)報(bào),2015,36(1):45-51.
GUO Liwei,ZHOU Shenglong,ANGUO Qing,et al.Diagnosis of inverter switch open circuit faults based on neutral point voltage signal analysis[J].Journal of Hebei University of Science and Technology,2015,36(1):45-51.
[9] 郝亮亮,李佳慧,段賢穩(wěn),等.核電多相環(huán)形無(wú)刷勵(lì)磁機(jī)轉(zhuǎn)子繞組短路故障特征分析[J].電工技術(shù)學(xué)報(bào),2020,35(6):1251-1261.
HAO Liangliang,LI Jiahui,DUAN Xianwen,et al.Characteristic analysis of short-circuit fault in rotor winding of nuclear power multi-phase annular brushless exciter[J].Transactions of China Electrotechnical Society,2020,35(6):1251-1261.
[10]李垣江,張周磊,李夢(mèng)含,等.采用深度學(xué)習(xí)的永磁同步電機(jī)匝間短路故障診斷方法[J].電機(jī)與控制學(xué)報(bào),2020,24(9):173-180.
LI Yuanjiang,ZHANG Zhoulei,LI Menghan,et al.Fault diagnosis of inter-turn short circuit of permanent magnet synchronous motor based on deep learning[J].Electric Machines and Control,2020,24(9):173-180.
[11]黃銘,鄭永軍,汪洋百慧.基于分?jǐn)?shù)階傅里葉濾波的電動(dòng)助力器故障檢測(cè)[J].振動(dòng)與沖擊,2020,39(23):263-270.
HUANG Ming,ZHENG Yongjun,WANG Yangbaihui.Fault detection of electric booster based on fractional Fourier filtering[J].Journal of Vibration and Shock,2020,39(23):263-270.
[12]葛興來(lái),鄒丹.多層降噪技術(shù)及Hilbert變換的軸承故障診斷方法[J].電機(jī)與控制學(xué)報(bào),2020,24(8):9-17.
GE Xinglai,ZOU Dan.Bearing fault diagnosis method of multi-layer denoising technologies and Hilbert transformation[J].Electric Machines and Control,2020,24(8):9-17.
[13]薛征宇,鄭新潮,邱翔,等.基于支持向量機(jī)的船舶感應(yīng)電機(jī)軸承故障在線診斷方法[J].船海工程,2020,49(5):1-5.
XUE Zhengyu,ZHENG Xinchao,QIU Xiang,et al.The online diagnosis method of marine induction motor bearing fault based on SVM[J].Ship & Ocean Engineering,2020,49(5):1-5.
[14]馬立玲,劉瀟然,沈偉,等.基于一種改進(jìn)的一維卷積神經(jīng)網(wǎng)絡(luò)電機(jī)故障診斷方法[J].北京理工大學(xué)學(xué)報(bào),2020,40(10):1088-1093.
MA Liling,LIU Xiaoran,SHEN Wei,et al.Motor fault diagnosis method based on an improved one-dimensional convolutional neural network[J].Transactions of Beijing Institute of Technology,2020,40(10):1088-1093.
[15]丁石川,厲雪衣,杭俊,等.深度學(xué)習(xí)理論及其在電機(jī)故障診斷中的研究現(xiàn)狀與展望[J].電力系統(tǒng)保護(hù)與控制,2020,48(8):172-187.
DING Shichuan,LI Xueyi,HANG Jun,et al.Deep learning theory and its application to fault diagnosis of an electric machine[J].Power System Protection and Control,2020,48(8):172-187.
[16]付朝陽(yáng),劉景林,張曉旭.雙余度永磁無(wú)刷直流電機(jī)匝間短路故障診斷[J].電工技術(shù)學(xué)報(bào),2014,29(1):104-109.
FUZhaoyang,LIU Jinglin,ZHANG Xiaoxu.Research on inter-turn short circuit fault diagnosis of dual redundancy permanent magnet brushless DC motor[J].Transactions of China Electrotechnical Society,2014,29(1):104-109.
[17]陳勇,梁洪,王成棟,等.基于改進(jìn)小波包變換和信號(hào)融合的永磁同步電機(jī)匝間短路故障檢測(cè)[J].電工技術(shù)學(xué)報(bào),2020,35(sup1):228-234.
CHEN Yong,LIANG Hong,WANG Chengdong,et al.Detection of stator inter-turn short-circuit fault in PMSM based on improved wavelet packet transform and signal fusion[J].Transactions of China Electrotechnical Society,2020,35(sup1):228-234.
[18]丁石川,王清明,杭俊,等.計(jì)及模型預(yù)測(cè)控制的永磁同步電機(jī)匝間短路故障診斷[J].中國(guó)電機(jī)工程學(xué)報(bào),2019,39(12):3697-3708.
DING Shichuan,WANG Qingming,HANG Jun,et al.Inter-turn fault diagnosis of permanent magnet synchronous machine considering model predictive control[J].Proceedings of the CSEE,2019,39(12):3697-3708.
[19]HE KM,ZHANG X Y,REN S Q,et al.Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Las Vegas:IEEE,2016:770-778.
[20]HUANG G,LIU Z,VAN DER MAATEN L,et al.Densely connected convolutional networks[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Honolulu:IEEE,2017:2261-2269.
