帶死區的PTZ攝像頭模糊PID跟蹤方法研究
2021-07-26 03:12:36梅權杰吳功平殷慶斌
機械設計與制造 2021年7期
梅權杰,吳功平,付 博,殷慶斌
(1.武漢大學動力與機械學院,湖北 武漢 430072;2.國網吉林省電力有限公司白山供電公司,吉林 白山 134300)
1 引言
機器視覺捕獲圖像信息是機器人判斷自身運動狀態,完成巡檢任務目標解析的主要方法。其中主動視覺是對移動目標實時跟蹤技術中的一個重要研究方向,使得安裝于固定位置的攝像機能夠根據目標位置和方向信息進行鏡頭位姿調整。目前常用的主動視覺攝像機為PTZ(Pan/Tilt/Zoom)攝像機,其主要控制方法如下:文獻[1]采用KCF目標跟蹤方法并使用粒子濾波框架對目標進行狀態預測,基于跟蹤結果使用PID算法對PTZ攝像機進行協調控制;文獻[2]運用模糊控制方法對PTZ攝像機進行運動控制,在控制方向上采取優先控制策略,對比目標質心在視場中x和y兩個方向的位置偏差,使攝像機優先轉動至偏差大的方向以完成校準,而在轉速控制方面則通過設置速度比例系數來線性調節攝像頭轉速,最后通過波門面積對比設定閾值來確定縮放操作;文獻[3]對PTZ攝像機進行模型辨識和建立動態矩陣,通過仿真和試驗反復調整控制參數對PTZ攝像機實現主動控制以實現視覺目標跟蹤,但對模型的匹配度要求較高;文獻[4]采用P控制器控制PTZ攝像頭實現目標跟蹤,并且通過增加比例項減少持續跟蹤過程中跟蹤誤差引起的劇烈振蕩;文獻[5]綜合計算位置偏差和誤差積累,采用PI控制器控制攝像頭跟蹤目標。
在機器人跟蹤目標過程中,搭載在移動機器人平臺上的PTZ攝像機通過定位目標位置來觀察不同場景中的細節,且利用主動視覺來觀察目標物。但是,跟蹤中圖像的穩定性和振蕩性會影響跟蹤目標的精度。以高壓輸電線路巡檢機器人[6]巡檢作業為研究對象,基于巡檢機器人搭建的主動目標跟蹤平臺,提出運用帶死區的模糊PID控制方法,對架空高壓輸電線桿塔的金具作為目標物進行跟蹤。實驗結果表明,此算法能夠實現基于PTZ攝像機的主動視覺跟蹤,較好的控制采集圖像的穩定性,降低圖像振蕩。
2 PTZ攝像機目標跟蹤平臺
2.1 機器人平臺與工作環境介紹
以工作在高塔架空地線上的巡檢機器人搭建PTZ攝像機主動視覺目標跟蹤平臺。機器人結構包括兩套安裝在同一水平導軌上的機械臂和一套收展臂機構,其中機械臂是由行走輪機構、壓緊輪機構和松鎖臂機構共同組成的輪臂復合式結構。兩臺SONY SNC-WR630系列高清PTZ網絡攝像機對稱安裝在機器人控制箱兩側。機器人行走輪安裝了軸后編碼器,壓緊輪安裝了霍爾傳感器,機箱內置傾角傳感器,三者輔助機器人完成自動運行。巡檢機器人外觀,如圖1所示。

圖1 機器人結構圖Fig.1 The Robot Structure
機器人在高壓輸電線上的運行過程包括直線段運行和越障,其中越障根據障礙物類型分為越金具和越塔,金具為防震錘,越塔根據塔型分為“越直線塔”和“越耐張塔”兩種。機器人通過對不同機構的組合動作實現“滾動越障”和“蠕動越障”。
(1)“滾動越障”即為雙臂壓緊輪松開,滾動越過障礙物;
(2)“蠕動越障”即為在一只機械臂行走輪保持制動狀態并且壓緊輪保持壓緊狀態下,另外一只機械臂通過壓緊輪松開,行走輪配合收展臂機構向內或向外實現單臂越過障礙物。
機器人巡檢作業任務即為在直線段行駛過程中拍攝桿塔金具,具體包括防震錘、絕緣子串、船型線夾和拉線金具等,均可作為主動跟蹤對象。
2.2 機器人自主定位方法
為便于機器人越過塔頭,對直線塔和耐張塔分別采用了C型掛板和耐張過橋的改造結構[7],而機器人通過機械結構和傳感器融合定位方法完成自主定位[8]為主動視覺控制提供了必要條件,定位方法,如圖2所示。

圖2 機器人自主定位方法Fig.2 Automatic Location Method of Robot
機器人由耐張桿塔運動至直線桿塔,以耐張過橋中點為原點建立桿塔坐標系{A},同時建立機器人坐標系{B},在任意位置,可通過行走輪編碼器、壓緊輪霍爾傳感器和傾角傳感器記錄并求解出機器人相對坐標原點OA的位置偏移量ΔyB、ΔzB和由桿塔轉角引起的角度偏移量α,則通過坐標分解即可得到機器人坐標系原點OB相對坐標系{A}的空間坐標ApBo,如式(1)所示。

3 目標跟蹤模型與方法
3.1 跟蹤控制量求解
建立機器人運動過程中需要跟蹤的目標信息數據庫,并建立攝像機坐標系{C},如圖3所示。圖中φ為攝像機安裝角,ΔxC、ΔyC分別為坐標系{C}在x和y方向上的偏移,機器人可基于定位信息計算出目標物在PTZ攝像機坐標系{C}中的坐標,進一步轉化為控制量。

圖3 攝像機坐標系分解圖Fig.3 The Decomposition Diagram of Camera Coordinate System
在巡檢過程中,設t=t0時刻機器人已完全越過防震錘,開始目標跟蹤位置為D,機器人自D點開始跟蹤目標。設時間間隔δ,在時間tn=t0+nδ(n=1,2,...,N)時,機器人到達Dn點,由定位算法得到機器人在沿導線豎直平面的y和z兩個方向的定位距離為Ay(tn)和Az(tn),同時通過傾角傳感器測得沿導線方向的傾角為θ(tn),則對于在坐標系{A}中坐標為Ap=(Ax0,Ay0,Az0)的目標,其在攝像機坐標系{C}中的坐標可通過如下坐標轉換關系求得:

式中:xB、yB、zB—坐標系{B}的坐標軸。通過控制攝像機的兩個方位使其視軸對準目標物,由圖3 可得對于目標物Cp=(Cx0,Cy0,Cz0),在攝像機坐標系{C}中的位置分解,如圖4所示。
由分解圖可得控制量Pan和Tilt分別如下:

式中:pan0—攝像機Pan方向初始角度;tilt0—Tilt方向初始角度。則在連續跟蹤時間內,形成了攝像機位置跟蹤曲線t-pan、t-tilt。
3.2 PTZ攝像機控制方法
PTZ攝像機在主動跟蹤目標時需要根據目標位置調整自身鏡頭位姿。使用的PTZ攝像機提供了基于C++的CGI(Command Get/Inquiry)命令控制方式,主要包括以下三種:(1)絕對位置控制:Pan、Tilt,速度(Pan和Tilt均為四位16進制數);(2)方向速度控制:方向,速度(對Pan,方向為right/left;對Tilt,方向為up/down);(3)位置反饋:Inqury=Pan,Tilt,Zoom。
對攝像機在Pan方向和Tilt方向的速度控制等級進行參數標定,結果如圖5、圖6所示。由圖5和圖6可知,雖然攝像機的調速范圍較寬,且呈非均勻分布,但實際速度控制量只能取有限的等級,低速區域適合減弱旋轉運動模糊;高速區域適合快速到達跟蹤曲線的起始點以及波動較大的點。

圖5 Pan等級Fig.5 Pan Level

圖6 Tilt等級Fig.6 Tilt Level
4 帶死區的模糊PID控制方法
在實際目標跟蹤問題中,考慮到目標位置不斷變化和PTZ攝像機速度控制等級的非均勻分布的特點,為了能夠穩定有效地跟蹤巡檢目標,采用帶死區的模糊PID控制方法動態調節PID參數,該模型包含模糊控制器和PID控制器,其結構,如圖7所示。

圖7 模糊PID控制器設計Fig.7 The Design of Fuzzy PID Controller
4.1 模糊控制器結構
由自主定位目標跟蹤算法得到的PTZ攝像機目標位置為給定信號,實際反饋位置為輸出信號,對pan和tilt兩個方向均選取角度偏差e和偏差變化率ec構成輸入語言變量,選取PID 的ΔKp、ΔKi、ΔKd增益控制量構成輸出語言變量。
4.1.1 變量模糊化
通過實驗確定輸入和輸出的基本論域,根據量化因子和比例因子分別將輸入和輸出轉化到論域,如式(4)所示。

定義輸入和輸出論域模糊量語言值均為e、ec、ΔKp、ΔKi、ΔKd={NB、NM、NS、ZE、PM、PS、PB},隸屬度函數,如圖8所示。

圖8 隸屬度函數Fig.8 The Subordinating Degree Function
4.1.2 模糊推理及去模糊化
模糊推理是模糊控制器的核心,能根據模糊邏輯中的蘊涵關系及推理規則從輸入模糊量推導出輸出模糊量。通過實驗經驗總結出推理規則,如表1所示。采用“重心法[9-10]”將輸出模糊量去模糊化,再經過輸出比例因子的尺度變換得到最終的實際輸出ΔKp、ΔKi、ΔKd,如式(5)所示。

式中:fij=ui(e)·uj(ec);ui(e)—e的隸屬度;uj(ec)—ec的隸屬度;Ku—比例因子;uij的值由模糊規,如表1所示。

表1 模糊PID推理規則表Tab.1 The Rules of Fuzzy Control
4.2 帶死區的PID控制器結構
采用離散位置式PID[11]控制方法,控制量計算,如式(6)所示。

式中:Kp、Ki、Kd—由模糊控制器在線整定所得,如式(7)所示。
式中:Kp0=0.5、Ki0=0.2、Kd0=0.2—PID初始整定值;對于由模糊控制修正后計算求得的u(k),根據其值的大小和正負按照2.1中速度等級測算結果轉化為實際控制等級和控制方向。
由于PTZ 攝像機控制等級數量有限,在誤差較小時,模糊PID控制器會解算選擇低控制等級,使攝像機在單位時間內轉動的角度大于該誤差,無法到達目標位置,易處于低等級方向頻繁切換狀態,導致巡檢畫面極不穩定,且會使攝像機自身產生機械磨損。因此,采用帶死區的PID[10],其控制算式,如式(8)所示。

即當計算誤差小于設定誤差時,令e(k)=0,則此時攝像機停止動作,式中e0可通過攝像機由實驗確定。
4.3 Zoom控制
針對PTZ攝像機Zoom控制中調整焦距倍率問題,可根據目標相對PTZ攝像機距離進行調整。
根據3.1中圖4可得目標相對PTZ攝像機視場中心距離,如式(9)所示。

文中使用的攝像機包括30級倍率,根據距離做出的調整策略,如表2所示。

表2 Zoom倍率調整策略Tab.2 The Adjustment Strategy of Zoom Ratio
5 實驗與驗證
基于VS2008和攝像機提供的API接口搭建攝像頭主動視覺目標跟蹤軟件平臺(CVS人機交互界面),通過該界面可得到主動視覺目標跟蹤圖像結果,如圖9所示。
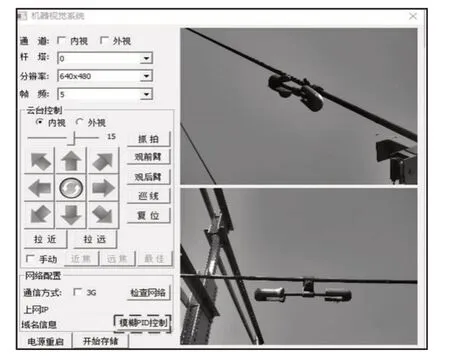
圖9 CVS人機交互界面Fig.9 CVS Man-Machine Interface
在搭建的模擬實驗平臺上通過機器人采集連續運行過程中的定位信息,并計算得到pan方向和tilt方向控制量跟蹤曲線,對攝像頭進行離線目標控制位置跟蹤試驗。現場照片,如圖10所示。

圖10 現場實驗Fig.10 The Field Experiment
實驗條件,如表3所示。

表3 實驗條件信息Tab.3 The Information of Experimental Condition
表3中位置反饋命令平均應答時間t1指從發出命令到接收到位置信息時間,速度控制命令應答時間t2指從發出命令到攝像機開始動作時間,t1和t2由實際測試過程多組值取平均值所得。考慮到圖像分辨率越大會影響圖像傳輸速率,在不影響圖片質量的前提下選擇圖像分辨率為(640×480)。
由于PTZ攝像機視場較寬,短距離內的巡檢無法檢驗其跟蹤能力,因此設定機器人在越過直線塔防震錘后行走15m直線段過程中對防震錘進行動態跟蹤,此過程中定位坐標采樣時間T=200ms,測試其跟蹤效果。實驗過程包括使用Fuzzy PID帶死區和不帶死區的Fuzzy PID的兩種方法進行跟蹤實驗,試驗過程中記錄目標位置變化曲線、攝像機實際跟蹤曲線和速度控制等級變化曲線,主要對比目標跟蹤的連續性和穩定。
由圖11~圖14可以看出:(1)在模糊PID控制中,對比帶死區和不帶死區兩種控制結果:從跟蹤曲線可以看出,當攝像機反饋角度位置與給定目標位置偏差較小時,在Pan方向和Tilt方向上攝像機控制等級均處于等級1,對于設置死區的控制器,當位置誤差進入死區后,計算得到控制等級為0,攝像機接收Move=stop,motor命令,保持當前位置狀態不變,可有效地減少由于無死區的控制動作過于頻繁帶來的圖像晃動和機械震動。(2)如圖11 所示,Pan方向目標位置角度在逐漸增加,當保持當前位置狀態一段時間后,偏差會逐漸增加,最終脫離死區,控制等級如圖12所示發生突變,因此將目標跟蹤過程中拍攝圖片時間選定在死區范圍內,以避免旋轉運動模糊對圖像的影響。(3)Pan方向角度范圍變化相對于Tilt方向寬,對視角整體影響較大,而Tilt方向趨于平穩,死區在對Tilt方向上的控制影響更為明顯。

圖11 Pan方向Fuzzy PID控制跟蹤曲線Fig.11 Fuzzy PID Control Tracking Curve of Pan Direction
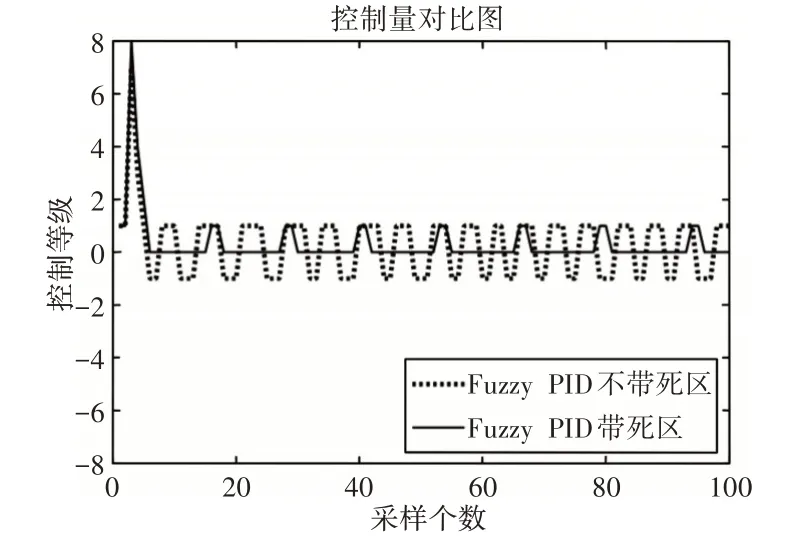
圖12 Pan方向Fuzzy PID控制等級曲線Fig.12 Fuzzy PID Control Grade Curve of Pan Direction

圖13 Tilt方向Fuzzy PID控制跟蹤曲線Fig.13 Fuzzy PID Control Tracking Curve of Tilt Direction

圖14 Tilt方向Fuzzy PID控制等級曲線Fig.14 Fuzzy PID Control Grade Curve of Tilt Direction
6 結論
機器人在通過PTZ攝像機主動跟蹤目標過程中根據目標位置不斷調整姿態,但由于目標位置隨時發生變化和攝像機控制精度有限等問題導致視場不穩定和振蕩,文中提出了一種帶死區的模糊PID控制方法,基于架空高壓輸電線巡檢機器人搭建PTZ攝像頭主動視覺跟蹤平臺,對桿塔目標物進行主動跟蹤。實驗表明該方法可以有效降低視場頻繁振蕩,滿足目標跟蹤需求。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
