實(shí)時(shí)渲染下的高精度高校動(dòng)線模擬研究
2021-07-28 08:31:37周慶偉
現(xiàn)代信息科技 2021年2期


摘? 要:高校的人流與車流在運(yùn)行過(guò)程中呈現(xiàn)出規(guī)律性的交通動(dòng)線,表現(xiàn)出間歇性、流量大、規(guī)律化的特點(diǎn)。因此可以通過(guò)建模還原環(huán)境,進(jìn)行高精度的校園交通動(dòng)線實(shí)時(shí)渲染,以實(shí)現(xiàn)其模擬。研究中,建立了虛擬校園動(dòng)線模擬系統(tǒng),以輔助管理者實(shí)施動(dòng)線控制與管理。三維環(huán)境細(xì)節(jié)的還原度越高,動(dòng)線模擬的可靠性越高,因此三維網(wǎng)格精度的提升與優(yōu)化至關(guān)重要。此外,動(dòng)線單元的AI設(shè)計(jì)、碰撞體精度計(jì)算、LOD優(yōu)化均影響動(dòng)線模擬的有效性。
關(guān)鍵詞:校園動(dòng)線系統(tǒng);實(shí)時(shí)模擬;多邊形優(yōu)化;AI設(shè)計(jì);LOD
中圖分類號(hào):TP391.9? ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2096-4706(2021)02-0085-05
Abstract:The flow of people and vehicles in universities present regular traffic dynamic line in the process of travelling,showing intermittent,large flow and regular characteristics. Therefore,it is possible to restore the environment by modeling for high-precision and real-time rendering of campus traffic dynamic line to achieve its simulation. In the research,a virtual campus dynamic line simulation system is established to help managers implement the dynamic line control and management. The higher the detail restoration degree of 3D environment is,the higher the reliability of dynamic line simulation is. So that it is very important that the improvement and optimization of 3D mesh accuracy. In addition,AI design of dynamic line unit,collision body precision calculation and LOD optimization all affect the effectiveness of dynamic line simulation.
Keywords:campus dynamic line system;real-time simulation;polygon optimization;AI design;LOD
0? 引? 言
學(xué)校特別是高校,作為城市重要的公共服務(wù)設(shè)施,具有占地面積大、人流集散頻繁的特點(diǎn),其承載的教育服務(wù)功能、社會(huì)交流功能、應(yīng)急避難功能等都需要科學(xué)合理的動(dòng)線設(shè)計(jì)與管理做保障。而學(xué)校使用群體(學(xué)生、教師、管理者)作為校園活動(dòng)中的主要人群,其人流動(dòng)線的設(shè)計(jì)與管理具有間歇性、規(guī)律性、流量大的特點(diǎn)。傳統(tǒng)的動(dòng)線規(guī)劃與設(shè)計(jì)借助圖形、文字、數(shù)據(jù)等靜態(tài)表現(xiàn)形式來(lái)完成,不能很好地對(duì)動(dòng)線進(jìn)行動(dòng)態(tài)的預(yù)測(cè)與管理。
對(duì)動(dòng)線的設(shè)計(jì)效果進(jìn)行及時(shí)的驗(yàn)證能夠提高動(dòng)線設(shè)計(jì)與管理的效率,利用計(jì)算機(jī)GPU圖形渲染技術(shù),實(shí)現(xiàn)校園動(dòng)線的三維實(shí)時(shí)渲染及模擬,可以快速、直觀且真實(shí)地展示動(dòng)線規(guī)劃與設(shè)計(jì)的實(shí)際效果,并能夠及時(shí)做出針對(duì)性調(diào)整。建立校園虛擬仿真系統(tǒng)是實(shí)現(xiàn)動(dòng)線模擬的有效方法,一般需要應(yīng)用VR相關(guān)技術(shù)、實(shí)時(shí)渲染技術(shù)、AI自適應(yīng)學(xué)習(xí)技術(shù)等,利用高性能GPU圖形加速,實(shí)現(xiàn)真實(shí)的校園模擬[1],這便能有效且逼真地對(duì)高校的交通動(dòng)線進(jìn)行實(shí)時(shí)計(jì)算、模擬還原。僅通過(guò)參數(shù)化的配置,便能快速地檢驗(yàn)動(dòng)線設(shè)計(jì)與管理策略是否合理,發(fā)現(xiàn)不足與可優(yōu)化節(jié)點(diǎn),做到提前預(yù)判,增強(qiáng)校園動(dòng)線管理的可控性。
1? 虛擬校園動(dòng)線模擬系統(tǒng)設(shè)計(jì)與實(shí)踐
針對(duì)校園動(dòng)線模擬需求,研究中對(duì)實(shí)際校園進(jìn)行了數(shù)字還原,并設(shè)計(jì)虛擬校園動(dòng)線模擬系統(tǒng)。該系統(tǒng)包括以下功能:
(1)校園交通流線的還原,通過(guò)三維還原,能夠?qū)崟r(shí)瀏覽并掌握校園交通流線空間(包括建筑空間、車行交通空間、戶外人行空間,校外輻射交通空間)的原貌,并使之成為完整的模型整體。
(2)具備完整可交互VR顯示模塊,可以橋接HTC VIVE、OCULUS等主流PC端VR設(shè)備,以第一人稱視角更直觀地觀察校園動(dòng)線模擬情況,同時(shí)實(shí)現(xiàn)校園720°全景圖像的實(shí)時(shí)演示。
(3)校園動(dòng)線參數(shù)化設(shè)置,可以通過(guò)輸入或者修改校園內(nèi)人流和車流的速度、數(shù)量、方向等參數(shù)來(lái)得出不同的動(dòng)線模擬結(jié)果,以提高分析動(dòng)線設(shè)計(jì)的可靠性。
系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)需要根據(jù)校園的具體情況來(lái)進(jìn)行,包括實(shí)際調(diào)研、校園動(dòng)線場(chǎng)景設(shè)計(jì)與繪制、功能模塊驗(yàn)證等。表1為某校園部分人流動(dòng)線數(shù)據(jù)調(diào)研,圖1為系統(tǒng)設(shè)計(jì)與實(shí)踐流程。
2? 基于UE4的GPU高精度浮點(diǎn)調(diào)度與交互實(shí)現(xiàn)
校園動(dòng)線模擬系統(tǒng)在GI條件下運(yùn)行,需要同時(shí)計(jì)算1T flops以上的場(chǎng)景多邊形,同時(shí)需要對(duì)所有可活動(dòng)的模型進(jìn)行浮點(diǎn)運(yùn)算,因此必須調(diào)用GPU進(jìn)行動(dòng)線模擬。研究中應(yīng)用了當(dāng)前較為主流的實(shí)時(shí)渲染引擎UE4[2],其物理模擬效果十分強(qiáng)大,作為3A級(jí)商業(yè)引擎,其對(duì)GPU的高效調(diào)度,能夠準(zhǔn)確地計(jì)算并逼真地模擬各種物理環(huán)境效果。廣泛應(yīng)用于建筑仿真、3A游戲、海洋模擬等領(lǐng)域。
2.1? 虛擬校園在實(shí)時(shí)擬真渲染下的還原
以三維建模的方式實(shí)現(xiàn)宏觀模型場(chǎng)景還原,使用CAD對(duì)調(diào)研數(shù)據(jù)進(jìn)行高精度的矢量繪制,再使用3ds Max進(jìn)行高精度場(chǎng)景還原,最后在UE4引擎中準(zhǔn)確地進(jìn)行實(shí)時(shí)運(yùn)算。值得注意的是,這里的高精度指的是交通橫向和縱向的準(zhǔn)確性,包括道路的寬度、坡度、超高等信息,而非整體畫面的真實(shí)性,如道路局部沉降、路邊的小品裝飾等不規(guī)則空間的還原就比較困難了。圖2為虛擬校園的三維還原流程。
2.2? GPU加速實(shí)現(xiàn)高精度碰撞體設(shè)計(jì)
動(dòng)線的活動(dòng)單位為人流或者車流,即動(dòng)線單元,每個(gè)動(dòng)線單元都要為其設(shè)計(jì)行動(dòng)AI,并在規(guī)定的范圍內(nèi)活動(dòng)。這就要求在動(dòng)線范圍內(nèi)的所有物體都具備碰撞屬性。基于UE4物理引擎下的Collsion碰撞屬性包括兩種實(shí)現(xiàn)方式,即boxCollsion和meshCollsion。圖3為Collsion模式示意,填充范圍為碰撞體范圍,前者的精度明顯低于后者,而meshCollsion需要更高的浮點(diǎn)算力。圖4為碰撞體設(shè)置工作流程。選擇meshCollsion模式進(jìn)行GPU調(diào)度模擬,能夠更精確地進(jìn)行多邊形碰撞。
2.3? 動(dòng)線活動(dòng)單元AI設(shè)置
校園模型空間對(duì)象包括兩類,靜態(tài)網(wǎng)格物體和動(dòng)態(tài)網(wǎng)格物體,其中動(dòng)態(tài)活動(dòng)單元應(yīng)當(dāng)以動(dòng)態(tài)網(wǎng)格物體呈現(xiàn),其頂點(diǎn)、三維坐標(biāo)、UVW都是可以給予條件并修改的,在UE4中的單元屬性為Actor類中的staticmesh。AI單元的設(shè)計(jì)步驟為:
(1)設(shè)置AI活動(dòng)范圍,根據(jù)動(dòng)線規(guī)定,鎖定環(huán)境場(chǎng)所編碼為meshCollsion,圖5為meshCollsion設(shè)置示例。
(2)根據(jù)動(dòng)線規(guī)劃設(shè)計(jì)AI基本功能,包括定時(shí)游走、觸碰減速、擁堵自動(dòng)重新尋路等,使用UE4的Cube和Sphere對(duì)模擬對(duì)象進(jìn)行動(dòng)線模擬實(shí)驗(yàn),再通過(guò)繼承Actor繼承人、車實(shí)體模型。圖6為動(dòng)線AI行為需求樹(shù)。
在實(shí)際模擬中,人行容易產(chǎn)生多次物理碰撞,需要重新編寫動(dòng)態(tài)碰撞交互邏輯,以提高運(yùn)行效率,防止計(jì)算溢出。同時(shí)UE4的AI行為樹(shù)計(jì)算對(duì)CPU消耗巨大,在編碼過(guò)程中應(yīng)當(dāng)調(diào)用GPU對(duì)動(dòng)線單元的頂點(diǎn)、向量進(jìn)行輔助計(jì)算,以提高運(yùn)行效率。圖7為動(dòng)線模擬實(shí)驗(yàn)實(shí)機(jī)演示。
動(dòng)態(tài)碰撞交互邏輯主要代碼為:
EBTNodeResult::Block UBTTask_Wait::ExecuteTask(UBehaviorTreeComponent* AIPawn, uint8* Reference) const
{
UBehaviorTreeComponent* AiRef = AIPawn;
AAIController* AiPawnContoraller = AiRef ? Cast
if (AiPawnContoraller == NULL)
{
return EBTNodeResult::Failed;
}
else
{
AAIController->SetAIState(AiRef,EAiPawnState::Wait);
return EBTNodeResult::Succeeded;
}
return EBTNodeResult::Failed;
}
3? 實(shí)時(shí)模擬的運(yùn)行效率優(yōu)化
動(dòng)線模擬的重點(diǎn)在于計(jì)算機(jī)運(yùn)行圖形單位(動(dòng)態(tài)網(wǎng)格物體)的物理碰撞效果是否合理,而校園環(huán)境空間(靜態(tài)網(wǎng)格物體)的多邊形還原至關(guān)重要。傳統(tǒng)的三維建模手段很難還原微觀細(xì)節(jié),這是由于3ds Max、Maya等工具的建模方式需要人工創(chuàng)造細(xì)節(jié),對(duì)于校園這樣的大空間,很難保障三維模型的細(xì)節(jié)深度,同時(shí)高精度的模型會(huì)影響實(shí)時(shí)運(yùn)算的效率。從上述虛擬系統(tǒng)的功能需求角度分析,可以從以下幾個(gè)方面進(jìn)行優(yōu)化。
3.1? 多邊形LOD實(shí)時(shí)渲染層級(jí)優(yōu)化
LOD即動(dòng)態(tài)層次細(xì)節(jié),通過(guò)多層級(jí)細(xì)節(jié)進(jìn)行模型的動(dòng)態(tài)顯示。UE4具備自適應(yīng)LOD生成,其基本思路是重構(gòu)模型的三角面,但模型面重構(gòu)容易引起模型紋理UVW的變化,導(dǎo)致紋理錯(cuò)亂[3]。同時(shí)自適應(yīng)LOD的模型的貼圖和多邊形層級(jí)優(yōu)化不可控,會(huì)出現(xiàn)貼圖質(zhì)量大幅度降低的同時(shí),而多邊形數(shù)量不變的情況。因此除了使用自適應(yīng)LOD生成以外,手工制作高、低模型,再進(jìn)行LOD配置處理的過(guò)程也是必不可少的。
在UE4實(shí)時(shí)運(yùn)算中,一個(gè)頂點(diǎn)和一個(gè)面對(duì)物體的碰撞效果是差別不大的,因?yàn)榕鲎埠髮?duì)動(dòng)線方向改變不是由力學(xué)模擬影響,而是根據(jù)AI預(yù)設(shè)的值來(lái)確定的。因此減少在同一個(gè)象限中的頂點(diǎn)刪減可以使對(duì)最終模擬效果的影響降到最低。因此可以運(yùn)用半邊折疊的LOD三維模型簡(jiǎn)化算法[4]進(jìn)行快速減面。
圖8為半邊折疊多邊形示例,折疊邊bC將c點(diǎn)移動(dòng)到a點(diǎn)的位置,折疊邊aB將b點(diǎn)移動(dòng)到a點(diǎn)的位置,這樣便形成了新的頂點(diǎn)a。多邊形數(shù)量減少,但是頂點(diǎn)碰撞象限高度不變。
通過(guò)手動(dòng)修模將模型分級(jí)為L(zhǎng)0、L1、L2、L3四個(gè)等級(jí),L0表示模型精度最高,L3表示模型精度最低。表2為各層級(jí)模型深度。
動(dòng)線的有效數(shù)據(jù)模擬一般在近景處,因此應(yīng)當(dāng)對(duì)近景設(shè)置高精度模型顯示,動(dòng)線單元也需要為高精度顯示,保持恒定的最佳LOD顯示效果。
3.2? 位圖掃描多邊形優(yōu)化
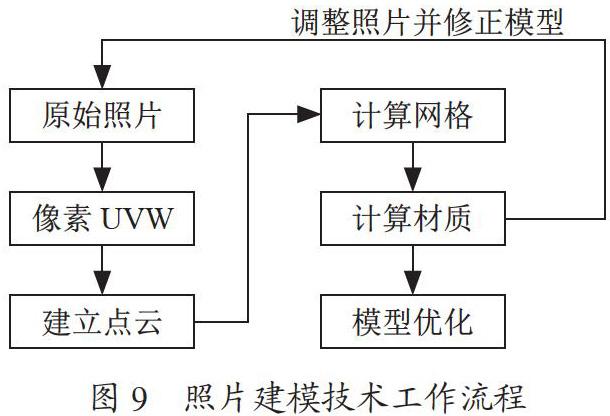
前文提到3ds Max可以進(jìn)行高精度建模,可以對(duì)動(dòng)線的規(guī)則空間進(jìn)行精確還原。但是對(duì)于不規(guī)則的細(xì)節(jié)模型,如人行地面的沉降、路邊可能影響人行通過(guò)的景觀、植被姿態(tài)等,完全還原非常困難。強(qiáng)行3ds Max建模會(huì)使多邊形數(shù)量大幅增長(zhǎng),嚴(yán)重影響動(dòng)線的實(shí)時(shí)模擬效率。為了更加精確地還原這些細(xì)節(jié),并保證高效的運(yùn)行效率,部分小體量和不規(guī)則模型可以采用Agisoft Photoscan照片建模技術(shù)實(shí)現(xiàn)模型構(gòu)建[5]。照片建模技術(shù)是利用光學(xué)掃描的方式,對(duì)目標(biāo)物體進(jìn)行像素點(diǎn)三維坐標(biāo)捕捉,并將其反饋到紋理的UVW上,因此可以完整地保留模型細(xì)節(jié)。圖9為照片建模技術(shù)工作流程。
通過(guò)照片建模獲得的原始模型其多邊形數(shù)量非常龐大,同樣需要手動(dòng)優(yōu)化。采用半邊折疊的方式減少多邊形數(shù)量,并重新進(jìn)行烘焙,能夠盡量保留模型的細(xì)節(jié)信息。
3.3? 全局光照烘焙
本研究使用的GPU支持最新的NVIDIA光線追蹤技術(shù),光線追蹤技術(shù)是全局光照技術(shù)的一種,可以模擬真實(shí)世界的光線分布與反射、折射規(guī)則[6]。UE4可以調(diào)用實(shí)時(shí)全局光照接口,實(shí)現(xiàn)逼真的光影效果。但是在實(shí)時(shí)運(yùn)行過(guò)程中,全局光照將耗費(fèi)巨大的計(jì)算機(jī)算力,不僅對(duì)GPU造成壓力,而且CPU和內(nèi)存的消耗都會(huì)增加。
光照效果并不會(huì)影響動(dòng)線模擬的精度,但是為了最大限度地提升演示效果,可以利用NVIDIA光線追蹤技術(shù)實(shí)現(xiàn)場(chǎng)景的最佳光照效果,再對(duì)場(chǎng)景進(jìn)行烘焙,將全局光照的實(shí)時(shí)渲染效果轉(zhuǎn)化為著色信息。這樣既能保持較好的畫面效果,又能保證動(dòng)線模擬所需要的高精度模型計(jì)算。
4? 校園動(dòng)線模擬實(shí)證
實(shí)踐證明,基于建立的校園動(dòng)線模擬系統(tǒng)對(duì)動(dòng)線的模擬是可行的。本研究對(duì)實(shí)際調(diào)研的動(dòng)線情況進(jìn)行了模擬。研究中對(duì)基本的數(shù)據(jù)要素進(jìn)行載入,包括且不限于時(shí)間、事件、地點(diǎn)、流量。圖10為校園動(dòng)線模擬實(shí)機(jī)運(yùn)行效果。
通過(guò)模擬可以得出,基于上述方法建立的動(dòng)線模擬系統(tǒng)運(yùn)行良好,對(duì)實(shí)際調(diào)研的人流和車流動(dòng)線模擬還原度較高。例如表3為一次下課人流模擬情況。
5? 結(jié)? 論
計(jì)算機(jī)實(shí)時(shí)模擬校園動(dòng)線是可行的。三維模型可以更準(zhǔn)確地模擬真實(shí)的物理動(dòng)態(tài)效果,保證動(dòng)線模擬的可靠性,這得益于GPU加速下的高精度多邊形的實(shí)時(shí)渲染效果。但是,在實(shí)際應(yīng)用中需要注意下文所述的五個(gè)要點(diǎn):
(1)動(dòng)線模擬系統(tǒng)需要根據(jù)具體校園的空間復(fù)雜程度、動(dòng)線運(yùn)行情況進(jìn)行單獨(dú)優(yōu)化,校園流量較大的情況下需要反復(fù)調(diào)整動(dòng)線單元的多邊形,以保證運(yùn)行速度。
(2)動(dòng)線模擬系統(tǒng)必須在60 FPS以上的狀態(tài)運(yùn)行,以免出現(xiàn)卡頓而導(dǎo)致的動(dòng)線流量誤差。
(3)需要針對(duì)不同的動(dòng)線事件,單獨(dú)設(shè)置動(dòng)線運(yùn)行的關(guān)卡。
(4)動(dòng)線模擬過(guò)程中應(yīng)盡量采用多種多邊形物體進(jìn)行動(dòng)線模擬實(shí)驗(yàn),再進(jìn)行真實(shí)比例的人體和車體的動(dòng)線單元繼承Actor。
(5)需要根據(jù)校園的實(shí)際情況,不斷去修正和更新動(dòng)線模擬系統(tǒng)。
參考文獻(xiàn):
[1] 劉菲菲.基于幾何建模技術(shù)創(chuàng)建虛擬校園漫游系統(tǒng) [J].現(xiàn)代電子技術(shù),2019,42(13):127-130.
[2] 余肖翰,余麒祥.基于UE4引擎的海洋虛擬可視化初探 [J].應(yīng)用海洋學(xué)學(xué)報(bào),2017,36(2):295-301.
[3] 程良勇,李南江.網(wǎng)絡(luò)三維數(shù)字城市海量模型優(yōu)化算法研究 [J].測(cè)繪通報(bào),2019(7):104-108.
[4] 熊仕勇,李沁翰,謝愛(ài)榮.基于半邊折疊的LoD三維模型簡(jiǎn)化算法 [J].計(jì)算機(jī)工程與設(shè)計(jì),2016,37(3):655-659.
[5] 馬歡歡,趙清坡.Agisoft Photoscan照片建模技術(shù)在考古中的應(yīng)用 [J].文物保護(hù)與考古科學(xué),2016,28(4):144-149.
[6] 秦志強(qiáng),張文閣,蔣曉瑜,等.基于光線追蹤的實(shí)時(shí)可交互計(jì)算生成集成成像方法 [J].光子學(xué)報(bào),2019,48(9):99-107.
作者簡(jiǎn)介:周慶偉(1986.09—),男,漢族,四川自貢人,講師,畢業(yè)于西南科技大學(xué),碩士研究生,主要研究方向:虛擬旅游。