基于優化算法的移動機器人全局路徑規劃
2021-08-04 07:52:40何佳澤張壽明
化工自動化及儀表 2021年4期
何佳澤 張壽明
(昆明理工大學信息工程與自動化學院)
移動機器人同步定位與建圖(SLAM)中,需要規劃一條從起始點到終點的路徑,這個過程就被定義為全局路徑規劃[1,2]。傳統的A*算法是一種啟發式搜索算法, 它將整個地圖分成很多個節點,以評估節點的代價函數值來作為節點的綜合優先級[3],通過遍歷周邊的節點,選取最高優先級的節點, 逐漸找到一條從起點到終點的最優路徑。 傳統A*算法在二維柵格地圖中的路徑規劃效果比較好, 它能快速找到代價最小的函數值,從而得到線路最短的路徑。 但是,因為它需要遍歷周邊節點, 所以在尺寸較小的地圖中比較實用。隨著地圖尺寸的不斷擴大,它將會搜索大量的無用節點,使得搜索的節點數量以指數級增長[4]。
為了使A*算法在尺寸較大的地圖中也能使用,筆者提出將它與啟發神經網絡(GBNN)模型結合,并使用跳點搜索(JPS)算法跳過下一個無用節點,減少整體計算量,從而提高算法的性能。
1 算法原理
1.1 A*算法柵格地圖全局路徑規劃
A*算法采用代價函數,通過不斷尋找周圍的節點,分析其代價規劃出一條最優路徑[5],代價函數模型如下:

式中 F(n)——從起始狀態經由狀態n到目標狀態的代價;
G(n)——在狀態空間從起始狀態到狀態n的實際代價;
H(n)——從狀態n到目標狀態規劃的最佳路徑的代價。
A*算法是一種二維柵格地圖, 首先建立A*代價函數柵格地圖(圖1)。

圖1 A*代價函數柵格地圖
圖1建立的是5×5的柵格地圖,A*算法的基本原理是從起點開始遍歷周邊8個節點的代價函數值。 每一個柵格的長、寬都為10,根據對角線計算方法可知,柵格對角線距離為,近似為14;G(n)的值為起點到某一個柵格的最短距離[6,7]。筆者采用曼哈頓距離展開計算求得H(n):

其中10為柵格的寬度。
求出起點周圍8個相鄰節點的代價函數值F(n),并且方向是朝著終點,(3,3)節點的代價函數值最小[8],所以全局路徑規劃到(3,3),并且以此點為中心點, 計算周圍8個相鄰節點的代價函數值,選取下一個規劃路徑點,直到到達目標位置點為止[9],如圖2所示。

圖2 A*算法代價函數規劃路徑
圖2中,起點到第2個節點最小代價函數值為54,然后是48,再到終點是42,由此得到一條最優全局路徑規劃。
1.2 A*算法的優缺點
A*算法由于原理簡單,在實際生產中得到了廣泛的應用, 但是它的缺點也同樣非常明顯,如果地圖比較大的話,它將會遍歷很多點,計算量特別大,并且每一個點的計算量也非常大,所以對系統的運算能力要求較高[10]。 為了彌補這兩方面的不足,筆者使用JPS算法與GBNN模型結合的方法來克服這兩個方面的缺點。
2 跳點搜索法
為減少中間無效節點和一些效果比較差的節點,筆者采用跳點搜索規則對每個節點周圍的可拓展節點進行篩選,跳過不需要拓展的節點[11]。 這樣就可以減少大量的節點運算,提高整體性能,進而提高搜索效率[12]。
水平方向和對角線方向的篩選規則如圖3、4所示。

圖3 水平方向篩選規則
圖3、4中灰色點代表不適合經過X節點建立全局路徑規劃的點, 白色點代表適合經過X節點建立全局路徑規劃的點。 圖3中路徑從X22節點朝著X點向地圖的右邊運動, 可以直觀地看出從X22到Y最短的路線是走直線:X22→X→X42→Y,直接經過X的路徑是最短的,如果繞過X,那么將不是最優選擇;如果終點Y是節點X51或者X53,那么經過X節點就不是最優路徑選擇, 此時的規劃路徑將不經過X節點。 同理在圖4中X22節點朝著X方向向Y節點運行, 搜索過程則可以直接跳過X節點。所以筆者根據圖3所示的水平方向篩選規則分成a、b兩種情況來篩選拓撲點(圖4所用對角線方向篩選規則同理):
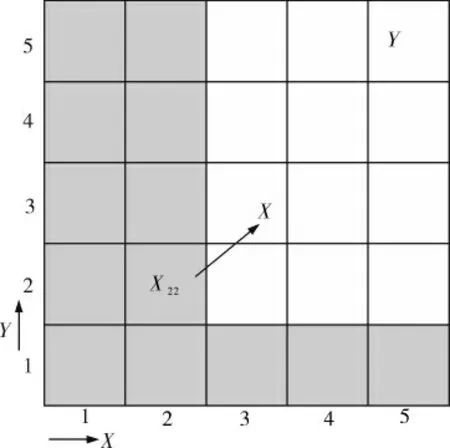
圖4 對角線方向篩選規則
a. 從X22節點向右側移動不經過X節點比經過X節點的路徑差的情況,如終點為X42或者X52;
b. 從X22節點向右側移動不經過X節點比經過X節點的路徑優的情況,如終點為X51或者X53。
情況a中X節點會加入到點集合中,情況b中X節點就會被去掉,這樣就可以去掉無效或者低效節點,減少節點處理量。
在沒有障礙物節點的環境中, 沿著X、Y方向的節點篩選規則為:

其中,m代表X可以拓展的相鄰節點,len()代表路徑行進長度;(X22,…,m|X)代表不通過X而直接到m的最短路徑;(X22,X,m)代表X節點到達m的最優路徑。
同理,可以得到在沒有障礙物節點的環境中對角線方向的篩選規則:

3 A*算法與GBNN模型優化
3.1 GBNN模型
GBNN模型是一種離散的生物啟發神經網絡,它不需要機器學習和深度學習。GBNN模型是三維立體神經網絡,主要用在水下機器人的路徑規劃中。 筆者通過簡化,構建了如圖5所示的二維神經網絡[13],與二維柵格地圖一一對應。

圖5 簡化的二維GBNN模型
該算法的主體思想是不斷向四周傳遞激勵,障礙物對發散出的激勵有抑制作用,通過迭代算法計算出每個位置的活性數值。 該算法有記憶特性,地圖上的每一個點都可以通過不斷迭代到達激勵的發出點,這個激勵的發出點也就是路徑規劃中的終點[14]。
GBNN數學模型如下:

其中,Wij是兩個神經元i、j之間的連接權值,xi是i神經元的活性輸出值,Ii是i神經元的外部激勵值,ωij是i、j兩個神經元之間的連接系數,函數g是模型變換函數,γ、r為常數,根據情況設置。筆者采用的是二維柵格地圖,所以式(7)使用的是GBNN二維模型的歐拉公式,xix、xiy分別表示第i個神經元的x、y坐標值,通過式(7)即可求出i、j神經元之間的距離。
3.2 A*算法與GBNN模型結合
GBNN的二維神經網絡結構可以與路徑規劃中的柵格地圖一一對應起來,每一個神經元和一個平面二維柵格對應,它依據二維柵格地圖中各個柵格的狀態來決定神經元的外部輸入。 通過直接計算神經元的活性值來規劃路徑,這樣就可以避免大量代價函數計算, 減少節點之間的運算量。 GBNN模型不需要神經網絡學習, 不需要訓練,可以滿足路徑規劃對實時性的要求。
4 實驗仿真
筆者提出在A*算法的基礎上使用跳點搜索,這樣去掉不需要的低效和無效節點,然后在此基礎上加入GBNN模型。 模型構建以后,通過MATLAB仿真方法比較算法優化前后的效果。
實驗配置如下:
硬件 CPU i7-8750H
內存 16GB
軟件 MATLAB2016a
首先建立50×50的柵格地圖, 規定起點和終點的位置,隨機生成障礙物坐標,通過比較算法優化前后的路徑規劃時間、路徑遍尋節點數量和全局規劃路徑長度這3個指標來比較。
圖6為優化算法流程。

圖6 優化算法流程
圖7、8分別顯示了50×50的二維柵格地圖未使用和使用筆者所提算法的規劃路徑,圖中綠色圈為起點,藍色圈為終點,規劃路徑為藍色曲線。圖9、10分別對應圖7、8的運行時間、遍歷節點數和路徑總長度。
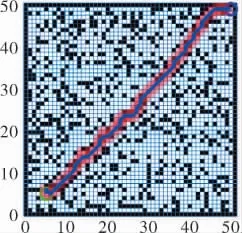
圖7 未使用優化算法規劃路徑

圖8 使用優化算法規劃路徑

圖9 未使用優化算法路徑規劃數據

圖10 使用優化算法路徑規劃數據
因為算法具有隨機性,為了使結果更具真實性,所以通過多次仿真實驗,比較算法優化前后的路徑規劃時間、路徑遍尋節點數量和全局規劃路徑長度的平均值,詳見表1。

表1 算法優化前后性能對比
通過表1可以看出優化后的算法對二維柵格地圖全局路徑規劃效果較好。
5 結束語
對傳統的A*算法進行優化, 加入JPS 和GBNN,將3種算法進行結合。 采用路徑規劃時間、路徑遍尋節點數量和全局規劃路徑長度這3個指標對算法的優劣性進行對比, 可以看出使用3種算法結合后的優化算法效果較好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16