基于智能計算的城軌列車節(jié)能優(yōu)化操縱研究
2021-08-08 01:20:10崔瑋辰高利民東春昭鄭景文
工程數(shù)學(xué)學(xué)報 2021年4期
關(guān)鍵詞:優(yōu)化
張 方, 崔瑋辰, 高利民, 東春昭, 鄭景文
(1-北京京城地鐵有限公司,北京 1 01300;2-北京交通大學(xué)電氣工程學(xué)院,北京 1 00044;3-中國鐵道科學(xué)研究院集團(tuán)有限公司,北京 1 00081)
1 引言
城市軌道交通已成為當(dāng)今社會城市居民主要出行方式,以北京市為例,2018年日均開行列車7092列,全年累計開行列車2588470列.但對于城軌列車的運(yùn)行控制,往往依據(jù)司機(jī)的個人經(jīng)驗,缺少相應(yīng)的運(yùn)行曲線作為指導(dǎo).因此,城軌列車的節(jié)能優(yōu)化操縱技術(shù)是一個亟待通過研究突破的核心問題.目前,城軌列車的節(jié)能優(yōu)化操縱研究多以位置信息作為決策變量,結(jié)合相關(guān)實際情況的約束來制定列車運(yùn)行節(jié)能計劃,求解較為復(fù)雜.謝小星等[1]以動力學(xué)方程為基礎(chǔ),在客運(yùn)量和調(diào)度時間的約束下,研究了列車不同限速工況下的區(qū)間運(yùn)行節(jié)能效果,分析了列車駕駛模式、區(qū)間運(yùn)行時間、牽引和制動與線路能耗的關(guān)系.賀德強(qiáng)等[2]綜合考慮由坡道、曲線組成的復(fù)雜線路,建立了限定時間、速度、加速度等約束條件下的最小能耗模型,引入粒子群算法設(shè)計了基于矩陣離散法的地鐵列車優(yōu)化操縱智能系統(tǒng).柏赟等[3]以列車凈能耗為目標(biāo)構(gòu)建了快慢車線路列車協(xié)同節(jié)能優(yōu)化操縱模型,設(shè)計了混合遺傳算法進(jìn)行求解.唐海川等[4]以牽引變電所處總能耗最小為目標(biāo),依據(jù)再生制動等效電路和牽引計算模型,獲得地鐵列車兩車追蹤運(yùn)行約束,采用二次規(guī)劃算法,優(yōu)化追蹤列車操縱序列,降低了系統(tǒng)總能耗.
基于上述城軌列車節(jié)能優(yōu)化思路,本文以城軌列車物理模型為基礎(chǔ),提出一種基于巡航速度和距離結(jié)合的非線性約束優(yōu)化方案,對某市城軌線路運(yùn)營列車進(jìn)行優(yōu)化操縱研究.將列車能耗作為優(yōu)化目標(biāo),運(yùn)行時間作為約束條件,巡航速度與巡航距離作為待優(yōu)化解,分別采用粒子群算法和遺傳算法搜尋滿足約束條件下的城軌列車最優(yōu)控制策略,優(yōu)化結(jié)果可為城軌列車運(yùn)營提供有效指導(dǎo).
本文內(nèi)容安排如下:第2節(jié),對城軌列車物理模型進(jìn)行分析,結(jié)合實際運(yùn)行情況構(gòu)建約束條件和目標(biāo)函數(shù);第3節(jié),基于粒子群算法對城軌列車進(jìn)行節(jié)能優(yōu)化設(shè)計;第4節(jié),基于遺傳算法對城軌列車進(jìn)行節(jié)能優(yōu)化設(shè)計;第5節(jié),給出本文結(jié)論.
2 城軌列車物理模型分析
2.1 城軌列車受力分析
城軌列車在行駛過程中的受力情況可以分為牽引力、制動力和阻力.牽引力作為列車前行的驅(qū)動力,其方向為列車的前進(jìn)方向,大小可由司機(jī)根據(jù)運(yùn)行要求進(jìn)行調(diào)節(jié).制動力與牽引力方向相反,大小同樣受運(yùn)行要求加以控制.阻力可以分為基本阻力與附加阻力,方向與前進(jìn)方向相反,大小由各類阻力因素而定.由于牽引力和制動力不同時存在,城軌列車的具體受力分析,如圖1所示.

圖1 城軌列車受力分析
根據(jù)TB/T 1407-1998列車牽引計算規(guī)程標(biāo)準(zhǔn),城軌列車受力計算方法如下:
1) 列車單位基本阻力

其中ω0為列車單位基本阻力,單位:N/kN;a,b,c為按城軌列車型號取值的系數(shù);v為列車運(yùn)行速度,單位:km/h.
2) 列車單位坡道附加阻力

其中ωi為列車單位坡道附加阻力,單位:N/kN;i單位:‰,上坡取正值,下坡取負(fù)值.
3) 列車單位曲線附加阻力

其中ωr為列車單位曲線附加阻力,單位:N/kN;R為曲線半徑,單位:m.
2.2 城軌列車計算參數(shù)取值
本文對某市城軌線路的實際運(yùn)行列車進(jìn)行節(jié)能優(yōu)化操縱分析,站點(diǎn)之間均采用兩階段巡航的運(yùn)行方式,以A站到B站為例,計算參數(shù)均以列車實際運(yùn)行數(shù)據(jù)取值,具體參數(shù)見表1所示.

表1 某市城軌線路A站到B站計算參數(shù)
2.3 城軌列車運(yùn)行約束條件分析
城軌列車通常采用兩段巡航的運(yùn)行方式,涉及牽引、巡航和制動三種運(yùn)行工況,典型的運(yùn)行操縱速度曲線,如圖2所示,圖中上方實線為列車限速值[5].

圖2 列車運(yùn)行速度曲線圖
本文將該運(yùn)行區(qū)間分為五個運(yùn)行過程,表示如下:
S1(m)為牽引距離,S2(m)為以速度v1巡航的距離,S3(m)為從速度v1(m/s)制動到v2(m/s)的距離,S4(m)為以速度v2(m/s)巡航的距離,S5(m)為從速度v2(m/s)制動到停車的距離.并將每個過程所用時間用t1~t5表示,結(jié)合該段運(yùn)行總時間T(s)和總距離S(m),可以得到間約束不等式和距離約束等式如下

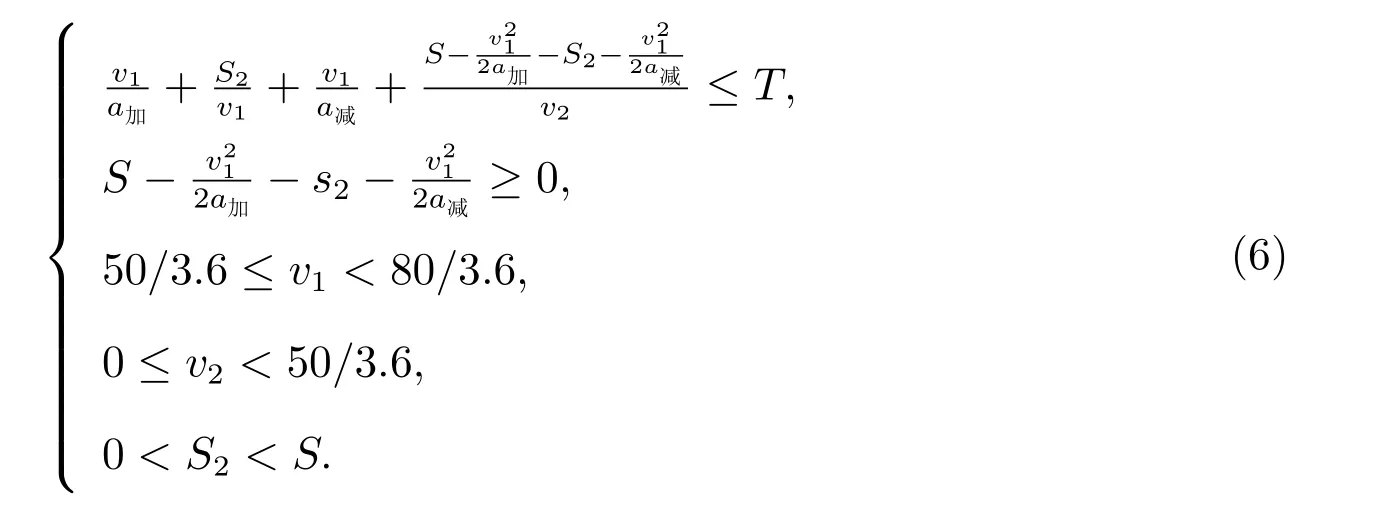
各段距離之和需滿足式(5)中的等式約束,結(jié)合距離約束,把時間約束條件下的S4用S2來表示,同時追加S4≥0的不等式約束條件,可將約束條件轉(zhuǎn)換為以v1,v2,S2三個參數(shù)為自變量的優(yōu)化問題求解.最后,根據(jù)限制條件設(shè)定v1,v2,S2初值范圍,最終轉(zhuǎn)換后的列車運(yùn)行約束條件如下
2.4 城軌列車能耗分析
城軌列車運(yùn)行過程可以分為牽引、巡航和制動三個不同階段,牽引力和制動力不同時存在,所求列車的能耗即為牽引力或制動力的做功總和.牽引力和制動力均受阻力影響,基本阻力隨速度變化而變化,坡道阻力和曲線阻力恒定,在求解牽引力或制動力時,可先忽略坡道阻力和曲線阻力的影響,最后在總能耗中增加坡道阻力和曲線阻力做功[6-8].
1) 牽引階段做功
牽引階段的列車能耗為牽引力做功,速度改變影響列車基本阻力大小進(jìn)而影響牽引力大小,對于牽引力的做功可按照

的積分方式進(jìn)行計算,其中W牽為牽引力做功,單位:J;F牽為關(guān)于速度v的牽引力函數(shù),單位:N.
對列車進(jìn)行受力分析,忽略坡道阻力和曲線阻力可求得牽引力函數(shù)如下

其中M為列車總重量,單位:t;g為重力加速度,單位:m/s2.
2) 巡航階段做功
巡航階段的列車能耗同樣為牽引力做功,由于速度恒定,忽略坡道阻力和曲線阻力時,牽引力恒等于列車阻力.巡航過程的牽引力做功易于求得,即為巡航時的牽引力與對應(yīng)巡航距離的乘積

其中W巡為巡航時牽引力做功,單位:J;S巡為巡航距離,單位:m.
3) 制動階段做功
制動階段的列車能耗為制動力做功,速度改變影響基本阻力大小進(jìn)而影響制動力大小,對于制動力的做功可按照

的積分方式進(jìn)行計算,其中W制為制動力做功,單位:J;F制為關(guān)于速度v的制動力函數(shù),單位:N.
對列車進(jìn)行受力分析,忽略坡道阻力和曲線阻力可求得制動力函數(shù)如下

4) 附加阻力做功
根據(jù)式(2)和(3),結(jié)合圖2的運(yùn)行速度曲線圖中參數(shù),可求得坡道阻力和曲線阻力兩種附加阻力,相對應(yīng)的距離參數(shù)固定已知,坡道阻力和曲線阻力做功即為阻力與距離乘積

其中W坡為坡道阻力做功,單位:J;W曲為曲線阻力做功,單位:J;S坡為坡道長度,單位;m;S曲為曲線長度,單位:m.
城軌列車的總能耗為上述牽引階段做功、巡航階段做功、制動階段做功、坡道阻力和曲線阻力做功的總和.總能耗W總表達(dá)式如下

根據(jù)實際運(yùn)行情況,求得對應(yīng)城軌列車總能耗表達(dá)式可作為智能優(yōu)化算法的適應(yīng)度函數(shù).
3 基于粒子群算法的優(yōu)化計算方法
粒子群算法是研究鳥類個體與群體協(xié)作、競爭行為發(fā)展起來的搜索算法,算法的基本思想是通過群體中個體之間的協(xié)作和信息共享來尋找最優(yōu)解,具有高度并行、隨機(jī)、自適應(yīng)等特點(diǎn),適用于難以求解的非線性約束優(yōu)化問題[9].
該算法是由一組粒子在搜索空間中運(yùn)動,受其自身的最佳過去位置pbest和整個群或近鄰的最佳過去位置gbest的影響,每次迭代粒子i的第d維速度和位置更新公式如下

城軌列車節(jié)能優(yōu)化操縱是在式(6)所示的非線性約束條件下的難以求解的最優(yōu)問題,適合用粒子群算法進(jìn)行優(yōu)化求解.粒子群算法的最優(yōu)解在適應(yīng)度函數(shù)最小值時取得,可將城軌列車總能耗作為目標(biāo)適應(yīng)度函數(shù),結(jié)合非線性約束條件,以v1,v2,S2為自變量,該模型可表示為

經(jīng)過反復(fù)測試,結(jié)合通用的參數(shù)取值[10],最終設(shè)定該粒子群算法的主要參數(shù),如表2所示.
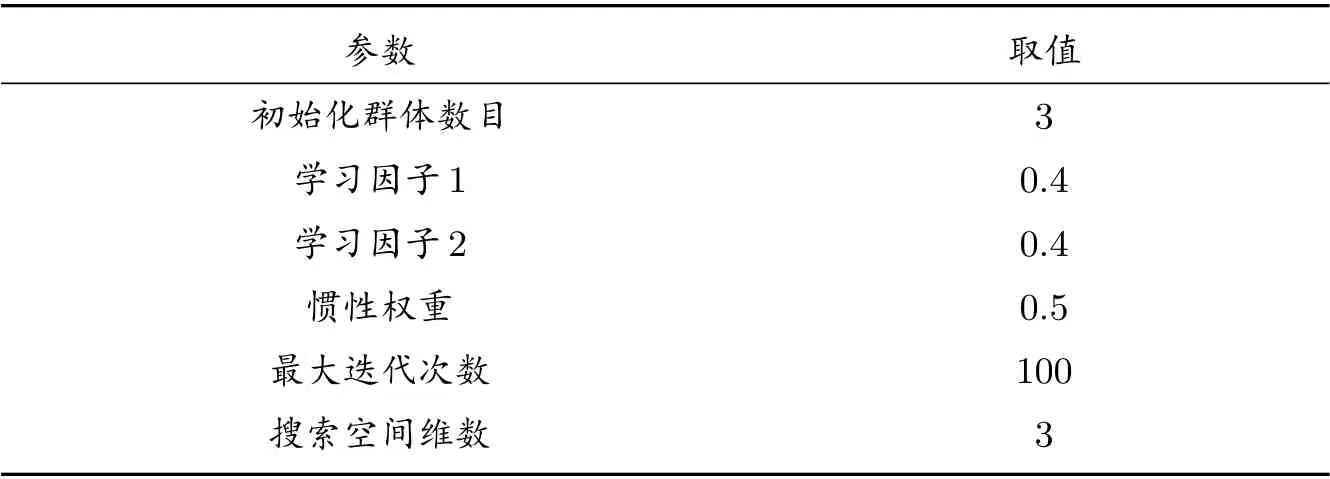
表2 粒子群算法參數(shù)設(shè)置
采用粒子群算法,把求解列車最優(yōu)能耗轉(zhuǎn)化為非線性約束的函數(shù)極小值的尋優(yōu)過程[11,12],粒子群優(yōu)化算法求解列車最優(yōu)能耗操縱曲線的具體流程如下:
步驟1初始化種群,設(shè)置種群數(shù)目,對每個種群粒子v1,v2,S2的隨機(jī)位置和速度進(jìn)行設(shè)定;
步驟2判斷是否滿足式非線性約束條件,如果不滿足,回到步驟1;
步驟3將總能耗作為適應(yīng)度函數(shù),對每個3維種群進(jìn)行適應(yīng)度計算,記錄當(dāng)前種群中適應(yīng)度最好的位置與所有種群中適應(yīng)度最好的位置;
步驟4根據(jù)學(xué)習(xí)因子與慣性權(quán)重對每個種群粒子的位置和速度進(jìn)行更新;
步驟5對于新生成的粒子判斷是否滿足式(16)非線性約束條件,如果不滿足,則舍棄新代粒子,選用上一代粒子,回到步驟3;
步驟6判斷是否滿足終止條件,如果不滿足,回到步驟3;
步驟7輸出結(jié)果,得到v1,v2,S2取值.
粒子群算法求解城軌列車最優(yōu)能耗操縱曲線的流程,如圖3所示.
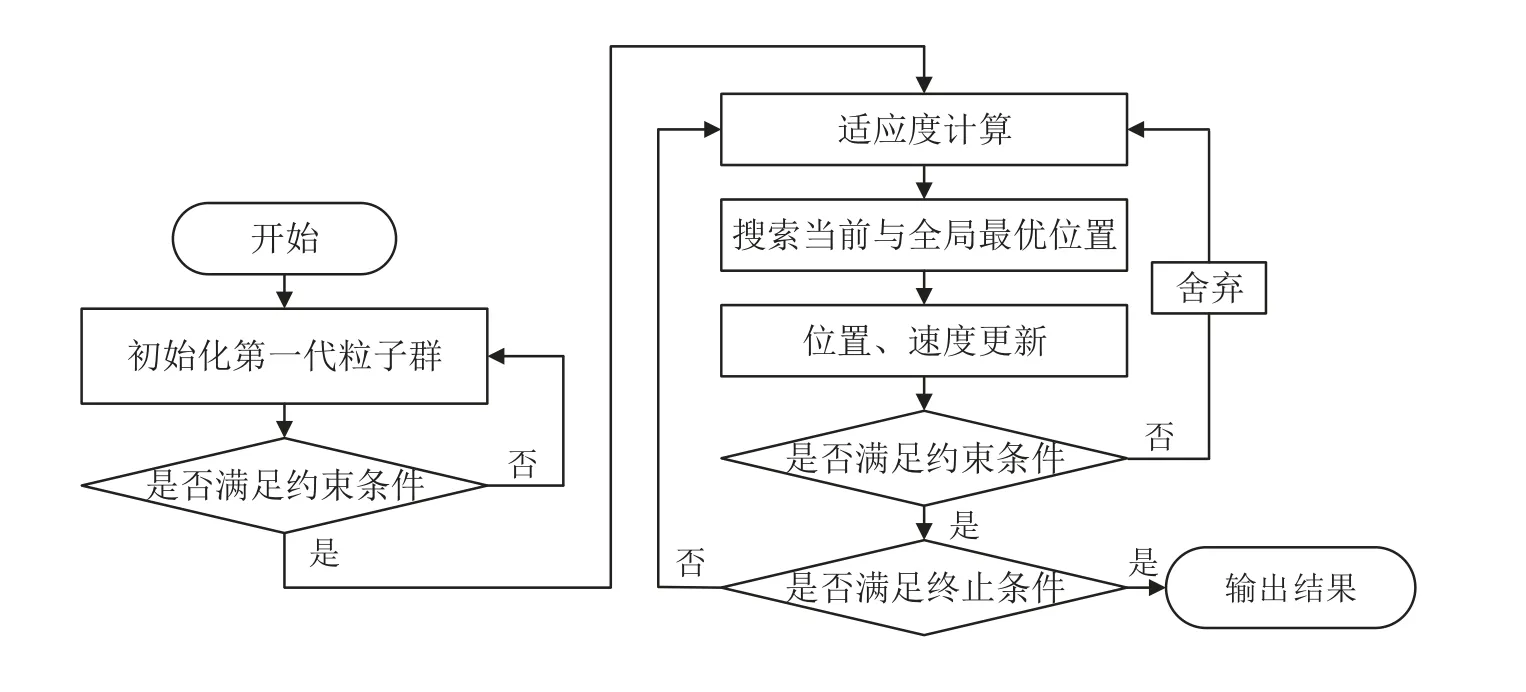
圖3 粒子群算法流程圖
基于某市站間區(qū)段城軌列車實際的運(yùn)行數(shù)據(jù),經(jīng)過多次求解,得到符合約束條件的若干解,表3列舉了典型的A站到B站中兩次巡航速度v1和v2、第一次巡航距離S2、總時間T、總能耗W的結(jié)果數(shù)據(jù).

表3 粒子群算法優(yōu)化結(jié)果
優(yōu)化后的運(yùn)行速度曲線,如圖4所示.
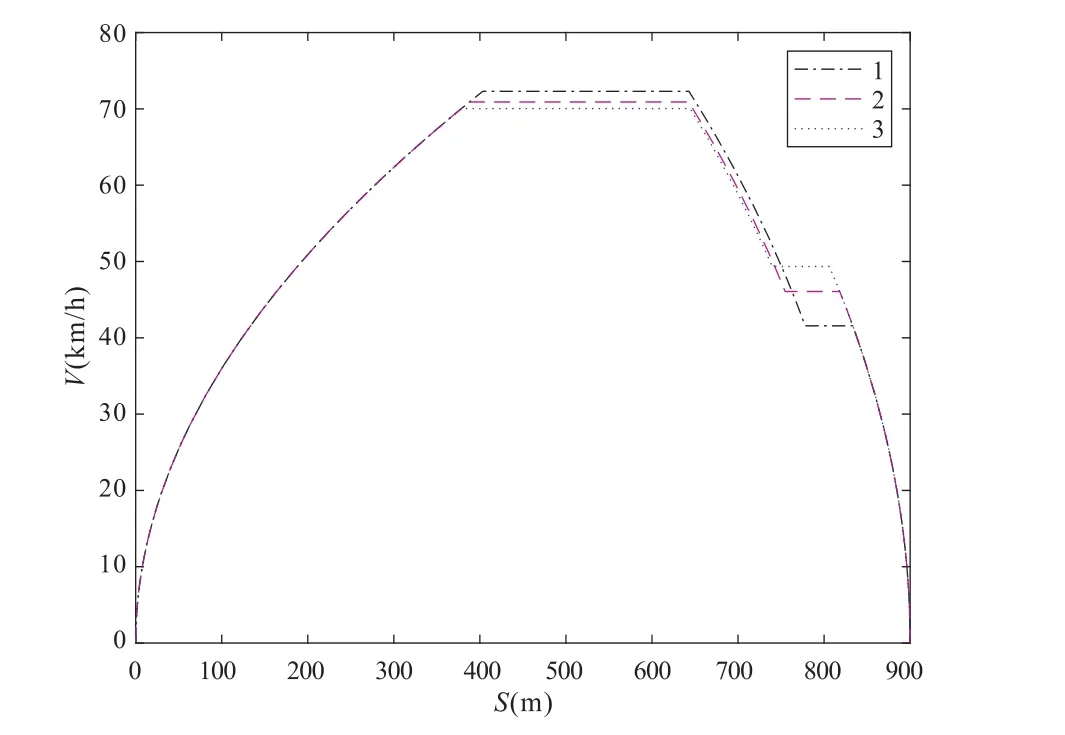
圖4 粒子群算法優(yōu)化運(yùn)行速度曲線圖
4 基于遺傳算法的優(yōu)化計算方法
遺傳算法是模擬達(dá)爾文生物進(jìn)化論中的自然選擇和遺傳學(xué)機(jī)理的生物進(jìn)化過程的計算模型,是一種通過模擬自然進(jìn)化過程搜索最優(yōu)解的方法[13].遺傳算法同樣適用于求解非線性約束下的最優(yōu)化問題,例如城軌列車節(jié)能優(yōu)化操縱問題[14-16].
根據(jù)研究背景,可將城軌列車總能耗作為適應(yīng)度函數(shù),以速度約束、時間約束和距離約束作為約束條件.遺傳算子方面:選擇算子采用輪盤賭的選擇策略,適應(yīng)度高的個體被直接復(fù)制到下一代群體中;交叉算子采用單點(diǎn)交叉.在兩個個體的同一位置處進(jìn)行交叉重組,形成兩個新的個體;變異算子采用均勻變異,使子代基因按小概率振動產(chǎn)生變化,將所選個體位取反.遺傳算法的最優(yōu)解在適應(yīng)度函數(shù)最大值時取得,需將城軌列車總能耗的相反數(shù)作為目標(biāo)適應(yīng)度函數(shù),結(jié)合非線性約束條件,以v1,v2,S2為自變量,該模型可表示為經(jīng)過反復(fù)測試,結(jié)合通用參數(shù)取值[17],最終設(shè)定該遺傳算法的主要參數(shù),如表4所示.


表4 遺傳算法參數(shù)設(shè)置
采用遺傳算法,把求解城軌列車最優(yōu)能耗操縱曲線轉(zhuǎn)化為非線性約束的函數(shù)極大值的尋優(yōu)過程,用遺傳算法求解列車能耗的具體流程如下:
步驟1初始化種群,設(shè)置種群數(shù)目,每個種群隨機(jī)編碼為3列20位二進(jìn)制數(shù);
步驟2判斷是否滿足式(17)中的非線性約束條件,如果不滿足,回到步驟1;
步驟3將總能耗作為適應(yīng)度函數(shù),對每個種群進(jìn)行適應(yīng)度計算,求取最小值;
步驟4選擇操作采用輪盤賭法;
步驟5交叉操作采用單點(diǎn)交叉法,交叉概率參數(shù)如表4所示;
步驟6變異操作采用均勻變異法,變異概率參數(shù)如表4所示;
步驟7對新生成的種群判斷是否滿足式(17)中的非線性約束條件,如果不滿足,舍棄新代種群,選用上一代種群,回到步驟3;
步驟8判斷是否滿足終止條件,如果不滿足,回到步驟3;
步驟9輸出結(jié)果,得到v1,v2,S2取值.
遺傳算法求解城軌列車能耗流程圖,如圖5所示.

圖5 遺傳算法流程圖
基于某市站間區(qū)段城軌列車實際的運(yùn)行數(shù)據(jù),經(jīng)過多次求解,得到符合約束條件的若干解,表5列舉了典型的A站到B站中兩次巡航速度v1和v2、第一次巡航距離S2、總時間T、總能耗W的結(jié)果數(shù)據(jù).

表5 遺傳算法優(yōu)化結(jié)果
優(yōu)化后的運(yùn)行速度曲線,如圖6所示.

圖6 遺傳算法優(yōu)化運(yùn)行速度曲線圖
5 結(jié)果分析
使用粒子群算法和遺傳算法求解得到的城軌列車優(yōu)化操縱曲線符合實際物理意義,具有較高的可靠性.一方面,輪軌關(guān)系研究表明,列車運(yùn)行速度越高,輪軌之間的作用越劇烈,因此列車運(yùn)行的基本阻力也越高;另一方面,空氣動力學(xué)研究表明,列車運(yùn)行速度越高,城軌列車所受的空氣阻力也越大,將造成較高的能耗.因此,在滿足時間和限速等約束條件下,較低的列車運(yùn)行速度可以降低列車運(yùn)行基本阻力和空氣阻力以減少能耗.此外,在列車實際操縱中,建議減少不必要的瞬時牽引與緊急制動,應(yīng)多選用平穩(wěn)提速和巡航等操縱方式運(yùn)行以減少能耗.綜上所述,使用粒子群算法和遺傳算法求解得到的優(yōu)化操縱曲線符合列車實際運(yùn)行要求.
粒子群算法和遺傳算法求得的結(jié)果相近,均符合實際運(yùn)行要求,從而驗證了兩種算法的穩(wěn)定性.兩種算法多次運(yùn)行后的平均結(jié)果,如圖7所示,可以看出粒子群算法更注重總能耗的全局最優(yōu),求解的速度結(jié)果較低,總時間裕度較小;遺傳算法更注重于列車運(yùn)行時間與能耗的結(jié)合,求解的總時間具有一定裕度,結(jié)果相對于粒子群算法有所優(yōu)化.同時,粒子群算法較遺傳算法運(yùn)行時間較快,在同等計算效率要求下,應(yīng)用遺傳算法需要相應(yīng)減小初始種群數(shù)量與遺傳代數(shù).最終將求解的運(yùn)行速度曲線應(yīng)用到某城市軌道交通實際線路運(yùn)行區(qū)間中,經(jīng)驗證該方案不僅可以在列車實際運(yùn)行中為司機(jī)提供優(yōu)化操縱指導(dǎo),而且每月還可以降低列車在該區(qū)間運(yùn)行的平均能耗達(dá)到3%以上,具有較好的實際應(yīng)用效果.

圖7 優(yōu)化運(yùn)行速度曲線對比圖
6 結(jié)論與展望
1) 粒子群算法和遺傳算法兩種智能計算方法均可應(yīng)用于城軌列車節(jié)能優(yōu)化操縱曲線的設(shè)計上,并且具有相近的優(yōu)化結(jié)果,可為城軌列車的節(jié)能優(yōu)化操縱運(yùn)行提供有效指導(dǎo).
2) 遺傳算法求解的巡航速度高于粒子群算法,且總時間留有一定裕度,更貼合算例中某市城軌區(qū)段線路的實際運(yùn)行情況,因此,建議將粒子群算法的求解結(jié)果作為遺傳算法的初始種群輸入,采用遺傳算法求解最優(yōu)節(jié)能優(yōu)化操縱曲線結(jié)果對該線路的實際運(yùn)行提供指導(dǎo).
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
