考慮失效相關的兩類主輔并聯系統模糊可靠性分析
2021-08-10 12:59:48何有宸尹東亮謝經偉
哈爾濱工業大學學報 2021年8期
何有宸,狄 鵬,陳 童,尹東亮,謝經偉
(1.空軍預警學院 防空預警裝備系,武漢 430019;2.海軍工程大學 管理工程與裝備經濟系,武漢 430033)
部件發生劣化,對其余部件壽命造成影響,這樣的現象稱為失效相關[1]。關于多狀態系統可靠性理論的現有研究大多假設系統部件間的失效規律相互獨立,忽視了部件之間失效相關問題對系統整體可靠性的影響,這雖然簡化了模型,降低了解析難度,但往往會對系統可靠性估計過高,影響技術人員決策,導致維修保障力量及備件儲存等不能很好地適用于實際問題。隨著復雜多狀態系統大量應用于科學研究,尤其是在航空航天、核工業等高精尖領域,對系統可靠性評估提出了越來越高的要求,失效相關問題不容忽視。
鑒于此,人們越來越重視系統中的失效相關現象,并對此展開研究[2-4]。Zuo等[5]研究了基于證據網絡的共因失效系統,并對模型參數的不確定性進行了分析。Zhang等[6]研究了載荷共享機制下存在失效相關的并聯系統可靠性。Parkinson[7]基于單元失效相關性推導出串聯系統可靠性區間,計算出任意兩子單元的聯合可靠性指標。Levitin在失效相關方面做了大量工作,對系統部件失效獨立和失效擴展并存而引起共因失效的二態系統可靠性進行了研究[8],針對存在共因失效的串并聯不可修多狀態系統,基于通用發生函數方法提出了一個兩階段的隱性方法評估系統可靠性[9],并且針對多狀態系統組件之間失效傳播時間具有隨機性的特點,利用通用發生函數以及廣義可靠性框圖對系統可靠性進行評估[10]。劉宇等[11]考慮單元載荷動態變化對單元失效規律的影響,針對二態單元構成的并聯多狀態不可修系統建立了馬爾可夫模型,得到了系統可靠度,并分析了系統的組成結構和單元的載荷動態分配策略對系統可靠度的影響規律。張卓琦等[12]在考慮部件間失效率相關的基礎上,為降低兩部件系統的維修成本,研究了年齡預防性維修與機會維修相結合的維修策略。唐家銀等[13]為解決可修表決系統中部件的失效相關問題,根據部件之間壽命的正相關關系,運用Copula函數,建立了失效相關表決系統可靠性模型,并全面考慮了共因失效、部件工作壽命及維修時間分布的一般性。周志剛等[14]在研究風力發電機齒輪傳動系統動態可靠性時以應力-強度干涉模型刻畫齒輪間的失效相關性。姚運志等[15]為解決存在失效相關現象的多部件系統預防性維修問題,引入失效相關系數,對復雜裝備預防性維修模型進行研究。
目前,針對兩狀態單元構成的失效相關系統已有較為深入的研究,但由于多狀態可修系統的失效相關問題較為復雜,現有研究大多考慮運用特定函數或明確的失效相關機理對這一性質進行描述,較少考慮環境時變、部件狀態性能波動、外部沖擊等導致失效相關性不明確的情況,造成模型適用性有所降低[16]。
基于此,Ding和Lisnianski[17]首先提出了模糊多狀態系統的概念,并對傳統的通用發生函數進行改進,引入了模糊通用發生函數對系統可靠性進行研究。隨后,模糊多狀態理論被廣泛應用于模糊可用度、模糊概率及模糊可靠性等方面[18-22]。目前,雖然模糊可靠性理論已有較為豐富的研究,但在考慮系統參數模糊性的同時,考慮部件之間失效相關現象及其模糊性的研究卻少有涉及。而忽略失效相關現象時常會導致可靠性指標估計過高、區間過窄的情況,難以滿足工程實際需求。
作為一類常見的多狀態系統,主輔單元并聯的形式廣泛存在于工程實際中,結構功能具有鮮明特點。主單元承擔了系統的主要功能,輔單元起到配合作用,除分擔小部分功能外,還能使系統運行更加穩定,減緩主單元的失效進程,從而提高系統可靠性[23]。對于這類系統,根據輔單元主要功能的不同可以進行分類,如輔單元的作用為協助主單元進行功率輸出,此類系統可稱為“協同型”主輔并聯系統;或是減緩主單元劣化速度,代替主單元承受外部沖擊,這類可稱為“保護型”主輔并聯系統。考慮到上述兩類主輔并聯系統大量應用于工程實踐,分別對其進行可靠性研究具有一定意義。
因此,本文主要針對外部環境復雜程度高、時變性強導致系統部件性能水平、劣化規律存在不確定性,且又對可靠性指標等評估具有較高要求的系統進行分析研究,從部件性能模糊性及失效相關性入手,著重分析了兩類典型的主輔并聯系統。將系統各部件的失效轉移率、修復轉移率及狀態性能水平均視為模糊數的同時,考慮了系統的失效相關問題。對兩類系統分別建模后運用Zadeh擴張原理分析了系統模糊狀態概率的隸屬函數,采用參數規劃技術得到了系統的穩態指標,并通過實際算例給出了系統穩態指標隨部件參數模糊性變動的情況,驗證了模型的適用性。
1 協同型主輔并聯系統
1.1 系統介紹
1.1.1 模型描述及失效相關規則建立
假設系統由主、輔單元并聯構成,此處的“并聯”并不僅僅是傳統意義上的結構并聯,更體現出“協同”的特點,即主單元A承擔系統主要性能輸出,輔單元B對系統性能輸出具有一定促進作用。
考慮主單元A內組成部件存在失效率相關,即某一部件發生劣化,可能會導致剩余工作件的失效率增大。此類情況在工程實際中較為普遍,例如某電子元器件失效瞬間產生瞬時電流沖擊,對一定范圍內的工作件產生影響,又如常見的流量傳輸系統,其中一條路徑失效后,載荷將轉移到剩余路徑,導致剩余路徑加速劣化。
對于此類失效率相關的問題,相關系數的確定仍舊是一個較為困難的問題。尤其是對于大型復雜系統,各組成部件之間的失效率相關系數更加難以確定,而且經常會隨著外部環境、自身性態的變化而出現波動。因此,為說明問題,在一定程度的誤差允許范圍內,以模糊數刻畫部件之間的失效率相關系數是較為合理的。
同時,輔單元B除了確保系統平穩運行,減緩主單元失效進程外,主要功能為協同主單元進行一定的性能輸出,此為協同型主輔并聯系統的典型特征。注意到輔單元B與主單元A之間存在協同關系,因此輔單元發生失效的瞬間也可能對主單元產生一定載荷沖擊,使得主單元加速劣化。這樣的情況很常見,如電子系統內部,某元器件失效,導致電路內瞬時電流增大,可能會燒毀主板。
基于上述分析,對“協同型”主輔并聯系統作進一步描述并建立失效相關規則如下:
a)主單元A各組成部件為逐級劣化,每次維修時都將主單元修復到完好態,且修復如新;
b)部件之間存在失效相關閾值,即某一部件劣化后不一定引起剩余部件失效率增大,而是存在一定的條件,如失效件劣化的程度、剩余工作件的狀態性能水平、復雜多變的外部環境等。典型的例子有承重系統,某承重梁發生失效,將自身載荷轉移到剩余承重梁,若未超過應力極限,則可忽略此影響,否則可能導致承重梁出現裂痕,并迅速引發劣化,甚至出現折斷的現象;

d)同一時刻主單元內部有多個部件發生劣化的概率極小,暫忽略不計;
e)輔單元B為逐級劣化,每次維修都將其修復至前一狀態,完全失效時直接修復到完好態,且能修復如新;

g)主單元A獨立失效模式與遭受載荷沖擊發生劣化的模式相互獨立,構成多模失效,擁有各自的失效轉移率、修復轉移率及狀態空間;
h)系統所有部件失效時間、修復時間均服從指數分布且相互獨立。
1.1.2 重要參數定義及符號說明
表1 模型1參數符號及定義Tab.1 Parameters and definitions of model 1
1.2 模型的構建與分析
模型1主單元內部失效相關建模。根據上述分析,可得模型1(即主單元內各部件)的狀態轉移圖,見圖1。
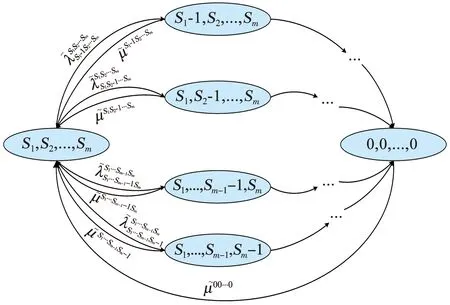
圖1 主單元模糊狀態轉移Fig.1 Fuzzy state transition diagram of main unit

由圖1可得主單元狀態轉移的Kolmogorov微分方程組
(1)
(2)
(3)
其中0≤ij≤Sj,1≤j≤m,且當ij-1<0或ij+1>Sj時,對應的參數值均為零。

(4)
結合主單元各項參數,可得狀態概率的下邊界為
(5)
上邊界為
(6)

模型2輔單元對主單元存在失效沖擊建模。考慮輔單元對主單元存在失效沖擊時,模型的狀態轉移過程見圖2,由此可得模型狀態轉移的Kolmogrov微分方程組。

圖2 考慮失效沖擊的系統模糊狀態轉移Fig.2 Fuzzy state transition diagram of system with failure
當i=0時:
(7)
(8)
(9)
當1≤i≤k-1時:
(10)
(11)
(12)
(13)
當i=k時:
(14)
(15)
(16)
(17)
(18)
下邊界為
(19)
上邊界為
(20)
1.3 系統模糊穩態指標
1)系統模糊穩態可用度


(21)
其中0≤α≤1。
因此,由清晰集下系統可用度定義,可得系統模糊穩態可用度
(22)


(23)

(24)
2)系統平均穩態性能輸出
(25)


(26)

(27)
3)主、輔單元處于完好態的穩態概率
由于主單元較為重要,很多時候除了對系統整體可用度提出要求外,使用者還要求主、輔單元滿足一定性能。因此掌握主、輔單元處于完好狀態的穩態概率對合理進行系統可靠性評估、維護保養及結構優化具有重要意義。
4)系統必然可用度
考慮到模糊系統的特點,部件參數模糊程度的大小對系統可用度有直接影響。而必然可用度則是衡量所有部件處于最低性能時系統可用的概率,即無論部件參數模糊程度如何,系統都能滿足使用者需求的概率,這是模糊系統可靠性中不容忽視的指標之一。
2 保護型主輔并聯系統
2.1 模型描述
2.1.1 模型描述及失效相關規則建立
工程實際中,除了前面研究的功率輸出協同型系統外,還存在大量“保護型”主輔并聯系統。即主單元承擔了系統的全部功能,輔單元的主要作用為保護主單元不受外部環境等因素的影響,使得主單元處在一個盡量平穩的工作環境中,借此延緩主單元的失效進程,大到航空發動機的外層防護裝置,小如晶體管的密封層,實際上都起到了保護主要單元,減緩主要單元退化進程的作用。本節對此類“保護型”系統進行研究,為工程實際提供一些參考。
考慮某主輔單元構成的“保護型”系統,其中主單元承擔系統功能,輔單元為保護單元,主要作用為防止主單元因外部侵蝕(如高溫、高濕、高鹽或強電磁環境等),或是遭受隨機的外部沖擊而導致主單元瞬間失效的情形。此時認為系統的失效相關主要由兩部分構成,一是主單元內部之間的失效相關。結合工程實際,對于存在載荷共享機制的系統,常用Power Law規則描述部件之間的失效相關關系,認為系統承受的總載荷平均分配給組成部件[11]。
此外,由于輔單元的保護作用,可以代替主單元承受來自系統外部的隨機沖擊,起到保護主單元的作用,但輔單元承受的累積沖擊超過承受能力時便會進入完全失效態,且此次外部沖擊的剩余載荷會導致主單元一定概率發生劣化。
根據上述分析,現假設主單元由m種不同部件并聯而成,第i類部件的數量為Ni個(1≤i≤m),則主單元總的部件數目為Z=N1+N2+…+Nm。輔單元共有MF+1個不同狀態,其中MF為完好態,0為完全失效態,且輔單元的固有失效模式為逐級劣化。下面對問題作進一步描述。
1)主單元
a)主單元由不同類型部件構成,為并聯結構;
b)主單元所有組成部件均只有“完好”和“失效”兩個狀態,部件的失效時間服從指數分布;
c)任意時刻系統中有兩個及兩個以上部件同時發生失效的概率極小,暫忽略不計;

e)主單元構成部件為逐級劣化,考慮到主單元相對重要,若發生劣化則直接將其修復到完好態,且修復如新。
2)輔單元
a)輔單元的固有失效模式為逐級劣化,且每次維修都將其修復到前一狀態;


d)輔單元完全失效后直接將其修復到完好態,此時若主單元也因外部沖擊而劣化,則也對主單元進行維修,消除外部沖擊造成的損傷(不包括主單元自然失效產生的影響);
e)所有部件的失效時間均服從指數分布且相互獨立。
2.1.2 重要參數定義及符號說明
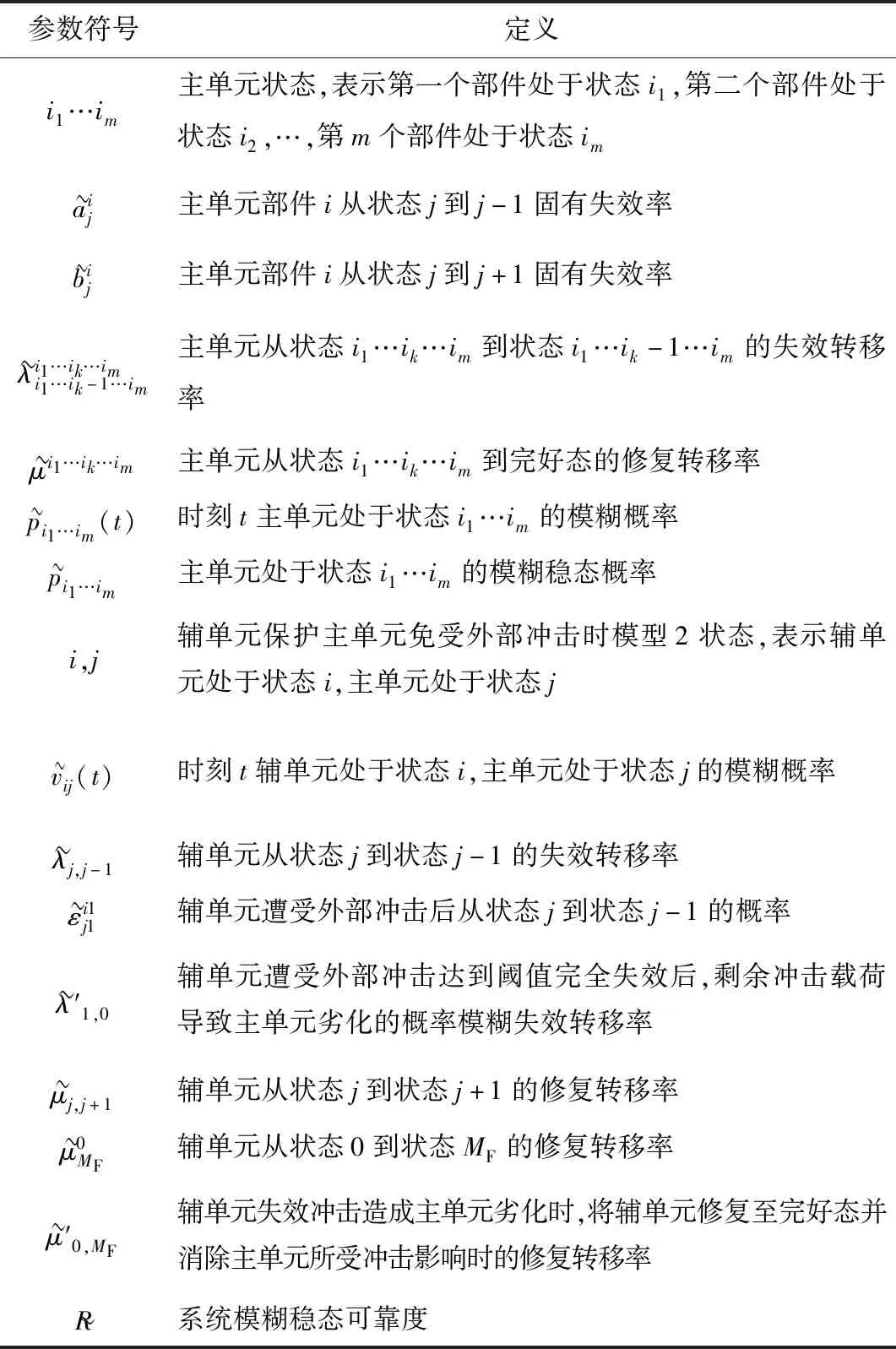
表2 模型2參數符號及定義Tab.2 Parameters and definitions of model 2
2.2 模型的構建與分析
模型1主單元內部失效相關建模。由假設可知,主單元組成部件均為二態部件,故主單元狀態轉移過程仍可用圖1表示,在求解狀態轉移微分方程組時只需將同型部件歸類即可。其中任一狀態(i1,…,im)表示主單元中1型完好部件的數量為i1,2型完好部件的數量為i2,…,m型完好部件的數量為im。
模型2輔單元承受沖擊失效相關建模。根據假設,令Z(t)={0,1,…,MF}、L(t)={0,1}分別表示此過程中輔單元狀態及主單元狀態。L(t)=1表示主單元因輔單元保護未受到外部沖擊引發劣化,L(t)=0表示因輔單元完全失效,外部沖擊剩余載荷導致主單元發生劣化,進入不可用狀態。此時,由于引發劣化的影響因素不同,故可認為外部沖擊失效與主單元的固有失效相互獨立,構成多模失效。
由此可得模型狀態轉移圖見圖3。
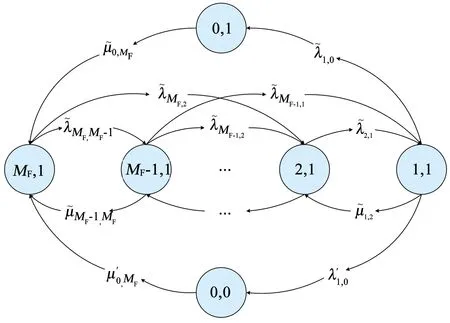
圖3 承受外部沖擊時系統狀態轉移Fig.3 State transition diagram of system subject to external impact
相應的Kolmogrov狀態轉移微分方程組為

(28)

(29)

(30)
(31)
(32)
2.3 系統穩態指標
1)模糊穩態可靠度
假設主單元中有至少C個部件完好時系統正常工作,由清晰集下系統可靠度的定義可得模糊條件下系統穩態可靠度。
(33)

2)主單元j型部件的平均故障數量
得到每種類型部件的穩態平均故障數量,有利于更好制定維修保障方案。
(34)
3)系統平均工作件數量
工作件數量代表了系統遂行任務的能力,對于表決系統,這一指標尤為重要。
(35)
3 實例分析
3.1 協同型主輔并聯系統


表3 模型1部件模糊失效(修復)轉移率Tab.3 Fuzzy failure(repair)transfer rate of components in model 1
限于篇幅,這里直接給出數學軟件計算后系統穩態指標隨水平截集α變動的情況(見圖4)。此處α的實際意義是代表了部件參數的模糊程度,當α=0時,部件參數的取值區間最為寬泛,即模糊程度最大,也即表明系統部件的性能狀態較為模糊;當α趨近于1時,參數的取值范圍越來越精確,即參數的模糊程度越來越小,系統部件的狀態性能就越來越明確;當α=1時,代表部件參數的取值范圍為一精確數,系統部件狀態性能水平是確定的。
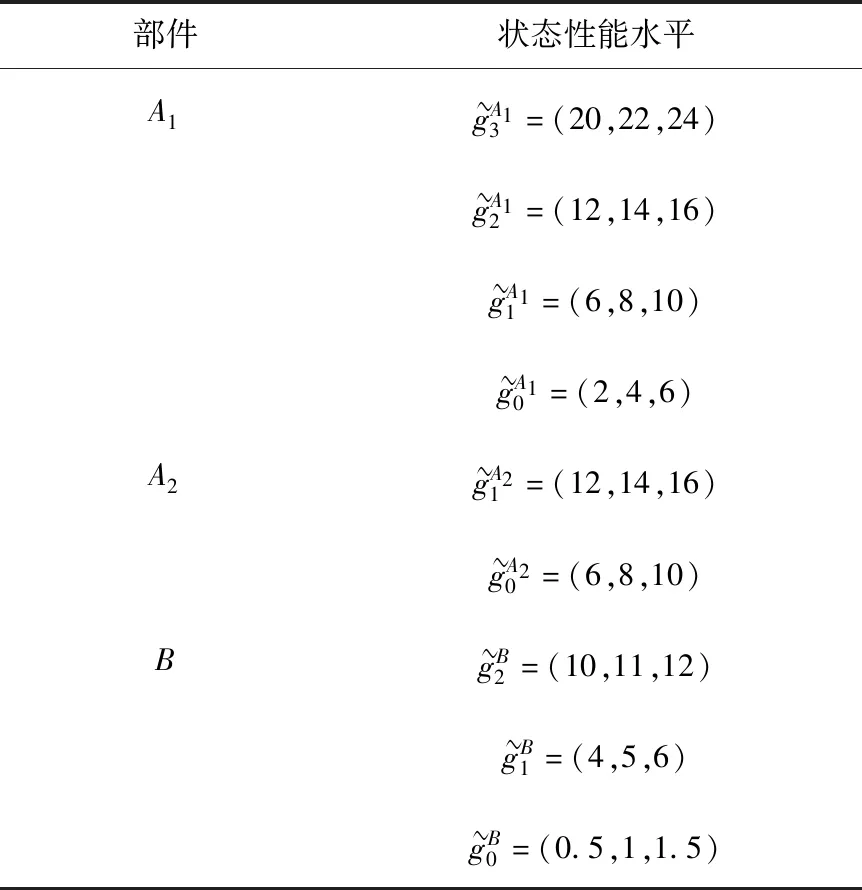
表4 模型1部件狀態性能水平Tab.4 Performance level of components in model 1
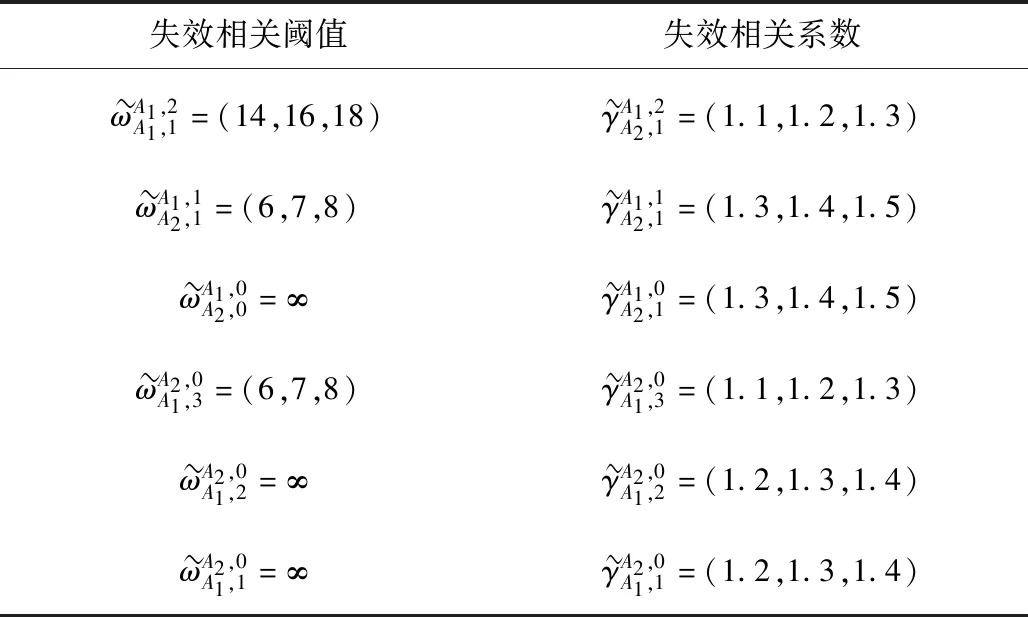
表5 模型1模糊失效相關閾值(系數)Tab.5 Fuzzy failure-correlation threshold (coefficient)of model 1

圖4 模型1系統模糊穩態指標Fig.4 System fuzzy steady state features of model 1
由圖4(a)可知,若考慮部件之間的失效相關性,得到的穩態可用度約為0.833~0.958之間,忽略部件失效相關帶來的影響,則在0.885~0.98之間,若使用者對設備的要求為長期運行后的可用度不低于0.85,則忽略失效相關會導致出現判斷錯誤的情況,甚至在高強度的環境下運行,可能導致部件的參數性能降至最低,系統可用度無法滿足需求。更進一步地,若使用者的可用度需求為不低于0.9,則進行系統升級時需將失效相關納入考慮范疇,以免出現返工,造成資源浪費。
從圖4(c)及4(d)中可以得到主單元、輔單元各自處于完好態的穩態概率,由于在整個系統中主單元占據主導地位,掌握主單元的狀態性能情況至關重要,且對于維修和保養具有一定策略支持。考慮失效相關時,主單元處于完好態的穩態概率約為0.495~0.795,忽略失效相關時的穩態概率約為0.77~0.93,兩者的區間下界相差較大,達到0.275,可見是否進行失效相關的預計對主單元的可靠性評估具有較大影響。對于輔單元,穩態時其處于完好態的概率較高,約為0.869~0.975。
系統在惡劣環境下滿足使用者需求的能力是值得考慮的重要指標。尤其是對于受到外部環境等因素影響導致狀態性能水平及部件參數具有不確定性的系統,這個指標代表了系統在最差狀態性能水平時都能滿足使用者需求的概率,即系統的必然可用度。圖4(e)給出了穩態時系統的必然可用度,分別為0.538~0.85和0.738~0.935。顯然,提高這個指標對提升惡劣環境下系統的可靠性具有重要意義。
3.2 保護型主輔并聯系統


表6 模型2部件模糊失效(修復)轉移率及輔單元隨機劣化概率Tab.6 Fuzzy failure(repair)transfer rate of components and failure probability of auxiliary unit in model 1
輔單元除保護主單元免受惡劣環境影響之外,還能夠代替主單元承受隨機的外部沖擊,且每次遭受沖擊后輔單元隨機進入某一劣化態,概率如下(見表6)。
由假設,主單元內部的自然失效與外部沖擊導致的劣化構成主單元的多模失效,當遭受外部沖擊且發生劣化時主單元被認為是不可用的。
此時,將輔單元修復至完好態且認為同時將主單元遭受沖擊引發的劣化損傷消除,主單元內部有至少兩個部件工作時,系統正常工作,則可得系統的主要穩態指標(見圖5)。
從圖5(a)可以看出在系統可靠度評估時將部件之間的失效相關關系納入建模中,系統的穩態可靠度約為0.868~0.974,若不考慮部件之間的載荷動態分配情況,則系統穩態可靠度區間為0.925~0.988。不難發現,是否考慮失效相關關系,對系統可靠度區間下界影響較大,兩者差值為0.057。若使用者(即用戶)要求設備長期運行后的可靠度不低于0.9,那么假如不考慮部件之間的失效相關性無疑會產生誤判,甚至導致更為嚴重的后果。
圖5(b)及(c)給出穩態時主單元中A1部件和A2部件的平均故障數量,由此可以對系統長期運行時所需維修力量及維修經費作出合理安排,同時也便于備件保障方及時準備庫存,合理進行備件采購。
圖5(d)中給出考慮部件失效相關和忽略部件失效相關時主單元的平均工作件數量,分別為3.18~3.76和3.3~3.78,那么從長遠考慮,在一個時期內準備一個部件的完全維修費用相對經濟,且為了應對緊急情況,確保在任意時刻均有一個備用件 (A1或A2均可)可供更換是較為合理的。

圖5 模型2系統模糊穩態指標Fig.5 System fuzzy steady state features of model 2
4 結 論
1)與傳統可靠性模型相比,考慮了外部環境導致系統部件性能水平及退化特性出現不確定性的情況,運用模糊數對部件參數進行刻畫,同時將部件間大量存在的失效相關現象納入建模之中,避免了對系統可靠性指標估計過高、區間過窄的情形。
2)復雜環境下,部件的失效相關關系有時并不明確,以精確函數或明確機理描述部件間的失效相關性可能并不適用,對此采用模糊數對失效相關關系進行刻畫,通過數據收集等方式,可以避免多狀態系統失效相關復雜性帶來的困擾,同時對于歷史數據缺乏的新型裝備也具有良好的評估作用,更為貼近工程實際。
3)建立了“協同型”和“保護型”兩類典型的主輔并聯系統,分別從主單元的內部失效相關關系,及輔單元對主單元存在失效相關影響的情況進行描述,研究了系統部件的失效率相關及系統間的失效沖擊現象,同時區別于一般研究中直接考慮失效相關性而忽略失效相關發生條件的問題,分析了存在失效相關閾值的情況,通過算例驗證了是否考慮部件失效相關對系統可靠性指標產生的影響。
4)運用α水平截集和Zadeh擴張原理對系統可靠性指標進行求解分析,得到了穩態指標隨部件參數性能模糊程度的變動情況,便于及時掌握不同環環境條件下系統各項性能指標的波動范圍。
5)能夠得到系統長期運行后的換件需求,制定相應的保障計劃,相比傳統可靠性評估,便于更為合理地進行備件儲存及維修力量分配,為研究復雜條件下的主輔并聯系統提供了參考,同時有利于對工程實際中的此類模型進行優化,節約資源與人工。
6)如何在復雜環境下更為合理、精準地描述多狀態系統中的失效相關性,在模糊中把握準確性是下步研究的重點,同時對于可修系統,將維修力量,如修理工人數、維修臺數質量、維修前的準備期等納入考慮,進行全保障任務的可靠性建模研究對工程實際具有重要指導意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19