一種新型船用蝸桿蝸輪自鎖裝置的設(shè)計
2021-08-19 03:52:12何旺星周增康朱發(fā)新李偉觀盧瑋姚凱慧張慧玲鄧淇文周帥
機(jī)械工程師 2021年8期
何旺星,周增康,朱發(fā)新,李偉觀,盧瑋,姚凱慧,張慧玲,鄧淇文, 周帥
(浙江海洋大學(xué)船舶與海運學(xué)院,浙江舟山 316022)
0 引言
船舶抵達(dá)港口時,經(jīng)常因為等候泊位、引水及接受檢疫、避風(fēng)或過泊等情況,需要在錨地拋錨,船舶一般采用電動錨機(jī)、液壓錨機(jī)或電液錨機(jī)來拋錨,以實現(xiàn)船舶制動,保持船位不變。在風(fēng)、浪、流等影響下,錨鏈產(chǎn)生很大拉力時,錨鏈輪與驅(qū)動軸、卷筒不能很好地實現(xiàn)制動,錨鏈被進(jìn)一步釋放,導(dǎo)致船舶的運動范圍變大,可能造成船舶擱淺、碰撞等事故[1]。
為防止錨鏈進(jìn)一步被釋放,需在錨鏈輪上附加一個抵抗外界突變拉力的約束力來保持平衡。本文利用蝸桿蝸輪傳動裝置的自鎖原理[2-4],并加以改進(jìn),將新型蝸桿蝸輪自鎖裝置應(yīng)用于錨鏈輪上,實現(xiàn)錨鏈輪與驅(qū)動軸、卷筒的可靠制動。其改進(jìn)體現(xiàn)在兩方面:1)采用蝸桿蝸輪傳動機(jī)構(gòu),可獲得較大傳動比,有利于船舶繃直錨鏈、回收錨爪;2)新型蝸桿蝸輪自鎖裝置的實質(zhì)是采用雙蝸桿結(jié)構(gòu),自鎖性較好,且利用了PLC監(jiān)測裝置,可精準(zhǔn)控制錨鏈放縮的長度,有利于規(guī)范船舶在港口的停泊位置及增大停泊空間。
1 傳統(tǒng)蝸桿蝸輪傳動機(jī)構(gòu)的自鎖原理
1.1 傳統(tǒng)蝸輪蝸桿減速器基本組成及工作原理
傳統(tǒng)的蝸桿蝸輪減速器[5]由傳動零件蝸桿蝸輪、軸、軸承、箱體及其附件所構(gòu)成。可分為三大基本結(jié)構(gòu)部分:箱體、蝸桿蝸輪、軸承與軸組合。其本質(zhì)是一種動力傳動機(jī)構(gòu),利用齒輪的速度轉(zhuǎn)換器,將電動機(jī)(馬達(dá))減速到所要的回轉(zhuǎn)速度,從而達(dá)到傳遞幾百倍的較大轉(zhuǎn)矩的機(jī)構(gòu)。其中箱體的作用是所有配件的基座,起固定支撐作用;蝸桿蝸輪的主要作用是傳遞兩交錯軸之間的運動和動力。在作動力輸出時,以蝸桿為主動端,蝸輪為從動端,獲得較大傳動比,而在作自鎖時則反向,以蝸輪為主動端,蝸桿從動端;軸承與軸的作用是動力傳遞及提高效率。
1.2 傳統(tǒng)蝸桿蝸輪減速器自鎖條件
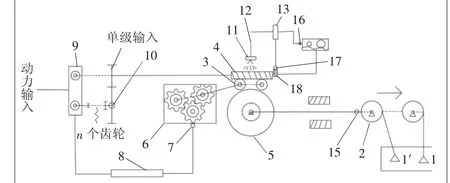
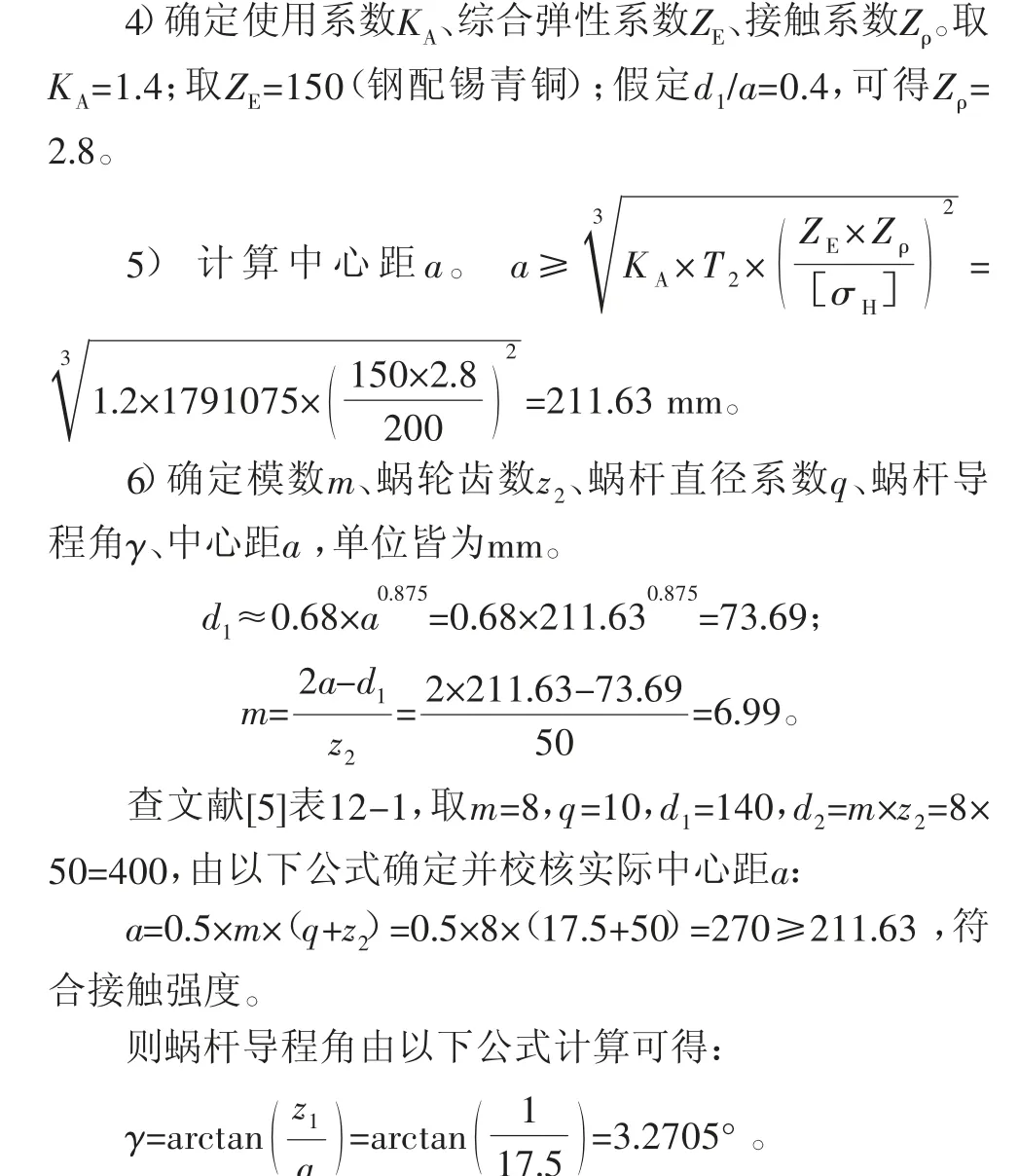
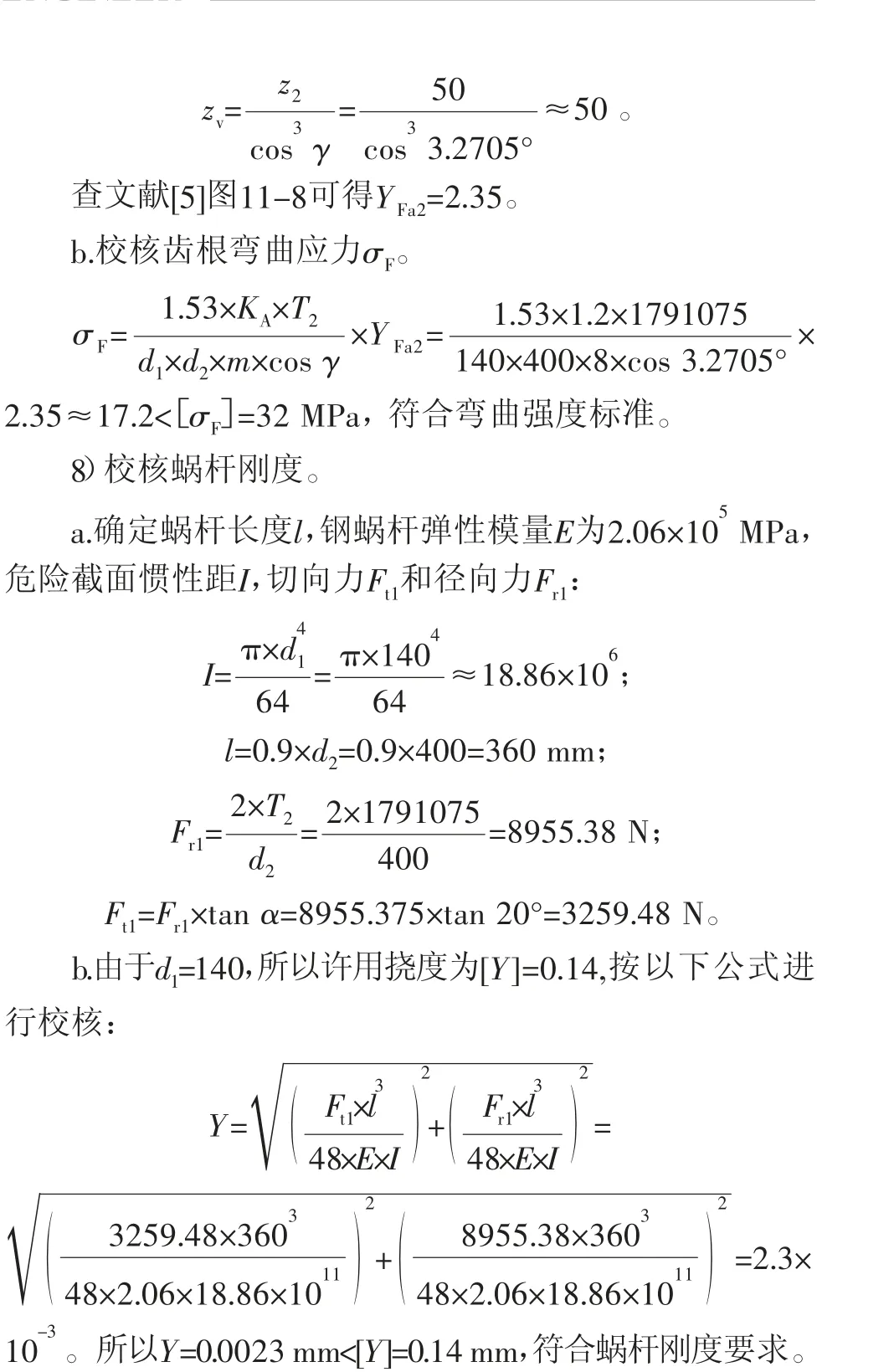
蝸桿蝸輪發(fā)生自鎖的條件[6-7]是蝸桿上升的螺旋角φ小于蝸桿蝸輪接觸的摩擦角ρ,即φ<ρ。其實際原理與斜面上的物體不下滑是一樣的,就是要求G·sin φ 工程上對于不同的蝸輪,其摩擦因數(shù)也不一樣,造成自鎖所需要的蝸桿導(dǎo)程角也不同:一般摩擦因數(shù)ρ=0.6時,蝸桿的導(dǎo)程角應(yīng)小于3°29′11″;當(dāng)摩擦因數(shù)ρ=0.7時,蝸桿導(dǎo)程角應(yīng)小于4°03′57″;當(dāng)蝸輪摩擦因數(shù)為ρ=0.8時,蝸桿的導(dǎo)程角應(yīng)小于4°38′39″。由上述數(shù)據(jù)可表明,隨著當(dāng)量摩擦因數(shù)的增加,自鎖所需的導(dǎo)程角逐漸放緩。 蝸桿蝸輪作為傳動輸出時,產(chǎn)生的摩擦損失較多,導(dǎo)致其效率比其他形式齒輪之間的傳動效率要低得多。而作為自鎖裝置時,由于摩擦損失較多,當(dāng)量摩擦因數(shù)也就相應(yīng)發(fā)生變化,螺旋升角無法低于當(dāng)量摩擦因數(shù),自鎖也就間接失效。 其次,考慮到摩擦因數(shù)受材料表面潤滑狀態(tài)的影響,蝸桿傳動時輪齒的接觸有油膜的黏附,其結(jié)果是蝸桿的導(dǎo)程角增大,無法保持系統(tǒng)的平衡,自鎖性能大大降低。 此外,蝸桿蝸輪作為減速的裝置,其工作環(huán)境較為復(fù)雜。輪船在海上航行的過程中,容易造成輪齒之間的振動,這時蝸輪與蝸桿之間的運動很有可能從靜摩擦變成動摩擦,摩擦因數(shù)變大,自鎖性能也變得較低。所以合理布置蝸輪與蝸桿之間的安裝位置,減少振動變得尤為重要。 本設(shè)計方案以防止錨鏈進(jìn)一步被釋放為目的,在錨鏈輪的一端加裝可調(diào)傳動比的蝸桿蝸輪自鎖裝置,配以PLC信號監(jiān)測裝置。蝸桿蝸輪自鎖裝置采用可切換動力輸入的同步器和電動機(jī),PLC監(jiān)測裝置采用PLC控制模塊[8]、傳感器和電磁離合器[9]。本設(shè)計裝置須滿足GB/T 549-2017電焊錨鏈[10]所能夠承載的最大載荷476 kN,信號監(jiān)測裝置采用DAM-5161高速脈沖型號,滿足每一潯錨鏈(約1.822 m)的收縮信號能夠?qū)崟r傳輸,精準(zhǔn)自鎖。具體應(yīng)用于船用蝸桿蝸輪裝置的設(shè)計要求如下:1)為滿足蝸桿蝸輪自鎖配合,蝸桿設(shè)計要求應(yīng)為模數(shù)m接近15的單頭螺紋線;2)為盡可能減少潤滑帶來的人工成本,設(shè)計出由PLC控制的點噴噴油裝置;3)船用電動機(jī)設(shè)計功率P滿足實際市場標(biāo)準(zhǔn),即不低于30 kW,不高于50 kW。 利用AutoCAD軟件平臺設(shè)計出新型船用蝸桿蝸輪自鎖裝置(錨鏈固定)的工作原理如圖1所示。 圖1 蝸桿蝸輪自鎖示意圖 由圖1可知,整個蝸桿蝸輪自鎖裝置由3個部分組成:潤滑機(jī)構(gòu)、蝸桿蝸輪傳動機(jī)構(gòu)及由PLC控制的自鎖機(jī)構(gòu)。潤滑系統(tǒng)中的活性碳罐18一方面可以通過吸收空氣中的多余的油氣,使得蝸桿蝸輪之間的嚙合潤滑效果更好;另一方面,油量傳感器17會收集活性碳罐18的油量信號反饋給PLC控制模塊13,模塊再根據(jù)油箱油液傳感器信號16,打開單向閥12,潤滑油會通過噴油嘴11均勻地噴灑而出。下面通過蝸桿蝸輪的工作狀態(tài)來進(jìn)一步說明減速傳動機(jī)構(gòu)和自鎖機(jī)構(gòu)。 1)蝸桿3為主動件,蝸輪5為從動件。當(dāng)蝸桿作為動力輸出時,此時錨爪1′處于海底底部,與錨鏈輪呈一定角度鏈接,伴隨蝸輪5和中間雙蝸桿3的轉(zhuǎn)動,船舶整體向右移動,錨爪逐步從位置1′轉(zhuǎn)為垂直位置1,位置傳感器15檢測到錨爪1位置的變化;轉(zhuǎn)速傳感器7檢測到齒輪箱6三級齒輪轉(zhuǎn)速的變化,并同時把兩者的信號反饋給PLC控制模塊8,模塊記錄錨爪垂直狀態(tài)的信號,此時錨爪開始上升。模塊8通過計算錨鏈輪所需的收縮錨鏈的速率,把錨爪1的運動需求傳達(dá)給電磁離合器9,切換單級輸入為多級輸入,此時同步器10再對多級輸入的傳動比進(jìn)行合理地?fù)Q擋,獲得較合適的傳動比80。此為減速傳動過程。 2)蝸輪5為主動件,蝸桿3為從動件。當(dāng)錨爪1逐步上升至船舶的甲板頂端,位置傳感器15檢測到錨鏈可縮短的最大極限,立即把信號反饋給PLC控制模塊8,模塊8即刻命令同步器10由較大齒輪嚙合逐步減少為較小齒輪嚙合,傳動比減少至30。當(dāng)錨爪1到達(dá)船舶甲板時,位置傳感器15把立即停止蝸桿3轉(zhuǎn)動的信號輸送給PLC,電磁離合器9收到命令后由多級輸入轉(zhuǎn)為單級輸入固定端,并切斷動力,使得蝸桿3停止轉(zhuǎn)動。但由于蝸輪5受慣性力的影響,仍有一定的轉(zhuǎn)速。此時,兩側(cè)的蝸桿3起到了雙倍減速自鎖的作用,此為自鎖過程。 1)電磁離合器。上述采用的是固定線圈式電磁離合器,有2個從動件連接孔,頂端孔用以單級輸入,尾部的孔用以多級輸入,以此改變傳動比。其作用是將執(zhí)行機(jī)構(gòu)的力矩(或功率)從主動軸一側(cè)傳到從動軸一側(cè),根據(jù)PLC的指令做出快速反應(yīng),以實現(xiàn)快速啟動、制動、正反轉(zhuǎn)或調(diào)速等功能。其工作原理是通過內(nèi)外摩擦片之間的摩擦力,使機(jī)械傳動系統(tǒng)中2個旋轉(zhuǎn)運動的部件,在主動部件不停止旋轉(zhuǎn)的情況下,從動部件可以與其結(jié)合或分離的電磁機(jī)械連接器,是一種自動執(zhí)行的電器件。 2)同步器。當(dāng)與蝸桿相連的從動齒輪和輸入端的主動齒輪發(fā)生嚙合時,如需要變換擋位,必然會發(fā)生沖擊碰撞,這存在“同步”的問題,這時設(shè)計出1個同步器就尤為關(guān)鍵。其基本原理是靠同步環(huán)的錐面在2個齒輪之間摩擦,使快的減慢,慢的加快,這里采用的是慣性同步器。 3)PLC控制模塊。該控制模塊由中央處理器、存儲器、編碼器、信號輸入輸出模塊組成,普遍用于精密零件工作狀態(tài)的監(jiān)控,其特點是傳輸速度快,通信功能好,不易被外界環(huán)境干擾,與其他控制器、傳感器配合使用。CAD簡圖中輸入的信號有液位傳感器、油量傳感器、轉(zhuǎn)速傳感器、位置傳感器,輸出信號為電磁離合器、油管噴嘴、齒輪箱、同步器。 4)傳感器。上述應(yīng)用的傳感器有油液傳感器、油量傳感器、轉(zhuǎn)速傳感器及位置傳感器。其中油液傳感器的工作原理是通過感受液壓的變化,隨著液壓變化,阻值也相應(yīng)變化;油量傳感器的工作原理是根據(jù)活性碳罐收集的油量的大小,判斷空氣中的含油量信號,并反饋給處理器,從而決定是否噴油;位置傳感器的作用是傳遞錨爪上升的信號;轉(zhuǎn)速傳感器的作用是檢測蝸桿蝸輪的運動情況。 2.4.1 蝸輪連接桿承受的轉(zhuǎn)矩參數(shù) 據(jù)現(xiàn)有的GB/T 549-2017 電焊錨鏈標(biāo)準(zhǔn),選擇其中的AM3-24錨鏈。它的拉力載荷為332 kN,單位質(zhì)量為12.61 kg/m。應(yīng)用于實際船舶的受力錨鏈為6節(jié),每節(jié)規(guī)定長度為27.5 m,錨爪的質(zhì)量為3.2 kg。錨鏈的許用應(yīng)力載荷為拉力載荷和自身重力載荷的矢量和。而錨鏈與蝸輪之間的動力輸入輸出則由一剛性連接桿傳遞,其上所承受的轉(zhuǎn)矩等同于錨鏈的切應(yīng)力載荷與受力距離的乘積,計算數(shù)值為55 110 N·mm,記為T1。 2.4.2 蝸桿蝸輪選型 對于蝸輪選型,其齒形較為復(fù)雜,由于其輸出存在較大的轉(zhuǎn)矩,蝸輪輪齒表面常常出現(xiàn)膠合、點蝕和磨損等失效現(xiàn)象。為盡量避免出現(xiàn)此類失效現(xiàn)象,本文敘述的蝸桿傳動均為開式傳動。其次,為獲得良好的減摩性和一定強(qiáng)度。假定蝸桿為20Cr鋼,表面淬火,硬度為58~63 HRC;蝸輪為錫青銅ZCuSn5Pb5Zn5,砂型鑄造。最后通過以下計算校核選用蝸桿蝸輪材料。 1)確定蝸輪許用應(yīng)力、蝸桿許用撓度。a.許用接觸應(yīng)力,查文獻(xiàn)[5]表12-4得[σH]=200 MPa;b.許用彎曲應(yīng)力,查文獻(xiàn)[5]表12-6得[σF]=32 MPa;c.許用撓度,由式[Y]=0.001×d1可得。 2)選擇蝸桿頭數(shù)z1,并估計傳動效率η。由i12=50查文獻(xiàn)[5]表12-2,取z1=1,則z2=i12×z1=50;由z1=1查文獻(xiàn)[5]表12-8,估計η為0.65。 3)確定蝸輪轉(zhuǎn)矩T2。T2=T1×η×i12=55110×0.65×50=1791075 N·mm。 其值小于導(dǎo)程角γ=3°30′,自鎖性較好。 7)校核彎曲強(qiáng)度。 a.確定蝸輪齒形系數(shù)YFa2,以下列公式計算當(dāng)量齒數(shù)zv: 2.4.3 電動機(jī)功率選型 蝸輪的轉(zhuǎn)動需要一定的傳動比,電動機(jī)掌握著輸入功率的大小,由以下公式可估算出保證蝸輪所需要的最少功率: 由計算可得,選擇同步轉(zhuǎn)速n1=1000 r/min擋位時,T1為55 110 N·mm可得最小功率P為5.8 kW。再由查找文獻(xiàn)可知,選擇型號為Y160M-6電動機(jī),它的功率為7.5k W,額定轉(zhuǎn)速為n2=970 r/min。 1)分析了傳統(tǒng)蝸輪蝸桿減速器基本組成及工作原理,并指出了現(xiàn)有蝸桿蝸輪自鎖存在的傳動輸出時,產(chǎn)生的摩擦損失較大、蝸桿的導(dǎo)程角增大時自鎖性能大大降低等問題。 2)針對現(xiàn)有蝸桿蝸輪自鎖存在的傳動輸出時產(chǎn)生的摩擦損失較大等問題,本文從其結(jié)構(gòu)、參數(shù)及組成等方面總結(jié)出一種新型船用蝸桿蝸輪自鎖裝置的設(shè)計要求。為滿足錨鏈固定的設(shè)計要求,從組成、結(jié)構(gòu)、成本等方面分析了該新型船用蝸桿蝸輪自鎖裝置,從而使錨鏈輪在監(jiān)測錨爪收縮和釋放的過程更具有可操控性。 3)利用AutoCAD平面設(shè)計軟件設(shè)計出了一種新型船用蝸桿蝸輪自鎖裝置,該裝置主要由齒輪箱、轉(zhuǎn)速傳感器、活性碳罐等組成,依靠傳遞齒輪箱上的轉(zhuǎn)速傳感器信號,實現(xiàn)蝸桿蝸輪減速傳動和自鎖的需求。而活性碳罐則提供自鎖所需要的潤滑環(huán)境。并從電磁離合器、同步器、PLC控制模塊及傳感器等方面介紹了該裝置的主要組成零部件。 4)為能夠適用于各式鋼板船,在工作性能層面對蝸輪連接桿、蝸桿蝸輪、電動機(jī)等方面進(jìn)行了選型設(shè)計。 本文的船用蝸桿蝸輪自鎖裝置屬于前期理論研究,是在滿足拋錨自鎖的基礎(chǔ)上加以改進(jìn)得到的,該裝置也存在一定的不足,如蝸桿蝸輪自鎖的可靠性,兩側(cè)的雙蝸桿與蝸輪的合理布局,PLC控制模塊信號的準(zhǔn)確性,改變傳動比的同步器換擋順暢性需要進(jìn)一步討論分析。因此今后可從PLC控制系統(tǒng)的信號傳輸研究,蝸桿蝸輪自鎖力的提升,新型換擋實驗?zāi)P脱邪l(fā)、新型蝸桿蝸布局結(jié)構(gòu)的優(yōu)化設(shè)計、實船實驗等方面做進(jìn)一步的研究。1.3 蝸桿蝸輪自鎖存在的問題
2 一種新型船用蝸桿蝸輪自鎖裝置設(shè)計
2.1 設(shè)計要求分析
2.2 工作原理
2.3 新型船用蝸桿蝸輪自鎖裝置主要組成零部件
2.4 船用新型蝸桿蝸輪自鎖裝置選型設(shè)計
3 結(jié)語
