一種活動發射平臺軌道行走理想速度曲線設計
2021-08-23 05:24:42李道平楊之江劉麗媛許學雷
導彈與航天運載技術 2021年4期
李道平,楊之江,劉麗媛,邢 然,許學雷
(北京航天發射技術研究所,北京,100076)
0 引 言
活動發射平臺驅動控制系統是活動發射平臺的重要組成部分,用于控制活動發射平臺承載運載火箭按照特定的軌道和速度曲線實現技術廠房與發射工位間的垂直轉運任務。某航天發射基地軌道為直線軌道,沿途設置2 處變軌道岔,見圖1。活動發射平臺需在直線軌道上在規定時間內安全、平穩、可靠地將運載火箭轉運至發射工位。理想速度曲線設計是活動發射平臺驅動控制系統設計的重要內容,開展活動發射平臺軌道行走理想速度曲線設計、確保驅動控制系統順利運行、實現平臺順利轉運是工程研制的重點和難點。

圖1 活動發射平臺轉運軌道Fig.1 The Transport Track of Mobile Launch Platform
圍繞活動發射平臺垂直轉運過程,相關學者開展了大量研究。國外相關文獻資料較少,主要圍繞發射平臺的轉運方式開展描述,在速度曲線方面未見相關報道。文獻[1]~[3]對國內外最早的活動發射平臺做了簡要介紹,對其主要速度指標進行定量描述;文獻[4]給出了某運載型號活動發射平臺驅動控制系統的主要組成及轉運的主要指標要求;文獻[5]對帶有柔性機構活動發射平臺轉運差速行走的可行性進行了分析。文獻[6]通過仿真給出了活動發射平臺速度上限的要求,并通過試驗測量了運行過程中的振動加速度值滿足任務要求;文獻[7]對活動發射平臺在圓弧曲線上的速度控制開展了研究。針對活動發射平臺的垂直轉運流程,目前相關理想速度曲線設計方面工作尚未開展。速度曲線是活動發射平臺驅動控制系統設計的重要內容,對活動發射平臺的功能和性能有重要影響。以某運載型號活動發射平臺為研究對象,圍繞直線軌道運行、經過道岔、終點減速及定位的垂直轉運全流程,開展活動發射平臺軌道行走理想速度曲線設計,與試驗結果對比分析,給出合理設計值,驗證其合理性。
1 系統組成
活動發射平臺驅動控制系統主要由上位機、控制面板、下位機、變頻器和限位傳感器等設備組成。上位機和控制面板將控制信號給定下位機,下位機利用Profibus-DP 總線控制變頻器拖動電機運行。均勻分布于行走裝置上的16臺電機驅動行走裝置輪組的運行實現活動發射平臺的運行。系統通過限位傳感器反饋電機的運行狀態等信息,實現活動發射平臺直線軌道行走、終點減速、精確定位和運行狀態監控等功能。驅動控制系統原理如圖2 所示。

圖2 某活動發射平臺驅動控制系統原理Fig.2 The Schematic of Drive Control System of Mobile Launch Platform
2 理想速度曲線設計
活動發射平臺需要在有限的時間內完成運載火箭的垂直轉運任務,最終定位精度范圍要求±15 mm,轉運過程中要保證上部運載火箭加速度不大于0.02g(g為重力加速度)。根據圖1 所示的發射場軌道的布局,活動發射平臺需完成出技術廠房、經過道岔I、經過長直軌道、經過道岔II、到達發射區減速停止。
2.1 總體設計
為保證有限時間3 h(不含因任務需要停止的時間)內完成運載火箭的垂直轉運任務,根據軌道總長度約2800 m,活動發射平臺平均速度應不低于約15.56 m/min。根據以往型號產品的設計經驗,考慮空載返回工況,設計直線軌道最高速度30 m/min;為保證加減速過程正常,采用分段加減速設計,共設置4 m/min、10 m/min、15 m/min、20 m/min、25 m/min、30 m/min 6 個速度檔,其中活動發射平臺載有運載火箭時最大速度為25 m/min。
由于在道岔上軌道存在縫隙,為了避免活動發射平臺經過縫隙時出現顛簸造成變頻器出現過壓或過流報警,初步設計經過道岔時速度降低為15 m/min;根據初步速度設計,由于活動發射平臺大部分時間運行在最大速度25 m/min 的狀態,所以如果不考慮加減速的時間,粗略估計轉運時間時可以用軌道長度除以25 m/min 估算轉場時間約為T=2800/25/60≈1.86 h。
2.2 理想速度曲線斜率設計
理想速度曲線斜率是活動發射平臺加速與減速時的加速度,與活動發射平臺的加減速時間成反比。加速時間是指變頻器輸出頻率從零上升到最大頻率所需時間,減速時間是指變頻器輸出頻率從最大頻率下降到零所需時間。加減速時間與活動發射平臺運行的加速度成反比;為提高轉場效率,降低轉運時間,活動發射平臺應盡量工作在最大速度25 m/min,即加速度應越大越好,加減速時間應越短越好,但是加減速時間受運載火箭加速度要求及活動發射平臺和軌道限制。其次加速時間越短,容易導致變頻器出現過流報警,而減速時間過短易發生變頻器過壓報警,因此需合理設計加減速時間。根據運載火箭轉場時振動加速度不大于0.02g的要求,同時考慮活動發射平臺的質量及變頻器的能力及借鑒以往型號設計經驗,初步設定加速時加速度為0.0125 m/s2≈0.0013g,減速時加速度為0.0083 m/s2≈0.00085g,既可以保證加減速過程的安全性也能保證轉運的效率。
2.3 終點定位設計
為保證活動發射平臺到位停止時定位準確,提升重復定位精度,采用2 次減速控制策略:在4~0 m/min之間增加1 個速度檔位,該速度越低,活動發射平臺重復定位精度越好,但是速度較低時,電機輸入頻率與輸出頻率呈非線性狀態,為保證該速度下活動發射平臺仍然能夠穩定運行,該速度檔位設定為0.8 m/min。實際使用時,活動發射平臺安裝終點停止限位傳感器,軌道上安裝對應的感應裝置,終點停止限位傳感器第1次觸發時,將速度減速至0.8 m/min,終點停止限位傳感器第2 次觸發時,將速度減速至0 m/min。
2.4 理想速度曲線
由2.1 至2.3 節,繪制出活動發射平臺由技術區到發射區和由發射區返回技術區的理想速度曲線見圖3。

圖3 理想速度曲線(技術廠房->發射工位)Fig 3 The Perfect Speed Curve(Testing Area ->Launch Area)
以由技術區到發射工位為例,在運行過程中,活動發射平臺依次經歷技術廠房啟動,分段加速至15 m/min,經過道岔I,加速至25 m/min,經過長直軌道,分段減速至15 m/min,經過道岔II,到達發射工位,減速定位。活動發射平臺由發射工位返回技術廠房過程同理,其中不運載火箭時速度最大可達30 m/min。
3 試驗結果
為驗證上述速度曲線設計的合理性,活動發射平臺于某發射場開展行走試驗。以技術區至發射區為例,運行過程中16 臺電機的頻率、電壓和電流曲線如圖4~6 所示,圖4 中,由于采用開環V/F 控制,所以16 臺電機頻率一致,其中頻率與活動發射平臺速度成正比,46.88 Hz 對應25 m/min。
由圖4 可知,除根據任務需要活動發射平臺停止1 次外,實際活動發射平臺運行過程中的頻率曲線與圖3理想速度曲線全程在圖像走勢和趨勢上基本一致,在直線軌道時,各電機速度給定一致。由圖5 可知,16 臺電機電壓平穩,無過電壓和欠電壓現象,由圖5和圖6 可知,電機壓頻比基本一致,運行狀態良好。由圖6 可知,整個轉運過程中16 臺電機電流平穩,雖然部分路段電流略有波動,但是仍處于正常運行的額定值(57 A)內,無過流現象。由圖4~6 橫坐標可知,轉運時間約2 h 7 min,滿足3 h 之內任務要求。
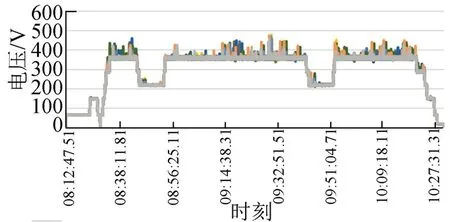
圖5 電壓曲線Fig.5 The Curve of Voltage
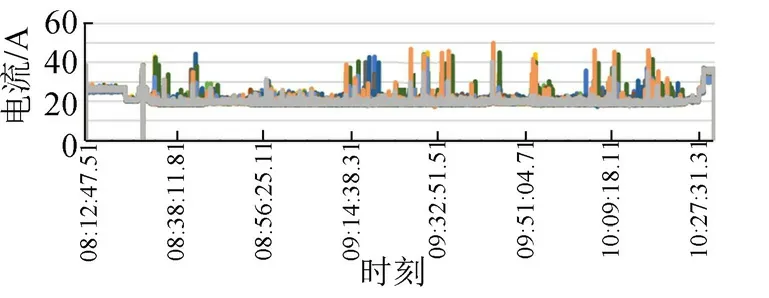
圖6 電流曲線Fig.6 The Curve of Current
綜上所述,活動發射平臺按照理想速度曲線運行,電機運行正常,壓頻比基本一致,無過流和過載等風險,轉運時間滿足要求,能夠順利完成運載火箭的垂直轉運任務,因此速度曲線設計合理可行。
4 結束語
為確保活動發射平臺在轉運軌道上完成運載火箭的垂直轉運任務,為其理想速度曲線開展了技術設計,試驗證明按照該速度曲線運行,可以實現活動發射平臺在轉運軌道上的行走,滿足任務要求,有效地提高了活動發射平臺的總體性能,順利完成運載火箭的垂直轉運任務。[1] 張福全.國外活動發射平臺述評[J].導彈與航天運載技術,1996(2):49-59.
猜你喜歡
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
中老年保健(2021年2期)2021-08-22 07:31:10
少先隊活動(2021年1期)2021-03-29 05:26:36
快樂語文(2020年30期)2021-01-14 01:05:38
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2018年3期)2018-05-09 08:20:40
海峽姐妹(2017年7期)2017-07-31 19:08:17